(54) МЕХАНИЗМ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ
И ПОВОРОТОМ ДВУХМОТОРНОГО ГУСЕНИЧНОГО
ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к механизмам управления транспортными средствами, а именно к механизмам управления гусеничными машинами с раздельным индивидуальным приводом левой и правой гусениц, в которых один орган управления совмещает несколько функций управления.
Известен механизм управления скоростью движения и поворотом двухмоторного гусеничного транспортного средства, содержащий установленную на остове с возможностью поворота относительно двух взаимно перпендикулярных осей рукоятку с двумя ведущими рычагами, каждый из которых кинематически связан с одним из двух установленных на одной оси ведомых рычагов, кинематически связанных с органами управления частотой вращения двигателей 1.
Недостатком данного механизма управления является то, что он неприменим на транспортных средствах, имеющих привод каждого движителя непосредственно от двитателя внутреннего сгорания или двигателя, имеющего подобные характеристики. Эти двигатели предъявляют требования ограничения снижения числа оборотов двигателя отстающей гусеницы во избежание его заглохания при поворотах транспортного средства и снятия этого ограничения при необходимости снижения числа оборотов обоих
5 двигателей одновременно или при необходимости их остановки.
Известный механизм не может обеспечить указанное изменение пределов управляющих воздействий.
Цель изобретения - улучшение удобства управления путем изменения пределов управляющего воздействия при повороте транспортного средства.
Указанная цель достигается тем, что механизм управления снабжен двумя упорами, установленными на каждом из ведомых рычагов, и установленным на остове подвижным в плоскости поворота рукоятки и подпружиненным включающим устройством, состоящим из двух ограничителей, закрепленных с возможностью взаимодействия с
° упорами, и приводного элемента, установленного с возможностью взаимодействия с рукояткой.
Выключающее устройство закреплено на оси, параллельной оси ведомых рычагов.
Механизм снабжен роликом, закрепленным на приводном элементе с возможностью взаимодействия с рукояткой, причем ролик установлен с возможностью осевого перемещения относительно выключающего устройства.
Кроме того, контактирующие поверхностти упоров и ограничителей выполнены со скосом.
На фиг. 1 изображен объединенный механизм управления, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - объединенный механизм управления другого исполнения, вид сбоку; на фиг. 4 - сечение на фиг. 3.
Механизм (фиг. 1 и 2) представляет собой рукоятку 1 со щтурвалом 2 на одном конце и ведущей конической щестерней 3 на другом. Рукоятка установлена поворотно вокруг оси 4 ведущего рычага и имеет возможность поворачиваться вокруг перпендикулярной ей оси 5 ведомого рычага, закрепленной в кронштейне 6 на остове 7. Ведущий и ведомые рычаги выполнены в виде конических щестерен.
Ведущая коническая щестерня входит в зацепление с двумя ведомыми коническими щестернями 8, имеющими одинаковое число зубьев. Ведомые конические щестерни поворотно установлены на оси 5 и снабжены рычагами 9, с помощью тяг 10 кинематически связанными с регуляторами, управляющими подачей энергии от источников к соответствующим приводным движителям.
Каждая ведомая щестерня имеет упор 11, а на остове подвижно установлено выключающее устройство, содержащее стопор 12, ось 13 которого параллельна оси 5. Стопор имеет два ограничителя 14 управляющих воздействий, взаимодействующие с уаорами 11 ведомых щестерен, и приводной элемент 15 с роликом 16, взаимодействующий с рукояткой 1. Ограничители стопора пружинами 17 прижимаются к радиальным поверхностям 18 кронштейна 6. Упоры 11 и ограничители 14 выполнены со скосами 19.
Стопор снабжен средствами для регулирования положения его ограничителей 14 относительно упоров 11 ведомых шестерен. Регулировочное устройство выполнено в виде щек 20, закрепленных поворотно на оси 5, одновременно являющихся опорами оси 13 стопора и снабженных пазами 21. Щеки фиксируются в требуемом положении болтами 22. Ролик 16 закреплен на приводном элементе 15 стопора также с возможностью его регулирования относительно рукоятки 1, что достигается резьбой 23 и гайкой 24.
Для обеспечения необходимого усилия на рукоятке между каждой ведомой щестерней и стенками кронштейна, имеющими податливость в направлении оси 5, установлены фрикционные щайбы 25, прижимаемые тарельчатыми пружинами 26 и гайками 27.
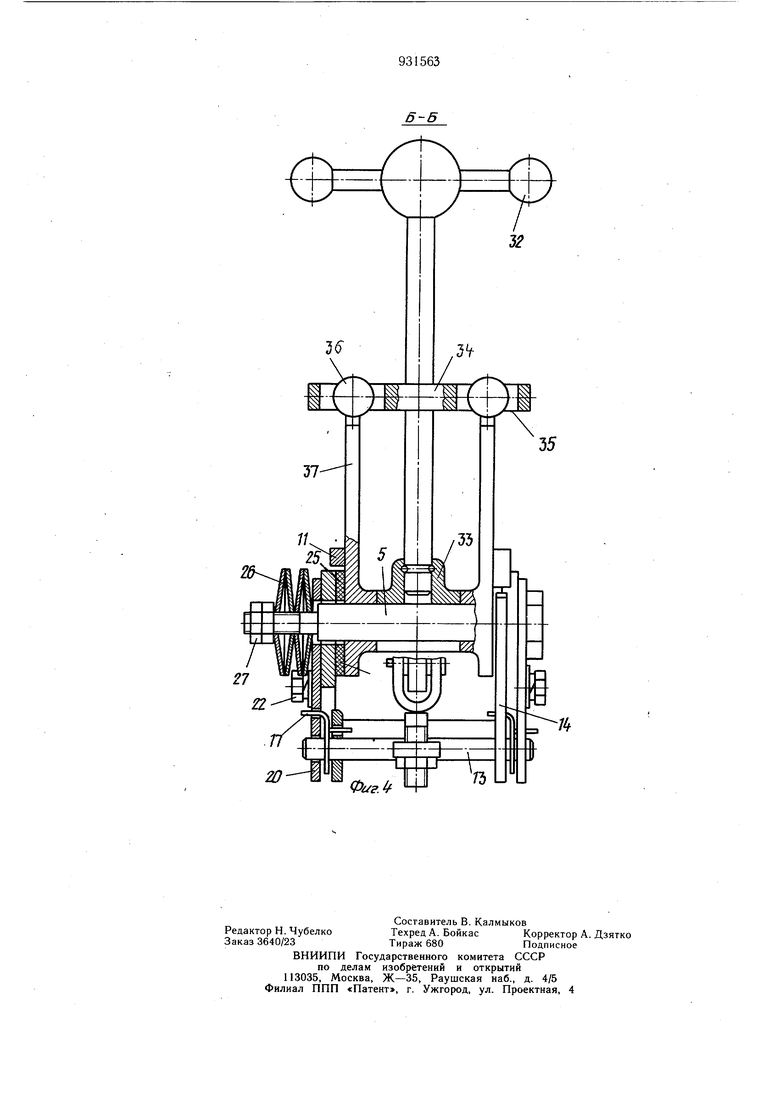
Для регулирования конического зацепления на оси 4 установлены тарельчатые пружины 28 и гайки 29, закрываемые крышкой 30. Механизм на фиг. 3 и 4 отличается от выщеописанного тем, что рукоятка 31
управления имеет рычаг 32 управления на одном конце и установлен поворотно вокруг оси 4 во втулке 33, которая имеет возможность поворачиваться вокруг оси 5. Рукоятка управления снабжена двуплечим рычагом 34 с продольными пазами 35, с помо° щью которых он взаимодействует со сферами 36 одного из плеч ведомых двуплечих рычагов 37, установленных также поворотно на оси 5. Каждое другое плечо 38 ведомых рычагов с помощью тяги 10 кинеj матически связано с регулятором, изменяющим частоту вращения двигателей. Каждый ведомый рычаг 37 имеет упор 11. Устройство стопора 12 и его регулировочные элементы выполнены так же, как и в механизме на фиг. 1 и 2.
Механизм работает следующим образом. Управление поворотом транспортного, средства осуществляется поворотом рукоятки вокруг оси 4. При этом ведущие рычаги рукоятки (ведущая коническая шестерня 3, двуплечий рычаг 34) производят поворот
ведомых рычагов (ведомых конических щестерен 8, ведомых дауплечих рычагов 37) вокруг оси 5 в противоположных направлениях, что вызывает противоположные продольные перемещения тяг 10 и соответствен,, ное изменение настройки регуляторов, управляющих частотой вращения двигателей, происходит поворот транспортного средства. При этом упор 11 ведомого рычага, кинематически связанного с регулятором отстающего борта, контактирует с соответствующим ограничителем 14 стопора, ограничивая управляющее воздействие на регулятор отстающего борта, т. е. ограничивая снижения частоты вращения двигателя отстающего борта во избежание его заглохания. Скосы 19 на контактирующих поверхностях упоров ведомых рычагов и ограничителей стопора позволяют создать дополнительное усилие прижатия ограничителей к радиальным поверхностям 18 кронштейна 6 для обеспечения надежного стопорения ведомых рычагов.
При повороте рукоятки вокруг оси 5 на прямолинейном движении транспортного средства ведущие рычаги рукоятки одновременно поворачивают оба ведомых рычага вокруг оси 5 в одном и том же направлении, вызывая одинаковые по величине и направлению продольные перемещения тяг 10 и соответственные изменения настройки регуляторов, управляющих изменением скорости транспортного средства в его прямолинейном движении за счет изменения частоты вращения двигателей. Величина скорости движения машины определяется углом отклонения рукоятки, т. е. величиной продольного перемещения тяг 10. При этом при снижении частоты вращения обоих двигателей одновременно или при их остановке рукоятка через ролик 16 и приводной элемент 15 отводит ограничители 14 стопора, преодолевая сопротивление пружин 17, что позволяет исключить ограничение управляющего воздействия и снизить частоту вращения обоих двигателей или произвести нх остановку. При увеличении же частоты вращения двигателей после прекращения воздействия рукоятки на приводной элемент стопора пружины 17 возвращают ограничители 14 стопора в их исходное положение. При одновременном повороте органа управления вокруг осей 4 и 5 происходит изменение скорости движения транспортного средства в его движении на повороте. Ограничители 14 стопора относительно упоров 11 ведомых рычагов отрегулированы так, чтобы регуляторы исключали заглохание двигателей отстающего борта при поворотах транспортного средства, а ролик 16 относительно рукоятки отрегулирован так, чтобы при снижении частоты обоих двигателей одновременно на прямолинейном движении транспортного средства приводной элемент 15 отводил ограничители 14 стопора, исключая их взаимодействия с упорами 11 ведомых рычагов. Таким образом, предлагаемый механизм исключает снижение частоты вращения одного из двигателей ниже минимальной, обеспечивающей его стабильную работу, т. е. предотвращает его заглохание при поворотах транспортного средства. В то же время механизм обеспечивает возможность одновременного снижения частоты вращения обоих двигателей до их остановки. Использование предлагаемого механизма позволяет исключить случайные заглохания двигателей и тем самым повысить производительность агрегата за счет более уверенного вождения, а также повысить срок службы деталей порщневой группы двигателей и аккумуляторных батарей за счет исключёния дополнительных запусков после заглохания двигателей при неуверенном вождении. Формула изобретения 1. Механизм управления скоростью движения и поворотом двухмоторного гусеничного транспортного средства, содержащий установленную на остове с возможностью поворота относительно двух взаимно перпендикулярных осей рукоятку с двумя ведущими рычагами, каждый из которых кинематически связан с одним из двух установленных на одной оси ведомых рычагов, кинематически связанных с органами управления частотой вращения двигателей, отличающийся тем, что, с целью улучщения удобства управления путем изменения пределов управляющего воздействия при повороте транспортного средства, механизм снабжен двумя упорами, установленными на каждом из ведомых рычагов, и установленным на остове подвижным в осевом направлении и подпружиненным выключающим устройством, состоящим из двух ограничителей, закрепленных с возможностью взаимодействия с упорами, и приводного элемента, установленного с возможностью взаимодействия с рукояткой. 2.Механизм по п. 1, отличающийся тем, что выключающее устройство закреплено на оси, параллельной оси ведомых рычагов. 3.Механизм по п. 1, отличающийся тем, что он снабжен роликом, закрепленным на приводном элементе с возможностью взаимодействия с рукояткой, причем ролик установлен с возможностью осевого перемещения относительно выключающего устройства. 4.Механизм по п. 1, отличающийся тем, что контактирующие поверхности упоров и ограничителей выполнены со скосом. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3323607, кл. 180-6.48, 1967 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления скоростью движения и поворотом двухмоторного гусеничного транспортного средства | 1988 |
|
SU1614831A2 |
| Станок для изготовления спиралей арматурных каркасов | 1979 |
|
SU878398A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Игрушечное транспортное средство | 1981 |
|
SU988306A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| МАШИНА ДЛЯ КЛЕЙМЕНИЯ ПРОКАТА | 1969 |
|
SU241374A1 |
| Инвалидная коляска | 1990 |
|
SU1794449A1 |
| Привод колес оси транспортного средства | 1976 |
|
SU863433A1 |
| Кресло-коляска | 1988 |
|
SU1572618A1 |