Изобретение относится к гироскопическому приборостроению и представляет собой способ оценки точности комплекса подготовки (КП) в процессе начальной выставки инерциальной навигационной системы (ИНС) по информации ведущей навигационной системы.
Известен способ оценки точности начальной выставки ИНС в составе КП методами математического моделирования [1]. Недостатком известного способа является обобщенность оценок точности, что не позволяет выполнить оценку точности для конкретного КП.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому способу оценки угловых невязок комплекса подготовки и точности начальной выставки ИНС является техническое решение [2], основанное на использовании в процессе натурных испытаний телеметрической информации (ТМИ) ИНС изделия процессе ее автономной работы, внешнетраекторных измерений (ВТИ) параметров движения изделия и оценке ошибок ИНС при обработке ВТИ и ТМИ на участке автономной работы ИНС.
Недостатками известного технического решения, принятого за прототип, являются:
- недостаточная достоверность получаемых оценок точности начальной выставки ИНС в составе КП, что обусловлено тем, что по результатам ТМИ и ВТИ невозможно отделить ошибки начальной выставки ИНС от других ошибок, имеющих на интервале времени автономной работы ИНС такой же характер изменения, как ошибки начальной выставки (например, для времен, значительно меньших периода Шулера, ошибки начальной выставки имеют квадратичную зависимость от времени),
- невозможность получить величину угловых невязок КП,
- высокая стоимость пусков, в которую входят стоимость изделия, стоимость организации и проведения пусков.
Задачами, на решение которых направлено изобретение, являются получение достоверных оценок точности комплекса подготовки и начальной выставки ИНС в составе комплекса за счет того, что в предлагаемом способе создаются условия для получения более достоверных оценок, процесс получения разделен по времени, снижение затрат на реализацию способа за счет того, что пуски не производятся.
Поставленные задачи решаются за счет того, что в способ оценки угловых невязок комплекса подготовки и точности начальной выставки ИНС, заключающийся и получении телеметрии ИНС в режиме ее автономной работы, внешнетраекторных измерений и их обработке, дополнительно введены операции калибровки ИНС, получения телеметрии ИНС в процессе начальной выставки векторным согласованием в составе комплекса подготовки, обработки этой телеметрии и вычисления угловых невязок комплекса подготовки, затем переводят ИНС в режим автономной работы на подвижном основании, при этом в процессе автономной работы ИНС осуществляют прямолинейное движение основания с постоянной скоростью
К существенным отличиям предложенного способа относится введение операций калибровки ИНС, за счет этого обеспечивается достоверность оценки угловых невязок комплекса, осуществления прямолинейного движения с постоянной скоростью основания, за счет чего обеспечивается достоверность оценки точности начальной выставки ИНС в составе комплекса подготовки, и исключение операции пуска, что значительно снижает затраты па реализацию способа.
Сущность изобретения поясняется его описанием и обоснованием его осуществимости.
Известно, что выставку ИНС в движении по информации ведущей системы в горизонтальных каналах осуществляют векторным или угловым согласованием в зависимости от информационного обеспечения (наличия или отсутствия достоверной информации о скорости движения), а выставку в азимуте обычно выполняют угловым согласованием. При угловом методе минимизируют ошибку углового рассогласования между ведущей и выставляемой системами, при векторном - минимизируют ошибку по скорости. При этом точность попадания изделия в заданную точку в значительной степени определяется точностью начальной выставки горизонтальных каналов ИНС. В свою очередь точность выставки определяет достоверность информации, передаваемой КП в ИНС изделия в процессе начальной выставки. При выставке угловым согласованием точность приведения ИНС в горизонт определяют угловые невязки КП от навигационной системы или системы гироскопических данных до пусковой установки. Под угловыми невязками понимают разность между истинными и заданными (передаваемыми из КП в ИНС в процессе начальной выставке ИНС) углами установки ИНС относительно корпуса носителя. Углы установки реализуют конструктивно, измерение угловых невязок в условиях применения (подвижное основание) не производят.
Для определенности рассмотрим реализацию предлагаемого технического решения в составе корабельного КП.
На неподвижном основании производят калибровку ИНС в транспортно-пусковом контейнере (ТПК), в процессе которой находят угловые невязки ИНС в ТПК. Для этого изделие в ТПК заданным образом ориентируют относительно земной системы координат, производят начальную выставку ИНС векторным согласованием в горизонтальных каналах. При этом в ИНС передают известные ориентацию корпуса носителя в земной системе координат и углы установки ИНС относительно корпуса носителя.
Оценку угловых невязок ИНС в ТПК производят по ТМИ ИНС в процессе начальной выставки. Так как угловые невязки комплекса могут быть устранены путем коррекции углов установки ТПК с изделием на пусковой установке, то в качестве угловых невязок обычно принимают разность между измеренными углами установки, которые находят по ТМИ в процессе начальной выставки ИНС, и переданными в ИНС в процессе начальной выставки углами установки ИНС на носителе. Оценку углов установки ИНС в ТПК находят, например, следующим образом:
▿ϑтпк = ϑи-ϑз, (1)
▿γтпк = γи-γз,
где ▿ϑтпк, ▿γтпк - невязки по углам тангажа и крена,
ϑз, γз - заданные углы установки тангажа и крена,
ϑи, γи - измеренные углы установки тангажа и крена;
ϑи, γи = f(Aрн) (2)
Арн=АpgАgн,
где f - оператор восстановления углов Эйлера по матрице вращения,
Aрн - матрица перехода от корпуса носителя к системе координат, связанной с ИНС,
Apg - матрица перехода от земной системы координат к корпусу ИНС,
Agн - матрица перехода от корпуса носителя к земной системе координат.
После калибровки изделие в ТПК помещается в пусковую установку КП носителя. В составе КП производят оценку угловых невязок КП на качающемся основании и точности начальной выставки ИНС на подвижном основании.
Оценку угловых невязок КП производят по ТМИ в процессе начальной выставки ИНС векторным согласованием, например, по формулам (1). Угловые невязки, найденные по формулам (1), представляют собой сумму угловых невязок ИНС в ТПК, оцененных в процессе калибровки ИНС, и угловых невязок КП. Угловые невязки КП находят как разность суммарных невязок и угловых невязок ИНС в ТПК. Следует отметить, что нулевые сигналы акселерометров, которые входят в оценку угловых невязок на неподвижном и качающемся основании, отсутствуют в оценке угловых невязок КП.
На подвижном основании после окончания начальной выставки ИНС переводят ИНС в режим автономной работы без физического пуска изделия (производят математическую отцепку). В автономном режиме работы ИНС осуществляют прямолинейное движение носителя с постоянной скоростью, что независимо от типа ИНС обеспечивает высокую степень достоверности оценок точности начальной выставки ИНС на подвижном основании. Оценку точности начальной выставки ИНС в составе КП находят по ТМИ ИНС в режиме автономной работы ИНС и ВТИ. Для получения оценок точности начальной выставки ИНС в составе КП измерения ИНС и ВТИ, например, приводят к измерениям ИНС на неподвижном или качающемся основании и производят обработку результатов методом наименьших квадратов или по формулам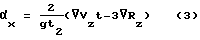
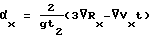
где αx, αz - ошибки начальной выставки в горизонте,
g - модуль вектора силы тяжести,
t - время автономной работы ИНС,
▿Vx, ▿Vz - ошибки ИНС по скорости в плоскости горизонта,
▿Rx, ▿Rz - ошибки ИНС по координатам в плоскости горизонта,
которые получают из решения системы уравнений (4), справедливой для малого по сравнению с периодом Шулера [3] времени автономной работы ИНС при начальной выставке на неподвижном или качающемся основании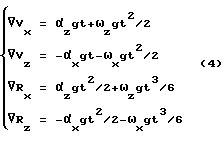
где ωx, ωz - дрейфы горизонтальных гироскопов ИНС на оси земной системы координат.
Источники информации
1. Четвертый Международный симпозиум "Интеллектуальные системы". Труды. - М., 2000, с. 95-97.
2. Методология летных испытаний пилотажно-навигационного оборудования самолетов и вертолетов. Справочная библиотека авиационного инженера-испытателя. - М.: Машиностроение, 1984, с. 40.
3. Самолетные навигационные системы. Сборник статей. - М.: ВИМО, 1973, с.286.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
| Способ коррекции координат, высоты и вертикальной скорости летательного аппарата и устройство для его осуществления | 2015 |
|
RU2619823C1 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
| СПОСОБ ОЦЕНКИ ОШИБОК И КОНТРОЛЯ ДАТЧИКОВ ПЕРВИЧНОЙ ИНФОРМАЦИИ В СОСТАВЕ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В НАЗЕМНЫХ УСЛОВИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2537513C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2427799C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СПОСОБ ПОДГОТОВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ К ПОЛЕТУ | 2013 |
|
RU2529757C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ НАД ВОДНОЙ ПОВЕРХНОСТЬЮ (ВАРИАНТЫ) | 2008 |
|
RU2394264C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2309385C2 |
Изобретение относится к гироскопическому приборостроению. Способ оценки угловых невязок комплекса подготовки и оценки точности начальной выставки инерциальной навигационной системы (ИНС) заключается в получении телеметрии ИНС в режиме ее автономной работы, внешнетраекторных измерений и их обработке. При этом предварительно калибруют ИНС, получают телеметрию ИНС в процессе начальной выставки векторным согласованием в составе комплекса подготовки. Обрабатывают полученную телеметрию и вычисляют угловые невязки комплекса подготовки. Затем переводят ИНС в режим автономной работы на подвижном основании. В процессе автономной работы ИНС осуществляют прямолинейное движение основания с постоянной скоростью. Технический результат состоит в получении достоверной оценки точности комплекса подготовки и начальной выставки ИНС в составе комплекса.
Способ оценки угловых невязок комплекса подготовки и оценки точности начальной выставки инерциальной навигационной системы (ИНС), заключающийся в получении телеметрии ИНС в режиме ее автономной работы, внешнетраекторных измерений и их обработке, отличающийся тем, что предварительно калибруют ИНС, получают телеметрию ИНС в процессе начальной выставки векторным согласованием в составе комплекса подготовки, обрабатывают эту телеметрию и вычисляют угловые невязки комплекса подготовки, затем переводят ИНС в режим автономной работы на подвижном основании, при этом в процессе автономной работы ИНС осуществляют прямолинейное движение основания с постоянной скоростью.
| Методология летных испытаний пилотажно-навигационного оборудования самолетов и вертолетов | |||
| Справочная библиотека авиационного инженера-испытателя | |||
| - М.: Машиностроение, 1984, с | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| US 5359889 А, 01.11.1994 | |||
| US 4012018 А, 15.03.1977. | |||

