Изобретение относится к транспорту и может быть использовано на транспортных средствах в условиях бездорожья, а также на плавсредствах и в производстве игрушек.
Известен "Шагающий движитель транспортного средства" (авт. свид. 41148, кл. В 62 Д 57/02, 1971г.), содержащий опоры, выполненный в виде кривошипно-кулисного механизма, при этом кулиса своим свободным концом связана с опорой через промежуточную площадку, обеспечивающей возможность плоскопараллельного перемещения ее относительно корпуса.
Недостатками данного решения являются ненадежность конструкции и малая скорость передвижения.
Прототипом является "Шагающий движитель" (патент США 1682717, кл. В 62 Д 57/02, 1928г. ), содержащий размещенный в корпусе транспортного средства привод вращения: кривошипы, образующие коленвал; стабилизирующее устройство и ноги, закрепленные на кривошипах и связанные со стабилизирующим устройством.
Недостатками данного решения являются ненадежность и малая скорость передвижения, что снижает эффективность движителя.
Сущность заявленного решения в том, что вездеходный движитель содержит размещенные в корпусе транспортного средства ноги, привод вращения, по меньшей мере два кривошипа, связанных между собой и с приводом вращения, стабилизирующее устройство, связанное с ногами, причем он снабжен опорой, закрепленной на упомянутом корпусе, и упорами. Cтабилизирующее устройство состоит из маятникового рычага и по меньшей мере одного упругого элемента, один конец упоров шарнирно закреплен на ноге, другой конец упоров шарнирно закреплен на маятниковом рычаге, шарнирно закрепленном на упомянутом корпусе. Или упор одним концом шарнирно крепится на ноге, а вторым концом шарнирно крепится на упомянутом корпусе. Минимум конструктивных элементов, их простота, большая подвижность на шарнирах, высокая скорость передвижения позволяют решить задачу повышения эффективности.
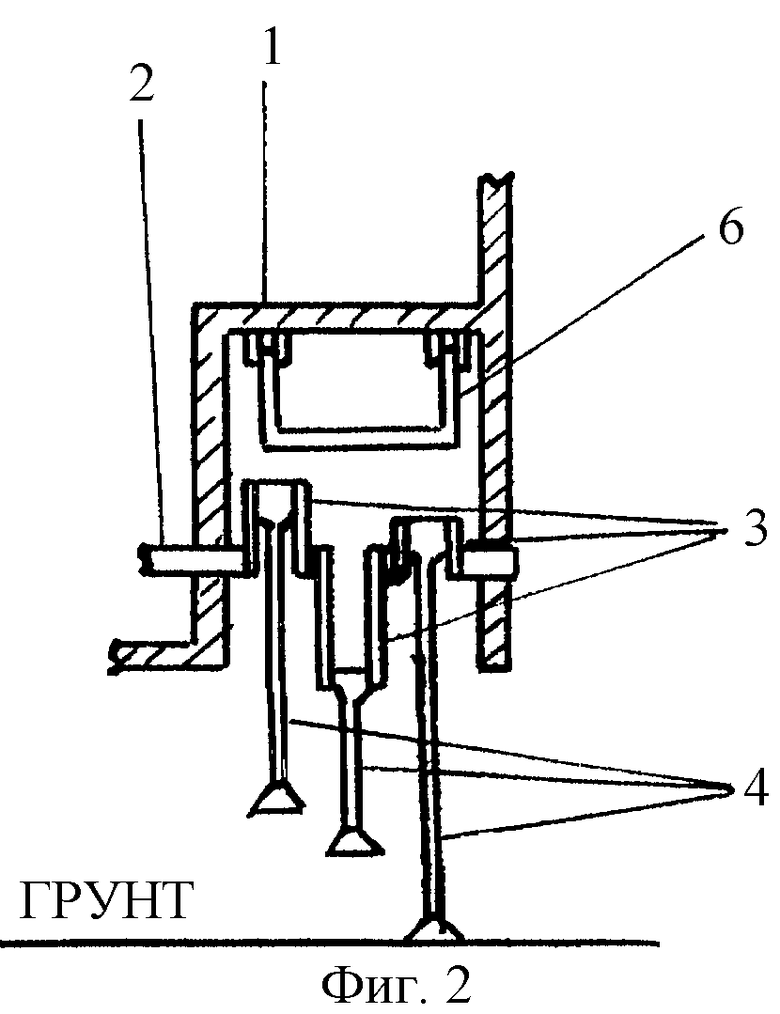
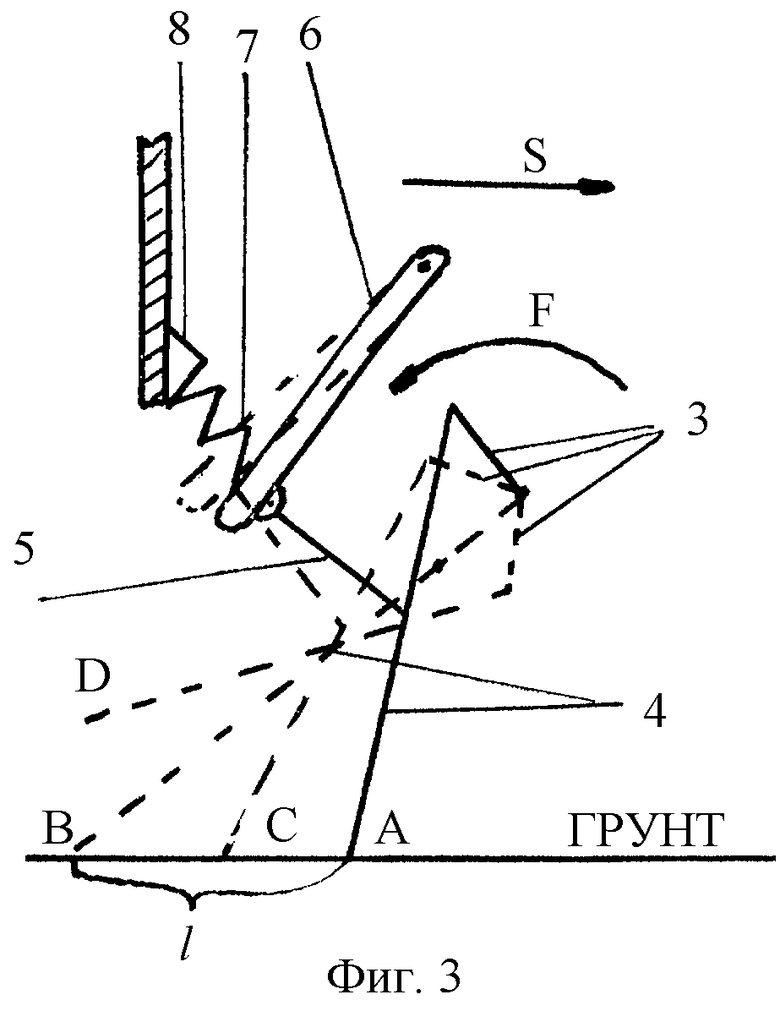
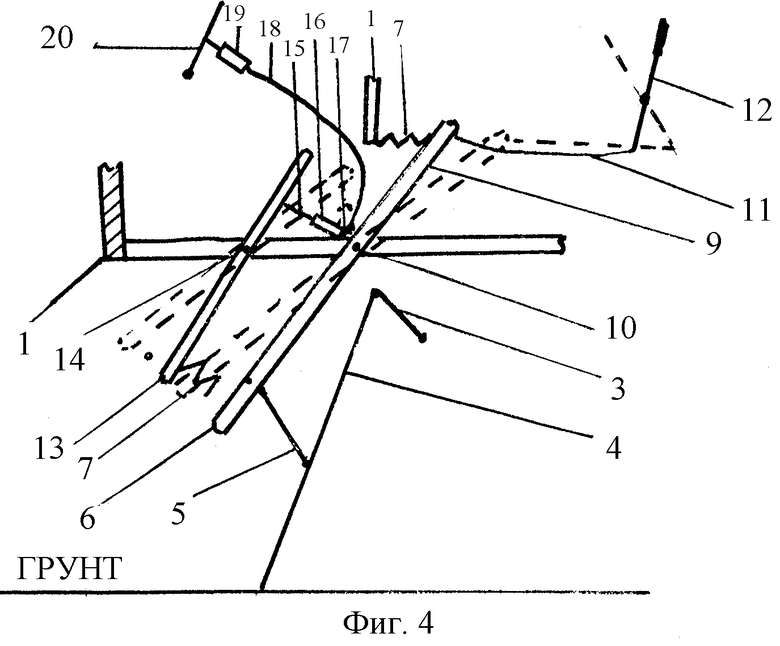
На фиг.1 - 4 показана конструкция заявленного устройства: на фиг.1 - вид сбоку транспортного средства; на фиг.2 - вид сзади (стабилизирующее устройство не показано); на фиг.3 - принцип действия; на фиг.4 - подъемное тормозное устройство.
Имеется корпус транспортного средства 1, привод вращения 2, связанные с ним кривошипы 3, на кривошипах закреплены ноги 4, с которыми связано стабилизирующее устройство, включающее в себя упор 5, шарнирно закрепленный между ногой и П-образным маятниковым рычагом 6. Последний шарнирно закреплен на корпусе 1, и между маятниковым рычагом и корпусом транспортного средства размещен упругий элемент (пружина) 7 через опору 8. Для приведения движителя в подвешенное положение рычаг 6 выполнен в виде коромысла с верхним плечом 9 (фиг. 4), коромысло закреплено на корпусе 1 с помощью шарнира 10 и подпружинено к корпусу упругим элементом 7. Плечо 9 связано с приводом системы управления, включающим в себя тросик 11, связанный с ручкой управления 12. Имеется также тормозная система, содержащая упругий элемент 7, одним концом закрепленный на тормозном рычаге 13, закрепленном на корпусе 1 с помощью шарнира 14. С рычагом 13 связан шток 15 тормозного цилиндра 16, последний закреплен на корпусе шарнирно 17. С тормозным цилиндром 16 соединен привод 18, идущий от главного цилиндра 19, с последним связана тормозная педаль 20.
Предлагается вариант (не показан), когда кривошипы с ногами расположены вдоль продольной оси транспортного средства и связаны между собой кинематически - посредством шестерен, цепей, ремней и т.п.
Устройство работает следующим образом.
При вращении кривошипа 3 (фиг.3) против часовой стрелки /F/ одна из ног приходит в положение А, при дальнейшем вращении пара кривошип - нога выпрямляется и приходит в положение В, при этом корпус транспортного средства перемещается горизонтально на расстояние l в сторону S. Это происходит вследствие того, что при упоре ноги в грунт /положение A/ и при дальнейшем вращении кривошипа 3 происходит поднятие корпуса вверх, но так как центр тяжести смещен, транспортное средство как бы падает вперед /по этому принципу перемещаются живые организмы/.
В промежуточном положении С маятниковый рычаг 6 смещается /пунктир/ и упругий элемент 7 сжимается. В положении B рычаг и элемент 7 возвращаются в прежнее положение. Когда одна нога приходит в положение В, вторая нога оказывается в положении А, и процесс повторяется. Поскольку кривошипов с ногами в каждом движителе два, три и т.д. и они строго ориентированы один относительно другого на равные углы, то поступательное движение идет беспрерывно. Пройдя положение В, нога отрывается от грунта и приходит в положение Д. Свободные концы ног все время совершают движения от положения А, через положение С и В к положению Д и от Д сразу в положение А.
В случае, когда кривошипы расположены вдоль продольной оси транспортного средства, привод вращения связан с одним из кривошипов, а вращательный момент на другие кривошипы передается через шестерни, цепи и т.п. При этом каждая нога снабжается своим отдельным стабилизирующим устройством. Возможен смешанный вариант, когда две ноги образуют коленвал, а другие две /также образующие коленвал/, связаны с первым кинематически.
При движении транспортного средства по хорошим дорогам задействовать вездеходный движитель нет необходимости - в этом случае он поднимается в подвешенное положение, а движение происходит с помощью независимых колес. Для этого ручка управления 12 (фиг.4) переводится в положение, показанное пунктиром /принцип ручного тормоза автомобиля/, при этом рычаг 6 также смещается в положение, показанное пунктиром, и весь движитель приходит в подвешенное состояние. При переводе ручки 12 в исходное положение система благодаря упругому элементу 7 опускается, т.е. движитель приходит в рабочее положение.
При торможении водитель нажимает на педаль тормоза 20 (фиг.4) и силовой момент через цилиндр 19, привод 18 и тормозной цилиндр 16 передается рычагу 13, последний смещается. При этом упругий элемент 7 надавливает на коромысло 6 и сжимается на необходимую степень. Для дальнейшего передвижения транспортного средства необходимо затратить дополнительную энергию на сжатие этой пружины, и вследствие этого транспортное средство либо замедляет скорость, либо останавливается.
В некоторых случаях стабилизирующее устройство отсутствует: при использовании движителя на водных транспортных средствах, например на водном велосипеде, при производстве игрушек /в этом случае корпус слегка подпрыгивает, но это и требуется/, при установке движителя на амортизирующей подвеске (здесь роль стабилизирующего устройства выполняет сама амортизирующая подвеска), т. е. она берет на себя все колебания системы - в этих случаях упор 5 одним концом шарнирно крепится на ногу, а вторым концом шарнирно на корпус 1.
Данный движитель может устанавливаться на заднем мосту автомобиля вместо колес, т. е. движитель снабжен амортизирующей подвеской. Для передвижения вездехода по воде в нижней части ног крепятся гребные лопатки, которые могут выполняться в форме полых чаш (полусфер).
Для того чтобы во время рабочего хода (фиг.3) не расходовалась дополнительная энергия на сжатие упругого элемента 7, он крепится лишь одним концом так, что между этой пружиной и маятниковым рычагом 6 остается зазор.
Для поднятия движителя в подвешенное положение можно использовать шток 15 тормозного цилиндра 16 (фиг. 4). Для этого конец штока выполняется с утолщением и оно размещено в пазу, сделанном в дополнительном рычаге 13, с возможностью перемещения по нему, но при этом шток не имеет возможности выскочить из него. Шток с тормозным цилиндром оснащается приводом поднятия и приводом возврата, например, двумя тросиками, связанными с двумя ручками управления и действующими в противоположных направлениях (не показаны). С помощью тросика тормозной цилиндр 16 приводится в положение, показанное пунктиром, при этом утолщенный конец штока перемещается по пазу в дополнительном рычаге 13 и вследствие этого последний приходит в положение, также показанное пунктиром.
Поскольку в этом варианте упругий элемент 7 вторым концом жестко крепится на маятниковом рычаге 6, весь движитель поднимается, т.е. приходит в подвешенное положение. Для приведения движителя в рабочее положение достаточно тормозной цилиндр (и шток) привести в исходное положение с помощью возвратного тросика.
В этом случае плечо коромысла 9 и привод 11 отсутствуют. Движитель работает как в режиме, когда вес транспортного средства держат независимые опорные системы /колеса, лыжи, воздушная подушка и т.д./, так и когда сам движитель держит на себе вес транспортного средства.
Для обеспечения заднего хода достаточно реверсировать вращение приводвого вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-лопастной движитель | 1990 |
|
SU1801792A1 |
| Погрузчик | 1985 |
|
SU1260319A1 |
| Гусеничный движитель | 1980 |
|
SU901051A1 |
| Стенд для испытания транспортных средств | 1986 |
|
SU1364944A1 |
| Стояночный тормоз транспортного средства | 1990 |
|
SU1792851A1 |
| Ловитель транспортных средств | 1982 |
|
SU1009862A1 |
| МАЯТНИКОВЫЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2096657C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ СЦЕПНЫХ КАЧЕСТВ ДОРОГИ С ТВЕРДЫМ ПОКРЫТИЕМ | 1998 |
|
RU2156844C2 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
Изобретение относится к самоходным транспортным средствам. Движитель содержит корпус, привод вращения, два кривошипа, ноги, стабилизирующее устройство, маятниковый рычаг и упор. Один конец упора шарнирно закреплен на ноге, а второй конец шарнирно закреплен на маятниковом рычаге, шарнирно закрепленном на корпусе. Между маятниковым рычагом и корпусом размещен упругий элемент. Ноги в нижней части могут иметь гребные лопатки. Изобретение направлено на решение задачи повышения надежности и увеличения скорости передвижения. 2 с. и 14 з.п.ф-лы, 4 ил.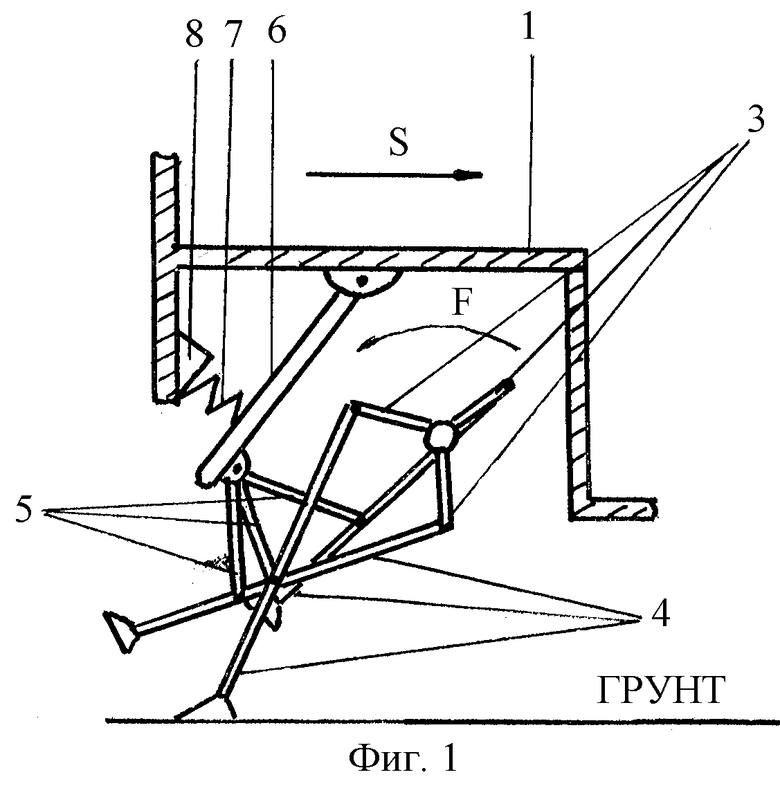
| Способ изготовления рефлектора из углепластика с высоким коэффициентом зеркального отражения | 1988 |
|
SU1682717A1 |
| US 4462476 A, 31.07.1984 | |||
| Устройство для резки материала | 1978 |
|
SU816702A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2095269C1 |

