Изобретение относится к рычажным механизмам для преобразования вращения ведущего кривошипа с постоянной угловой скоростью в противоположное вращение ведомого кривошипа с переменной угловой скоростью, а также к механизмам для воспроизведения сложных кривых, и может найти применение для интенсификации процесса перемешивания жидкостей, например, в лакокрасочной промышленности.
Известен механизм шарнирного антипараллелограмма, содержащий вращающиеся в разные стороны ведущий и ведомый кривошипы, шарнирно соединенные с шатуном и со стойкой, и устройство для вывода механизма из мертвых положений, выполненное в виде раздельно установленных на кривошипах некруглых зубчатых секторов, дважды за цикл соударяющихся между собой в мертвых положениях механизма [1].
Недостатком известного механизма является низкая надежность работы из-за возникающих при соударениях зубчатых секторов дополнительных динамических нагрузок, а также большие затраты на изготовление некруглых зубчатых секторов.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является механизм шарнирного антипараллелограмма, содержащий вращающиеся в разные стороны ведущий и ведомый кривошипы, шарнирно соединенные с шатуном и со стойкой, и устройство для вывода из мертвых положений, выполненное в виде раздельно установленных на кривошипах звеньев кулачкового механизма, дважды за цикл соударяющихся между собой в мертвых положениях механизма [2].
Недостатками наиболее близкого аналога являются низкая надежность работы из-за возникающих при соударении звеньев кулачкового механизма дополнительных динамических нагрузок, а также большие затраты на точное изготовление сложных профилей звеньев кулачкового механизма.
Задачей предлагаемого изобретения является повышение надежности работы механизма шарнирного антипараллелограмма и снижение затрат на его изготовление.
Поставленная задача достигается за счет того, что в механизме шарнирного антипараллелограмма, содержащем вращающиеся в разные стороны ведущий и ведомый кривошипы, шарнирно соединенные с шатуном и со стойкой, а также устройство для вывода механизма из мертвых положений, последнее выполнено в виде двух рычагов, раздельно смонтированных на осях кривошипов по разные стороны от линии центров их вращения, установленных с неодинаковым угловым смещением относительно каждого из кривошипов и шарнирно связанных между собой посредством упругого элемента, например, в виде пружины сжатия-растяжения.
При этом с целью упрощения процесса сборки механизма за счет параллельного расположения рычагов между собой в каждом из мертвых положений механизма, рычаги установлены относительно кривошипов под острым и тупым углами, в сумме составляющими 180 градусов.
Предлагаемый вариант выполнения механизма шарнирного антипараллелограмма обеспечивает безударную работу в зоне мертвых положений, что повышает его надежность, а выполнение устройства для вывода механизма из мертвых положений в виде двух подпружиненных между собой простых рычагов не требует высокой точности и трудоемкости их изготовления, что снижает затраты на изготовление механизма.
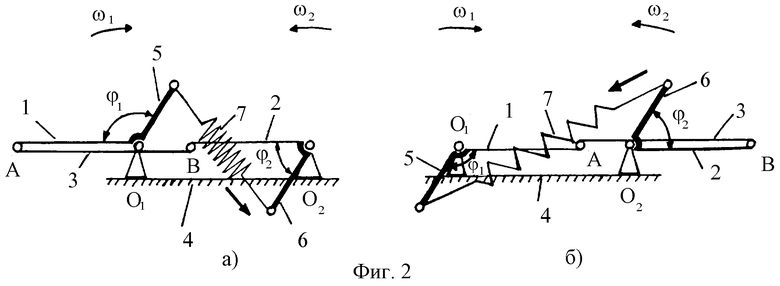
На фиг.1 приведен общий вид механизма шарнирного антипараллелограмма; на фиг.2 показаны мертвые положения механизма.
Механизм шарнирного антипараллелограмма состоит из ведущего кривошипа 1 и ведомого кривошипа 2, шарнирно соединенных шатуном 3 и стойкой 4, а также содержит устройство для вывода из мертвых положений в виде рычагов 5 и 6, раздельно смонтированных на осях кривошипов 1 и 2 по разные стороны от линии соединения центров их вращения, установленных под разными углами ϕ1 и ϕ2 относительно каждого из кривошипов и шарнирно связанных между собой посредством упругого элемента 7, например, в виде пружины сжатия-растяжения. Рычаг 5 жестко соединен с кривошипом 1 под углом ϕ1, а рычаг 6 жестко соединен с кривошипом 2 под углом ϕ2≠ϕ1.
При этом рычаги установлены относительно кривошипов под острым и тупым углами, в сумме составляющими 180 градусов (ϕ1+ϕ2 = 180°), что обеспечивает их параллельное расположение и упрощает сборку.
Механизм шарнирного антипараллелограмма работает следующим образом. Вращение ведущего кривошипа 1 со скоростью ω1 передается через шатун 3 на ведомый кривошип 2 и вызывает его вращение в противоположную сторону с переменной угловой скоростью ω2 (фиг.1). В одном из мертвых положений (фиг.2а) рычаг 5 сжимает упругий элемент 7 относительно рычага 6, что создает на ведомом кривошипе 2 дополнительный вращающий момент в сторону ω2 и за счет этого принудительно выводит механизм из указанного мертвого положения. В другом мертвом положении (фиг.2б) упругий элемент растянут рычагом 5 относительно рычага 6, что создает на ведомом кривошипе 2 вращательный момент также в сторону ω2 и за счет этого принудительно выводит механизм из другого мертвого положения.
В результате этого повышается надежность работы механизма, так как отсутствует ударное взаимодействие его звеньев в зоне мертвых положений, и по сравнению с кулачковым и зубчатым устройствами вывода механизма из мертвых положений снижаются затраты на его изготовление.
Согласно общему виду на фиг.1 изготовлена действующая модель механизма шарнирного антипараллелограмма с устройством в виде двух подпружиненных между собой рычагов, обеспечивающих надежный вывод механизма из обоих мертвых положений. При установке в таком механизме рабочего органа в виде месильной лопасти в середине шатуна 3 (точка Е) он будет перемещаться по замкнутой петлеобразной траектории, что при его применении, например, в лакокрасочной промышленности повышает интенсивность перемешивания жидкости (лаки, краски) по сравнению с существующей траекторией движения рабочего органа по окружности.
Источники информации
1. Кожевников С.Н. и др. Механизмы. - М.: Машиностроение, 1965 г., с.93, рис. 2.78,6 (аналог).
2. Там же, с.93, фиг.2.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЕЖУЩИЙ АППАРАТ ЖАТВЕННЫХ МАШИН | 2015 |
|
RU2606095C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СМЕСИТЕЛЬ | 1999 |
|
RU2162364C1 |
| СМЕСИТЕЛЬ | 1998 |
|
RU2154521C2 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ИЗМЕНЯЕМОЙ СТРУКТУРЫ | 2020 |
|
RU2750997C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
Изобретение относится к рычажным механизмам для преобразования вращения ведущего кривошипа с постоянной угловой скоростью в противоположное вращение ведомого кривошипа с переменной угловой скоростью. Механизм шарнирного антипараллелограмма содержит вращающиеся в разные стороны ведущий и ведомый кривошипы, шарнирно соединенные с шатуном и со стойкой, а также устройство для вывода механизма из мертвых положений. Устройство для вывода механизма из мертвых положений выполнено в виде смонтированных на осях кривошипов и жестко с ними соединенных под разными углами двух рычагов, установленных по разные стороны от линии соединения центров их вращения и шарнирно связанных между собой посредством упругого элемента. Рычаги установлены относительно кривошипов соответственно под острым и тупым углами, в сумме составляющими 180o, что обеспечивает параллельное расположение между собой рычагов в каждом из мертвых положений механизма. Упругий элемент выполнен в виде пружины сжатия-растяжения. Технический результат - повышение надежности работы механизма. 1 с. и 2 з.п. ф-лы, 2 ил.
| КОЖЕВНИКОВ С.Н | |||
| и др | |||
| Механизмы | |||
| - М.: Машиностроение, с.93, фиг.2.76, 1965 | |||
| RU 94016943 A1,10.05.1996 | |||
| Пространственный шарнирно-рычажный механизм | 1984 |
|
SU1180602A1 |
| Полимерная композиция | 1980 |
|
SU935515A1 |
| Шарнирно-рычажный механизм | 1986 |
|
SU1368547A1 |

