Изобретение относится к конструкции механической руки для антропоморфных роботов.
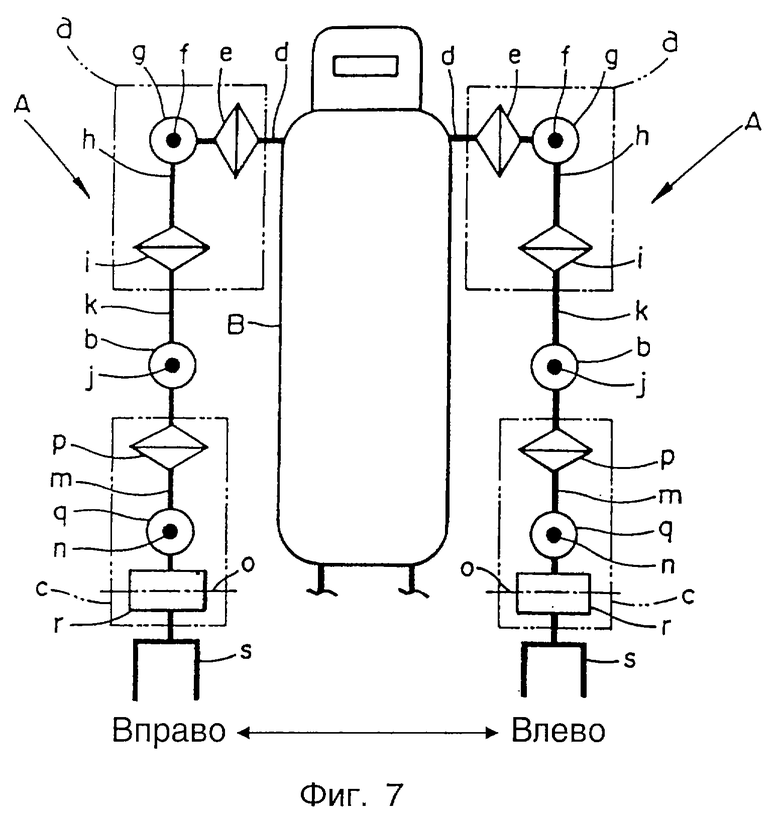
Один общеизвестный антропоморфный робот, который имеет механические руки на обеих боковых поверхностях туловища, подобно человеку использует конструкцию шарнирного соединения механической руки, показанную на фиг.7.
Антропоморфный робот имеет механические руки А, каждая из которых имеет плечевой шарнирный узел а, локтевой шарнирный узел b и запястный шарнирный узел с. Плечевой шарнирный узел а имеет первое шарнирное соединение е, соединенное с туловищем В для поворота вокруг первой оси d, которая проходит в горизонтальном направлении от верхней боковой поверхности туловища В, второе шарнирное соединение g, соединенное с первым шарнирным соединением е для поворота вокруг второй оси f (перпендикулярной плоскости, совпадающей с плоскостью чертежа, приведенного на фиг. 7), перпендикулярной первой оси d, и третье шарнирное соединение i, соединенное со вторым шарнирным соединением g для поворота вокруг третьей оси h, перпендикулярной второй оси f. Первое, второе и третье шарнирные соединения е, g, i расположены относительно друг друга так, чтобы первая, вторая и третья оси d, f, h пересекались в одной точке в произвольных рабочих положениях (угловых положениях) первого, второго и третьего шарнирных соединений, например, в третьем шарнирном соединении i.
Локтевой шарнирный узел b имеет четвертое шарнирное соединение b, соединенное с третьим шарнирным соединением i плечевого шарнирного узла а посредством верхнего рычага к для поворота вокруг четвертой оси j (перпендикулярной плоскости, совпадающей с плоскостью чертежа, приведенного на фиг.7). Запястный шарнирный узел с имеет пятое, шестое и седьмое шарнирные соединения р, q, r, которые последовательно соединены с локтевым шарнирным узлом b для поворота вокруг соответствующих пятой, шестой и седьмой осей m, n, o, которые в иллюстрируемом положении перпендикулярны друг другу. Кисть s соединена с дальним концом запястного шарнирного узла с.
Вышеописанная конструкция каждой из механических рук А позволяет плечевому шарнирному узлу а, локтевому шарнирному узлу b и запястному шарнирному узлу с работать по существу аналогичным образом, что и человеческие руки.
В роботе, показанном на фиг.7, локтевой шарнирный узел b расположен на третьей оси h третьего шарнирного соединения i плечевого шарнирного узла а. Однако локтевой шарнирный узел b может быть соединен с третьим шарнирным соединением в положении, отстоящем в радиальном направлении от третьей оси третьего шарнирного соединения.
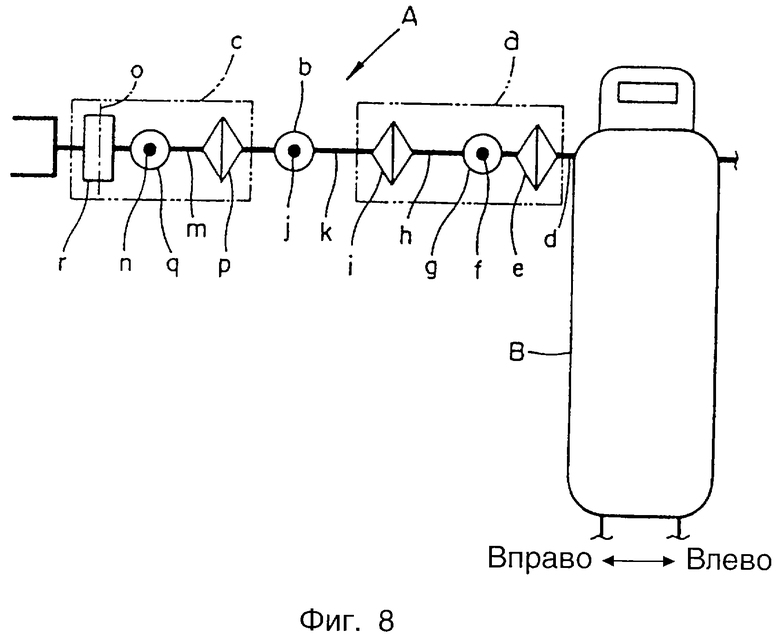
Если механическая рука А робота имеет конструкцию, которая была описана со ссылкой на фиг.8, то первая ось d первого шарнирного соединения е и третья ось h третьего шарнирного соединения i плечевого шарнирного узла а могут быть совмещены друг с другом и такое совмещенное состояние называют сингулярным состоянием (или сингулярным положением). Сингулярное состояние относится к состоянию, в котором первая ось d первого шарнирного соединения е и третья ось h третьего шарнирного соединения i совмещены друг с другом независимо от углового смещения первого шарнирного соединения е или третьего шарнирного соединения i. Такое сингулярное состояние также возникает, если локтевой шарнирный узел b соединен с третьим шарнирным соединением в положении, отстоящем в радиальном направлении от третьей оси третьего шарнирного соединения.
В сингулярном состоянии плечевой шарнирный узел а позволяет первому шарнирному соединению е или третьему шарнирному соединению i поворачиваться только вокруг первой оси d (равно как и вокруг третьей оси h), а также позволяет второму шарнирному соединению g поворачиваться только вокруг второй оси f. По этой причине локтевой шарнирный узел b, соединенный с третьим шарнирным соединением i плечевого шарнирного узла а, имеет меньшее число степеней свободы для своего положения, что в результате приводит к тому, что механическая рука А плохо поддается управлению.
Например, даже для того, чтобы немного изменить ориентацию четвертой оси j локтевого шарнирного узла b вокруг вертикальной оси в сингулярном состоянии, показанном на фиг.8, возникает необходимость управления узлом плечевого шарнирного соединения путем поворота первого шарнирного соединения е и третьего шарнирного соединения i плечевого шарнирного узла а на 90o в противоположных направлениях соответственно вокруг первой оси d и третьей оси h и после этого путем небольшого поворота второго соединения g вокруг второй оси f.
По этой причине в сингулярном состоянии плечевого шарнирного узла а для того, чтобы немного изменить положение или позицию локтевого шарнирного узла b, возникает необходимость в интенсивной манипуляции узлом а плечевого шарнирного соединения для гибкого и быстрого перевода локтевого шарнирного узла b в требуемое положение или позицию.
Вышеуказанный недостаток отсутствует в другом (несингулярном) состоянии плечевого шарнирного узла а. Например, в состоянии, показанном на фиг.7, ориентация четвертой оси j узла локтевого шарнирного соединения может быть немного изменена до требуемой ориентации путем небольшого поворота первого шарнирного соединения е или третьего шарнирного соединения i или обоих.
Авторы этой заявки обнаружили, что механические руки А антропоморфного робота вышеописанного типа работают для выполнения различных технологических операций в то время, как локтевой шарнирный узел b расположен на той же высоте или ниже, что и центр плечевого шарнирного узла а, то есть точки пересечения осей d, f, h первого, второго и третьего шарнирных соединений, например третьего шарнирного соединения i. Такая тенденция особенно сильна для копирующих антропоморфных роботов, механические руки которых работают аналогично человеческим рукам вследствие функциональной способности человеческих рук.
Однако для обычного антропоморфного робота положение и позицию первого, второго и третьего шарнирных соединений плечевого шарнирного узла а выбирали, принимая во внимание положение плечевого шарнирного узла а механической руки А, когда она совершает фактическую работу. По этой причине сингулярное состояние плечевого шарнирного узла а возникает в положениях, в которых локтевой шарнирный узел b может работать, когда работает антропоморфный робот. Например, в случае применения антропоморфного робота, показанного на фиг.7, сингулярное состояние возникает тогда, когда локтевой шарнирный узел b проходит вбок от туловища В на той же высоте, что и центр плечевого шарнирного узла а. Такое положение локтевого шарнирного узла b нормально имеет место в процессе работы антропоморфного робота. Следовательно, в процессе нормальной работы механической руки А обычного антропоморфного робота существует тенденция возникновения сингулярного состояния плечевого шарнирного узла а, в результате которого ухудшается управляемость механической рукой А в процессе нормальной работы робота.
Принимая во внимание все сказанное выше, задачей настоящего изобретения является получение конструкции механической руки для антропоморфного робота, которая минимизировала бы возникновение сингулярного состояния плечевого шарнирного узла в процессе нормальной работы механической руки антропоморфного робота, обеспечивая благодаря этому возможность плавного управления механической рукой.
Для решения вышеуказанной задачи в соответствии с настоящим изобретением предлагается конструкция механической руки для антропоморфного робота, содержащая плечевой шарнирный узел, имеющий первое шарнирное соединение, соединенное с туловищем для поворота вокруг первой оси, второе шарнирное соединение, соединенное с первым шарнирным соединением для поворота вокруг второй оси, пересекающей первую ось, и третье шарнирное соединение, соединенное со вторым шарнирным соединением для поворота вокруг третьей оси, пересекающей вторую ось, причем первая, вторая и третья оси пересекаются в одной точке, и локтевой шарнирный узел, соединенный с третьим шарнирным соединением плечевого шарнирного узла, отличающаяся тем, что положение (расположение) и, (ориентация) позиция первого, второго и третьего шарнирных соединений плечевого шарнирного узла и положение (расположение) локтевого шарнирного узла относительно третьего шарнирного соединения устанавливаются так, чтобы локтевой шарнирный узел располагался выше горизонтальной плоскости, проходящей через точку пересечения осей первого, второго и третьего шарнирных соединений, когда плечевым шарнирным узлом управляют в сингулярном состоянии, в котором первая ось первого шарнирного соединения и третья ось третьего шарнирного соединения совмещены друг с другом, а локтевой шарнирный узел расположен сбоку от туловища.
В общем, механическая рука антропоморфного робота не работает, когда локтевой шарнирный узел расположен сбоку от туловища и находится выше горизонтальной плоскости, проходящей через точку пересечения осей первого, второго и третьего шарнирных соединений, то есть через центр плечевого шарнирного узла. По этой причине путем установления положения и позиции первого, второго и третьего шарнирных соединений плечевого шарнирного узла и положения локтевого шарнирного узла относительно третьего шарнирного соединения так, чтобы локтевой шарнирный узел располагался выше горизонтальной плоскости, проходящей через точку пересечения осей первого, второго и третьего шарнирных соединений, когда плечевым шарнирным узлом управляют в сингулярном состоянии, а локтевой шарнирный узел расположен сбоку от туловища, можно предотвратить возникновение сингулярного состояния плечевого шарнирного узла, когда локтевым шарнирным узлом нормально управляют в процессе фактической работы механической руки антропоморфного робота.
По этой причине возникновение сингулярного состояния плечевого шарнирного узла минимизируют во время нормальной работы механической руки антропоморфного робота, обеспечивая в соответствии с этим возможность плавного манипулирования механической рукой.
Если локтевой шарнирный узел соединен с третьим шарнирным соединением на третьей оси третьего шарнирного соединения, то первое шарнирное соединение плечевого шарнирного узла соединено с туловищем, причем первая ось ориентирована наклонно вверх от туловища, сбоку от туловища, а второе шарнирное соединение и третье шарнирное соединение соединены соответственно с первым шарнирным соединением и вторым шарнирным соединением так, чтобы быть расположенными на первой оси последовательно от первого шарнирного соединения к локтевому шарнирному узлу в сингулярном состоянии плечевого шарнирного узла.
В соответствии с вышеуказанным устройством в сингулярном состоянии плечевого шарнирного узла локтевой шарнирный узел расположен выше горизонтальной плоскости сбоку от туловища.
Если локтевой шарнирный узел соединен с третьим шарнирным соединением в положении, отстоящим от третьей оси третьего шарнирного соединения, то положение и позиция первого, второго и третьего шарнирных соединений плечевого шарнирного узла устанавливаются так, чтобы локтевой шарнирный узел был расположен выше горизонтальной плоскости, когда плечевым шарнирным узлом управляют в сингулярном состоянии, а локтевой шарнирный узел повернут вокруг третьей оси в произвольное положение сбоку от туловища.
Характерно, что в том случае, если локтевой шарнирный узел соединен с третьим шарнирным соединением в положении, отстоящим от третьей оси третьего шарнирного соединения, когда первое шарнирное соединение и третье шарнирное соединение поворачивают соответственно вокруг первой оси и третьей оси (которые в сингулярном состоянии совмещены друг с другом) в сингулярном состоянии, положение локтевого шарнирного узла смещается по кругу, радиус которого равен расстоянию между локтевым шарнирным узлом и первой и третьей осями, а плечевой шарнирный узел находится в сингулярном состоянии в любом из угловых положений локтевого шарнирного узла. Путем установления положения и позиции первого, второго и третьего шарнирных соединений плечевого шарнирного узла так, чтобы локтевой шарнирный узел был расположен выше горизонтальной плоскости, когда плечевым шарнирным узлом управляют в сингулярном состоянии, а локтевой шарнирный узел повернут вокруг третьей оси в произвольное положение сбоку от туловища, можно минимизировать возникновение сингулярного состояния плечевого шарнирного узла при действительной работе механической руки антропоморфного робота.
Фиг. 1 - схематический вертикальный вид спереди антропоморфного робота, соответствующего первому варианту осуществления настоящего изобретения.
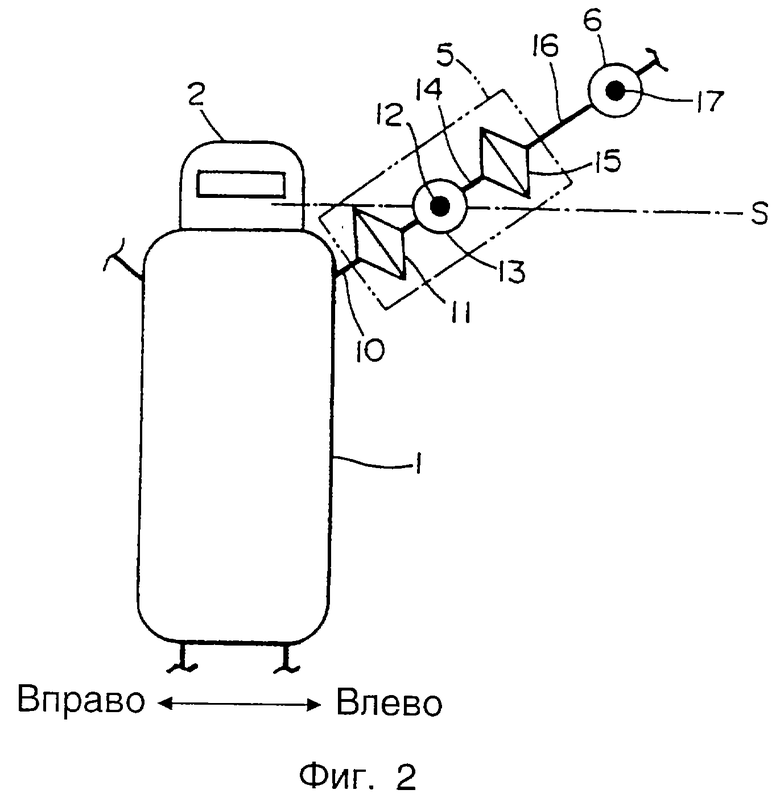
Фиг.2 - иллюстрация работы центральной части робота, показанного на фиг. 1.
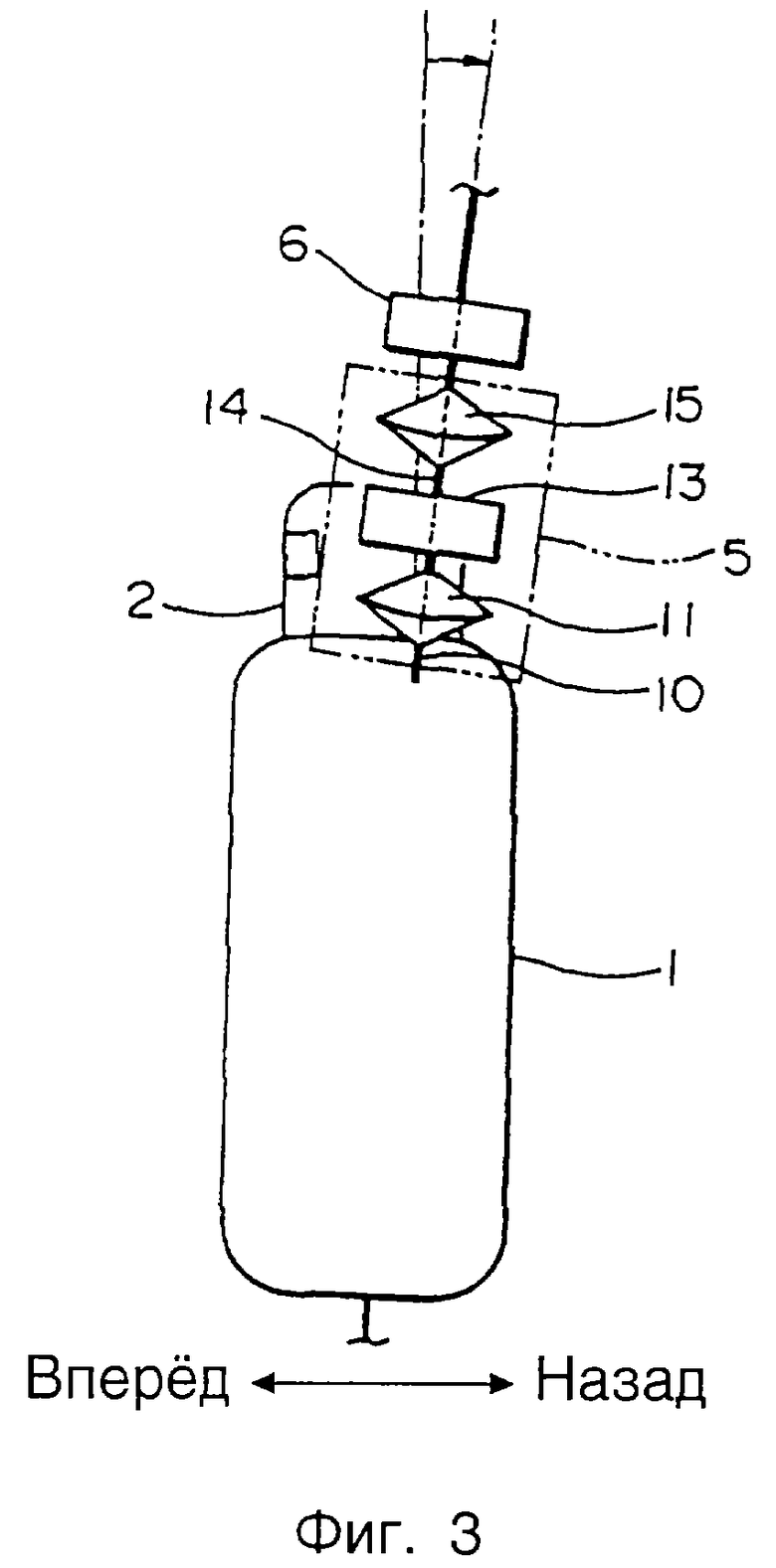
Фиг. 3 - схематический вертикальный вид сбоку центральной части антропоморфного робота, соответствующего модификации первого варианта осуществления настоящего изобретения.
Фиг. 4 - схематический вертикальный вид спереди центральной части антропоморфного робота, соответствующего второму варианту осуществления настоящего изобретения.
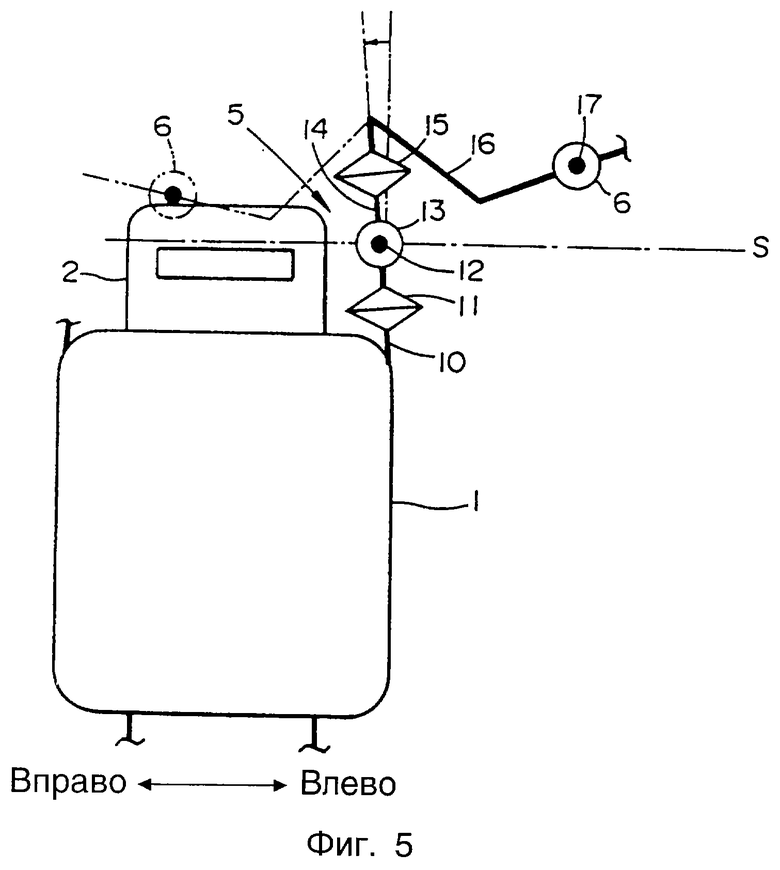
Фиг. 5 - схематический вертикальный вид спереди центральной части антропоморфного робота, соответствующего модификации второго варианта осуществления настоящего изобретения.
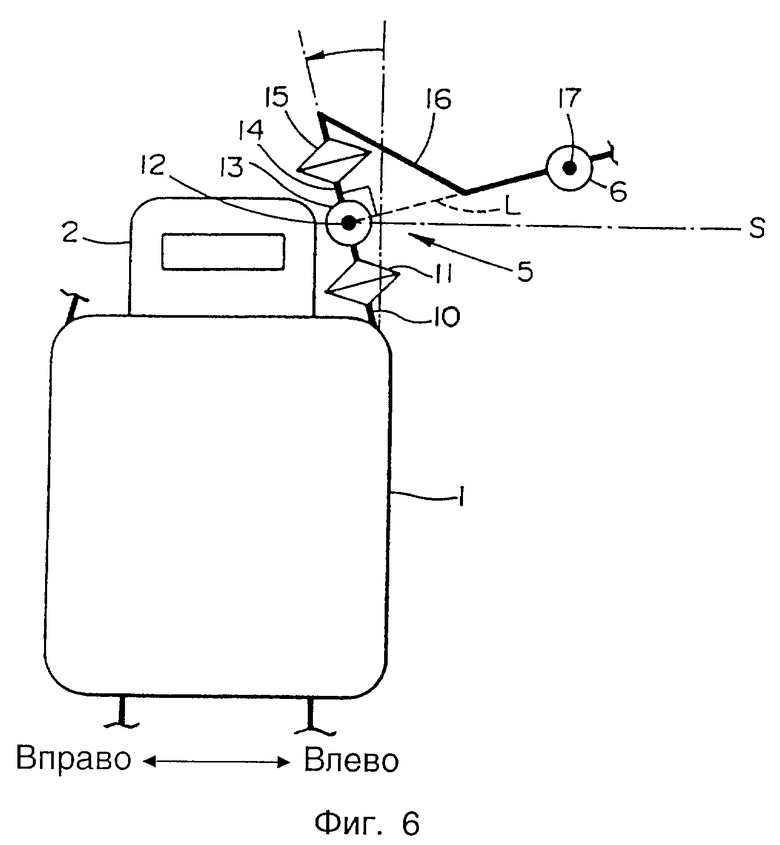
Фиг. 6 - схематический вертикальный вид спереди центральной части антропоморфного робота, соответствующего третьему варианту осуществления настоящего изобретения.
Фиг. 7 - схематический вертикальный вид спереди стандартного антропоморфного робота, известного на предшествующем уровне техники.
Фиг.8 - иллюстрация работы центральной части робота, показанного на фиг. 7.
Первый вариант осуществления настоящего изобретения будет описан ниже со ссылкой на фиг.1 и фиг.2. На фиг.1 приведен схематический вертикальный вид спереди антропоморфного робота, соответствующего первому варианту осуществления настоящего изобретения, а на фиг.2 - иллюстрация работы антропоморфного робота, показанного на фиг.1.
Как показано на фиг.1, антропоморфный робот содержит туловище 1, голову 2, смонтированную на верхней поверхности туловища 1, пару механических рук 3, проходящих от обеих верхних боковых поверхностей туловища 1 и пару механических ног 4, проходящих от нижнего торца туловища 1. Механические руки 3 имеют идентичную конструкцию и механические ноги 4 также имеют идентичную конструкцию.
Каждая из механических рук 3 содержит плечевой шарнирный узел 5, локтевой шарнирный узел б, запястный шарнирный узел 7 и кисть 9, соединенные последовательно в таком порядке от туловища 1.
Плечевой шарнирный узел 5 содержит первое шарнирное соединение 11, соединенное с туловищем 1 для поворота вокруг первой оси 10, проходящей наклонно вверх вбок из туловища 1, второе шарнирное соединение 13, соединенное с первым шарнирным соединением для поворота вокруг второй оси 12, перпендикулярной первой оси 10, и третье шарнирное соединение 15, соединенное со вторым шарнирным соединением 13 для поворота вокруг третьей оси 14 перпендикулярной второй оси 12. В иллюстрируемом состоянии вторая ось 12 проходит в направлении вперед-назад (перпендикулярном плоскости, совпадающей с плоскостью фиг. 1), а третья ось 14 проходит в вертикальном направлении. Первое, второе и третье шарнирные соединения 11, 13 и 15 расположены в таком позиционном соотношении, чтобы их оси 10, 12 и 14 пересекались в точке на второй оси 12 в их произвольных угловых положениях.
Локтевой шарнирный узел 6 содержит четвертое шарнирное соединение, соединенное с третьим шарнирным соединением 15 посредством верхнего рычага 16 на третьей оси 14. Четвертое шарнирное соединение 6 (локтевой шарнирный узел 6) поддается повороту вокруг четвертой оси 17 (проходящей, как показано, в направлении вперед-назад), перпендикулярной третьей оси 14.
Запястный шарнирный узел 7 содержит пятое шарнирное соединение 19, соединенное с четвертым шарнирным соединением 6 (локтевым шарнирным узлом 6) для поворота вокруг пятой оси 18, проходящей в направлении (в вертикальном направлении, как показано на фиг. 1), перпендикулярном четвертой оси 17, шестое шарнирное соединение 21, соединенное с пятым шарнирным соединением 19 для поворота вокруг шестой оси 20, проходящей в направлении (как показано, в направлении вперед-назад), перпендикулярном пятой оси 18, и седьмое шарнирное соединение 23, проходящее в направлении (как показано, в боковом направлении), перпендикулярном шестой оси 20. Кисть 9 соединена с седьмым шарнирным соединением 23.
Каждое первое, второе, третье, четвертое, пятое, шестое и седьмое соединение (соединение 11, 13, 15, 6, 19, 21 и 23) содержит привод вращательного движения, например, двигатель или аналогичное устройство. Этими шарнирными соединениями для выполнения определенной работы управляют посредством команд от устройства управления робота (например, ведущего устройства), которое не показано, или посредством предварительно заданных данных программирования в режиме обучения. Каждое из шарнирных соединений 11, 13, 15, 6, 19, 21, 23 может содержать линейный привод, например, цилиндр или аналогичное устройство, а не привод вращательного движения для поворота вокруг соответствующих осей 10, 12, 14, 17, 18, 20, 22.
В соответствии с вышеописанной конструкцией плечевого шарнирного узла 5, локтевого шарнирного узла 6 и запястного шарнирного узла 7, плечевой шарнирный узел 5 может поворачиваться вокруг трех осей за исключением случая, когда он находится в сингулярном состоянии, а локтевой шарнирный узел 6 и запястный шарнирный узел 8 могут поворачиваться вокруг одной оси и трех осей, соответственно. В соответствии с такими поворотными движениями каждая из механических рук 3 может работать так, как человеческая рука.
Каждая из механических ног 4 содержит тазобедренное шарнирное соединение 24, коленное шарнирное соединение 25, голеностопное шарнирное соединение 26 и стопу 27, соединенные последовательно в таком порядке от туловища 1. Хотя это и не показано детально, но тазобедренное шарнирное соединение 24 имеет такое устройство, чтобы поворачиваться вокруг трех осей в направлении вперед-назад, вбок и в вертикальных направлениях, коленное шарнирное соединение 25 имеет такое устройство, чтобы поворачиваться вокруг одной оси в боковом направлении, а голеностопное шарнирное соединение 26 имеет такое устройство, чтобы поворачиваться вокруг двух осей в направлении вперед-назад и в боковых направлениях.
В том случае, если механические руки 3 соответствуют вышеописанной конструкции, то при повороте второго шарнирного соединения 13 плечевого шарнирного узла 5 из состояния, показанного на фиг.1, в направлении против движения часовой стрелки вокруг оси 12 на угол Θ, первая ось 10 первого шарнирного соединения 11 и третья ось 14 третьего шарнирного соединения 15 совмещаются друг с другом, как показано на фиг.2, приводя в результате к возникновению сингулярного состояния плечевого шарнирного узла 5. В таком сингулярном состоянии для небольшого изменения ориентации четвертой оси 17 локтевого шарнирного узла 6 в плоскости, включающей в себя вторую ось 12 и третью ось 14, необходимо повернуть первое шарнирное соединение 11 и третье шарнирное соединение 15 плечевого шарнирного узла 5 на 90o в противоположных направлениях, а после этого поворачивать второе шарнирное соединение 13. По этой причине необходимо интенсивно манипулировать первым шарнирным соединением 11 и третьим шарнирным соединением 15.
В вышеуказанном сингулярном состоянии вследствие расположения первого, второго и третьего шарнирных соединений 11, 13, 15 плечевого шарнирного узла 5 и соединения локтевого шарнирного узла 6 с третьим шарнирным соединением 15, первое, второе и третье шарнирные соединения 11, 13, 15 и локтевой шарнирный узел 6 последовательно выстраиваются в линию вдоль первой оси 10 (равно как и вдоль третьей оси 14), проходящей наклонно вверх в боковом направлении из туловища 1.
Механическая рука 3 антропоморфного робота, соответствующего настоящему изобретению, в основном работает с локтевым шарнирным узлом 6, расположенным в или ниже горизонтальной плоскости S. По этой причине механическая рука 3 в основном не работает с локтевым шарнирным узлом 6 выше горизонтальной плоскости S. Следовательно, сингулярное состояние плечевого шарнирного узла 5 не возникает в процессе работы механической руки 3. Иначе говоря, работа плечевого шарнирного узла 5 в процессе работы механической руки 3 находится в несингулярном состоянии. В результате этого механическая рука 3 может работать плавно при гарантии того, что ей можно плавно манипулировать.
Теоретически сингулярное состояние возникает в том случае, если второе шарнирное соединение 13 повернуто на 180o вокруг второй оси 12 из состояния механической руки 3, показанного на фиг. 2. Однако на самом деле такого состояния не возникает вследствие взаимного влияния между механической рукой 3 и туловищем 1 или взаимного влияния между первым шарнирным соединением 11 и третьим шарнирным соединением 13.
В этом варианте осуществления первая ось 10 первого шарнирного соединения 11, соединенная с туловищем 1, проходит вверх непосредственно в боковом направлении из туловища 1. Однако, как показано на фиг.3, первая ось 10 может быть немного наклонена в направлении вперед-назад робота (на фиг.3 первая ось 10 немного наклонена назад).
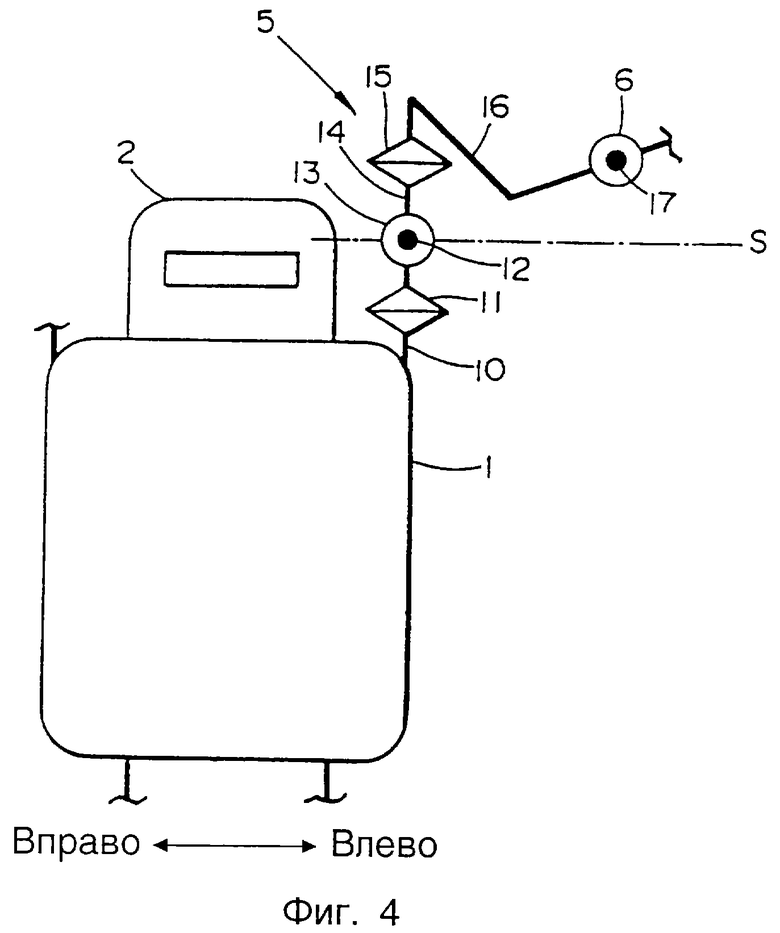
Со ссылкой на фиг. 4 ниже будет описан второй вариант осуществления настоящего изобретения. На фиг.4 представлен схематический вертикальный вид спереди центральной части антропоморфного робота, соответствующего второму варианту осуществления настоящего изобретения.
Антропоморфный робот, соответствующий второму варианту осуществления, отличается от антропоморфного робота, соответствующего первому варианту осуществления, показанному на фиг.1 и фиг.2, расположением первого, второго и третьего шарнирных соединений плечевого шарнирного узла и соединением локтевого шарнирного соединения с третьим шарнирным соединением. Детали робота указаны ссылочными номерами, которые идентичны ссылочным номерам робота, соответствующего первому варианту осуществления настоящего изобретения.
Как показано на фиг.4, плечевой шарнирный узел 5 каждой механической руки 3 (на фиг.4 показана только левая механическая рука 3 робота) антропоморфного робота, соответствующего второму варианту осуществления, имеет первое, второе и третье шарнирные соединения 11, 13, 15, соединенные последовательно в указанном порядке от туловища 1, как и в случае робота, соответствующего первому варианту осуществления. Первое шарнирное соединение 11 соединено с туловищем 1 посредством первой оси 10, проходящей вертикально вверх из туловища 1.
Локтевой шарнирный узел 6 каждой из механических рук 3 соединен с третьим шарнирным соединением 15 посредством верхнего рычага 16 в положении, отстоящем от третьей оси 14. Как показано на фиг.4, локтевой шарнирный узел 6 расположен относительно третьего шарнирного соединения 15 так, чтобы локтевой шарнирный узел 6 располагался выше горизонтальной плоскости S, проходящей через точку пересечения осей 10, 12, 14 первого, второго и третьего шарнирных соединений 11, 13, 15, когда плечевой шарнирный узел перемещается в свое сингулярное состояние, в котором первая ось 10 первого шарнирного соединения 11 и третья ось 14 третьего шарнирного соединения 15 совмещены друг с другом, а локтевой шарнирный узел 6 повернут вокруг первой оси 10 (равно как и вокруг третьей оси 14) путем поворота первого шарнирного соединения 11 или третьего шарнирного соединения 15 так, чтобы позиционировать сбоку от туловища 1. Другим способом, позиционная взаимосвязь первого, второго и третьего шарнирных соединений 11, 13, 15 (а именно расстояния между первым, вторым и третьим шарнирными соединениями) устанавливаются так, чтобы локтевой шарнирный узел 6 располагался выше горизонтальной плоскости S, когда плечевой шарнирный узел 5 перемещен в его сингулярное состояние, а локтевой шарнирный узел 6 позиционирован сбоку от туловища 1.
В представленном варианте осуществления, поскольку первая ось 10 первого шарнирного соединения 11 проходит в вертикальном направлении, локтевой шарнирный узел 6 располагается выше горизонтальной плоскости S независимо от положения, в которое поворачивают локтевой шарнирный узел 6 вокруг первой оси 10 (равно как и вокруг третьей оси 14) в иллюстрируемом сингулярном состоянии.
Другие элементы робота, соответствующего второму варианта осуществления настоящего изобретения, идентичны элементам робота, показанного на фиг.1 и . 2.
В случае антропоморфного робота, соответствующего второму варианту осуществления настоящего изобретения, когда плечевой шарнирный узел 5 переведен в его сингулярное состояние, для плавного изменения ориентации четвертой оси 17 локтевого шарнирного узла 6 вокруг направления, перпендикулярного второй оси 12 и третьей оси 14, необходимо повернуть первое шарнирное соединение 11 и третье шарнирное соединение 15 на 90o в противоположных направлениях, а после этого поворачивать второе шарнирное соединение 13. По этой причине необходимо интенсивно манипулировать первым шарнирным соединением 11 и третьим шарнирным соединением 15.
Однако в сингулярном состоянии плечевого шарнирного узла 5, даже если локтевой шарнирный узел 6 поворачивают в любое положение вокруг первой оси 10 (равно как и вокруг третьей оси 14), включая положения сбоку от туловища 1, локтевой шарнирный узел 6 располагается выше горизонтальной плоскости S. Однако механическая рука 3 в основном не работает с локтевым шарнирным узлом 6 выше горизонтальной плоскости S.
По этой причине в настоящем варианте осуществления, когда работает механическая рука 3, плечевой шарнирный узел 5 все время в основном находится в несингулярном состоянии, в результате чего механическая рука 3 может работать плавно при гарантии плавного манипулирования ею.
В этом варианте осуществления первая ось 10 первого шарнирного соединения 11 проходит в вертикальном направлении. Однако для поддержания расположения локтевого шарнирного узла 6 выше горизонтальной плоскости, даже когда локтевой шарнирный узел 6 поворачивают в любое положение вокруг первой оси 10 (равно как и вокруг третьей оси 14), включая положения сбоку от туловища 1 в сингулярном состоянии плечевого шарнирного узла 5, первая ось 10 первого шарнирного соединения 11 может быть немного наклонена внутрь к туловищу 1, как показано на фиг.5, или наоборот немного наклонена в сторону от туловища 1. Если первая ось 10 наклонена, как показано на фиг.5, то когда локтевой шарнирный узел 6 поворачивают на угол 180o вокруг первой оси 10 (равно как и вокруг третьей оси 14) из положения сбоку от туловища 1, как показано воображаемыми линиями в сингулярном состоянии плечевого шарнирного узла 5 (фактически такого состояния робота, показанного на фиг.5, не возникает, поскольку механическая рука 3 сталкивается с головой 2), высота локтевого шарнирного узла 6 является наименьшей. Даже в этом состоянии локтевой шарнирный узел 6 располагается выше горизонтальной плоскости S.
Ниже со ссылкой на фиг.6 будет описан третий вариант осуществления настоящего изобретения. Фиг.6 представляет собой схематический вертикальный вид спереди центральной части антропоморфного робота, соответствующего третьему варианту осуществления настоящего изобретения.
Антропоморфный робот, соответствующий третьему варианту осуществления, отличается от антропоморфного робота, соответствующего первому варианту осуществления, показанному на фиг.1 и фиг.2, расположением первого, второго и третьего шарнирных соединений плечевого шарнирного узла и соединением локтевого шарнирного узла с третьим шарнирным соединением. Элементы робота указаны ссылочными номерами, которые идентичны ссылочным номерам робота, соответствующего первому варианту осуществления.
Как показано на фиг.6, плечевой шарнирный узел 5 каждой механической руки 3 (на фиг.6 показана только левая механическая рука 3 робота) антропоморфного робота, соответствующего третьему варианту осуществления, имеет первое, второе и третье шарнирные соединения 11, 13, 15, соединенные последовательно в этом порядке от туловища 1, так же как и у робота, соответствующего первому варианту осуществления. Первое шарнирное соединение 11 соединено с туловищем 1, причем первая ось 10 проходит наклонно вверх от туловища 1 внутрь к туловищу 1, как у робота, показанного на фиг.5.
Локтевой шарнирный узел 6 каждой из механических рук 3 соединен с третьим шарнирным соединением 15 посредством верхнего рычага 16 в положении, отстоящем от третьей оси 14 третьего шарнирного соединения 15 так, чтобы линейный участок L (показанный на фиг.6 пунктирной линией) пересекал центр локтевого шарнирного узла 6 (на четвертой оси 17), а в точке пересечения первой, второй и третьей осей 10, 12 и 14 вторая ось 12 была перпендикулярной первой оси 10 и третьей оси 14 в иллюстрируемом сингулярном состоянии плечевого шарнирного узла 5 (в котором первая ось 10 и третья ось 14 совмещены друг с другом).
Другие элементы робота, соответствующего третьему варианту осуществления, идентичны элементам робота, соответствующего первому варианту осуществления.
В случае механических рук 3 антропоморфного робота вышеописанной конструкции, когда плечевой шарнирный узел 5 переведен в его сингулярное состояние, а локтевой шарнирный узел 6 поворачивают вокруг первой оси 10 (равно как и вокруг третьей оси 14) плечевого шарнирного узла 5 так, чтобы позиционировать сбоку от туловища 1, как показано (более определенно на левой боковой поверхности робота от второй оси 12), локтевой шарнирный узел 6 располагается выше горизонтальной плоскости S, проходящей через точку пересечения первой, второй и третьей осей 10, 12, 14.
В сингулярном состоянии плечевого шарнирного узла 5, когда локтевой шарнирный узел 6 поворачивают вокруг первой оси (равно как и вокруг третьей оси 14) внутрь к туловищу 1 (более конкретно на правой боковой поверхности робота от второй оси 12), локтевой шарнирный узел 6 располагается ниже горизонтальной плоскости S. Однако фактически, поскольку механическая рука 3 сталкивается с головой 2 и туловищем 1, локтевой шарнирный узел 6 не может поворачиваться в любое произвольное положение внутрь к туловищу 1 в сингулярном состоянии плечевого шарнирного узла 5. Таким образом, диапазон, в котором локтевой шарнирный узел 6 может поворачиваться внутрь к туловищу 1, ограничен относительно небольшим диапазоном. Кроме того, вероятность работы антропоморфного робота с локтевым шарнирным узлом 6, расположенным внутрь к туловищу 1 в сингулярном состоянии плечевого шарнирного узла 5, представляется небольшой. При повороте локтевого шарнирного узла 6 в положение сбоку от туловища 1 в сингулярном состоянии плечевого шарнирного узла 5, поскольку локтевой шарнирный узел 6 расположен выше горизонтальной плоскости S, механическая рука 3 в основном не работает в таком состоянии.
По этой причине в этом варианте осуществления механическая рука 3 нормально работает почти исключительно в несингулярном состоянии плечевого шарнирного узла 5, гарантируя, таким образом, плавное манипулирование механической рукой 3.
Конструкция механической руки антропоморфного робота, соответствующего настоящему изобретению, пригодна для копирующих антропоморфных роботов, механические руки которых работают аналогично человеческим рукам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩИЙ РОБОТ | 2001 |
|
RU2251480C2 |
| ДВУНОГИЙ РОБОТ | 2001 |
|
RU2257995C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| ДВУНОГИЙ ЛОКОМОЦИОННЫЙ РОБОТ | 2001 |
|
RU2262435C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
| СИСТЕМА СООБЩЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2002 |
|
RU2271176C2 |
| КОНСТРУКЦИЯ НОГИ РОБОТА, ПЕРЕДВИГАЮЩЕГОСЯ НА НОГАХ | 2001 |
|
RU2241595C1 |
| ОЦЕНКА СИЛ И МОМЕНТОВ СУСТАВОВ С ИСПОЛЬЗОВАНИЕМ ОБРАТНОЙ СВЯЗИ | 2002 |
|
RU2277373C2 |
| Карбюратор для двигателя внутреннего сгорания | 1975 |
|
SU1075993A3 |
| Карбюратор для двигателя внутреннего сгорания | 1975 |
|
SU993832A3 |
Изобретение относится к конструкции механической руки антропоморфного робота. Конструкция включает плечевой шарнирный узел и локтевой шарнирный узел. Плечевой шарнирный узел имеет первое шарнирное соединение, соединенное с туловищем робота, для поворота вокруг первой оси, второе шарнирное соединение, соединенное с первым шарнирным соединением, для поворота вокруг второй оси и третье шарнирное соединение, соединенное со вторым шарнирным соединением, для поворота вокруг третьей оси. Причем первая, вторая и третья оси расположены с пересечением в одной точке. Локтевой шарнирный узел, соединенный с третьим шарнирным соединением плечевого шарнирного узла на третьей оси, расположен выше горизонтальной плоскости, проходящей через точку пересечения осей шарнирных соединений, когда плечевым шарнирным узлом управляют в сингулярном состоянии, при котором первая ось первого шарнирного соединения и третья ось третьего шарнирного соединения расположены по одной линии. Изобретение позволит минимизировать возникновение сингулярного состояния плечевого шарнирного узла. 2 з.п. ф-лы, 8 ил.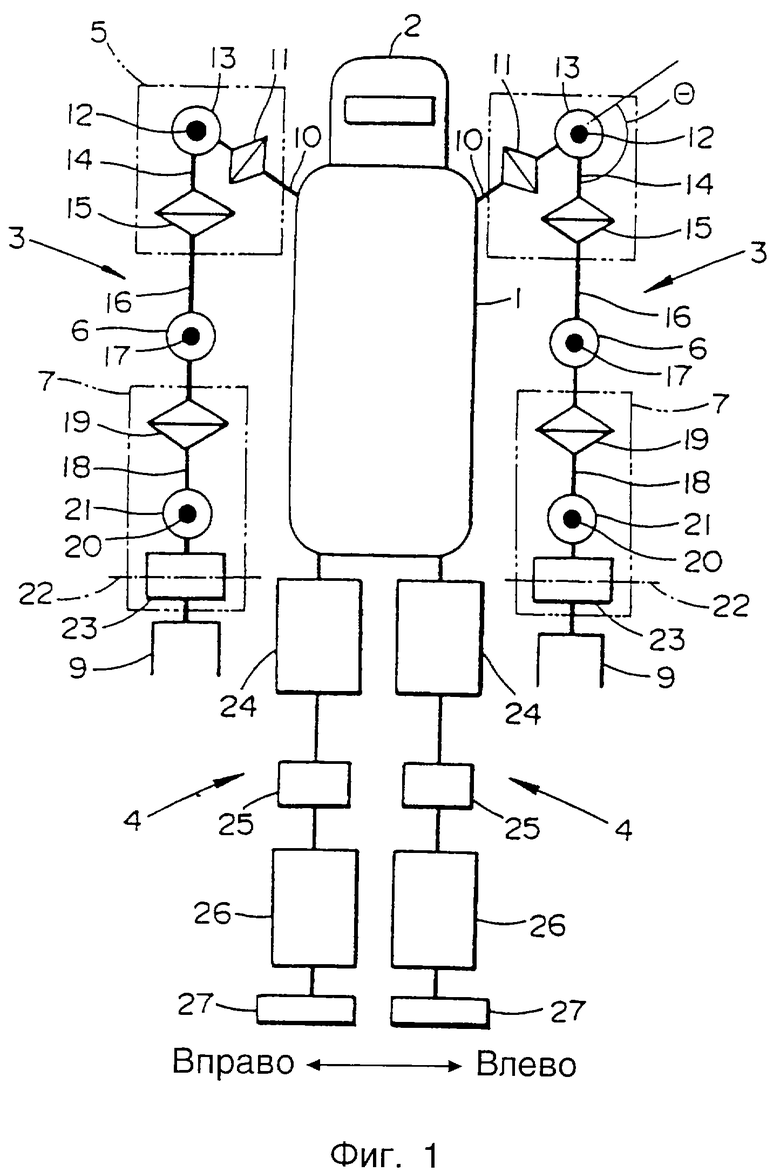
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 4095481, 20.06.1978 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |

