Изобретение относится к области автоматического регулирования, а конкретно к приводам наведения и стабилизации инерционных объектов, например приводам наведения артиллерийского вооружения подвижных объектов.
Известны следящие приводы дистанционного управления различными объектами [Следящие приводы. Под редакцией доктора технических наук, профессора Б.К.Чемоданова, том 2, М., Издательство МГТУ им. Н.Э.Баумана, 2003 г., стр.13, 14, 19, 24.], в которых в качестве корректирующей обратной связи используется сигнал, пропорциональный скорости объекта регулирования. При наличии в структуре данных приводов нелинейностей (люфтов и упругих деформаций в механической передаче) появляются проблемы с обеспечением их устойчивости к возмущающим воздействиям.
Известен следящий привод [Привод изделия П-800 ПБ1.331.082РЭ, ВНИИ "Сигнал", г.Ковров, 1992 г.] (принятый за прототип), предназначенный для наведения и стабилизации вертолетной артиллерийской установки. Этот следящий привод содержит (фиг.1) последовательно соединенные формирователь сигнала рассогласования 1, сумматор 2, исполнительный привод 3 и датчик углового положения нагрузки 4, выход которого соединен с первым входом формирователя сигнала рассогласования 1. На второй вход формирователя сигнала рассогласования 1 поступает управляющий сигнал. Выход исполнительного привода 3 является выходом следящего привода, на котором устанавливается инерционная нагрузка. Кроме того, в качестве корректирующей обратной связи в приводе используется сигнал, пропорциональный скорости изменения положения нагрузки, вырабатываемый дифференциатором 5, вход которого подключен к выходу датчика углового положения нагрузки 4, а выход - ко второму входу сумматора 2.
К недостатку данного следящего привода относятся проблемы с обеспечением одной из основных технических характеристик, а именно устойчивости к возмущающим воздействиям, при введении в его структуру для формирования желаемой частотной характеристики устройства, дифференцирующего сигнал, пропорциональный скорости изменения положения нагрузки, т.е. корректирующего сигнала по угловому ускорению нагрузки. Такое дифференцирующее устройство усиливает вместе с полезным сигналом и высокочастотные помехи, содержащиеся в скоростном сигнале. Увеличение помех до уровня, превышающего линейную зону сумматора 2, может блокировать работу канала усиления, привести к нарушению правильного функционирования привода и потере его устойчивости.
Изобретение направлено на расширение возможности обеспечения одной из основных технических характеристик, а именно устойчивости следящего привода к возмущающим воздействиям за счет введения в него корректирующего сигнала по ускорению нагрузки при использовании дифференцирующего устройства в цепи сигнала, пропорционального скорости изменения положения нагрузки. Причем для исключения влияния на работу привода высокочастотных помех, коррекция по ускорению нагрузки отключается в зоне статической ошибки привода. Тем самым повышается устойчивость привода без ухудшения его точности.
Сущность предлагаемого технического решения заключается в том, что в следящий привод, содержащий последовательно соединенные формирователь сигнала рассогласования, сумматор, исполнительный привод, выход которого является выходом следящего привода и датчик углового положения нагрузки, выход которого соединен с первым входом формирователя сигнала рассогласования, на второй вход которого поступает управляющий сигнал, а также первый дифференциатор, вход которого связан с выходом датчика углового положения нагрузки, а выход - со вторым входом сумматора, введены компаратор, источник опорного напряжения и последовательно соединенные между собой второй дифференциатор, масштабный делитель и коммутатор, выход которого соединен с третьим входом сумматора, вход второго дифференциатора соединен с выходом первого дифференциатора, причем первый вход компаратора соединен с выходом формирователя сигнала рассогласования, второй вход компаратора соединен с источником опорного напряжения, а выход компаратора соединен с управляющим входом коммутатора.
Материалы заявки поясняются чертежами, где представлены:
на фиг.1 - блок-схема следящего привода, принятого за прототип;
на фиг.2 - блок-схема предлагаемого следящего привода.
Предлагаемый следящий привод состоит из последовательно соединенных формирователя сигнала рассогласования 1, сумматора 2, исполнительного привода 3 и датчика углового положения нагрузки 4, выход которого соединен с первым входом формирователя сигнала рассогласования 1. Второй вход формирователя сигнала рассогласования 1 является управляющим входом следящего привода. Выход исполнительного привода 3, на котором устанавливается инерционная нагрузка, является выходом следящего привода. Следящий привод также содержит первый дифференциатор 5, вход которого связан с выходом датчика углового положения нагрузки 4, а выход - со вторым входом сумматора 2. В следящий привод введены компаратор 6 и последовательно соединенные второй дифференциатор 7, масштабный делитель 8 и коммутатор 9, выход которого соединен с третьим входом сумматора 2. Вход второго дифференциатора 7 соединен с выходом первого дифференциатора 5. Кроме того, первый вход компаратора 6 соединен с выходом формирователя сигнала рассогласования 1, второй вход компаратора 6 соединен с источником опорного напряжения 10, а выход компаратора 6 соединен с управляющим входом коммутатора 9.
Принцип действия предлагаемого привода заключается в том, что для повышения устойчивости следящего привода к возмущающим воздействиям используется введение отрицательной обратной связи по действующему ускорению нагрузки при работе привода вне зоны статической ошибки, т.е. при отработке больших амплитуд входных сигналов, что характерно при переброске нагрузки на значительные углы в процессе осуществления наводки на цель. Сигнал, пропорциональный действующему ускорению нагрузки, снимается с выхода второго дифференциатора 7, вход которого подключен к выходу первого дифференциатора 5, дифференцирующего сигнал датчика углового положения нагрузки 4. Глубина демпфирующей отрицательной обратной связи по действующему ускорению нагрузки задается масштабным делителем 8. С выхода масштабного делителя 8 сигнал отрицательной обратной связи через коммутатор 9 поступает на третий вход сумматора 2 только в случае, когда на управляющий вход коммутатора 9 поступает открывающий сигнал с выхода компаратора 6. Открывающий сигнал на выходе компаратора 6 появляется в моменты, когда ошибка следящего привода (сигнал на выходе формирователя сигнала рассогласования 1), поступающая на первый вход компаратора 6, превысит опорное напряжение, поданное на второй вход компаратора 6 от источника опорного напряжения 10. Уровень опорного напряжения соответствует границе зоны статической ошибки привода. Таким образом, при отработке больших управляющих воздействий (например, задание перемещения нагрузки на большой угол), когда сигнал на выходе формирователя сигнала рассогласования 1 (т.е. ошибка привода) превышает сигнал, соответствующий уровню статической ошибки, на выходе компаратора 6 появляется открывающий сигнал, который открывает коммутатор 9, подключающий к третьему входу сумматора 2 отрицательную обратную связь по ускорению, действующему на нагрузку. В этом случае исполнительный привод 3 обеспечивает эффективное торможение нагрузки в процессе отработки входного управляющего сигнала, причем после вхождения привода в зону статической ошибки, напряжение на первом входе компаратора 6 становится меньше опорного напряжения, поданного на второй вход компаратора 6. На выходе компаратора 6 появляется сигнал, закрывающий коммутатор 9, который, в свою очередь, отключает отрицательную обратную связь по ускорению от сумматора 2. Тем самым в зоне статической ошибки привода глубокая отрицательная обратная связь по ускорению отключается и тем самым исключается появление помех от дифференцирования скоростного сигнала и ухудшение точности следящего привода.
Предлагаемое техническое решение проверено математическим моделированием, а также экспериментальной проверкой макетного образца привода. Результаты проверок подтвердили расширение возможности обеспечения устойчивости и точности следящего привода за счет введения в него корректирующего сигнала по ускорению нагрузки при работе вне зоны статической ошибки.
По результатам экспериментальных исследований предлагаемое техническое решение рекомендовано к использованию в документации следящего привода модернизированного изделия П-800.
Литература
1. Следящие приводы. Под редакцией доктора технических наук, профессора Б.К.Чемоданова, том 2, М., Издательство МГТУ им. Н.Э.Баумана, 2003 г., стр.13, 14, 19, 24.
2. Привод изделия П-800 ПБ1.331.082РЭ, ВНИИ "Сигнал", г.Ковров, 1992 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 2019 |
|
RU2723331C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2017 |
|
RU2664866C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2318233C2 |
Изобретение относится к области автоматического регулирования, а конкретно к приводам наведения и стабилизации инерционных объектов, например приводам наведения артиллерийского вооружения подвижных объектов. Технический результат заключается в повышении устойчивости работы привода без ухудшения его точности. Он достигается тем, что в следящий привод, содержащий формирователь сигнала рассогласования, сумматор, исполнительный привод, датчик углового положения нагрузки и первый дифференциатор введены компаратор, источник опорного напряжения, второй дифференциатор, масштабный делитель и коммутатор. 2 ил.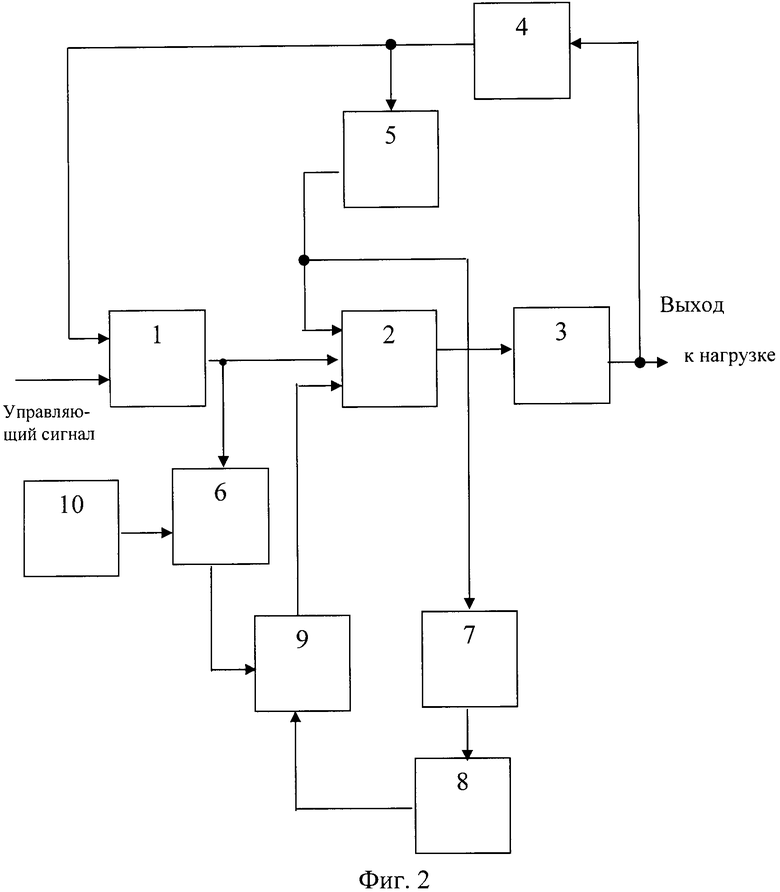
Следящий привод, содержащий последовательно соединенные формирователь сигнала рассогласования, сумматор, исполнительный привод, выход которого является выходом следящего привода, и датчик углового положения нагрузки, выход которого соединен с первым входом формирователя сигнала рассогласования, второй вход которого является управляющим входом следящего привода, а также первый дифференциатор, вход которого связан с выходом датчика углового положения нагрузки, а выход - с вторым входом сумматора, отличающийся тем, что в него введены компаратор, источник опорного напряжения и последовательно соединенные между собой второй дифференциатор, масштабный делитель и коммутатор, выход которого соединен с третьим входом сумматора, вход второго дифференциатора соединен с выходом первого дифференциатора, причем первый вход компаратора соединен с выходом формирователя сигнала рассогласования, второй вход компаратора соединен с источником опорного напряжения, а выход компаратора соединен с управляющим входом коммутатора.
| Аппарат с подвижным профилем железнодорожного пути | 1922 |
|
SU800A1 |
| Замкнутая плавучая погружаемая перемычка для возведения подводных частей гидротехнических сооружений | 1928 |
|
SU13435A1 |
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| DE 10135220 A1, 20.02.2003. | |||

