Изобретение относится к машинам для уплотнения грунта и может быть использовано в дорожном, транспортном и гидротехническом строительстве.
Известен трамбующий каток, содержащий раму с осью, закрепленные на оси и смещенные один относительно другого в осевом направлении диски и трамбующие элементы, размещенные в междисковом пространстве и шарнирно соединенные с дисками на удалении от своего центра тяжести и от оси катка (патент США 4334799, НПК 404/124, 1982 г.), являющийся прототипом изобретения.
Трамбующие элементы при движении катка с рабочей скоростью выходят из междискового пространства под действием центробежной силы, но при любой самой малой скорости эти элементы только под действием силы тяжести падают на опорную поверхность (грунт). В этом катке предусмотрена возможность удерживания трамбующих элементов в габаритах дисков, например при перебазировании на другой объект работ, путем установки вручную стопорных пальцев.
При маневрировании, например при повороте катка после прохода по уплотняемой полосе перед следующим проходом, падающие трамбующие элементы препятствуют повороту, что вызывает необходимость в стопорении этих элементов перед осуществлением маневра, и отсутствие управляемых стопоров, предназначенных для удерживания трамбующих элементов в габаритах дисков без вмешательства оператора при маневрировании катка, является недостатком известного катка.
Предлагаемое изобретение направлено на облегчение условий маневрирования.
Технический результат при осуществлении изобретения заключается в стопорении трамбующих элементов в габаритах дисков без вмешательства оператора в режиме маневрирования.
Указанный результат достигается тем, что в катке, содержащем раму с осью, закрепленные на оси и смещенные один относительно другого в осевом направлении диски, трамбующие элементы, размещенные в междисковом пространстве и шарнирно соединенные с дисками на удалении от своего центра тяжести и от оси катка, и стопоры, выполненные с возможностью удерживания трамбующих элементов в габаритах дисков, стопоры выполнены с автоматическим включением и оснащены механизмом их выключения, выполненным с возможностью выключения каждого стопора при движении катка, когда соответствующий трамбующий элемент находится в заданном положении.
При отсутствии стопора и движении катка в рабочем направлении трамбующий элемент после удара по опорной поверхности вначале полностью входит в междисковое пространство под осью катка, оставаясь во взаимодействии с опорной поверхностью, затем постепенно выходит из междискового пространства вне зависимости от величины центробежной силы (центр тяжести трамбующего элемента в этом положении смещен относительно его шарнира в сторону оси катка), пока не прекратится его контакт с опорной поверхностью, после чего дальнейшее положение трамбующего элемента определяется совместным действием силы тяжести и центробежной силы.
Автоматическое включение стопора обеспечивает его включение в момент, когда трамбующий элемент оказывается полностью в междисковом пространстве. При этом расстояние от центра тяжести трамбующего элемента до оси катка минимально, и центробежная сила имеет при данной скорости катка наименьшую величину.
Выключение стопора при таком положении трамбующего элемента, находящегося в междисковом пространстве, когда его центр тяжести и ось шарнира находятся на одной высоте над осью катка, приведет к выходу трамбующего элемента из междискового пространства только при условии, что скорость катка превышает критическую, при которой центробежная сила при минимальном расстоянии от центра тяжести трамбующего элемента до оси катка несколько превышает по абсолютной величине силу тяжести, в противном случае стопор вновь автоматически включится. Указанная величина критической скорости является верхним пределом возможной скорости маневрирования при реализации изобретения (при большей скорости стопор будет постоянно выключен).
Выключение стопора при таком положении трамбующего элемента, когда он может выйти из междискового пространства под действием одной только силы тяжести, приведет к увеличению расстояния от центра тяжести трамбующего элемента до оси катка и, следовательно, к увеличению центробежной силы при данной скорости движения катка. При дальнейшем движении катка центробежная сила будет больше, чем если бы трамбующий элемент при той же скорости находился полностью в междисковом пространстве, и трамбующий элемент не вернется полностью в междисковое пространство над осью катка при скорости гораздо меньше критической (как она была определена выше). Минимальная величина скорости, при которой трамбующий элемент не возвращается полностью в междисковое пространство над осью катка, есть нижний предел возможной рабочей скорости при реализации изобретения (при меньшей скорости стопор будет препятствовать работе трамбующего элемента).
Верхний предел возможной скорости маневрирования больше нижнего предела возможной рабочей скорости, и этими пределами ограничивается диапазон выбора минимальной рабочей скорости катка.
Момент выключения стопора выбирают между указанными выше крайними положениями трамбующего элемента в соответствии с заданной величиной минимальной рабочей скорости катка. Тогда при скорости меньше минимальной рабочей трамбующие элементы будут взаимодействовать с опорной поверхностью, только находясь полностью в междисковом пространстве, тем самым не препятствуя маневрированию.
Таким образом, выполнение стопоров с автоматическим включением, оснащение механизмом их выключения и выполнение этого механизма с возможностью выключения стопора, когда соответствующий трамбующий элемент находится в заданном положении, обеспечивают достижение технического результата.
В частной форме реализации изобретения механизм выключения выполнен с возможностью взаимодействия его входного звена с опорной поверхностью при движении катка. В этом случае момент выключения стопора задается положением звеньев механизма. В другой частной форме реализации изобретения механизм выключения выполнен с возможностью взаимодействия его входного звена с управляющим звеном, установленным на раме катка. В этом случае момент выключения стопора задается положением звеньев механизма и/или положением управляющего звена относительно рамы.
Прототипом изобретения по второму варианту так же является известный трамбующий каток, содержащий раму с осью, закрепленные на оси и смещенные один относительно другого в осевом направлении диски, и трамбующие элементы, размещенные в междисковом пространстве и шарнирно соединенные с дисками на удалении от своего центра тяжести и от оси катка, при этом предусмотрена возможность удерживания трамбующих элементов в габаритах дисков путем установки вручную стопорных пальцев (патент США 4334799, НПК 404/124, 1982 г.). Отсутствие управляемых стопоров, предназначенных для удерживания трамбующих элементов в габаритах дисков без вмешательства оператора при маневрировании катка, является недостатком известного катка.
Технический результат при осуществлении второго варианта изобретения заключается в стопорении трамбующих элементов в габаритах дисков без вмешательства оператора в режиме маневрирования.
Указанный результат достигается тем, что в катке, содержащем раму с осью, закрепленные на оси и смещенные один относительно другого в осевом направлении диски, трамбующие элементы, размещенные в междисковом пространстве и шарнирно соединенные с дисками на удалении от своего центра тяжести и от оси катка, и стопоры, выполненные с возможностью удерживания трамбующих элементов в габаритах дисков, в механизм стопора введено неуравновешенное звено, выполненное с возможностью выключения стопора, когда трамбующий элемент взаимодействует с опорной поверхностью при движении катка с рабочей скоростью, и включения - когда центр тяжести трамбующего элемента находится выше оси катка.
При отсутствии стопора и движении катка в рабочем направлении трамбующий элемент после удара по опорной поверхности вначале полностью входит в междисковое пространство под осью катка, оставаясь во взаимодействии с опорной поверхностью, затем постепенно выходит из междискового пространства вне зависимости от величины центробежной силы (центр тяжести трамбующего элемента в этом положении смещен относительно его шарнира в сторону оси катка), пока не прекратится его контакт с опорной поверхностью, после чего дальнейшее положение трамбующего элемента определяется совместным действием силы тяжести и центробежной силы. При движении катка с рабочей скоростью трамбующий элемент остается вне междискового пространства вплоть до удара по опорной поверхности, после чего цикл повторяется. При движении со скоростью маневрирования, меньшей минимальной рабочей скорости, трамбующий элемент возвратится полностью в междисковое пространство к тому моменту, когда его центр тяжести окажется над осью катка, но при отсутствии стопора упадет затем на опорную поверхность под действием в т.ч. одной только силы тяжести.
Следовательно, для маневрирования со скоростью, меньшей минимальной рабочей скорости, достаточно обеспечить включенное состояние стопора при перемещении трамбующего элемента от верхнего положения (когда его центр тяжести находится над осью катка) до положения, при котором трамбующий элемент, оставаясь в междисковом пространстве, входит во взаимодействие с опорной поверхностью. Стопор не препятствует рабочему режиму катка, если при движении катка с рабочей скоростью он отключен в положении, при котором трамбующий элемент выходит из взаимодействия с опорной поверхностью.
Механизм стопора выполняется таким образом, чтобы действующая на неуравновешенное звено сила тяжести была направлена на выключение стопора, когда трамбующий элемент находится под осью катка в междисковом пространстве, и на включение - когда трамбующий элемент находится над осью катка, а вызванная неуравновешенностью этого звена центробежная сила была всегда направлена на выключение стопора. Выбирая положение неуравновешенного звена (в т.ч. положение центра масс), можно изменять фазу переключения стопора и соотношение действующих на это звено силы тяжести и центробежной силы при заданной скорости катка. Параметры механизма могут быть выбраны таким образом, чтобы при минимальной рабочей скорости стопор гарантированно выключался, когда трамбующий элемент находится под осью катка, и гарантированно включался - когда центр тяжести трамбующего элемента находится над осью катка. При этом выключение стопора при скорости меньше минимальной рабочей не препятствует маневрированию при движении вперед - при этой скорости трамбующий элемент вернется полностью в междисковое пространство к тому моменту, когда его центр тяжести окажется над осью катка, стопор включится и удержит трамбующий элемент от падения на опорную поверхность. Готовность стопора к включению при скорости больше минимальной рабочей не препятствует работе катка - при этой скорости трамбующий элемент не вернется в междисковое пространство над осью катка.
В процессе движения катка после включения стопора сила, действующая на выходное звено механизма по направлению включения стопора, постепенно уменьшается по величине, а затем изменяет направление на противоположное. Но одновременно происходит увеличение момента, действующего на трамбующий элемент по направлению к выходу последнего из междискового пространства, и, следовательно, увеличение силы трения в паре "трамбующий элемент - выходное звено стопора", препятствующей отключению стопора. Далее трамбующий элемент, оставаясь в междисковом пространстве, входит во взаимодействие с опорной поверхностью и сила трения в паре "трамбующий элемент - выходное звено стопора" резко уменьшается или (при наличии в паре гарантированных зазоров) становится равной нулю, не препятствуя выключению стопора. Таким образом, выключение стопора происходит только при взаимодействии трамбующего элемента с опорной поверхностью.
После выключения стопора в процессе дальнейшего движения катка с рабочей скоростью сила, действующая на выходное звено механизма по направлению выключения стопора, постепенно уменьшается по величине, но в положении, когда прекращается взаимодействие трамбующего элемента с опорной поверхностью, стопор стается в выключенном состоянии, поскольку указанная сила имеет период 2π, а угловой размер рабочей поверхности трамбующего элемента значительно меньше π.
Механизм стопора, содержащий неуравновешенное звено, обеспечивает выключение стопора, когда трамбующий элемент взаимодействует с опорной поверхностью при скорости больше заданной (при этом трамбующий элемент находится полностью в междисковом пространстве и через него на опорную поверхность передается часть веса катка), а когда трамбующий элемент при движении катка со скоростью маневрирования возвращается полностью в междисковое пространство над осью катка - включение стопора и удерживание трамбующего элемента в этом пространстве. При движении катка с рабочей скоростью трамбующий элемент находится вне междискового пространства над осью катка и его работа при включении стопора не нарушается.
Таким образом, неуравновешенное звено, выполненное с возможностью выключения стопора, когда трамбующий элемент взаимодействует с опорной поверхностью при движении катка с рабочей скоростью, и включения - когда центр тяжести трамбующего элемента находится выше оси катка, обеспечивает достижение технического результата - стопорение трамбующих элементов в габаритах дисков без вмешательства оператора в режиме маневрирования.
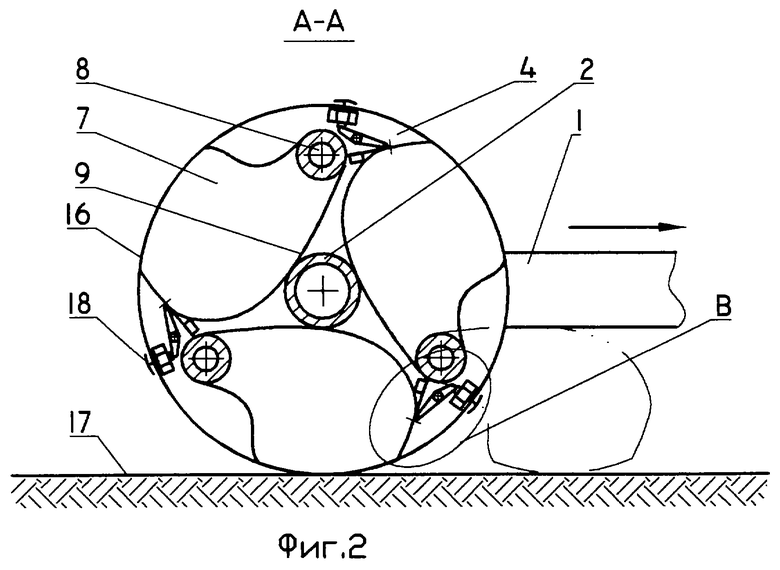
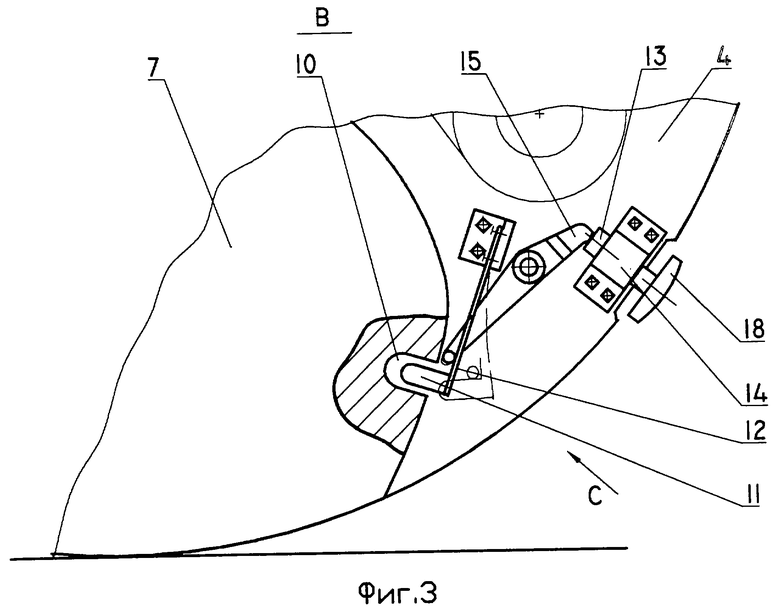
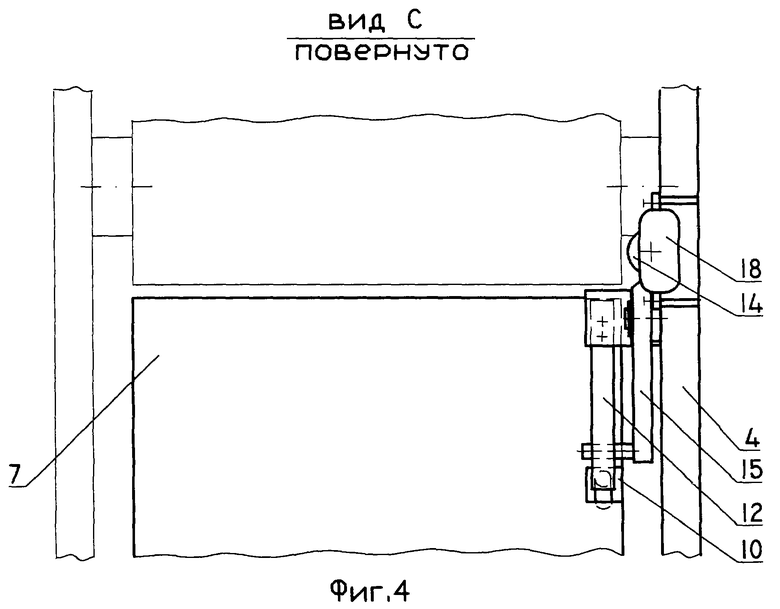
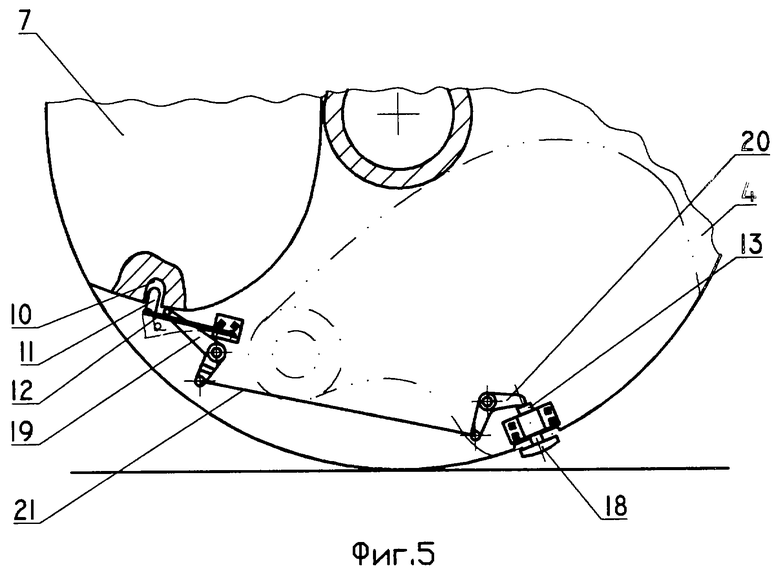
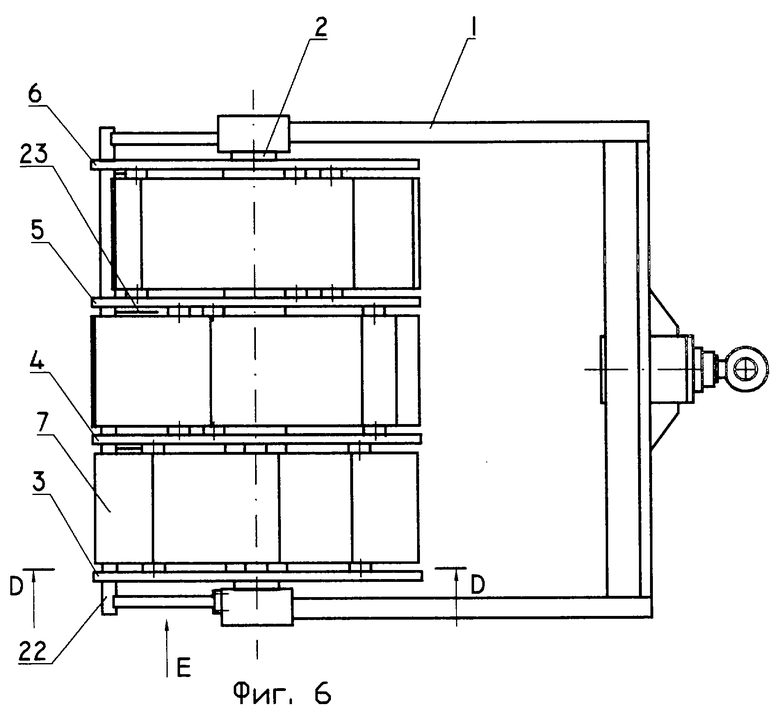
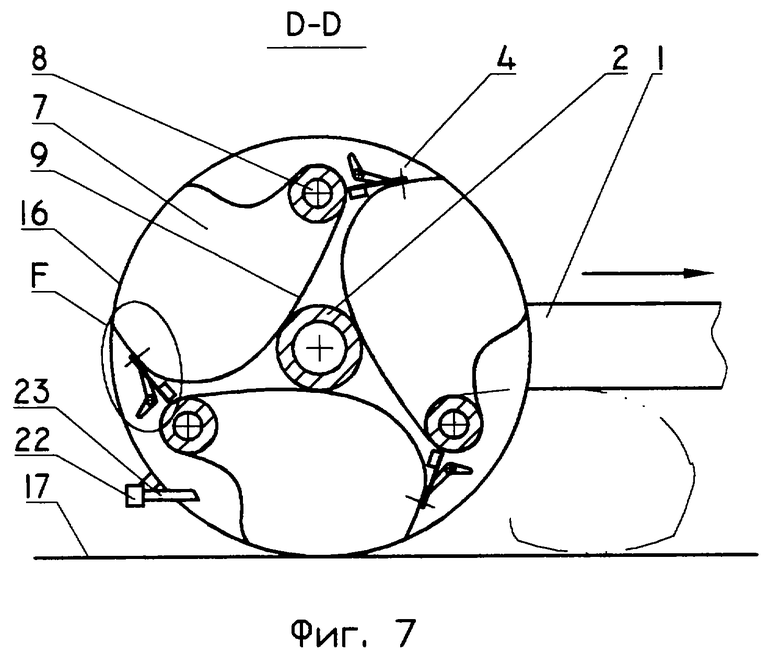
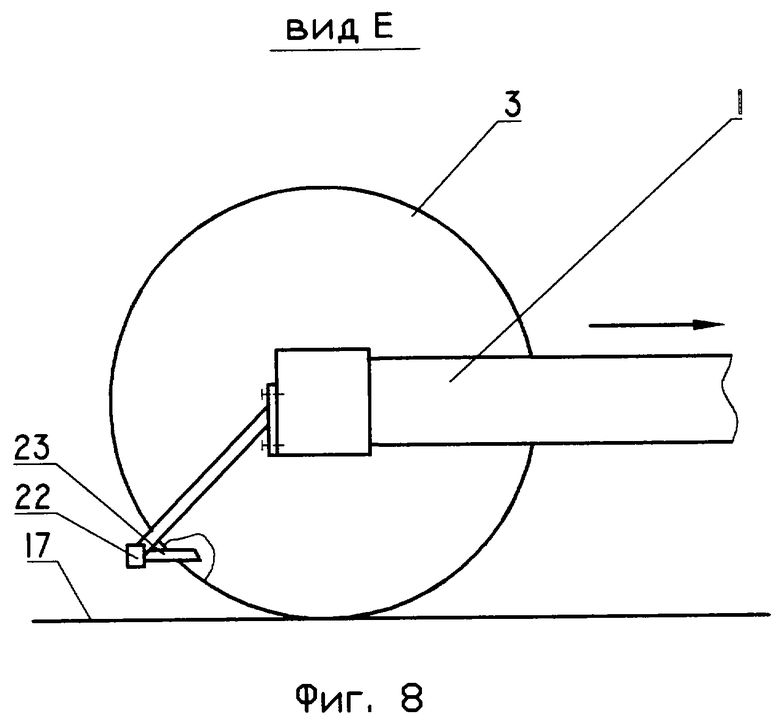
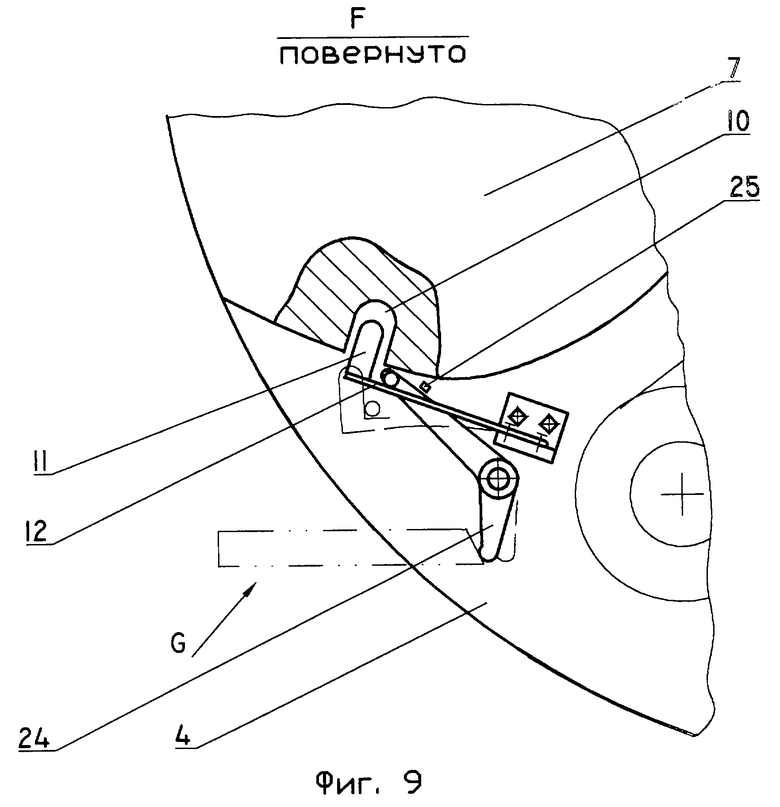
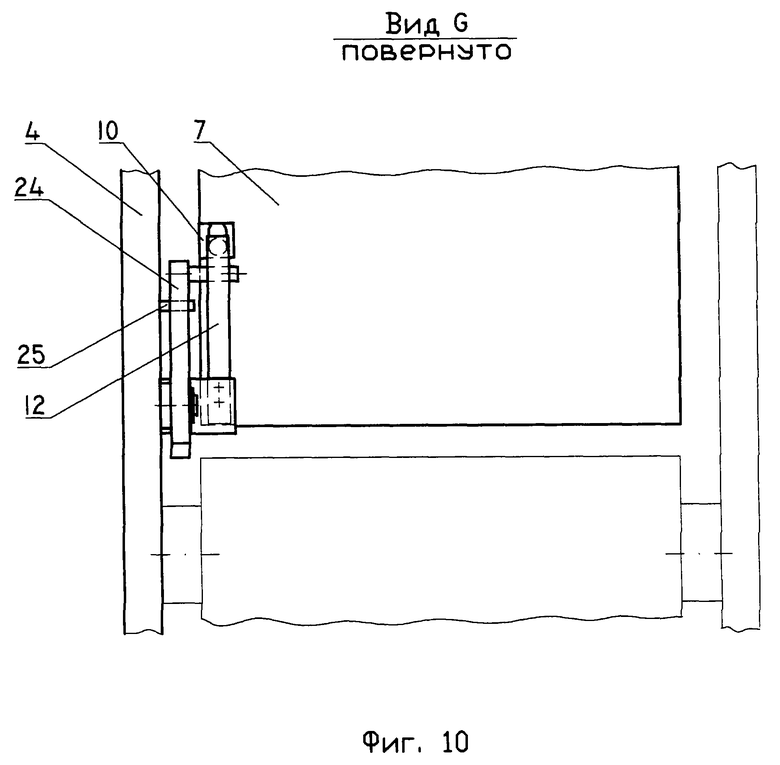
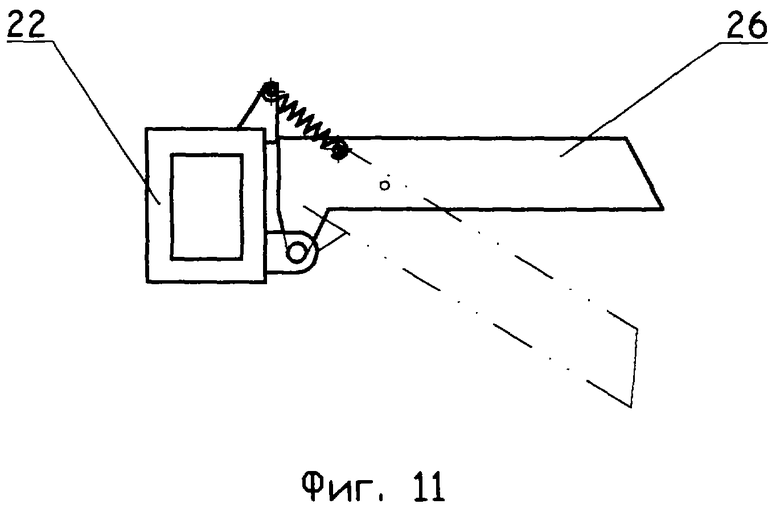
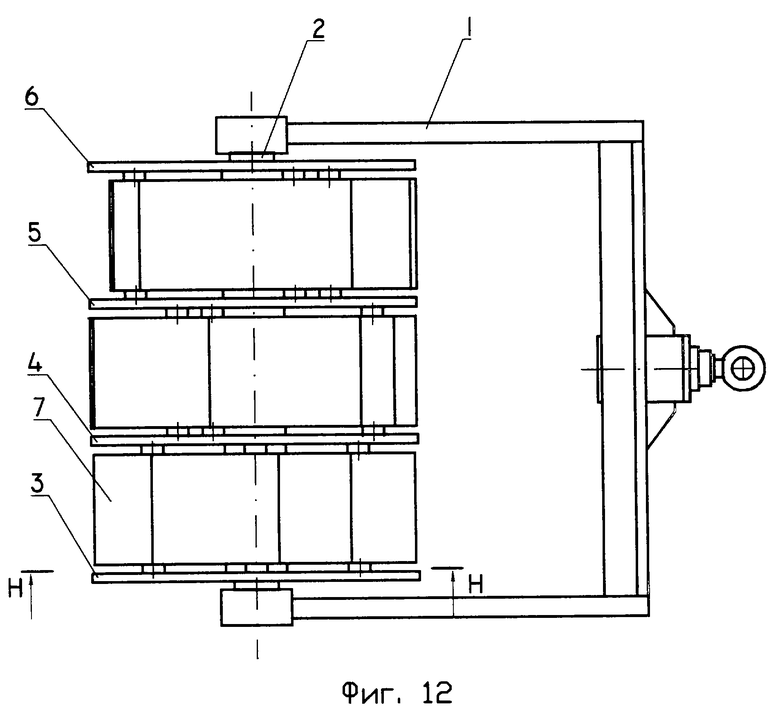
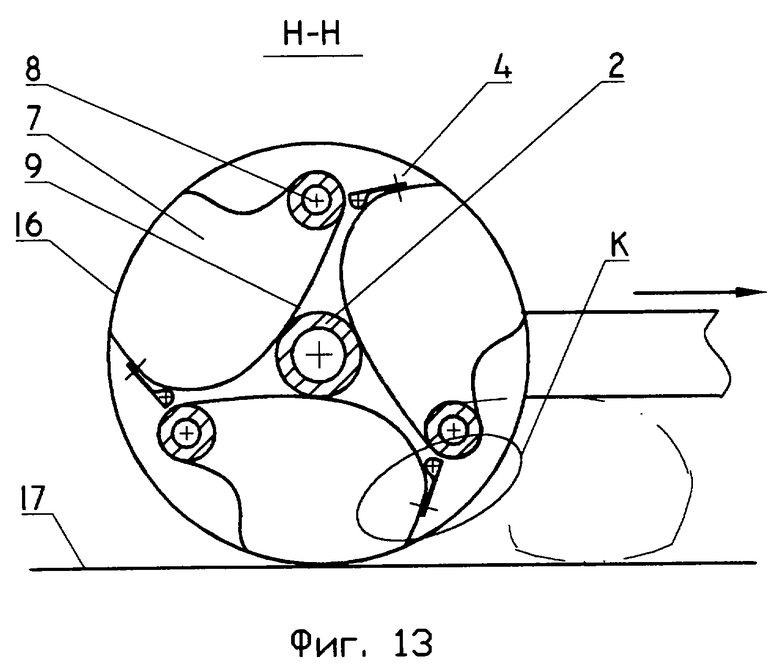
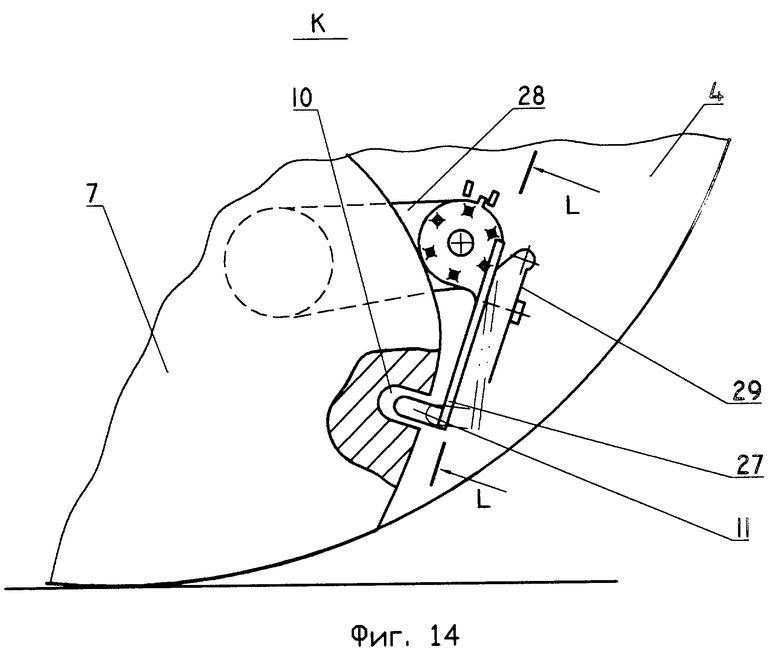
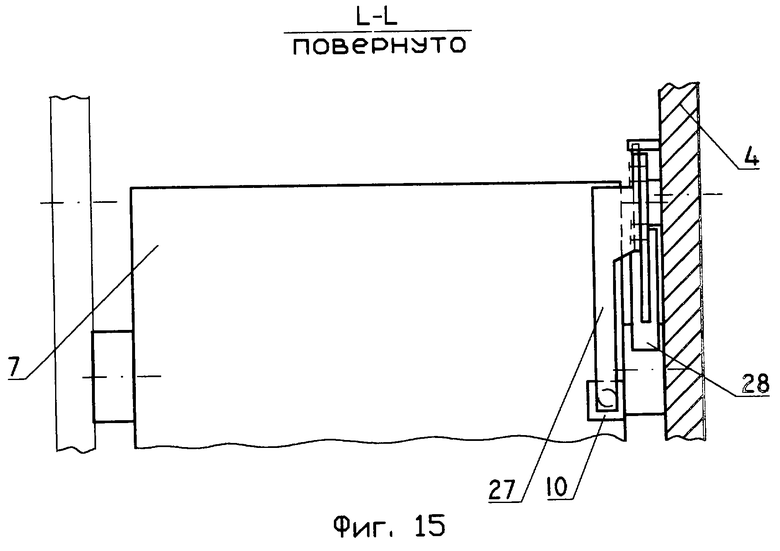
На фиг. 1 показан трамбующий каток в прицепном исполнении, вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел В на фиг. 2; на фиг. 4 - вид С на фиг. 3; на фиг. 5 - то же, что фиг. 3, с разнесенными звеньями механизма стопора; на фиг. 6 - то же, что фиг. 1, третий пример выполнения механизма стопора; на фиг. 7 - разрез D-D на фиг. 6; на фиг. 8 - вид Е на фиг. 6; на фиг. 9 - узел F на фиг. 7; на фиг. 10 - вид G на фиг. 9; на фиг. 11 - вариант установки упора; на фиг. 12 - трамбующий каток (в прицепном исполнении) по второму варианту изобретения, вид в плане; на фиг. 13 - разрез Н-Н на фиг. 12; на фиг. 14 - узел К на фиг. 13; на фиг. 15 - разрез L-L на фиг. 14; на графике фиг. 16 - результирующий момент на рычаге 27; на фиг. 17 - то же, что фиг. 16, при других характеристиках механизма.
Трамбующий каток содержит раму 1 с осью 2, закрепленные на этой оси диски 3-6 и размещенные в пространстве между дисками трамбующие элементы 7. В данном примере каток включает в себя первую, вторую и третью секции, образованные междисковыми пространствами между дисками 3-4, 4-5 и 5-6 соответственно, в каждой секции установлены три трамбующих элемента 7, и группы трамбующих элементов в смежных секциях размещены с взаимным угловым смещением. Трамбующий элемент 7 установлен с возможностью поворота на оси 8, удаленной от его центра тяжести и закрепленной на периферии соответствующей пары дисков. В исходном положении трамбующий элемент находится полностью в междисковом пространстве и его тыльная поверхность 9 может взаимодействовать с осью 2 как с упором, а конечному положению трамбующего элемента соответствует наибольшее удаление его центра тяжести от оси 2 катка. На трамбующих элементах 7 выполнен паз 10 для размещения стопорного пальца 11. На диске установлен механизм стопора, включающий плоскую пружину 12 со стопорным пальцем 11, толкатель 13 в корпусе 14 и двуплечий рычаг 15, взаимодействующий одним концом с плоской пружиной 12, а другим - с толкателем 13, являющимся входным звеном механизма. Идентичные механизмы стопора установлены для всех трамбующих элементов.
Каток приводится в движение тягачом (не показан) и при своем движении в рабочем направлении работает следующим образом.
Трамбующие элементы 7 при движении катка с рабочей скоростью поочередно выходят из междискового пространства под действием центробежной силы и ударяют своей рабочей поверхностью 16 по опорной поверхности 17, осуществляя уплотнение. Отключение стопора происходит, когда пята 18 толкателя взаимодействует с опорной поверхностью - толкатель 13 перемещается по направлению к оси катка и поворачивает двуплечий рычаг 15, который отжимает пружину 12, выводя стопорный палец 11 из паза 10; после прекращения этого взаимодействия пружина 12, рычаг 15 и толкатель 13 возвращаются в исходное положение, и стопор готов к автоматическому включению. Каждый трамбующий элемент 7 после удара по опорной поверхности постепенно возвращается из конечного положения в исходное, оставаясь во взаимодействии с опорной поверхностью. Когда трамбующий элемент оказывается полностью в междисковом пространстве, стопорный палец 11 входит в паз 10 под действием пружины 12, т.е. стопор включается. При дальнейшем движении катка в фазе, когда рабочая поверхность трамбующего элемента уже не взаимодействует с опорной поверхностью, стопор данного трамбующего элемента вначале выключается, а затем, когда прекратится взаимодействие пяты 18 с опорной поверхностью 17, стопор будет вновь готов к автоматическому включению.
После выключения стопора трамбующий элемент выходит из междискового пространства вне зависимости от величины центробежной силы (центр тяжести трамбующего элемента в этом положении смещен относительно его шарнира в сторону оси катка). При дальнейшем движении катка положение трамбующего элемента определяется совместным действием силы тяжести и центробежной силы: при движении катка с рабочей скоростью трамбующий элемент удерживается центробежной силой вне габаритов дисков, а после удара по опорной поверхности он возвращается в исходное положение, при этом стопор вновь автоматически включается и далее рабочий цикл повторяется; при движении катка с меньшей скоростью, при которой величина центробежной силы недостаточна для преодоления силы тяжести (например, при маневрировании), трамбующий элемент возвращается полностью в междисковое пространство, стопор автоматически включается и удерживает трамбующий элемент от падения на опорную поверхность.
В примере, показанном на фиг. 5, толкатель 13 отнесен от трамбующего элемента 7 против рабочего направления вращения диска 4, на диске установлены двуплечие рычаги 19 и 20, соединенные тягой 21 и взаимодействующие своими свободными концами с плоской пружиной 12 и толкателем 13 соответственно. В данном примере выключение стопора происходит в более поздней фазе, и такое выполнение механизма соответствует большей величине рабочей скорости. Кроме того, может быть выбрано такое положение толкателя 13 на диске 4, что при движении катка с небольшой скоростью в направлении, противоположном рабочему, трамбующий элемент при выключении стопора останется в исходном положении под действием силы тяжести до момента возврата стопора во включенное положение, что позволит катку маневрировать задним ходом.
В третьем примере выполнения механизма стопора, показанном на фиг. 6-10, на раме катка закреплена балка 22 с тремя (по числу секций катка) упорами 23, а для каждого трамбующего элемента на диске - плоская пружина 12 со стопорным пальцем 11, двуплечий рычаг 24, взаимодействующий первым концом с пружиной 12, и ограничитель 25 поворота рычага 24. Упор 23 установлен на траектории, описываемой при движении катка вторым концом рычага 24. Рычаг 24 при взаимодействии его второго конца с упором 23 (см. фиг. 9) поворачивается против часовой стрелки и отжимает пружину 12, выводя стопорный палец из паза 10, после прекращения этого взаимодействия пружина 12 и рычаг 24 возвращаются в исходное положение, в результате чего стопор готов к автоматическому включению.
На фиг. 11 показан вариант шарнирного соединения с балкой 22 подпружиненного упора 26. При движении катка в рабочем направлении упор 26 взаимодействует с рычагом 24 так же, как в предыдущем примере, а при движении катка задним ходом упор 26 отклоняется под воздействием второго конца рычага 24 и не препятствует движению. Такое выполнение упора позволяет катку маневрировать задним ходом. Тот же результат может быть достигнут при неподвижном упоре 23, если рычаг 24 установлен с возможностью поворота по часовой стрелке и подпружинен в обратном направлении.
Таким образом, выполнение стопоров с автоматическим включением, оснащение механизмом их выключения и выполнение этого механизма с возможностью выключения стопора, когда соответствующий трамбующий элемент находится в заданном положении, обеспечивают достижение технического результата - стопорение трамбующих элементов в габаритах дисков без вмешательства оператора в режиме маневрирования и тем самым облегчение условий маневрирования.
На фиг. 12-15 показан трамбующий каток, содержащий раму 1 с осью 2, закрепленные на этой оси диски 3-6 и размещенные в пространстве между дисками трамбующие элементы 7. В данном примере каток включает в себя первую, вторую и третью секции, образованные междисковыми пространствами между дисками 3-4, 4-5 и 5-6 соответственно, в каждой секции установлены три трамбующих элемента 7, и группы трамбующих элементов в смежных секциях размещены с взаимным угловым смещением. Трамбующий элемент 7 установлен с возможностью поворота на оси 8, удаленной от его центра тяжести и закрепленной на периферии соответствующей пары дисков. В исходном положении трамбующий элемент находится полностью в междисковом пространстве и его тыльная поверхность 9 может взаимодействовать с осью 2 как с упором, а конечному положению трамбующего элемента соответствует наибольшее удаление его центра тяжести от оси 2 катка. На трамбующих элементах 7 выполнен паз 10 для размещения стопорного пальца 11. Для каждого трамбующего элемента имеется механизм стопора, включающий шарнирно установленный на диске рычаг 27 со стопорным пальцем 11 и грузом 28 и пружину 29. Кинематическое звено, включающее рычаг 27, палец 11 и груз 28, является неуравновешенным. При этом действующая на неуравновешенное звено сила тяжести направлена на выключение стопора, когда трамбующий элемент находится под осью катка в междисковом пространстве, и на включение - когда трамбующий элемент находится над осью катка; вызванная неуравновешенностью этого звена центробежная сила всегда направлена на выключение стопора, а реакция пружины - на включение.
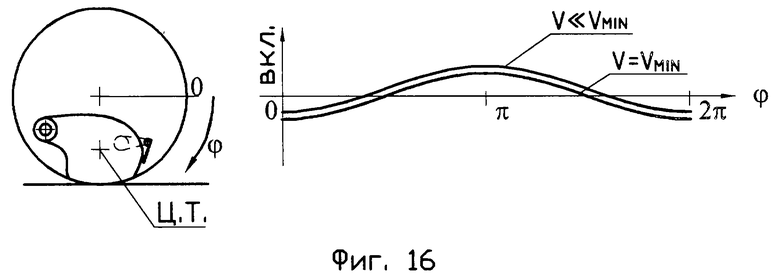
Положение груза 28 и жесткость пружины 29 выбраны так, что амплитудные значения действующих на рычаг 27 моментов реакции пружины, центробежной силы при минимальной рабочей скорости катка и силы тяжести находятся в соотношении 0,3:0,3:1,0, а результирующий момент при минимальной рабочей скорости направлен на выключение стопора, когда трамбующий элемент находится под осью катка в междисковом пространстве, и на включение - когда трамбующий элемент находится над осью катка. На графике фиг. 16 показана зависимость действующего на рычаг 27 результирующего момента (положительному направлению по оси ординат соответствует направление результирующего момента на включение стопора) от угла поворота диска с трамбующим элементом при двух значениях скорости:
V =Vmin
и V < Vmin,
где V - скорость катка;
Vmin - минимальная рабочая скорость катка.
Каток приводится в движение тягачом (не показан) и при своем движении в рабочем направлении работает следующим образом.
Трамбующие элементы 7 при движении катка с рабочей скоростью поочередно выходят из междискового пространства под действием центробежной силы и ударяют своей рабочей поверхностью 16 по опорной поверхности 17, осуществляя уплотнение. После удара по опорной поверхности трамбующий элемент вначале полностью входит в междисковое пространство под осью катка, оставаясь во взаимодействии с опорной поверхностью, при этом стопор не включается - результирующий момент сил, действующих на рычаг 27, направлен на выключение стопора. Затем трамбующий элемент постепенно выходит из междискового пространства вне зависимости от величины центробежной силы (центр тяжести трамбующего элемента в этом положении смещен относительно его шарнира в сторону оси катка), пока не прекратится его контакт с опорной поверхностью, после чего дальнейшее положение трамбующего элемента определяется совместным действием силы тяжести и центробежной силы. При движении катка с рабочей скоростью трамбующий элемент остается вне междискового пространства вплоть до удара по опорной поверхности, после чего цикл повторяется.
При движении со скоростью маневрирования, меньшей минимальной рабочей скорости, трамбующий элемент возвратится полностью в междисковое пространство к тому моменту, когда его центр тяжести окажется над осью катка, при этом стопор включится. В процессе движения катка после включения стопора действующий на рычаг 27 по направлению включения стопора результирующий момент постепенно уменьшается по величине, а затем (при угле около 1,5π на фиг. 16) изменяет направление на противоположное. Но одновременно происходит увеличение момента силы тяжести, действующего на трамбующий элемент 7 по направлению к выходу последнего из междискового пространства, и, следовательно, увеличение силы трения в паре "паз 10 - палец 11", препятствующей отключению стопора даже при малой величине скорости. Далее трамбующий элемент 7, оставаясь в междисковом пространстве, входит во взаимодействие с опорной поверхностью, сила трения в паре "паз 10 - палец 11" резко уменьшается или (при наличии в паре гарантированных зазоров) становится равной нулю, и стопор выключается.
Таким образом, при движении со скоростью маневрирования стопор удерживает трамбующий элемент от падения на опорную поверхность, а при движении с минимальной рабочей скоростью стопор не препятствует работе катка.
Перестановкой груза 28 относительно рычага 27 можно сместить кривую результирующего момента на графике фиг. 16 вдоль оси абсцисс, а выбирая жесткость пружины 29 - вдоль оси ординат. При перестановке груза 28 также изменяется соотношение момента центробежной силы и момента силы тяжести.
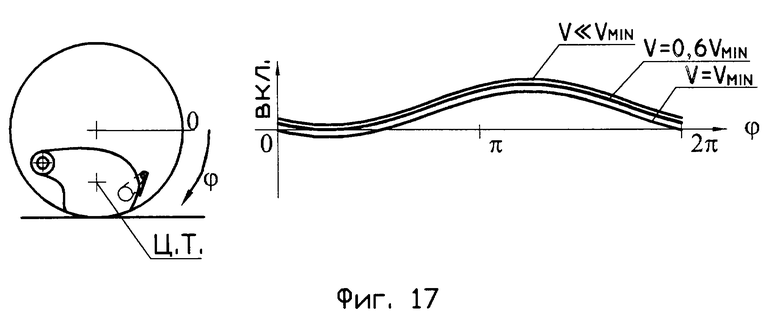
На графике фиг. 17 показана зависимость действующего на рычаг 27 результирующего момента, когда положение груза 28 (схематически показанное в левой части фиг. 17) и жесткость пружины 29 выбраны так, что результирующий момент сдвинут по фазе на угол около π/4, а амплитудные значения действующих на рычаг 27 моментов реакции пружины, центробежной силы при минимальной рабочей скорости катка и силы тяжести находятся в соотношении 1,2:0,5:1,0. Такое выполнение механизма обеспечивает возможность маневрирования задним ходом при скорости, меньшей 60% минимальной рабочей скорости катка, т.к. при такой скорости стопор постоянно включен.
Необходимость в установке отдельного груза 28 определяется требуемыми характеристиками механизма, и в отдельных случаях реализации изобретения груз 28 может отсутствовать, т.к. рычаг 27 со стопорным пальцем 11 может служить неуравновешенным звеном без этого груза.
Неуравновешенное звено может быть также выполнено в виде кинематически связанного с рычагом 27 отдельного рычага с неуравновешенным грузом. Выбирая положение неуравновешенного звена, можно изменять соотношение действующих на это звено силы тяжести и центробежной силы при заданной скорости катка, а также фазу переключения стопора, а выбирая жесткость пружины - смещать результирующий момент в сторону включения или выключения стопора.
Таким образом, неуравновешенное звено, выполненное с возможностью выключения стопора, когда трамбующий элемент взаимодействует с опорной поверхностью при движении катка с рабочей скоростью, и включения - когда центр тяжести трамбующего элемента находится выше оси катка, обеспечивает достижение технического результата - стопорение трамбующих элементов в габаритах дисков без вмешательства оператора в режиме маневрирования и тем самым облегчение условий маневрирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАМБУЮЩИЙ КАТОК (ВАРИАНТЫ) | 2002 |
|
RU2213828C1 |
| ПЛУЖНОЕ ОБОРУДОВАНИЕ ДОРОЖНОЙ МАШИНЫ | 2003 |
|
RU2237128C1 |
| Складной тент для кузова транспортного средства | 1986 |
|
SU1384419A1 |
| ДОРОЖНОЕ БАРЬЕРНОЕ ОГРАЖДЕНИЕ | 2007 |
|
RU2354775C2 |
| Механизм подвески отвала на хребтовой балке планировочной машины | 1988 |
|
SU1654468A1 |
| Механизм фиксации тяговой рамы грейдера | 1986 |
|
SU1447993A1 |
| Полуприцепной грейдер | 1986 |
|
SU1444478A1 |
| Устройство для разгрузки сыпучих грузов из кузова транспортного средства | 1986 |
|
SU1369943A1 |
| Бульдозерное оборудование | 1988 |
|
SU1652455A1 |
| Бульдозер с поворотным отвалом | 1987 |
|
SU1565973A1 |
Изобретение относится к области строительства, а именно к машинам для уплотнения грунта. Трамбующий каток содержит раму, закрепленные на оси диски и размещенные в пространстве между дисками трамбующие элементы. Стопор каждого трамбующего элемента оснащен механизмом, выключающим стопор в заданном положении, и имеет возможность включения. Входное звено механизма взаимодействует при движении катка с опорной поверхностью или рамой катка. В другом варианте изобретения механизм стопора содержит неуравновешенное звено, выполненное с возможностью выключения стопора, когда трамбующий элемент находится во взаимодействии с опорной поверхностью под осью катка, и включения - когда элемент находится над осью катка. Технический результат - облегчение условий маневрирования катка. 2 с. и 2 з.п. ф-лы, 17 ил.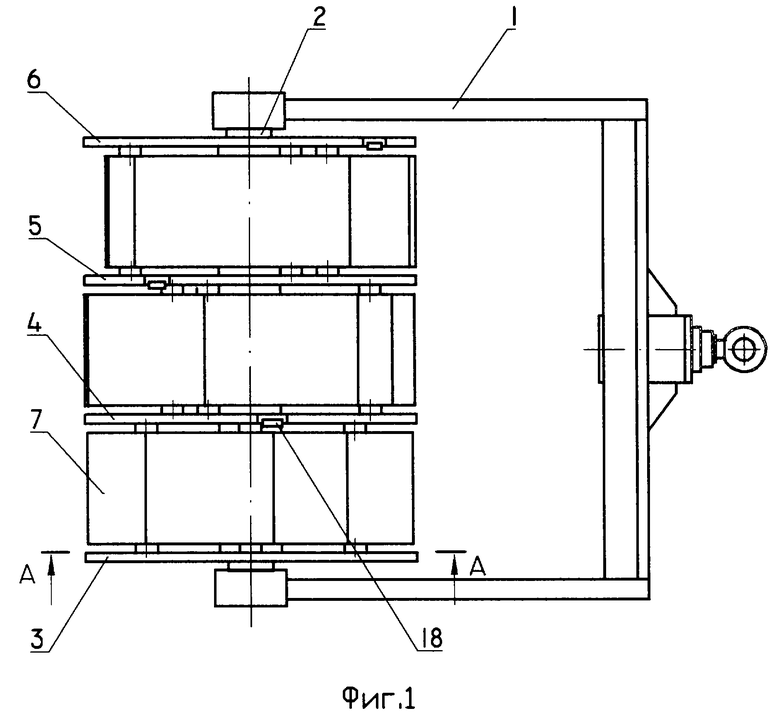
| US 4334799 A, 15.06.1982 | |||
| ПАРУСНЫЙ ТАКЕЛАЖ, ПРЕВРАЩАЕМЫЙ В ВЕТРЯНЫЕ ДВИГАТЕЛИ | 1927 |
|
SU16539A1 |
| Способ изготовления ячеистого листа из полимерного материала | 1980 |
|
SU1033353A1 |
| Устройство для уплотнения грунтов | 1975 |
|
SU791821A1 |

