Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая гироскоп инерциальный (ГИ), рулевой привод (РП) и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через элемент НЕ с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен со входом второго усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены с входами третьего и четвертого усилителей мощности соответственно, выходы усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры.
Существенным недостатком данной системы является то, что за счет одновременной подачи компенсации силы тяжести на головку самонаведения и в автопилот на снаряд в течение каждого периода на частоте вращения снаряда по крену действует суммарная средняя перегрузка, которая складывается от действия команды компенсации силы тяжести с ламельного датчика гироскопа инерциального и действия команды перекомпенсации силы тяжести с головки самонаведения (ГСН) за счет ее принудительного разворота (под действием сигнала по входу "Компенсация" ГСН). Вследствие релейности действия формируемой на частоте вращения снаряда перегрузки в течение одного полупериода и нуля в течение другого полупериода вращения снаряда, при небольших частотах вращения снаряда 3-4 Гц, когда собственная частота снаряда 1,7-2,5 Гц близка к частоте его вращения, происходит подчеркивание колебаний снаряда и увеличение его амплитуды колебаний в 1,3-1,5 раза, что снижает точность наведения и, кроме того, может привести к раскачиванию снаряда и, как следствие этого, к потере цели головкой самонаведения.
Задачей настоящего изобретения является устранение указанного недостатка. Это достигается тем, что сигнал с датчика инерциального гироскопа подают в ГСН в течение первой половины периода вращения снаряда, а сигнал в РП - в течение второй половины вращения на протяжении всего участка самонаведения. При этом на снаряд действует усредненная перегрузка, практически равномерно распределенная на каждом периоде вращения снаряда, что приводит к уменьшению в 1,3-1,5 раза амплитуды колебаний снаряда при отработке команд и повышению точности наведения.
Для этого в системе наведения, содержащей гироскоп инерциальный, усилители мощности, рулевой привод и головку самонаведения, выход "Захват" которой соединен с первым входом элемента И, выход которого соединен со входом "Компенсация" ГСН, выходы "+Z" и "-Z" которой соединены соответственно со входами третьего и четвертого усилителей мощности, первый элемент ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, второй элемент ИЛИ, элемент НЕ, при этом выходы усилителей мощности соединены с первыми входами соответствующих обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры, вход элемента НЕ соединен с выходом элемента И, а выход - со вторым входом второго элемента ИЛИ, первый вход которого соединен с выходом "+У" ГСН, его выход соединен со входом первого усилителя мощности, а выход "-У" ГСН соединен со входом второго усилителя мощности, первый вход первого элемента ИЛИ соединен со вторым выходом гироскопа инерциального, а выход первого элемента ИЛИ соединен со вторым входом элемента И.
На чертеже приведена блок-схема предлагаемой системы, где:
1 - головка самонаведения, выполненная, например, как в прототипе, 2 - гироскоп инерциальный с ламельным датчиком, выполненный, например, как в прототипе, 3 - рулевой привод, 4 - первый элемент ИЛИ, 5 - элемент И, 6 - элемент НЕ, 7 - второй элемент ИЛИ, 8, 9, 10, 11 - первый, второй, третий и четвертый усилители мощности, 12, 13, 14, 15 - обмотки управления автопилота.
Работает система наведения следующим образом.
Производится выстрел, и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват", который, поступая на первый вход элемента И, разрешает проход импульсов с первого и второго выхода ГИ на вход "Компенсация "ГСН.
При вращении снаряда на первом и втором выходах гироскопа вырабатываются импульсы, суммарная длительность которых приблизительно равна половине периода вращения снаряда.
Под действием этого сигнала ось ГСН будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
J=f(eц-ео),
где f - функция, определяемая пеленгационной характеристикой ГСН; ец - угловая скорость линии "снаряд-цель"; ео - угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам "+У", "-У", "+Z", "-Z").
При этом под действием сигнала "Компенсация" и сигнала рассогласования ГСН на ее выходе "-У" формируется суммарный сигнал, который поступает на вход второго усилителя 9, а с выхода его на первый вход обмотки управления 13. Под действием этого сигнала происходят отклонение рулей, отработка рассогласования ГСН и компенсация веса снаряда в течение первого полупериода вращения снаряда. С выхода "+У" ГСН сигнал поступает на первый вход второй схемы ИЛИ 7, на второй вход которой через инвертор 6 поступает сигнал с выхода схемы И 5 от ламельного датчика гироскопа инерциального. С выхода второй схемы ИЛИ 7 суммарный сигнал поступает на вход первого усилителя мощности 8, а с его выхода на вход обмотки управления 12. Под действием этого сигнала происходят отклонение рулей, отработка рассогласования ГСН и компенсация веса снаряда во второй полупериод вращения снаряда. С выходов "+Z" и "-Z" сигналы поступают на входы 3-го и 4-го усилителей мощности, а с их выходов на первые входы обмоток управления 14 и 15. Под действием этих сигналов происходят отклонение рулей и отработка рассогласования в горизонтальном канале.
Таким образом, за счет разнесения во времени в течение одного оборота подачи сигнала компенсации силы тяжести в автопилотный блок и ГСН усреднилась величина перегрузки, действующей на снаряд, что позволило уменьшить колебания снаряда и повысить точность наведения, а следовательно, и эффективность стрельбы.
Источник информации
1. "152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (Уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". Москва. Военное издательство. 1990 г., стр. 59-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Технический результат - повышение точности наведения. Технический результат достигается тем, что в системе наведения, содержащей гироскоп инерциальный, усилители мощности, рулевой привод и головку самонаведения (ГНС), выход "Захват" которой соединен с первым входом элемента И, выход которого соединен со входом "Компенсация" ГСН, выходы "+Z" и "-Z" которой соединены соответственно со входами третьего и четвертого усилителей мощности, введен первый элемент ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального. Система также содержит второй элемент ИЛИ, элемент НЕ, при этом выходы усилителей мощности соединены с первыми входами соответствующих обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры. Вход элемента НЕ соединен с выходом элемента И, а выход - со вторым входом второго элемента ИЛИ, первый вход которого соединен с выходом "+У" ГСН, его выход соединен со входом первого усилителя мощности, а выход "-У" ГСН соединен со входом второго усилителя мощности, первый вход первого элемента ИЛИ соединен со вторым выходом гироскопа инерциального, а выход первого элемента ИЛИ соединен со вторым входом элемента И. 1 ил.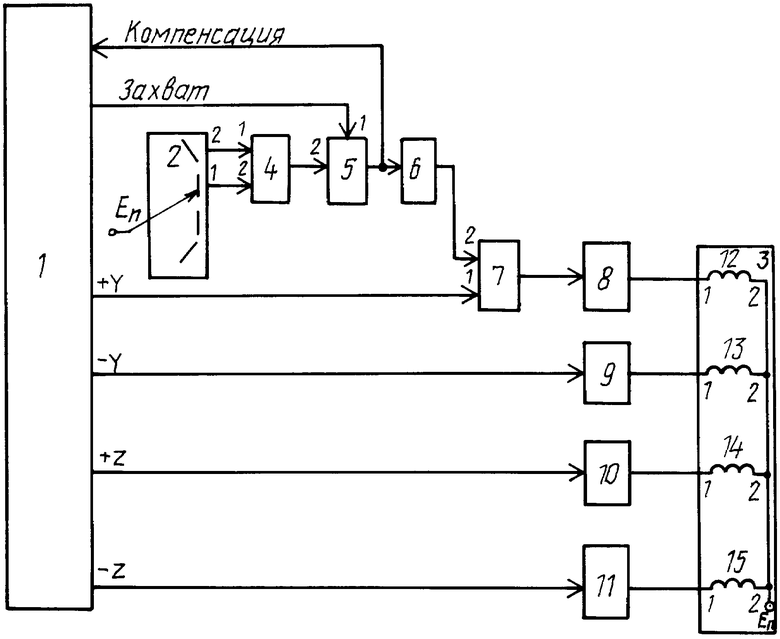
Система наведения управляемого снаряда, содержащая гироскоп инерциальный, усилители мощности, рулевой привод и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом элемента И, выход которого соединен со входом "Компенсация" ГСН, выходы "+Z" и "-Z" которой соединены соответственно со входами третьего и четвертого усилителей мощности, первый элемент ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, второй элемент ИЛИ, элемент НЕ, при этом выходы усилителей мощности соединены с первыми входами соответствующих обмоток управления рулевого привода, вторые входы которых соединены со входом гироскопа инерциального и источником питания бортовой аппаратуры, отличающаяся тем, что вход элемента НЕ соединен с выходом элемента И, а выход - со вторым входом второго элемента ИЛИ, первый вход которого соединен с выходом "+У" ГСН, его выход соединен со входом первого усилителя мощности, а выход "-У" ГСН соединен со входом второго усилителя мощности, первый вход первого элемента ИЛИ соединен со вторым выходом гироскопа инерциального, а выход первого элемента ИЛИ соединен со вторым входом элемента И.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Военное издательство | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| US 5042742 А, 27.08.1991 | |||
| US 5248114 А, 29.09.1993. | |||
