Изобретение относится к диагностике железнодорожных путей и может быть использовано для автоматизации выправки плана и профиля железнодорожного пути при текущем их содержании.
В известном способе выправки (Л-1) железнодорожную кривую размечают вручную, через одинаковые интервалы, измеряют стрелы изгиба от хорд, или координаты оси пути в этих точках. Затем по той, или иной схеме вычисляют проектные данные и сдвижки пути в точках деления кривой. Величины сдвижек вводят в бортовой компьютер выправочной машины, которая и осуществляет выправку кривой в точках деления. При автоматизированной съемке стрел вагоном-путеизмерителем или путеизмерительной системой выправочных машин для достижения необходимой точности определения фактического положения пути требуется привязка системы координат, в которой работает машина, к трехмерной прямоугольной системе координат реперной сети. Для этих целей разработаны специализированные дорогостоящие и к сожалению малоэффективные оптико-электронные устройства (Л-2).
Наиболее близким по технической сущности является способ выправки железнодорожного пути, описанный в (Л-1). Он и взят за прототип.
Прототип не обеспечивает точную и эффективную выправку железнодорожного пути в плане и в профиле.
Технический результат заявляемого объекта выражается в повышении эффективности работы путевых машин и механизмов, предназначенных для выправки пути.
Сущность заявляемого изобретения состоит в том, что для выправки железнодорожного пути используют базу данных реперной системы, в которой вычислены координаты, отметки и пикетаж реперов с промерами расстояний и превышений до ближайшего рельса. По этим данным определяют координаты, отметки и пикетаж точек головки рельса, образующих точную цифровую модель рельса (ЦМР) в системе трехмерных прямоугольных координат реперной сети.
Далее программным путем образуют разреженную двумерную цифровую модель углов поворота трассы (ЦМУ) обследуемого участка пути. Эта разреженная эталонная модель строится по координатам, хранящимся в базе данных реперной системы путем решения обратных геодезических задач. Для этого вычисляют дирекционные углы хорд аi, и острые углы перекрывающихся треугольников еi,, еi+1. Затем определяют двумерный массив точных координат криволинейных полярных координат М вида: М=(ai, si), где si - пикетаж центральной точки i-го участка кривой (см. фиг.1).
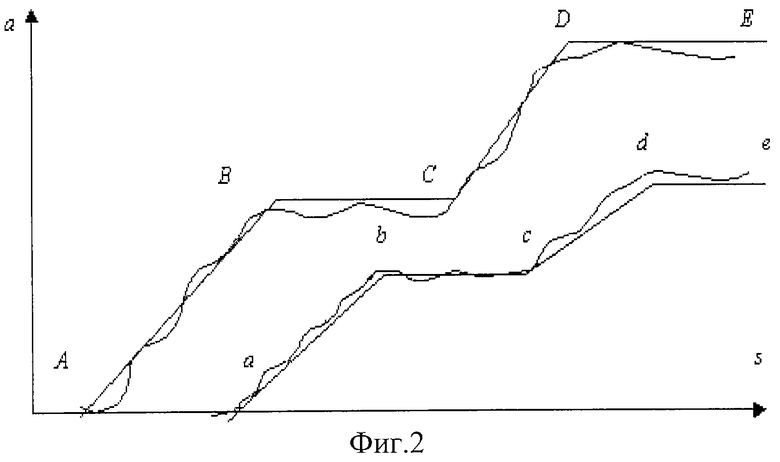
Массив М можно представить в виде графика функции a(s). См. фиг.2.
Затем по данным вагона-путеизмерителя или путеизмерительного устройства выправочной машины строят приближенно привязанную к пикетажу s передаточную функцию углов  , в которой углы поворота а
, в которой углы поворота а

где ƒi+1, ƒi - измеренные стрелы;
ds
ρ=206265″.
Наклонные (соответствующие круговым кривым) и горизонтальные (соответствующие прямым) участки графиков аппроксимируют прямыми линиями методом наименьших квадратов. Пересечения прямых образуют две ломанные конфигурации: точную (А В С D Е...) и приближенную (а в с д е...).
Далее путем двумерных аффинных преобразований А, переводят конфигурацию (а в с д е...) в точную конфигурацию (А В С Д Е...), что является ключевым моментом автоматизированной привязки координатной системы путеизмерительного вагона (машины). После этого координаты ai, si любой точки конфигурации (а в с д е...) пересчитываются в точные координаты а
где А - матрица аффиннного преобразования координат;
n - число точек конфигурации.
Таким образом, пикетаж путеизмерительного устройства приближенно, с точностью порядка 1 м, совмещают с пикетажем реперной сети. Элементы матрицы аффинных преобразований находят обобщенным методом наименьших квадратов по способу С.И.Матвеева, изложенному, например, в работе - Матвеев С.И. Цифровое трансформирование аэрокосмических снимков с измеренными координатами центров фотографирования /Труды МИИТа, вып.915, 1998, с. 29-31/.
Путеизмерителем выполнены непрерывные измерения расстояний по рельсовой нити и стрел ƒ при постоянной длине хорды d. Для обработки данных путеизмерителя принимают следующие исходные данные: координаты хнач, yнач некоторой начальной точки ЦМР и ее пикетаж sнач и дирекционный угол αнач предыдущего прямого участка.
Учитывают следующие соотношения. Изменение направления на длине хорды d равно

Длина кривой, опирающейся на хорду
σ=Rε.
Связь длины хорды с радиусом кривизны
d=2Rsin(ε/2).
Связь длины кривой с углом поворота
Производная направления от пикетажа

По результатам измерения стрел вычисляют дирекционные углы и координаты точек, которые по пикетажу соответствуют контрольным точкам ЦМР


Получим второй массив координат для контрольных точек ЦМР

Начальные значения координат контрольных точек ЦМР принимают исходными. При этом вычисляются невязки ƒx=x’-x, ƒy=y’-y, используемые при вычислении координат промежуточных точек.
Координаты промежуточных точек вычисляются по формулам (1)-(3) и исправляются поправками δx, δу, получаемыми интерполированием пропорционально расстоянию от предыдущей точки ЦМР между одноименными поправками к предыдущей и последующей контрольным точкам ЦМР.
Таким образом, получают высокоточную непрерывную цифровую (координатную) модель рельса, или оси плана пути в системе координат реперной сети с точностью 5-10 мм. Эта модель готова для автоматизированной выправки кривых при введении ее в бортовые компьютеры выправочных машин и механизмов, оснащенных программным обеспечением для выправки пути не по стрелам, а по координатам, что единственно позволяет приводить путь к проектному очертанию.
Источники информации, принятые во внимание при составлении заявки на изобретение:
1. Технические требования. Специальная реперная система контроля состояния железнодорожного пути в профиле и плане: Технические требования. - М.: МПС РФ, 1998, 29 с.
2. Попович М.В. Механизированная выправка железнодорожного пути. 2000, 125 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| СПОСОБ ТЕКУЩЕГО СОДЕРЖАНИЯ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2466235C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ ГЛОБАЛЬНОЙ СИСТЕМЫ ТРЁХМЕРНЫХ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2569487C1 |
| СПОСОБ АДАПТИВНОГО ФОРМИРОВАНИЯ ЕДИНОЙ СИСТЕМЫ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ РОССИИ ПО ГЛОБАЛЬНЫМ КООРДИНАТАМ В НОВОЙ ТРЕХМЕРНОЙ ПРЯМОУГОЛЬНОЙ СИСТЕМЕ КООРДИНАТ НЕПОСРЕДСТВЕННО НА ЭЛЛИПСОИДЕ | 2014 |
|
RU2580436C2 |
Изобретение относится к диагностике железнодорожных путей и может быть использовано для автоматизации выправки плана и профиля железнодорожного пути при текущем их содержании. Способ контроля состояния железнодорожного пути осуществляется путем координатной привязки показаний путеизмерительных устройств к реперной сети с использованием бортового компьютера, установленного на выправочной машине. На обследуемом участке железнодорожного пути привязку производят к системе координат реперной сети. Для этого используют базу данных реперной системы, в которую вводят вычислительные координаты, отметки и пикетаж реперов с промерами расстояний до ближайшего рельса. На основе этих данных программным путем строят цифровую модель углов поворота трассы обследуемого участка пути. Затем совмещают системы координат путеизмерительного устройства и реперной сети. Далее получают точную непрерывную координатную модель, по которой судят о состоянии железнодорожного пути для постановки в проектное или другое оптимальное положение. Технический результат состоит в повышении эффективности работы путевых машин и механизмов, предназначенных для выправки пути. 2 ил.
Способ контроля состояния железнодорожного пути, осуществляемый путем координатной привязки показаний путеизмерительных устройств к реперной сети с использованием бортового компьютера, установленного на выправочной машине, отличающийся тем, что на обследуемом участке железнодорожного пути привязку производят к системе координат реперной сети, используя базу данных реперной системы, в которую вводят вычисленные координаты, отметки и пикетаж реперов с промерами расстояний до ближайшего рельса, далее на основе этих данных программным путем строят цифровую модель углов поворота трассы обследуемого участка пути, затем совмещают системы координат путеизмерительного устройства и реперной сети, далее получают точную непрерывную координатную модель, по которой судят о состоянии железнодорожного пути для постановки в проектное или в другое оптимальное положение.
| Специальная реперная система контроля состояния железнодорожного пути в профиле и плане: Технические требования | |||
| –М.: МПС РФ, 1998, с.29 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ В КРУГОВЫХ КРИВЫХ | 1990 |
|
RU2030505C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ ДОРОЖНОГО ПОЛОТНА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЕМКИ | 2000 |
|
RU2165595C1 |
| СПОСОБ ОЦЕНКИ ДИСФУНКЦИИ ЯРКОСТНО-КОНТРАСТНЫХ КАНАЛОВ ЗРИТЕЛЬНОЙ СИСТЕМЫ | 1996 |
|
RU2127543C1 |

