Группа изобретений относится к вертолетостроению, в частности к системам управления шагом несущего винта и двигателем вертолета со спаренной системой управления.
Спаренной системой управления шагом несущего винта и двигателем, как правило, оснащены боевые вертолеты.
Известны системы управления боевых вертолетов, в которых органы управления оператора постоянно и жестко связаны с органами управления летчика. В этом случае органы управления оператора повторяют все движения органов управления летчика, что является большим неудобством для оператора. Как часть системы управления вертолетом известен выбранный в качестве прототипа узел объединенного управления шагом несущего винта и двигателем со спаренной системой управления, содержащий первый и второй рычаги управления шагом несущего винта, снабженные, соответственно, первой и второй рукоятками коррекции оборотов двигателя (называемые обычно, «рычаги «шаг-газ»), механическую проводку синхронизации рукояток коррекции оборотов двигателя, включающую тяги и качалки, элемент связи первой рукоятки коррекции оборотов двигателя с топливным регулятором двигателя вертолета (Соловьев И.И., Велик В.А., Тетерин И.В. Конструкция вертолета МИ-8. М.:Издательство Транспорт, 1970 г., с. 198-204). Управление общим шагом несущего винта осуществляется перемещением кинематически связанных между собой рычагов «шаг-газ», один из которых связан с ползуном автомата перекоса.
Под термином «коррекция оборотов» обычно понимается «коррекция частоты вращения двигателя» и первый из упомянутых терминов используется при описании настоящего изобретения исключительно для краткости.
Недостатком известного узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления является жесткая кинематическая связь между первой и второй рукоятками коррекции оборотов двигателя, являющимися, соответственно, рукоятками коррекции оборотов летчика и оператора.
Кроме этого, известны системы управления боевых вертолетов (патент на изобретение №2527574), в которых органы управления оператора находятся в походном (отключенном) положении при нормальном полете и могут, в случае необходимости, подключаться к системе управления полетом. В штатных ситуациях управление вертолетом осуществляет летчик с помощью находящихся на его рабочем месте органов управления, связанных посредством проводки (например, механической) с объектами управления. В нештатной ситуации, когда летчик по какой-то причине утрачивает способность управления вертолетом, у оператора должна быть возможность взять управление вертолетом на себя. С этой целью, между органами управления летчика и оператора устанавливаются специальные устройства, которые в штатной ситуации разъединяют органы управления оператора и летчика, при этом органы управления оператора находятся в походном положении и неподвижны, тем самым не мешают оператору вести боевые действия, а в нештатной ситуации позволяют оператору взять управление на себя. В случае использования рычагов «шаг-газ», недостатком является тот факт, что при переводе рычага «шаг-газ» оператора в походное положение уменьшается рабочий ход рукоятки коррекции оборотов двигателя на рычаге «шаг-газ» летчика. Этим подтверждается актуальность решаемой группой изобретений задачи.
Известна управляемая зубчатая муфта сцепления, содержащая снабженную механизмом управления неуправляемую зубчатую полумуфту и управляемую зубчатую полумуфту, которая выполнена подвижной в осевом направлении (А.С. СССР №87516, кл. F16D 11/10, оп. 12.11.1949 г.).
Однако известная муфта не может быть использована в узле объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, поскольку не обладает конструктивными элементами, позволяющими встроить ее непосредственно в механическую проводку синхронизации рукояток коррекции оборотов двигателя вертолета. Кроме того, в момент сцепления полумуфт в известной муфте они находятся в произвольном угловом положении друг относительно друга, что не дает возможности использовать известную муфту в механической проводке синхронизации рукояток коррекции оборотов двигателя летчика и оператора, поскольку в момент сцепления указанные рукоятки должны устанавливаться в одинаковое положение, т.е. управление коррекцией оборотов со стороны летчика и со стороны оператора должно синхронизироваться.
Заявитель не обнаружил в уровне техники аналогов управляемой муфты сцепления, предназначенной непосредственно для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления.
Группа изобретений решает задачу создания такого узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, в котором в одном диапазоне положений второго рычага «шаг-газ» (как правило, являющегося рычагом «шаг-газ» оператора вертолета) его рукоятка коррекции оборотов двигателя сообщена с механической проводкой синхронизации рукояток коррекции оборотов двигателя, а в другом диапазоне положений указанного рычага «шаг-газ» его рукоятка коррекции оборотов двигателя разобщена с механической проводкой синхронизации рукояток коррекции оборотов двигателя.
Технический результат, достигаемый узлом объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, заключается в обеспечении возможности подключения рукоятки коррекции оборотов двигателя к механической проводке синхронизации рукояток коррекции оборотов двигателя или отключения указанной рукоятки в зависимости от положения рычага управления шагом несущего винта оператора.
Указанный технический результат, относящийся к узлу объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления достигается тем, что в узле объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, содержащем первый и второй рычаги управления шагом несущего винта, снабженные, соответственно, первой и второй рукоятками коррекции оборотов двигателя, механическую проводку синхронизации рукояток коррекции оборотов двигателя, включающую тяги и качалки, элемент связи первой рукоятки коррекции оборотов двигателя с топливным регулятором двигателя, в упомянутую механическую проводку синхронизации рукояток коррекции оборотов двигателя встроена управляемая муфта сцепления, вход управления которой связан со вторым рычагом управления шагом несущего винта.
Технический результат, достигаемый управляемой муфтой сцепления, заключается в обеспечении возможности самоустановки ее частей, передающих крутящий момент, в заданное друг относительно друга угловое положение.
Указанный технический результат, относящийся к управляемой муфте сцепления для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, достигается тем, что указанная управляемая муфта сцепления, содержит снабженную механизмом управления управляемую полумуфту и неуправляемую полумуфту, которые обладают возможностью взаимного контактирования друг с другом геометрически подобными друг другу торцевыми поверхностями наклонных срезов их цилиндрических корпусов, установленных соосно с возможностью вращения вокруг своей оси, при этом цилиндрический корпус управляемой полумуфты выполнен подвижным в осевом направлении, механизм управления включает связанные между собой качалку, присоединительный элемент которой является входом управления муфты, и колесо, снабженное штифтом, обладающим возможностью взаимодействия с выемкой рычага, связанного с передаточным звеном, присоединенным к корпусу управляемой полумуфты, который снабжен элементом связи со вторым рычагом управления шагом несущего винта, корпус неуправляемой полумуфты снабжен элементом связи с механической проводкой синхронизации рукояток коррекции оборотов двигателя. Корпус управляемой полумуфты и элемент ее связи со вторым рычагом управления шагом несущего винта могут быть конструктивно объединены и выполнены в виде качалки. Механическая проводка синхронизации рукояток коррекции оборотов двигателя может быть выполнена канатной, а элемент связи с ней неуправляемой полумуфты выполнен в виде шкива, конструктивно объединенного с корпусом неуправляемой полумуфты. В описанных частных формах выполнения управляемой муфты сцепления для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления наклонный срез цилиндрического корпуса каждой полумуфты может быть выполнен таким образом, что развертка на плоскость этой цилиндрической поверхности содержит двухзвенную ломаную, меньший из углов при вершине которой составляет 17-29 угловых градусов, а длина звеньев отличается не более чем на 5%.
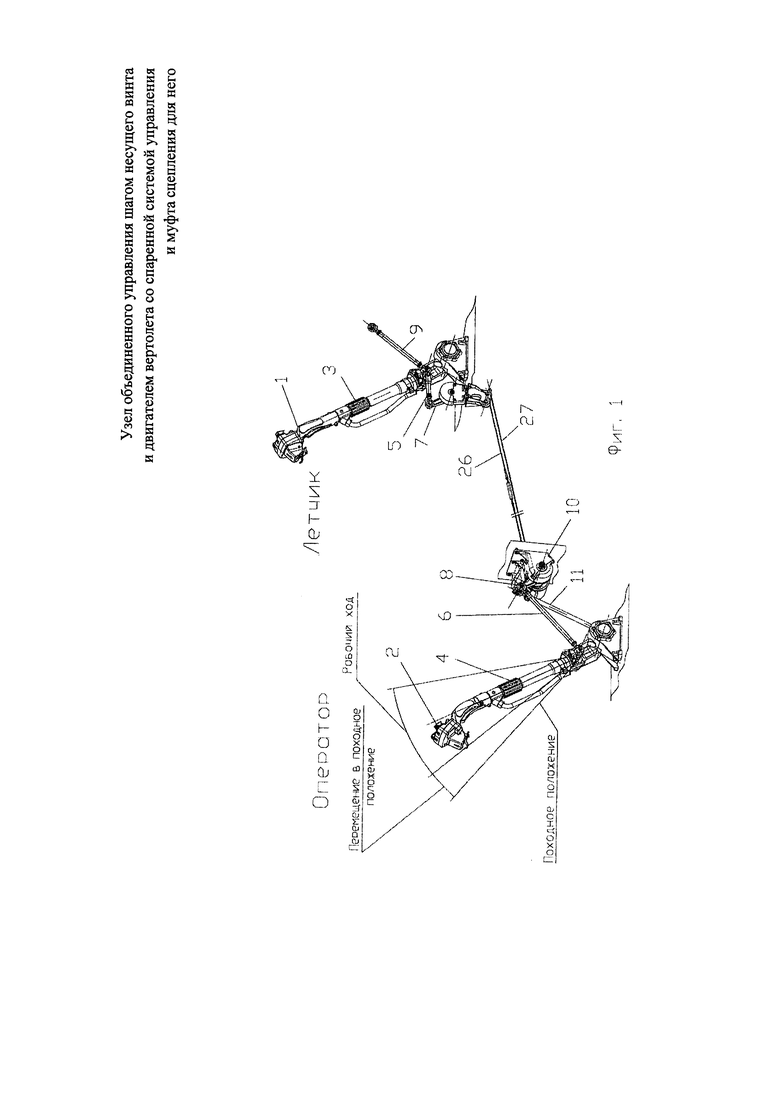
На фиг. 1 показан общий вид узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, выполненного в соответствии с настоящим изобретением.
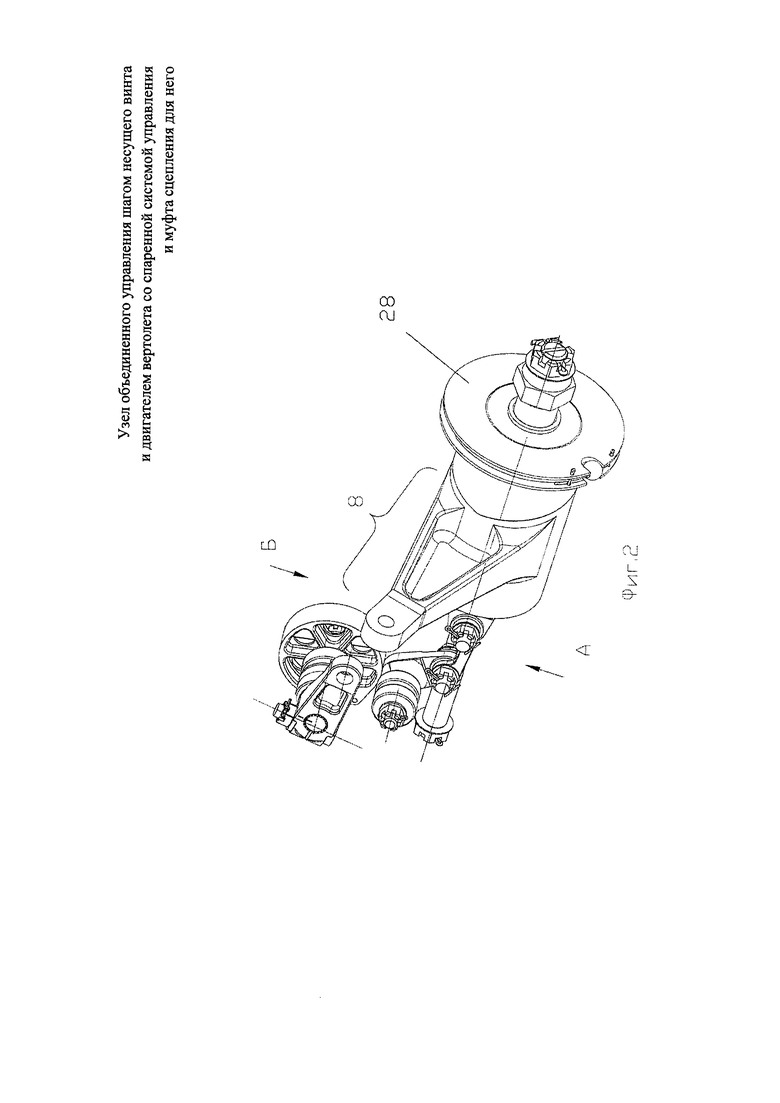
На фиг. 2 показана управляемая муфта сцепления для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления.
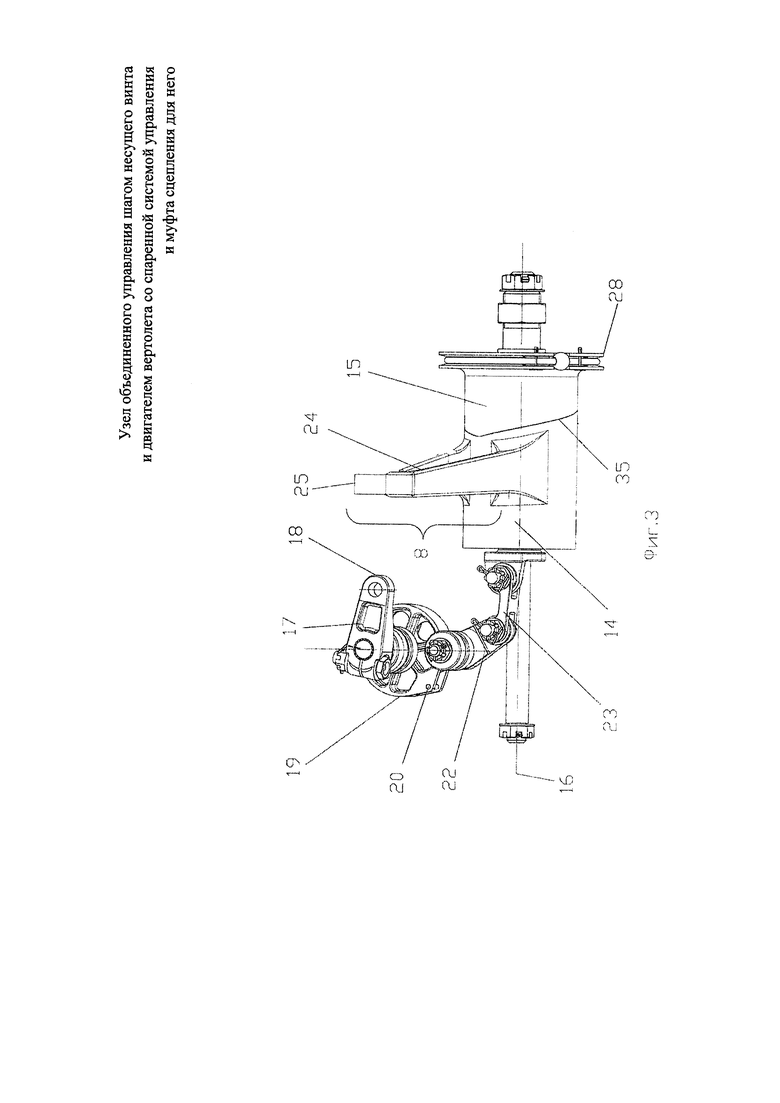
На фиг. 3 показан вид по стрелке А на фигуре 2.
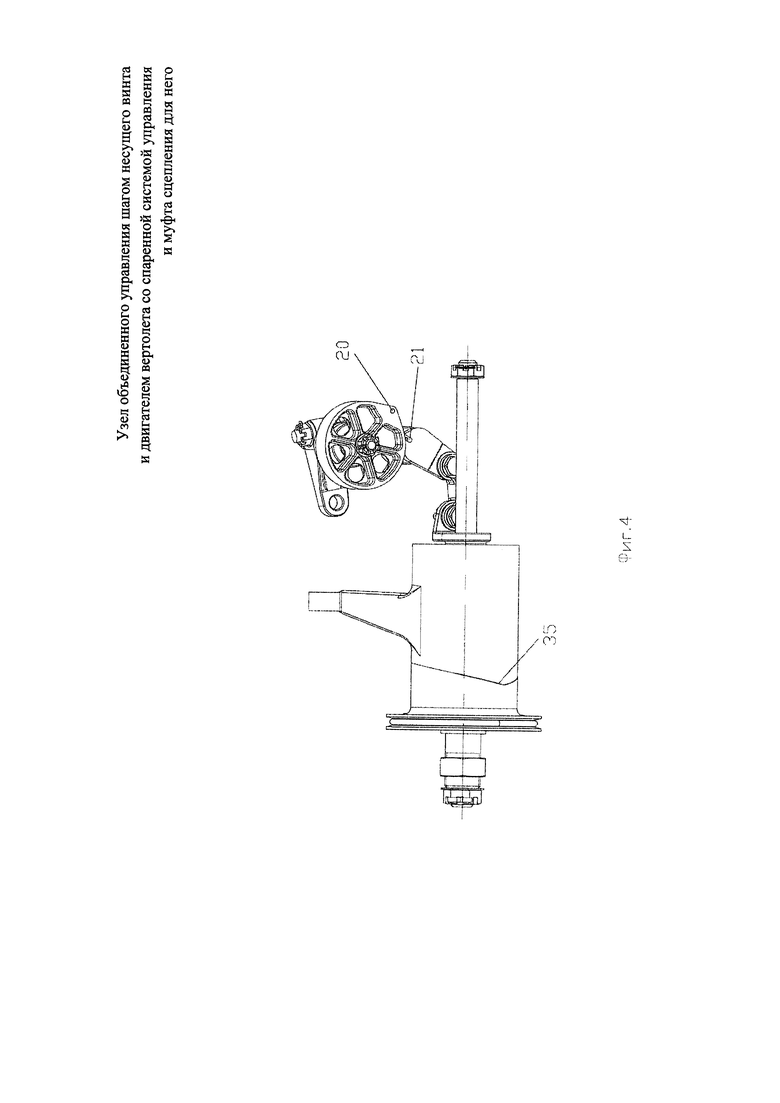
На фиг. 4 показан вид по стрелке Б на фигуре 2.
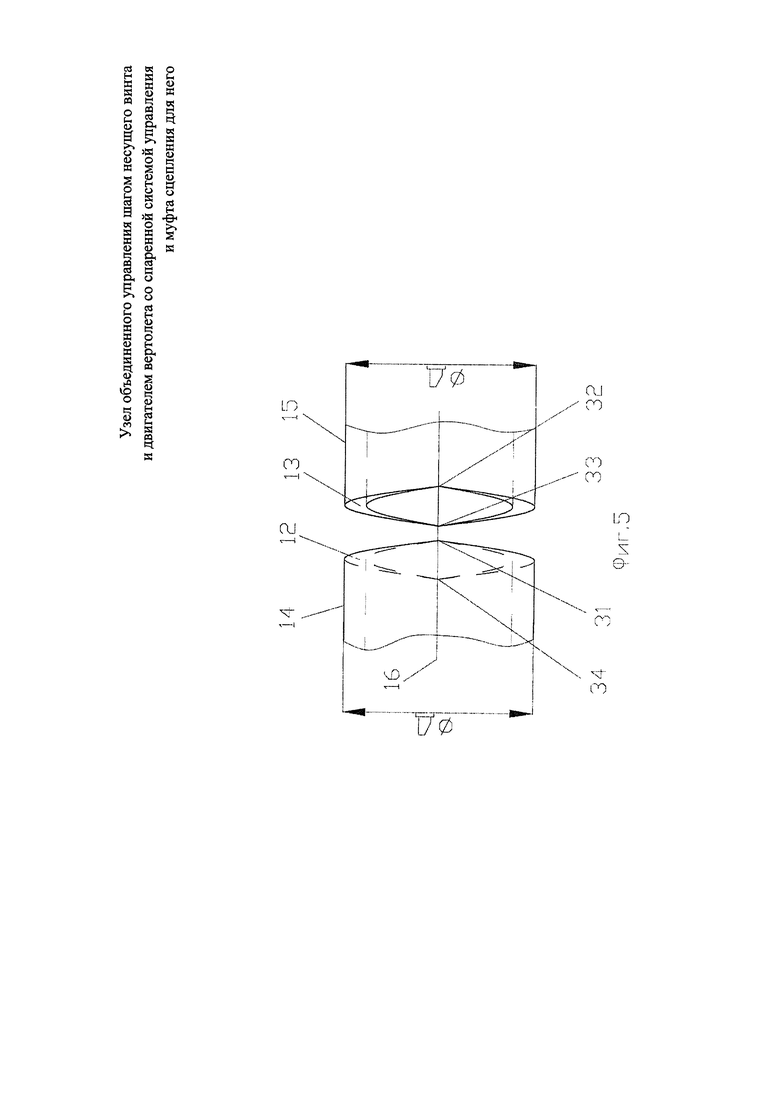
На фиг. 5 показаны фрагменты управляемой муфты сцепления в выключенном состоянии.
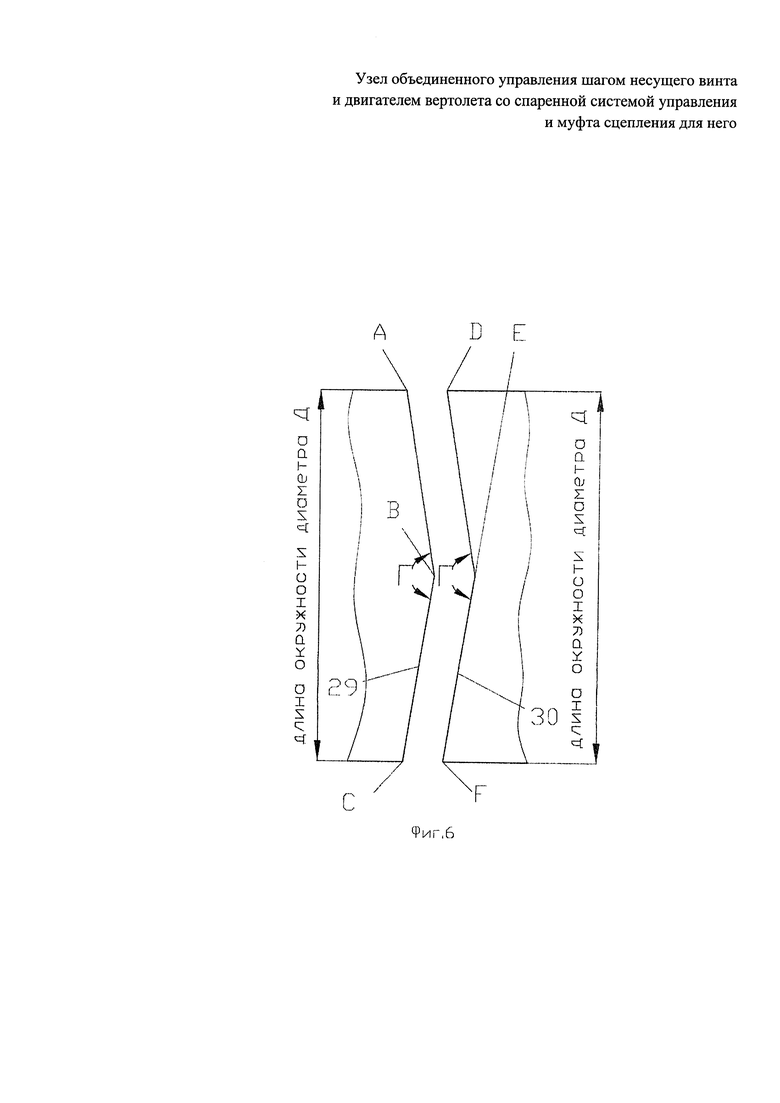
На фиг. 6 показаны фрагменты разверток цилиндрических поверхностей корпусов полумуфт, входящих в состав управляемой муфты сцепления.
Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления (фиг. 1) содержит первый 1 и второй 2 рычаги управления шагом несущего винта (первый и второй рычаги «шаг-газ»), снабженные, соответственно, первой 3 и второй 4 рукоятками коррекции оборотов двигателя (не показан), механическую проводку синхронизации рукояток коррекции оборотов двигателя, включающую тяги 5 и 6, а также качалки 7 и 8. Элементы связи (постоянной или подключаемой в зависимости от положения второго 2 рычага «шаг-газ») первого 1 и второго 2 рычагов управления шагом несущего винта, а также их связь с ползуном автомата перекоса не являются предметом настоящего изобретения и потому не описываются и на чертежах не показаны.
Элемент 9 связи первой рукоятки 3 коррекции оборотов двигателя с топливным регулятором двигателя (топливный регулятор двигателя не показан) представляет собой, в частности, механическую тягу. В механическую проводку синхронизации рукояток 3 и 4 коррекции оборотов встроена управляемая муфта 10 сцепления, вход управления которой связан со вторым рычагом 2 управления шагом несущего винта тягой 11 (фиг. 1).
Управляемая муфта 10 сцепления для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления содержит снабженную механизмом управления управляемую и неуправляемую полумуфты. Полумуфты обладают возможностью взаимного контактирования друг с другом геометрически подобными друг другу торцевыми поверхностями 12 и 13 наклонных срезов их цилиндрических корпусов 14 и 15, установленных соосно с возможностью вращения каждого вокруг своей оси, лежащей на общей оси 16 (фиг. 3, 5).
Под наклонным срезом цилиндрического корпуса полумуфты понимается срез корпуса (как результат сечения этого корпуса), выполненный плоскостью или криволинейной поверхностью, аппроксимируемой с заданной (например, на основе известного метода «наименьших квадратов») точностью плоскостью, неперпендикулярной и непараллельной оси 16.
Цилиндрический корпус 14 управляемой полумуфты выполнен подвижным в осевом направлении. По указанным признакам управляемая муфта 10 сцепления может быть отнесена к фрикционным торцевым муфтам - см. ГОСТ Р 50371-92 «Муфты механические общемашиностроительного применения», М., Издательство стандартов, 1993 г. Цилиндрические корпуса 14 и 15 выполняют, преимущественно, пустотелыми, с целью уменьшения их массы. Механизм управления муфтой 10 сцепления включает кинематически связанные между собой качалку 17, присоединительный элемент 18 которой (представляющий собой, например, ушко) является входом управления муфты 10 сцепления, и колесо 19, снабженное штифтом 20, обладающим возможностью взаимодействия с выемкой 21 (фиг. 4) рычага 22, связанного с передаточным звеном 23, присоединенным к корпусу 14 управляемой полумуфты.
Элемент связи управляемой муфты 10 сцепления со вторым рычагом 2 управления шагом несущего винта конструктивно объединен с корпусом 14 управляемой полумуфты, образуя вместе с ним качалку, обладающую возможностью поворота вокруг оси 16.
Качалка 8 образована путем конструктивного объединения корпуса 14 управляемой полумуфты с элементом связи управляемой муфты 10 сцепления со вторым рычагом 2 управления шагом несущего винта. Указанный элемент связи может быть выполнен в виде рычага 24 (как показано на фигуре 3), снабженного присоединительным элементом 25 (представляющим собой, например, ушко).
Механическая проводка синхронизации рукояток 3 и 4 коррекции оборотов двигателя включает соединенные в кольцо канаты 26 и 27, а элемент связи с ней неуправляемой полумуфты выполнен в виде шкива 28, конструктивно объединенного с корпусом 15 неуправляемой полумуфты.
Наиболее высокой точностью самоустановки друг относительно друга в заданное угловое положение будут обладать полумуфты, наклонный срез цилиндрического корпуса каждой из которых выполнен таким образом, что развертка на плоскость этой цилиндрической поверхности (фиг. 6) содержит двухзвенную ломаную, меньший из углов при вершине которой составляет 17-29 угловых градусов, а длина звеньев отличается не более чем на 5%. Так, на фиг.6 граница 29 развертки на плоскость цилиндрической поверхности корпуса 14 управляемой полумуфты со стороны линии пересечения указанной цилиндрической поверхности с торцевой поверхностью 12 контактирования этой полумуфты содержит двухзвенную ломаную ABC (фиг. 6). Меньший из углов при вершине В двухзвенной ломаной ABC (угол Г) выбирают в пределах 17-29 угловых градусов. Длина звеньев АВ и ВС указанной ломаной отличается друг от друга не более чем на 5%. Граница DEF развертки на плоскость цилиндрической поверхности корпуса 15 второй полумуфты со стороны линии пересечения указанной цилиндрической поверхности с торцевой поверхностью 13 контактирования этой полумуфты подобна первой из упомянутых границ. После переноса описанных разверток на заготовку из листового металла известными приемами формообразования цилиндров из листовых заготовок могут быть получены цилиндрические корпуса 14 и 15 полумуфт с наружным диаметром Д. В результате вершина В двухзвенной ломаной ABC на развертке, показанной на фиг. 6, будет соответствовать выступу 31 цилиндрического корпуса 14 управляемой полумуфты на фиг. 5. Соответственно, вершина Е двухзвенной ломаной DEF на развертке, показанной на фиг.6, будет соответствовать впадине 32 цилиндрического корпуса 15 неуправляемой полумуфты на фиг. 5. Угол Г подбирают опытным путем в зависимости от материалов, используемых в указанных цилиндрических корпусах и от расчетного осевого усилия, прикладываемого к корпусам 14 и 15 полумуфт при включении торцевой фрикционной муфты 10.
Описание формы торцевых поверхностей 12 и 13 контактирования цилиндрических корпусов 14 и 15 полумуфт через построение разверток на плоскость наружных поверхностей указанных цилиндрических корпусов использовано в данном случае, поскольку позволяет отказаться от сложного аналитического описания их криволинейных торцевых поверхностей. Такой прием широко используется в технике в связи с тем, что при переносе таких разверток на листовой металл и последующем сгибании их в цилиндр заданная форма криволинейных торцевых поверхностей будет получена автоматически, см., например, книгу «Балдина Е.М. Проектирование и расчет разверток машиностроительных деталей, Л. Машиностроение, 1971 г. с. 19-20».
Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления работает следующим образом.
В штатной ситуации летчик управляет шагом несущего винта вертолета с помощью первого рычага 1 управления на рабочем месте летчика. Второй рычаг 2 управления шагом несущего винта вертолета, расположенный на рабочем месте оператора, находится в «походном», т.е. отключенном от управления, положении (нижнее положение рычага 2 оператора, показанное на фиг. 1).
Для корректировки частоты вращения двигателя летчик использует первую рукоятку 3 коррекции оборотов двигателя, при вращении которой перемещается тяга 9, управляющая топливным регулятором двигателя. Одновременно через тягу 5 движение передается на качалку 7, которая через ее шкив приводит в движение канаты 26 и 27, вращающие шкив 28, жестко связанный с цилиндрическим корпусом 15 неуправляемой полумуфты. Управляемая полумуфта в этом режиме разобщена с неуправляемой полумуфтой, т.е. управляемая муфта сцепления выключена. Поверхности 12 и 13 контактирования цилиндрических корпусов 14 и 15 не соприкасаются во всем диапазоне вращения цилиндрического корпуса 15 неуправляемой полумуфты. Это обусловлено тем, что при перемещении оператором второго рычага 2 управления шагом несущего винта вертолета из «рабочей зоны» через «промежуточную зону» в «походное» положение тяга 11 поворачивает качалку 17, а вместе с ней и колесо 19, на котором установлен штифт 20. В момент выхода второго рычага 2 управления шагом несущего винта вертолета из «рабочей зоны» штифт 20 входит в зацепление с выемкой 21 на рычаге 22, который посредством звена 23 выводит цилиндрический корпус 14 управляемой полумуфты, перемещая его в направлении оси 16, из зацепления с цилиндрическим корпусом 15 неуправляемой полумуфты.
Таким образом, в выключенном положении управляемой муфты кинематическая цепь механической проводки синхронизации рукояток 3 и 4 коррекции оборотов двигателя разомкнута и перемещения первой рукоятки 3 коррекции оборотов двигателя не могут быть синхронизированы с перемещениями второй рукоятки 4 коррекции оборотов двигателя.
При необходимости подключения к управлению вертолетом оператора, он переводит рычаг 2 в «рабочую зону», минуя «промежуточную зону» (фиг. 1). При этом тяга 11 поворачивает качалку 17, вместе с которой поворачивается колесо 19, и штифт 20 взаимодействует с выемкой 21 рычага 22, который посредством звена 23 вводит цилиндрический корпус 14 управляемой полумуфты, перемещая его в направлении оси 16, в зацепление с цилиндрическим корпусом 15 неуправляемой полумуфты.
Текущее взаимное угловое положение корпусов 14 и 15 и, соответственно, их торцевых поверхностей до их касания может быть произвольным. При описанной выше форме контактирующих поверхностей в точке касания от действия осевого усилия, прикладываемого к цилиндрическому корпусу 14 подвижной в осевом направлении управляемой полумуфты, возникает момент силы (вращающий момент), вызывающий вращение указанного цилиндрического корпуса относительно цилиндрического корпуса 15 неуправляемой полумуфты до полного соприкосновения их торцевых поверхностей 12 и 13 контактирования. При этом выступ 31 цилиндрического корпуса 14 управляемой полумуфты совместится с впадиной 32 цилиндрического корпуса 15 неуправляемой полумуфты и, соответственно, выступ 33 цилиндрического корпуса 15 неуправляемой полумуфты совместится с впадиной 34 цилиндрического корпуса 14 управляемой полумуфты. Таким образом, произойдет «самоустановка» торцевых поверхностей 12 и 13 контактирования (фиг. 5) цилиндрических корпусов 14 и 15 полумуфт в заданное друг относительно друга угловое положение, показанное на фигурах 2, 3 и 4. Указанное положение корпусов 14 и 15 полумуфт характеризуется максимальным контактом по поверхностям 12 и 13 контактирования (условная линия контакта полумуфт обозначена на фигуре 4 позицией 35) и способностью управляемой муфты 10 сцепления передавать крутящий момент в обоих направлениях. Начиная с этого момента перемещения рукояток 3 и 4 коррекции оборотов двигателя полностью синхронизированы через включенную управляемую муфту 10 сцепления и описанную выше механическую проводку синхронизации рукояток коррекции оборотов двигателя. Летчик управляет вертолетом с помощью первого рычага 1 управления шагом несущего винта на рабочем месте летчика. Для корректировки частоты вращения двигателя он использует первую рукоятку 3 коррекции оборотов двигателя. При вращении указанной рукоятки 3 тяга 5 поворачивает качалку 7, которая через ее шкив приводит в движение канаты 26 и 27, которые посредством шкива 28 через соединенные друг с другом полумуфты поворачивают качалку 8, которая посредством тяги 6 вращает вторую рукоятку 4 коррекции оборотов двигателя. И наоборот, при вращении оператором второй рукоятки 4 коррекции оборотов двигателя, ее перемещения заставляют вращаться первую рукоятку 3 коррекции оборотов двигателя, что позволяет летчику, при необходимости, не участвовать в этом процессе. Таким образом, при включенной управляемой муфте 10 сцепления оператор может взять полностью на себя коррекцию оборотов двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
| ТРАНСПОРТНО-БОЕВОЙ ВЕРТОЛЕТ | 2006 |
|
RU2340511C2 |
| СУММИРУЮЩИЙ МЕХАНИЗМ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ВЕРТОЛЕТОВ ТРЕХТОЧЕЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ С НАКЛОННЫМ РАСПОЛОЖЕНИЕМ ГИДРОПРИВОДОВ | 2014 |
|
RU2578706C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ЧИСЛА ОБОРОТОВ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА В ДОПУСТИМЫХ ПРЕДЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231479C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ СООСНОЙ СХЕМЫ | 2021 |
|
RU2763198C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ВЕРТОЛЁТА | 2022 |
|
RU2789499C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2013 |
|
RU2559676C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 1990 |
|
SU1826423A1 |
Изобретение относится к вертолетостроению, в частности к системам управления шагом несущего винта и двигателем вертолета. Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления содержит первый и второй рычаги управления шагом несущего винта, снабженные соответственно первой и второй рукоятками коррекции оборотов двигателя. В механическую проводку синхронизации рукояток коррекции оборотов двигателя встроена управляемая муфта сцепления, вход управления которой связан со вторым рычагом управления шагом несущего винта. Управляемая муфта сцепления содержит снабженную механизмом управления управляемую полумуфту и неуправляемую полумуфту, которые обладают возможностью взаимного контактирования друг с другом геометрически подобными друг другу торцевыми поверхностями наклонных срезов их цилиндрических корпусов, установленных соосно с возможностью вращения вокруг своей оси. Обеспечивается возможность подключения или отключения рукоятки коррекции оборотов двигателя к механической проводке синхронизации рукояток, самоустановки частей муфты, передающих крутящий момент, в заданное друг относительно друга угловое положение. 2 н. и 3 з.п. ф-лы, 6 ил.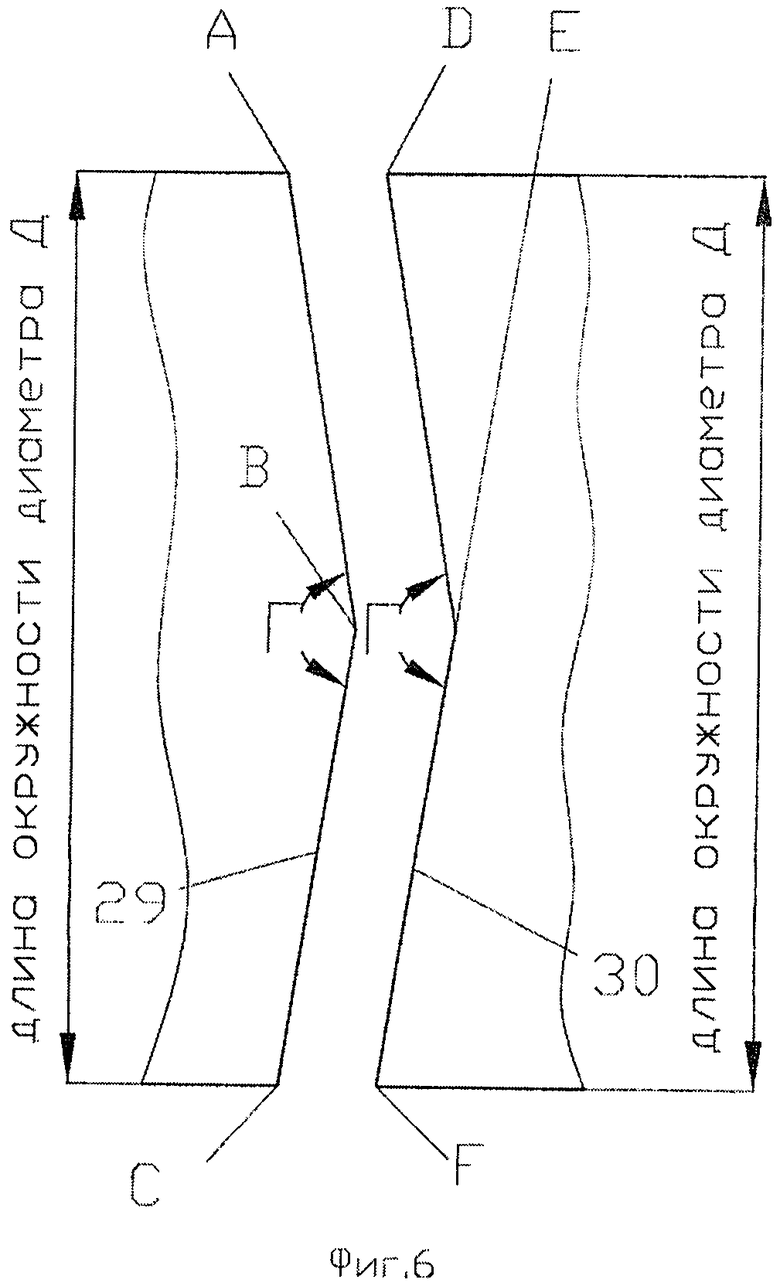
1. Узел объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, содержащий первый и второй рычаги управления шагом несущего винта, снабженные соответственно первой и второй рукоятками коррекции оборотов двигателя, механическую проводку синхронизации рукояток коррекции оборотов двигателя, включающую тяги и качалки, элемент связи первой рукоятки коррекции оборотов двигателя с топливным регулятором двигателя, отличающийся тем, что в механическую проводку синхронизации рукояток коррекции оборотов двигателя встроена управляемая муфта сцепления, вход управления которой связан со вторым рычагом управления шагом несущего винта.
2. Управляемая муфта сцепления для узла объединенного управления шагом несущего винта и двигателем вертолета со спаренной системой управления, содержащая снабженную механизмом управления управляемую полумуфту и неуправляемую полумуфту, которые обладают возможностью взаимного контактирования друг с другом геометрически подобными друг другу торцевыми поверхностями наклонных срезов их цилиндрических корпусов, установленных соосно с возможностью вращения вокруг своей оси, при этом цилиндрический корпус управляемой полумуфты выполнен подвижным в осевом направлении, механизм управления включает связанные между собой качалку, присоединительный элемент которой является входом управления муфты, и колесо, снабженное штифтом, обладающим возможностью взаимодействия с выемкой рычага, связанного с передаточным звеном, присоединенным к корпусу управляемой полумуфты, который снабжен элементом связи со вторым рычагом управления шагом несущего винта, корпус неуправляемой полумуфты снабжен элементом связи с механической проводкой синхронизации рукояток коррекции оборотов двигателя.
3. Управляемая муфта сцепления по п. 2, отличающаяся тем, что корпус управляемой полумуфты и элемент ее связи со вторым рычагом управления шагом несущего винта конструктивно объединены и выполнены в виде качалки.
4. Управляемая муфта сцепления по п. 2, отличающаяся тем, что механическая проводка синхронизации рукояток коррекции оборотов двигателя выполнена канатной, а элемент связи с ней неуправляемой полумуфты выполнен в виде шкива, конструктивно объединенного с корпусом неуправляемой полумуфты.
5. Управляемая муфта сцепления по любому из пп. 2-4, отличающаяся тем, что наклонный срез цилиндрического корпуса каждой полумуфты выполнен таким образом, что развертка на плоскость этой цилиндрической поверхности содержит двухзвенную ломаную, меньший из углов при вершине которой составляет 17-29 угловых градусов, а длина звеньев отличается не более чем на 5%.
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ И РАЗДВИЖНАЯ ТЯГА ПРОВОДКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2013 |
|
RU2527574C1 |
| Выключающаяся ручка управления самолетом | 1930 |
|
SU25404A1 |
| US 5820071 A1, 13.10.1998 | |||
| US 4122927 A1, 31.10.1978 | |||
| Торцевая зубчатая муфта сцепления | 1949 |
|
SU87516A1 |

