1. Область применения изобретения
Настоящее изобретение относится к роботизированному чистящему устройству, роботизированной чистящей системе и способу управления этой системой, которые обеспечивают возможность управления перемещением роботизированного чистящего устройства путем использования верхнего изображения, снимаемого при перемещении этого устройства.
2. Описание уровня техники
Из заявки ФРГ 4340771, кл. A 47 L 11/40, опубликованной 15.12.1994, известны роботизированное чистящее устройство, роботизированная чистящая система и способ управления этой системой. Известное роботизированное чистящее устройство предназначено для осуществления чистки путем беспроводной связи с внешнем устройством и содержит приводной узел для привода колес и контроллер для управления приводным узлом с обеспечением возможности перемещения роботизированного чистящего устройства в зоне чистки в соответствии с заданной схемой перемещения и коррекции траектории перемещения. Такое роботизированное чистящее устройство определяет зону чистки, окруженную стенкой или препятствиями, перемещаясь по ее внешнему контуру, с использованием ультразвукового датчика, расположенного на главном корпусе, и составляет план траектории чистки для осуществления чистки определенной им зоны. Затем роботизированное чистящее устройство приводит в действие колеса для прохождения по намеченной траектории путем вычисления дальности перемещения и текущего положения на основе сигнала, полученного с помощью датчика числа оборотов колес и угла поворота. Однако из-за проскальзывания колес при перемещении чистящего устройства и неровностей пола указанный выше способ определения положения имеет погрешность между дальностью перемещения и перемещенным положением, вычисленными с использованием сигнала от указанного датчика, и реальными дальностью перемещения и положением. При этом чем больше перемещается чистящее устройство, тем больше возрастает погрешность определения положения. Таким образом, чистящее устройство, приводимое в движение при наличии накопленной таким образом погрешности, может отклониться от намеченной траектории чистки. В результате часть зоны может остаться не почищенной, а другая часть почищена устройством несколько раз. Следовательно, эффективность чистки может ухудшиться.
Из той же заявки ФРГ 4340771 известна роботизированная чистящая система, содержащая приводной узел для привода колес и роботизированное чистящее устройство. Недостатком известной системы является недостаточная точность определения положения роботизированного чистящего устройства по причинам, указанным выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание роботизированного чистящего устройства, роботизированной чистящей системы и способа их управления, которые обеспечивают эффективное осуществление управляемой по команде чистки путем простой коррекции траектории перемещения и точного определения текущего положения роботизированного чистящего устройства.
Указанная цель достигается тем, что создано роботизированное чистящее устройство для осуществления чистки путем беспроводной связи с внешним устройством, содержащее приводной узел для привода колес, расположенную на главном корпусе верхнюю камеру для съемки верхнего изображения перпендикулярно направлению перемещения и контроллер для управления приводным узлом с обеспечением возможности перемещения роботизированного чистящего устройства в зоне чистки в соответствии с заданной схемой перемещения и коррекции траектории перемещения путем анализа изображения, снимаемого верхней камерой.
Предпочтительно контроллер служит для управления приводным узлом с обеспечением перемещения в зоне чистки в соответствии с заданной схемой перемещения и создания при работе в режиме составления карты зоны чистки карты изображения с привязкой к верхней зоне с использованием изображения, снимаемового верхней камерой. Кроме того, контроллер служит для определения положения путем сравнения карты изображения и текущего изображения, полученного от верхней камеры, и при получении сигнала чистки для управления приводным узлом в соответствии с целевой траекторией перемещения из определенного таким образом положения.
Предпочтительно контроллер служит для создания карты изображения всякий раз при передаче сигнала чистки.
Предпочтительно на главном корпусе расположена передняя камера для съемки изображения по направлению перемещения. Контроллер обеспечивает создание карты изображения путем трехмерного преобразования верхнего изображения, снимаемого верхней камерой, и переднего изображения, снимаемого передней камерой.
Предпочтительно контроллер служит для разбивания карты изображения на небольшие ячейки заданного размера, определения наличия особого признака в этих ячейках и задания этого признака в качестве стандартной координатной точки для определения положения. К особым признакам может относиться по меньшей мере один из таких элементов, как электрическая лампа, датчик пожарной сигнализации, люминесцентная лампа и репродуктор.
Предпочтительно контроллер служит для выделения линейного элемента в изображении, снимаемом верхней камерой при перемещении роботизированного чистящего устройства, и для коррекции траектории перемещения с использованием этого выделенного линейного элемента.
Указанная цель достигается также тем, что создана роботизированная чистящая система, содержащая приводной узел для привода колес, роботизированное чистящее устройство, имеющее расположенную на главном корпусе верхнюю камеру для съемки верхнего изображения перпендикулярно направлению перемещения, и дистанционный контроллер для беспроводной связи с указанным чистящим устройством. Дистанционный контроллер служит для управления роботизированным чистящим устройством с обеспечением его перемещения в зоне чистки в соответствии с заданной схемой перемещения и для коррекции траектории перемещения путем анализа изображения, переданного после съемки верхней камерой.
В предпочтительном варианте дистанционный контроллер служит для управляения роботизированным чистящим устройством с обеспечением его перемещения в зоне чистки в соответствии с заданной схемой перемещения и для создания при работе в режиме составления карты зоны чистки карты с привязкой к верхней зоне с использованием изображения, снимаемого верхней камерой. Кроме того, дистанционный контроллер служит для определения положения путем сравнения карты изображения и текущего изображения, переданного с чистящего устройства после съемки этого изображения верхней камерой, и при получении сигнала чистки для задания траектории чистки роботизированного чистящего устройства из определенного таким образом положения для выполнения им намеченной работы.
Предпочтительно дистанционный контроллер служит для создания карты изображения всякий раз при передаче сигнала чистки.
На главном корпусе может быть расположена передняя камера для съемки изображения по направлению перемещения роботизированного чистящего устройства. При этом дистанционный контроллер служит для создания карты изображения путем трехмерного преобразования верхнего изображения и переднего изображения, переданных указанным чистящим устройством после их съемки соответственно верхней и передней камерами.
Контроллер может служить для разбивания карты изображения на небольшие ячейки заданного размера, определения наличия особого признака в этих ячейках и задания этого признака в качестве стандартной координатной точки для определения положения.
Особый признак может включать по меньшей мере один из таких элементов, как электрическая лампа, датчик пожарной сигнализации, люминесцентная лампа и репродуктор.
Предпочтительно дистанционный контроллер служит для выделения линейного элемента в изображении, переданном после съемки верхней камерой, и для коррекции траектории перемещения с использованием этого выделенного линейного элемента при управлении перемещением роботизированного чистящего устройства.
Указанная цель достигается также тем, что создан способ управления роботизированным чистящим устройством, содержащим верхнюю камеру для съемки верхнего изображения, согласно которому осуществляют создание карты изображения с привязкой к верхней зоне с использованием снимаемого верхней камерой изображения, путем перемещения роботизированного чистящего устройства в зоне чистки в соответствии с заданной схемой перемещения, определение положения роботизированного чистящего устройства путем сравнения изображения записанной карты изображения и снимаемого верхней камерой текущего изображения и вычисление траектории перемещения из определенного таким образом положения в целевое положение при получении сигнала чистки и перемещение роботизированного чистящего устройства в соответствии с вычисленной траекторией перемещения.
Указанная цель достигается также тем, что создан способ управления роботизированным чистящим устройством, содержащим верхнюю камеру для съемки верхнего изображения, согласно которому при установлении режима составления карты зоны чистки осуществляют создание карты зоны чистки путем перемещения роботизированного чистящего устройства в указанной зоне и сохранение этой карты в памяти, вычисление траектории перемещения в соответствии с заданным порядком чистки при получении сигнала чистки, перемещение роботизированного чистящего устройства в соответствии с вычисленной траекторией перемещения и коррекцию траектории его перемещения путем анализа изображения, снимаемого верхней камерой.
Предпочтительно на этапе коррекции траектории перемещения выделяют линейный элемент в изображении, снимаемом верхней камерой, и корректируют траекторию перемещения с использованием этого выделенного линейного элемента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанная цель и преимущества настоящего изобретения с очевидностью следуют из описания его предпочтительных вариантов выполнения со ссылками на прилагаемые чертежи, на которых:
фиг. 1 изображает вид в аксонометрии предлагаемого роботизированного чистящего устройства со снятой крышкой;
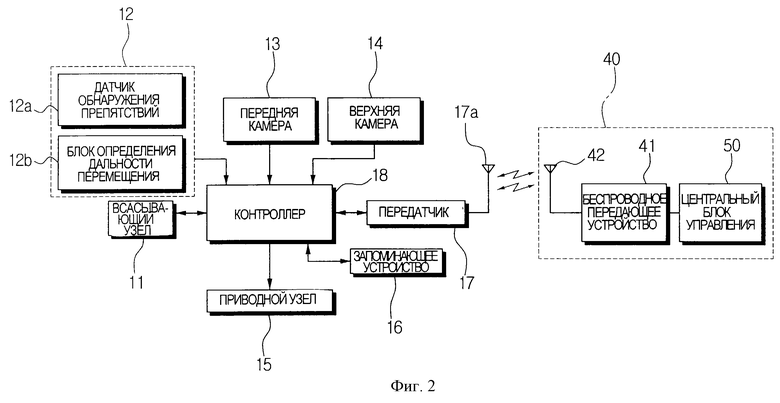
фиг.2 - блок-схему предлагаемого роботизированного чистящего устройства;
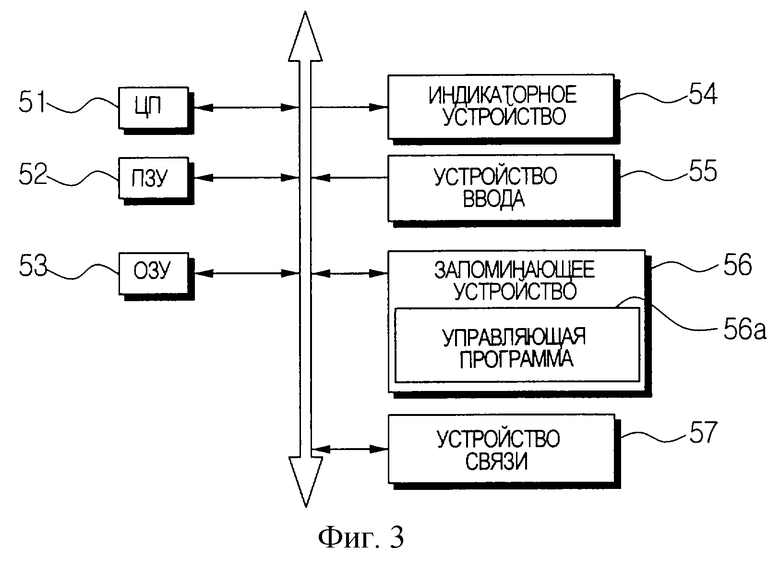
фиг.3 - блок-схему центрального блока управления, показанного на фиг.2;
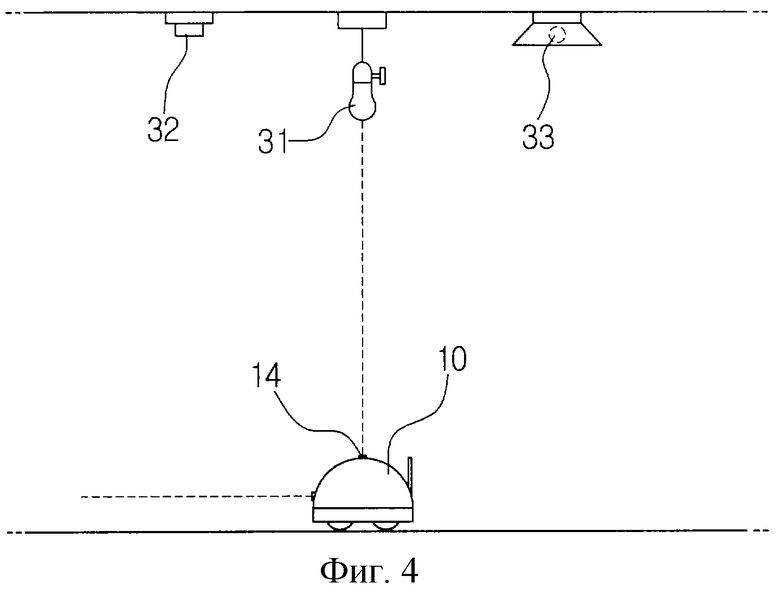
фиг. 4 иллюстрирует расположение в помещении роботизированного чистящего устройства, показанного на фиг.1;
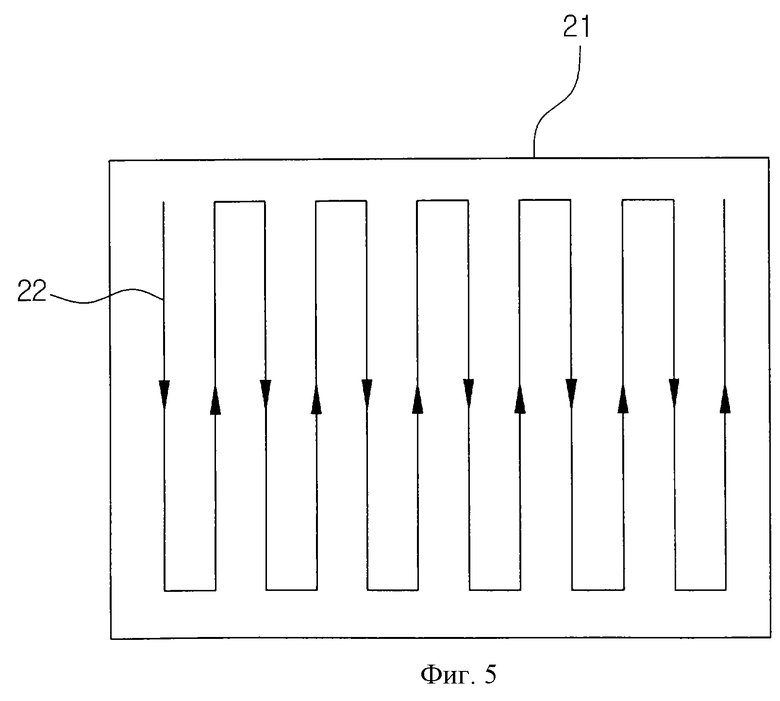
фиг. 5 изображает траекторию перемещения роботизированного чистящего устройства в помещении, показанном на фиг.4;
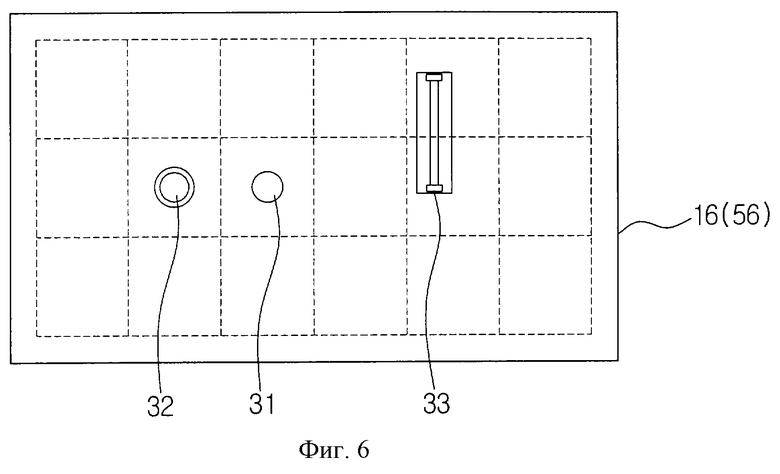
фиг.6 - пример карты изображения, созданной путем преобразования изображения, снимаемого по траектории перемещения, показанной на фиг.5;
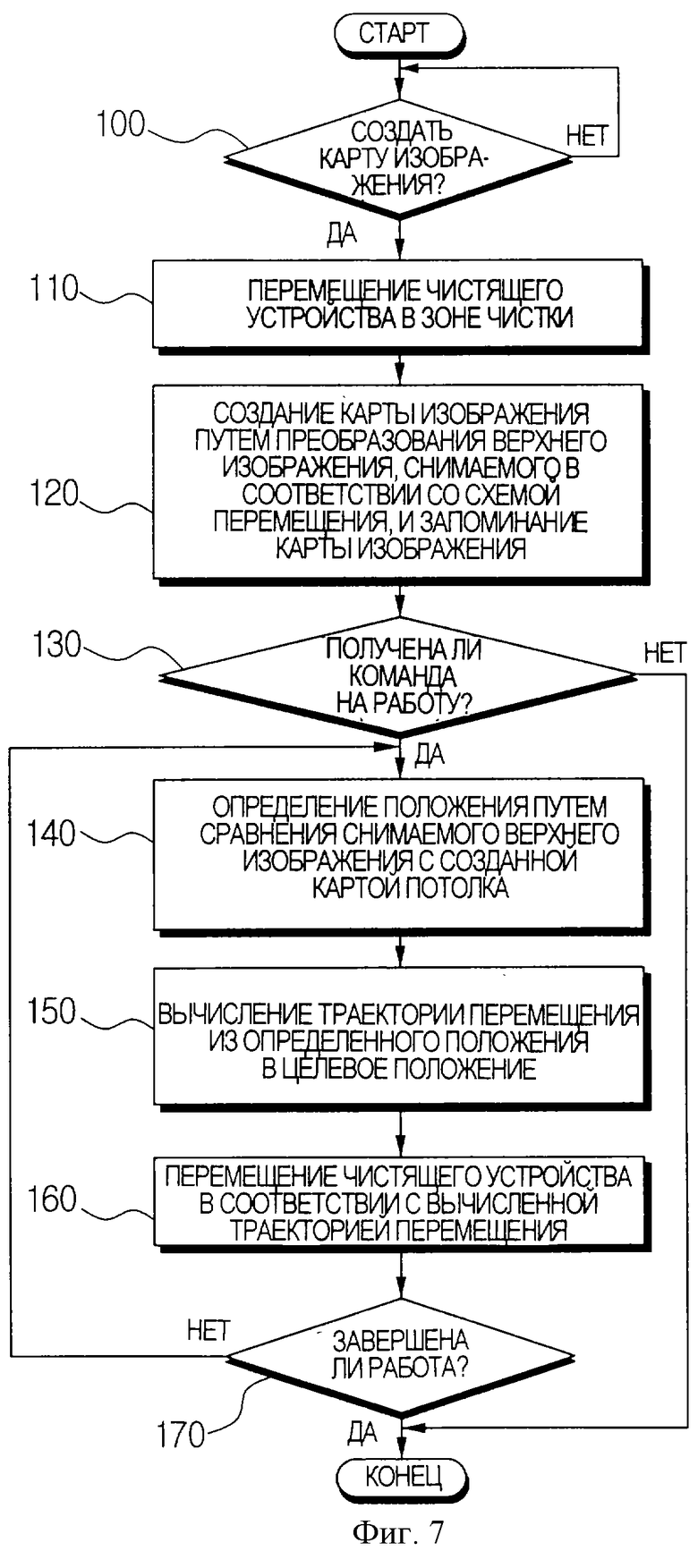
фиг. 7 - блок-схему алгоритма, иллюстрирующую процесс управления роботизированным чистящим устройством в соответствии с одним предпочтительным вариантом выполнения настоящего изобретения;
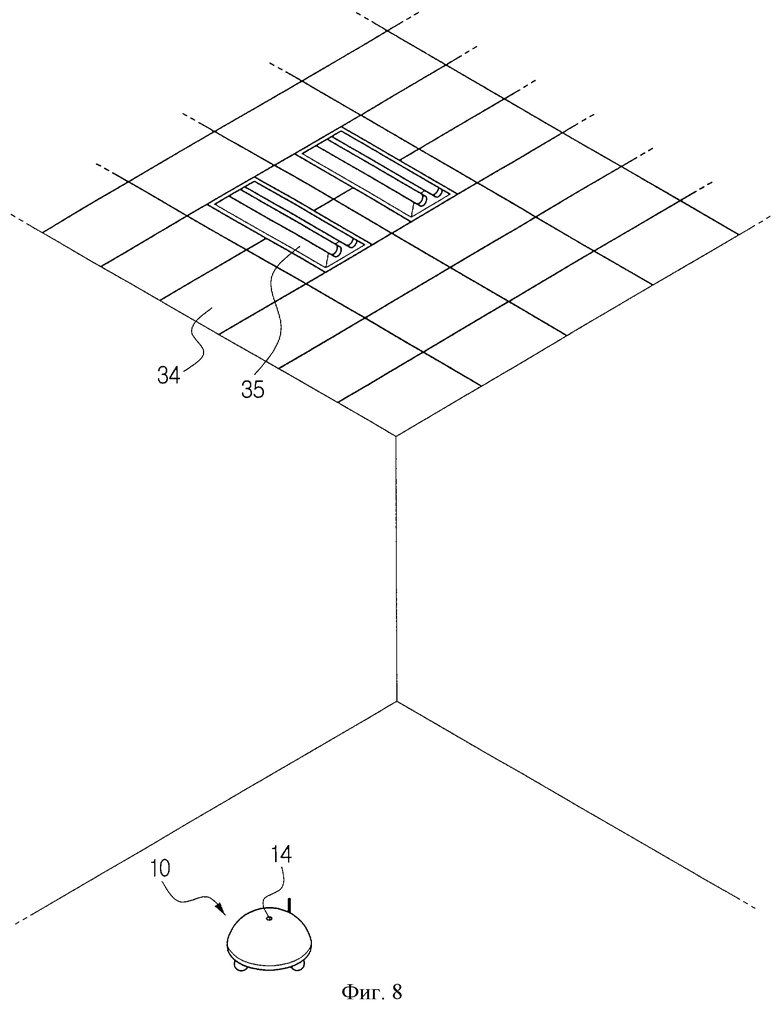
фиг.8 - еще один пример потолка помещения;
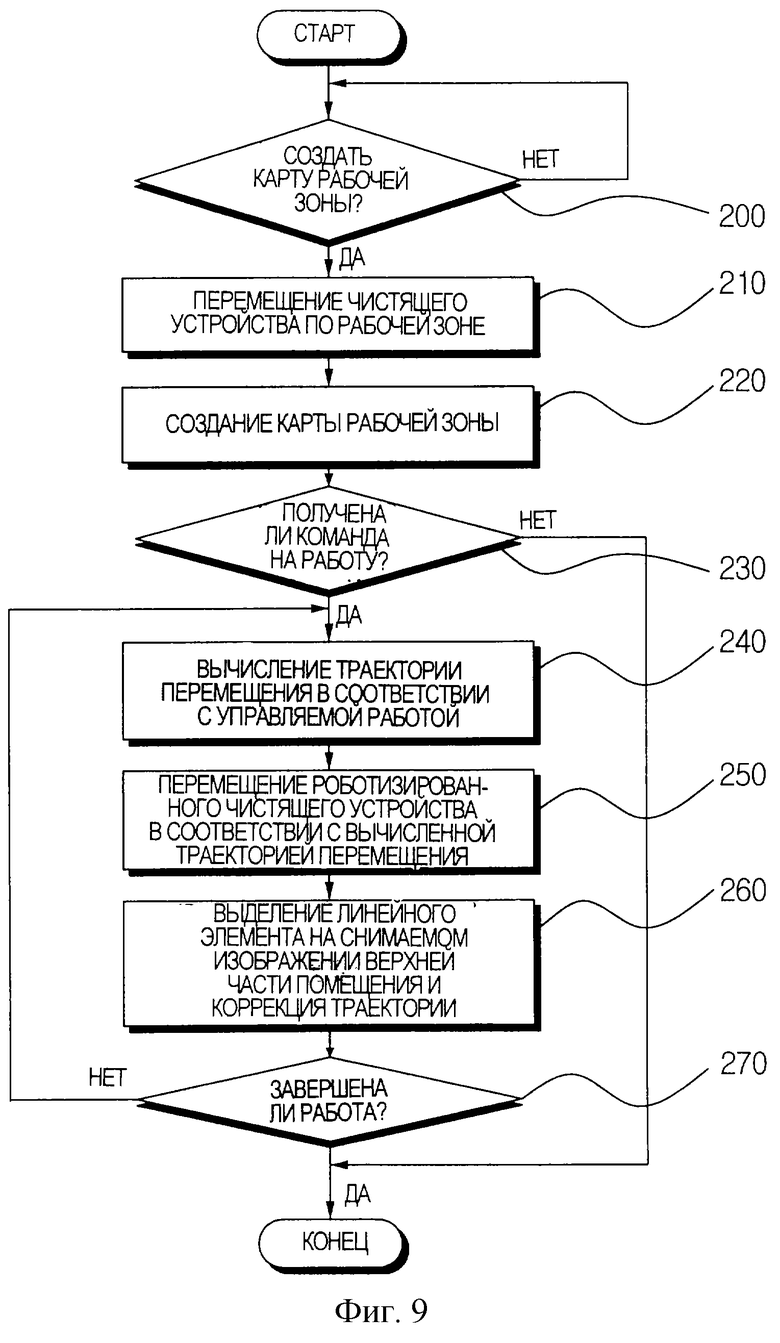
фиг. 9 - блок-схему, иллюстрирующую процесс управления роботизированным чистящим устройством в соответствии с еще одним предпочтительным вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Предпочтительные варианты выполнения настоящего изобретения подробно описаны ниже со ссылками на прилагаемые чертежи.
Как показано на фиг.1 и 2, роботизированное чистящее устройство 1 содержит всасывающий узел 11, воспринимающий блок 12, переднюю камеру 13, верхнюю камеру 14, приводной узел 15, запоминающее устройство 16, передатчик 17 и контроллер 18, а также батарею 19.
Узел 11 установлен на главном корпусе 10а и предназначен для сбора пыли с расположенного напротив него пола при втягивании воздуха. Узел 11 может быть выполнен известным способом. В качестве примера узел 11 имеет двигатель (не показан) для создания всасывающей тяги и всасывающую камеру для сбора воздуха, втягиваемого через всасывающее отверстие или всасывающую трубу, расположенное (расположенную) напротив пола, путем приведения в действие указанного двигателя.
Блок 12, посылающий сигнал внешнему приемнику, содержит датчик 12а обнаружения препятствий, расположенный по боковой периферии корпуса с заданными интервалами и предназначенный для приема отраженного сигнала, и датчик 12b определения дальности перемещения, предназначенный для измерения величины дальности перемещения.
Датчик 12а имеет инфракрасные излучающие элементы 12а1, предназначенные для испускания инфракрасных лучей, и световоспринимающие элементы 12а2, предназначенные для восприятия отраженного света. Элементы 12а1 и 12а2 расположены по внешней периферии датчика 12а парами, сформированными перпендикулярно. С другой стороны, датчик 12а может включать ультразвуковой датчик, способный испускать ультразвук и воспринимать отраженный ультразвук. Датчик 12а также используется для измерения расстояния между чистящим устройством и препятствием, или стеной.
Датчик 12b может включать датчик определения числа оборотов, предназначенный для определения числа оборотов колес 15a-15d. При этом, например, датчик определения числа оборотов может включать кодовый датчик, предназначенный соответственно для определения числа оборотов двигателей 15e-15f.
Передняя камера 13, расположенная на главном корпусе 10а, предназначена для съемки переднего изображения и передачи снимаемого изображения на контролер 18.
Верхняя камера 14, расположенная на корпусе 10а, предназначена для съемки верхнего изображения и передачи снимаемого изображения на контролер 18.
Приводной узел 15 содержит два колеса 15а, 15b, расположенных спереди с обеих сторон, два колеса 15с, 15d, расположенных сзади с обеих сторон, двигатели 15е, 15f для вращения задних колес 15с, 15d и приводной ремень 15g для передачи энергии задних колес 15с, 15d на передние колеса 15а, 15b. Двигатели 15е, 15f узла 15 способны вращаться независимо в разных направлениях в соответствии с управляющим сигналом контроллера 18. Вращение может осуществляться с различным числом оборотов.
Передатчик 17 посылает данные об объекте через антенну 17а и передает сигнал, переданный через эту антенну, на контроллер 18.
Контроллер 18 обрабатывает сигнал, переданный передатчиком 17, и управляет каждым элементом. Контроллер 18 обрабатывает входной сигнал, полученный от клавишного устройства ввода, если такое устройство, клавиши которого предназначены для управления функциями машины, дополнительно имеется на главном корпусе 10а.
Управляя узлом 15, контроллер 18 корректирует траекторию перемещения устройства 10 путем анализа изображения, снимаемого камерой 14, для перемещения в зоне чистки в соответствии со схемой перемещения, задаваемой командой на чистку.
В соответствии с первым аспектом настоящего изобретения при установлении режима создания карты изображения контроллер 18 создает карту изображения с привязкой к верхней зоне с использованием изображения, снимаемого камерой 14, путем управления узлом 15 для перемещения устройства 10 в зоне чистки в соответствии с заданной схемой перемещения для создания карты и запоминает созданную карту в запоминающем устройстве 16. Контроллер 18 может быть установлен на осуществление указанного режима при поступлении сигнала выполнения этого режима извне беспроводным способом или с клавишного устройства ввода. С другой стороны, контроллер 18 может быть установлен на осуществление режима создания карты изображения перед осуществлением чистки при передаче команды на чистку извне беспроводным способом или с клавишного устройства ввода.
При работе в режиме создания карты изображения контроллер 18 управляет узлом 15 в соответствии со схемой перемещения, заданной для съемки камерой 14 зоны чистки, окруженной препятствием или стеной, другими словами, всего помещения, путем разделения этого помещения. В качестве примера схемы перемещения контроллер 18 перемещает устройство 10 вперед из текущего положения, а при обнаружении датчиком 12а стены или препятствия определяет это положение как исходное. После этого контроллер 18 выдает команду узлу 15 на перемещение устройства 10 до тех пор, пока последнее не вернется в свое исходное положение, перемещаясь вдоль стены. Затем контроллер 18 перемещает устройство 10 в пределах зоны, заданной нанесенным контуром, вдоль линии перемещения, проходящей с равными интервалами. Другими словами, контроллер 18 управляет узлом 15 для перемещения устройства 10 вдоль линии 22 перемещения, намеченной в зоне 21 чистки, заданной как показано на фиг.5. При этом интервал линии 22 задают с обеспечением последовательного получения верхних изображений. Верхнее изображение снимается при перемещении устройства 10 по линии 22. Кроме того, цикл съемки отдельного фрагмента предпочтительно задают так, чтобы величина его перекрытия с соседним из верхних изображений, снимаемых или выделяемых при перемещении, составляла от 10% до 20%. Для определения требуемого цикла съемки можно несколько раз предварительно снять ряд изображений. С другой стороны, цикл съемки заранее задают с учетом угла обзора камеры 14 и расстояния от пола до потолка в обычном помещении, а затем по каждому заданному циклу съемки может выполняться съемка.
Изображение, снимаемое верхней камерой 14 в процессе перемещения, хранится в устройстве 16 как карта верхнего изображения, показанная на фиг.6, на которой все изображение сведено к установленным на потолке элементам, показанным на фиг.4, таким как электрическая лампа 31, датчик 32 пожарной сигнализации, люминесцентная лампа 33. Эта съемка осуществляется под управлением контроллера 18.
Предпочтительно контроллер 18 разделяет карту изображения, хранящуюся в устройстве 16, на несколько ячеек. Кроме того, контроллер 18 осуществляет обработку изображения для задания особого признака в качестве стандартной координатной точки, что позволяет без затруднения определять положение устройства 10 путем выделения на изображениях этого признака, соответствующего каждой ячейке. Например, лампа 31, датчик 32 и люминесцентная лампа 33 прямого света заданы как особые признаки для способа обработки изображения применительно к снимаемому изображению этих элементов, показанных на фиг.4. Способ обработки изображения для выделения особых признаков на снимаемом изображении может включать различные известные способы. Например, может применяться способ, при котором после перевода снимаемого изображения в полутоновое изображение обрабатывают координатную точку, рассчитанную путем соединения точек пиксел, имеющих одинаковые значения, в качестве особых признаков. Кроме того, зона изображения, имеющая распределение, схожее с величиной записанных данных, может быть задана как соответствующий особый признак после предварительного запоминания типа распределения видеоданных, относящихся к особым признакам.
В соответствии со вторым аспектом настоящего изобретения контроллер 18 создает карту изображения путем трехмерного преобразования переднего изображения, снимаемого передней камерой 13, и верхнего изображения, снимаемого верхней камерой 14, и запоминает созданную карту в устройстве 16. При создании и использовании трехмерной карты изображения точность определения положения может быть улучшена. В этом случае предпочтительно при определении положения сначала осуществляют определение положения исходя из верхнего изображения, имеющей меньшее разнообразие установленных элементов. Если положение точно не определено, целесообразно обратиться к переднему изображению.
Контроллер 18 определяет положение устройства 10 с помощью карты изображения, созданной при осуществлении чистки устройством 10, после создания этой карты. Другими словами, контроллер 18 определяет текущее положение устройства 10 путем сравнения текущего изображения, полученного только от верхней камеры 14 или от обеих камер 13 и 14, с хранящейся в памяти картой изображения и при поступлении беспроводным способом извне или с клавишного устройства ввода сигнала управления чисткой управляет узлом 15 в соответствии с целевой траекторией перемещения из положения, определенного как указано выше. В данном случае сигнал управления чисткой включает выполнение наблюдения камерами 13 и 14 или чистку. Контроллер 18 вычисляет погрешность перемещения с использованием текущего положения, определенного с помощью дальности перемещения, измеренной кодовым датчиком, и сравнением текущего снимаемого изображения с хранящейся картой изображения, и управляет узлом 15 для прокладывания целевой траектории перемещения путем корректировки погрешности.
Выше указано, что карту изображения создает непосредственно контроллер 18, а положение устройства 10 определяется им самим с использованием созданной карты изображения.
В соответствии с третьим аспектом настоящего изобретения для внешней обработки процессов создания карты верхнего изображения и определения положения устройства 10 создана роботизированная чистящая система, предназначенная для уменьшения рабочей нагрузки, необходимой для создания карты изображения устройства 10 и определения его положения.
И наконец, устройство 10 выполнено с возможностью беспроводной передачи внешнему устройству информации о снимаемом изображении и работы в соответствии с управляющим сигналом, полученным от внешнего устройства. Кроме того, дистанционный контроллер 40 беспроводным способом управляет перемещением устройства 10, определяет его положение и создает карту изображения.
Дистанционный контроллер 40 содержит беспроводное ретранслирующее устройство 41 и центральный блок 50 управления.
Устройство 41 обрабатывает сигнал, переданный беспроводным способом от устройства 10, и передает по проводам обработанный сигнал блоку 50. Кроме того, беспроводное передающее устройство беспроводным способом передает сигнал, полученный от блока 50, устройству 10 посредством антенны 42.
Блок 50 содержит обычный компьютер; пример блока 50 показан на фиг.3. Как показано на этом чертеже, блок 50 содержит ЦП (центральный процессор) 51, ПЗУ (постоянное запоминающее устройство) 52, ОЗУ (оперативное запоминающее устройство) 53, индикаторное устройство 54, устройство 55 ввода, запоминающее устройство 56 и устройство 57 связи.
Устройство 56 содержит управляющую программу 56а для управления роботизированным чистящим устройством 10 и обработки передаваемого им сигнала.
Программа 56а имеет меню для управления устройством 10 посредством устройства 54. Программа 56а обрабатывает выбранный пользователем пункт меню, который должно выполнить устройство 10 при приведении его в действие. Предпочтительно меню включает создание карты зоны чистки, чистку и наблюдение. Кроме того, целесообразно наличие таких подменю, как создание карты изображения, список выбора целевых зон и способ чистки.
При наличии меню для создания карты зоны чистки или карты изображения предпочтительно, чтобы при осуществлении чистки устройством 10 пользователь мог устанавливать уточненный цикл на неделю или месяц для уточнения карты изображения.
При введении пользователем сигнала создания карты изображения посредством устройства 55 или во время создания исходной карты изображения программа 56а управляет устройством 10 для приема во всей зоне чистки верхнего изображения, необходимого для создания карты изображения, как описано выше. Программа 56а создает карту изображения путем преобразования изображения, переданного путем управления устройством 10, и сохраняет созданную карту в памяти устройства 56. В этом случае контроллер 18 устройства 10 управляет узлом 15 в соответствии с управляющей информацией, переданной программой 56а посредством устройства 41, и таким образом рабочая нагрузка при создании карты изображения отсутствует. Кроме того, контроллер 18 посредством устройства 41 передает верхнее изображение, снимаемое с регулярным циклом при перемещении роботизированного чистящего устройства, блоку 50. Программа 56а может создавать карту изображения путем совместного преобразования переднего изображения и верхнего изображения.
Способ определения положения устройства 10, приводимого в действие, как описано выше, описан ниже со ссылкой на фиг.7.
Прежде всего контроллер 18 выявляет необходимость осуществления режима создания карты изображения (шаг S100).
При выявлении такой необходимости контроллер 18 приводит устройство 10 в действие для съемки всего верхнего изображения (шаг S110).
Контроллер 18 создает карту изображения путем преобразования снимаемого камерой 14 верхнего изображения (и переднего изображения), соответствующего зоне чистки, и сохраняет созданную карту в памяти запоминающего устройства 16, 56 (шаг S120).
Затем контроллер 18 определяет, передана ли команда на чистку (шаг S130).
При обнаружении передачи такой команды контроллер 18 определяет положение устройства 10 путем сравнения верхнего изображения, переданного верхней камерой 14, с хранящейся картой изображения (шаг S140). Если на шаге 140 карта изображения включает информацию о переднем изображении, текущее переднее изображение может также использоваться для определения положения.
Затем, в соответствии с переданной командой на чистку (шаг S150), контроллер 18 вычисляет траекторию перемещения из текущего положения, определенного как указано выше, в зону чистки или траекторию чистки.
Далее контроллер 18 перемещает устройство 10 в соответствии с вычисленной траекторией перемещения (шаг S160).
После этого контроллер 18 определяет, завершена ли работа (шаг S170). В данном случае под работой подразумевается работа по чистке, выполняемая при перемещении по траектории чистки или к целевому положению. Если контроллер определил, что работа не завершена, шаги 140-160 повторяют до тех пор, пока она не завершится.
С другой стороны, в соответствии с четвертым вариантом выполнения настоящего изобретения, если потолок имеет прямоугольный периметр, применяют способ перемещения устройства 10, позволяющий путем съемки потолка снизить нагрузку в процессе коррекции траектории перемещения.
Например, как показано на фиг.8, если потолок составлен из прямоугольных гипсокартонных листов 34 или если на потолке установлены лампы 35 прямого света, имеется возможность коррекции погрешности перемещения посредством контроллера 18 и/или дистанционного контроллера 40 путем использования особенностей потолка, заключающихся в прямолинейном контуре.
Для этого контроллер 18 выделяет линейный элемент в изображении, снимаемом верхней камерой 14 при перемещении устройства 10, с использованием известного способа обработки изображения выявленной кромки и корректирует траекторию перемещения путем использования данных о выделенном линейном элементе.
Предпочтительно контроллер 18 корректирует погрешность перемещения, определенную относительно заданного времени или заданного расстояния до кодового датчика. Затем контроллер 18 повторно корректирует погрешность перемещения путем использования линейного элемента изображения, снимаемого верхней камерой.
Другими словами, контроллер 18 вычисляет погрешность траектории перемещения путем ее определения кодовым датчиком и управляет узлом 15 для обеспечения возможности возвращения устройства 10 на целевую траекторию перемещения в соответствии с вычисленной погрешностью. Затем контроллер 18 корректирует погрешность перемещения путем вычисления погрешности отклонения устройства 10 от траектории с использованием информации о направлении линейного элемента, выделенного путем анализа видеоданных, снимаемых камерой 14.
Вышеописанный способ может применяться для вышеописанной роботизированной чистящей системы.
Здесь в качестве способа обработки изображения выявленной кромки могут применяться различные способы, например "Sobel Alorithm" или "Navatiark Babu Alorithm".
Ниже со ссылкой на фиг.9 подробно описан способ управления роботизированным чистящим устройством, обеспечивающий возможность корректировки погрешности перемещения путем выделения линейного элемента в верхнем изображении верхней части помещения.
Прежде всего контроллер 18 выявляет необходимость выполнения режима создания карты зоны чистки (шаг S200).
При выявлении такой необходимости контроллер 18 перемещает устройство 10 в пределах зоны чистки (шаг S210).
Схема перемещения устройства 10 применительно к способу создания карты зоны чистки такая же, как и в вышеописанном примере. Сначала устройство 10 перемещается вперед и при обнаружении стены или препятствия датчиком 12а его положение устанавливают как исходное. Затем контроллер 18 управляет узлом 15 для перемещения устройства 10 до тех пор, пока последнее не вернется в исходное положение, перемещаясь по контуру помещения вдоль стены. После этого контроллер 18 перемещает устройство 10 в пределах зоны, определяемой контуром перемещения, вдоль линии перемещения, проходящей с заданными интервалами. Контроллер 18 создает карту зоны чистки, используя информацию о препятствии или о траектории перемещения, определенной во время описанного выше перемещения, и сохраняет эту карту в памяти (шаг S220). Следует отметить, что создание карты зоны чистки и ее сохранение в памяти осуществляют таким же способом, как и вышеописанный способ создания карты изображения.
Затем контроллер 18 определяет, передана ли команда на чистку (шаг S230).
При обнаружении передачи такой команды контроллер 18 вычисляет траекторию перемещения для перемещения в зону чистки или траекторию чистки в соответствии с переданной командой на чистку (шаг S240).
Далее контроллер 18 перемещает устройство 10 в соответствии с вычисленной траекторией перемещения (шаг S250).
Контроллер 18 выделяет линейный элемент в изображении, снимаемом верхней камерой 14 при перемещении устройства 10, и корректирует погрешность перемещения, используя данные о выделенном линейном элементе (шаг S260). Предпочтительно анализ изображения, снимаемого верхней камерой 14, выполняют при каждом цикле, заданном для снижения нагрузки при обработке изображения.
После этого контроллер 18 определяет (шаг S270), завершена ли работа при перемещении устройства 10 с выполнением вышеописанного процесса. Если контроллер 18 определил, что работа не завершена, шаги 240-260 повторяются им до тех пор, пока устройство 10 не завершит чистку.
Как описано выше, роботизированное чистящее устройство, роботизированная чистящая система и способ управления ими в соответствии с настоящим изобретением позволяют проще выполнять управляемую по команде чистку путем уменьшения погрешности перемещения в целевое положение, поскольку устройство 10 может точнее определять свое положение благодаря использованию верхнего изображения, имеющего меньшее разнообразие установленных элементов.
Выше проиллюстрированы и описаны предпочтительные варианты выполнения настоящего изобретения. Однако данное изобретение не ограничено указанными вариантами выполнения, и специалисты в этой области могут внести в него изменения, не выходя за пределы его сущности, изложенной в формуле изобретения.
Изобретения могут быть использованы для чистки при беспроводной связи с внешним устройством и позволяют обеспечить эффективное осуществление управляемой по команде чистки путем простой коррекции траектории перемещения и точного определения текущего положения роботизированного чистящего устройства. Роботизированное чистящее устройство содержит приводной узел для привода колес, расположенную на главном корпусе верхнюю камеру для съемки верхнего изображения перпендикулярно направлению перемещения, и контроллер для управления приводным узлом с обеспечением возможности перемещения роботизированного чистящего устройства в зоне чистки в соответствии с заданной схемой перемещения и коррекции траектории перемещения путем анализа изображения, снимаемого верхней камерой. Роботизированная чистящая система содержит приводной узел для привода колес, роботизированное чистящее устройство, имеющее расположенную на главном корпусе верхнюю камеру для съемки верхнего изображения перпендикулярно направлению перемещения, и дистанционный контроллер для беспроводной связи с указанным чистящим устройством, служащий для управления роботизированным чистящим устройством с обеспечением его перемещения в зоне чистки в соответствии с заданной схемой перемещения и для коррекции траектории перемещения путем анализа изображения, переданного после съемки верхней камерой. Описан способ управления роботизированным чистящим устройством, содержащим верхнюю камеру для съемки верхнего изображения, согласно которому осуществляют создание карты изображения с привязкой к верхней зоне с использованием снимаемого верхней камерой изображения путем перемещения роботизированного чистящего устройства в зоне чистки в соответствии с заданной схемой перемещения, определение положения роботизированного чистящего устройства путем сравнения изображения записанной карты изображения и снимаемого верхней камерой текущего изображения и вычисление траектории перемещения из определенного таким образом положения в целевое положение при получении сигнала чистки, перемещение роботизированного чистящего устройства в соответствии с вычисленной траекторией перемещения. В варианте способа управления роботизированным чистящим устройством, содержащим верхнюю камеру для съемки верхнего изображения, при установлении режима составления карты зоны чистки осуществляют создание карты зоны чистки путем перемещения роботизированного чистящего устройства в указанной зоне и сохранение этой карты в памяти, вычисление траектории перемещения в соответствии с заданным порядком чистки при получении сигнала чистки, перемещение роботизированного чистящего устройства в соответствии с вычисленной траекторией перемещения и коррекцию траектории его перемещения путем анализа изображения, снимаемого верхней камерой. 4 с. и 13 з.п.ф-лы, 9 ил.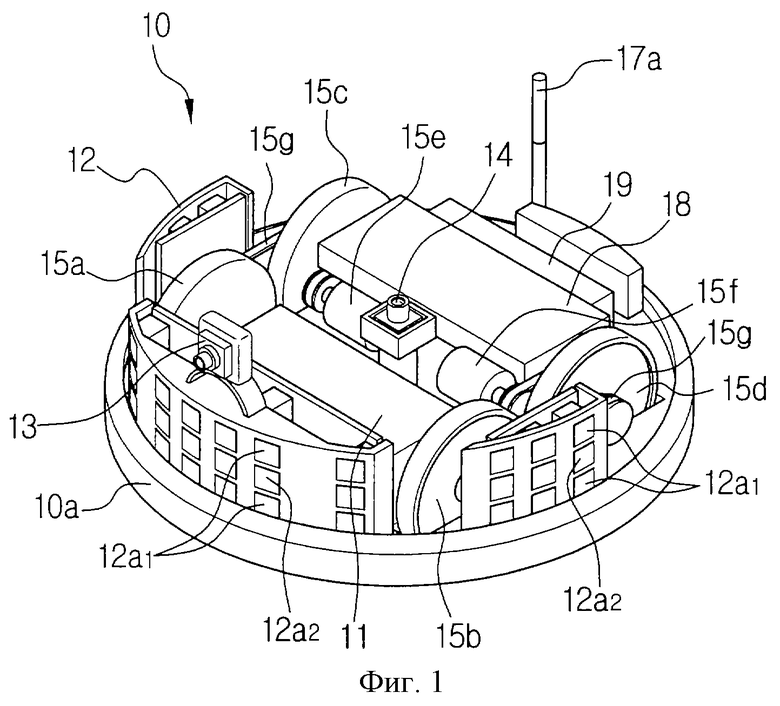
| DE 4340771 A1, 15.12.1994 | |||
| JP 11042467 А, 16.02.1999 | |||
| KR 20000002483 А, 15.01.2000 | |||
| US 5534762 А, 09.07.1996 | |||
| СПОСОБ ДООПЕРАЦИОННОГО ПРОГНОЗИРОВАНИЯ МАКУЛЯРНОГО ОТЕКА У БОЛЬНЫХ САХАРНЫМ ДИАБЕТОМ В МИКРОХИРУРГИИ КАТАРАКТЫ | 2007 |
|
RU2344748C1 |
| ПЫЛЕСОС С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2127997C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЖЕЛЕЗНЫХ ПОРОШКОВ | 0 |
|
SU378298A1 |
| DE 19916427 A1, 16.03.2000. | |||
