Область техники, к которой относится изобретение
Настоящее изобретение относится к снижению нагрузок на конструкцию летательного аппарата. В частности, изобретение касается способа, позволяющего ограничить нагрузки на крыло во время бокового крена на виражах.
Изобретение касается также устройства, позволяющего предугадать реакцию летательного аппарата на выполнение команды маневра, в частности, в момент крена, чтобы снизить нагрузки на конструкцию, в частности на крыло.
Уровень техники
Различные части конструкции летательного аппарата выполняются так, чтобы выдерживать определенные нагрузки без появления остаточных деформаций.
Подобные нагрузки могут возникнуть при разнообразных маневрах самолета; в частности, они могут превышать нормальные нагрузки при входе летательного аппарата в зону повышенной турбулентности, из-за ошибок в пилотировании, при экстренных маневрах. Обычно эти превышения по меньшей мере частично учитываются при проектировании различных элементов конструкции летательного аппарата, чтобы задать безопасные допустимые уровни нагрузок.
В частности, для военных самолетов диапазон совершаемых маневров часто больше, чем у невоенных: полет на низкой высоте, бреющий полет, маневр наподобие уклонения от боя и т.д. При конструировании военного самолета было установлено, что определяющим параметром при расчете размеров крыльев следует считать угол крена. Действительно, вышеперечисленные маневры осуществляют при углах крена, которые могут в два раза превышать допустимый угол крена гражданского транспортного самолета; нагрузка, действующая на конструкцию, в частности изгибающий момент в корневой части крыла, значительно больше, чем при обычном полете.
Кроме того, все чаще встречающееся использование законцовок крыла «винглет» для самолетов, которые до сих пор их не имели, тоже может привести к росту нагрузок на крылья при классических виражах с креном. Поэтому угол крена необходимо учитывать также при расчете размеров конструкции в гражданских самолетах, в частности для конца крыла.
До настоящего времени характеристики перегрузок по отношению к размерности являлись предметом контроля после изготовления самолета. Так, обычно превышения нагрузки обнаруживают путем измерения параметра, в частности, скорости: для различных скоростей, определяемых при помощи специальных моделей нагрузки в каждой секции летательного аппарата, включается предупреждающий сигнал, когда обнаруживается превышение допустимой скорости, например в четыре узла. Усовершенствованный способ обнаружения перегрузки описан в патентной заявке FR 2864032, в котором кроме скорости самолета учитывается также фактор вертикальной нагрузки для обнаружения превышения определенной нагрузки для данного элемента конструкции самолета.
Однако эти способы применяют уже после того, как совершилось действие к местному превышению допустимой нагрузки; они позволяют просто сигнализировать о необходимости произвести технический осмотр летательного аппарата, чтобы проверить целостность конструкции после каждой перегрузки.
Чтобы учитывать различные параметры и ограничить включение сигналов о превышении нагрузки, можно увеличить размеры крыла, например, принимая во внимание изгибающий момент, возникающий при слишком большом угле крена. Однако прямым следствием такого решения является увеличение массы крыла и, следовательно, массы самолета, что приводит к ухудшению его характеристик.
Раскрытие изобретения
Задачей настоящего изобретения является устранение недостатков, связанных с проектированием крыла летательного аппарата в зависимости от условий его работы.
В целом задачей настоящего изобретения является снижение некоторых нагрузок на крыло во время крена для исключения необходимости увеличения размеров крыла путем учета этих нагрузок на виражах с креном.
В связи с этим одним из объектов настоящего изобретения является способ, позволяющий снизить нагрузки, связанные с управляющим параметром, в частности с углом крена. Сначала параметр сравнивают с пороговым значением, которое может составлять, например, 70% от управляющего параметра, создающего максимально допустимую нагрузку или приводящего к максимально допустимому управляемому крену. Если параметр меньше порогового значения, применяемая команда управления соответствует этому параметру: она идентична этому параметру или может быть отфильтрована фильтром нижних частот в зависимости от требуемой степени реагирования в начале маневра. Как только параметр превышает пороговое значение, разность фильтруется фильтром нижних частот и добавляется к команде управления, соответствующей пороговому значению. Таким образом, происходит ослабление командного сигнала, что позволяет предупредить превышение максимально допустимой нагрузки. Предпочтительно, если команда управления соответствует фильтрованию параметра до порогового значения, это фильтрование осуществляется с постоянной времени, меньшей постоянной времени фильтра, используемого для разности.
Другим объектом настоящего изобретения является устройство для осуществления такого способа. Устройство содержит средства для определения управляющего параметра. В частности, средства, взаимодействующие с системой управления, позволяющей передавать команду управления от органа управления, например от ручки управления летательным аппаратом, на управляемый руль (или несколько рулей), такой как интерцептор или элерон самолета. Устройство дополнительно содержит средства для вычисления разности между определенным параметром и пороговым значением. Устройство оборудовано первым фильтром нижних частот для фильтрования этой разности, если она является положительной. Оно может быть оборудовано вторым фильтром нижних частот для фильтрования либо остаточного порогового значения, либо управляющего параметра, если вышеуказанная разность является отрицательной. Устройство содержит средства для определения применяемой команды управления, которая соответствует сумме предыдущих значений.
Краткое описание чертежей
Отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера, со ссылками на прилагаемые чертежи.
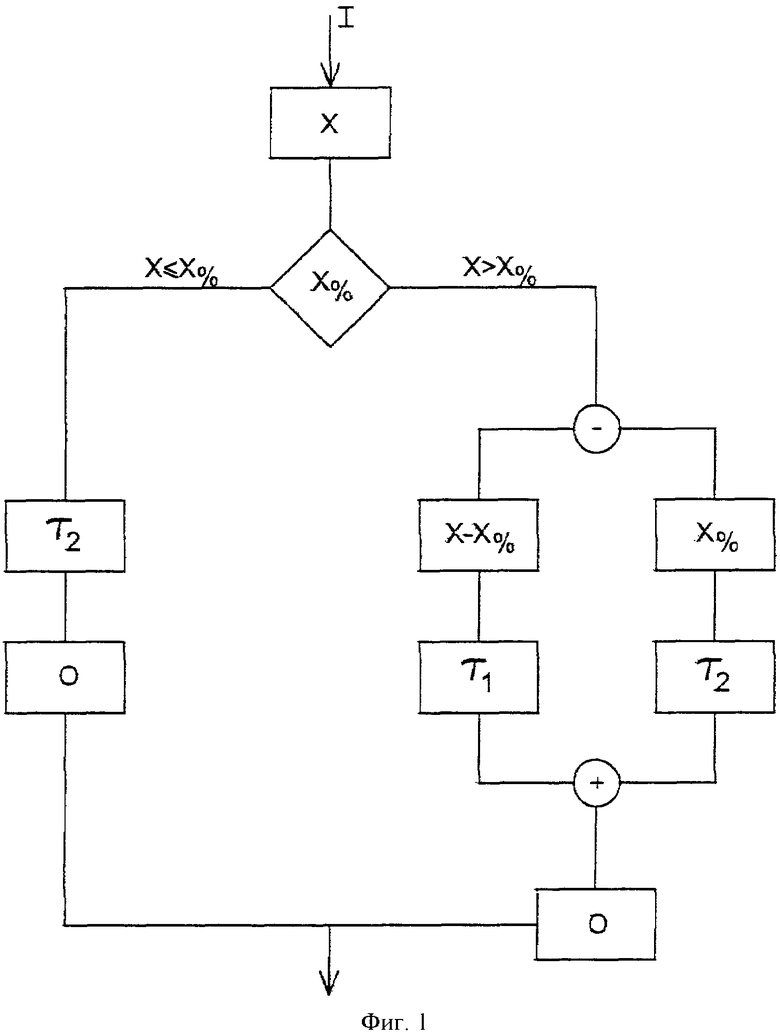
На фиг.1 показана функциональная диаграмма способа в соответствии с настоящим изобретением;
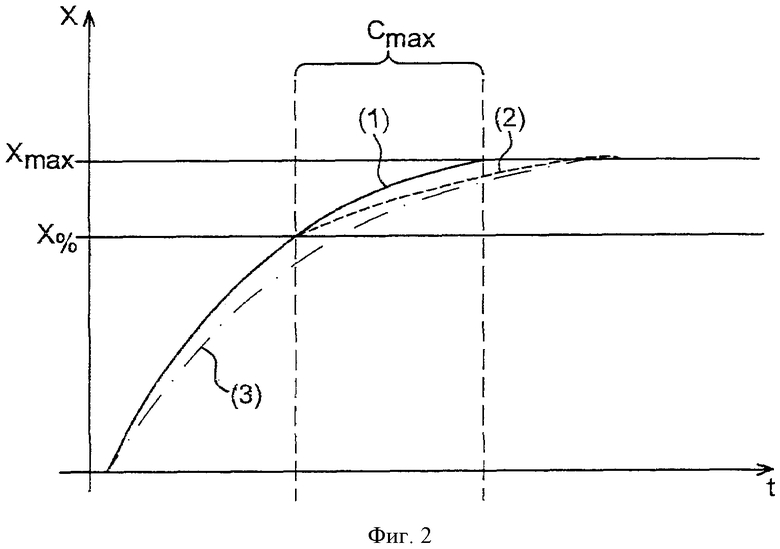
на фиг.2 показана схема нагрузок, появляющихся в результате выполнения команды, крен в зависимости от времени в обычных условиях (1) и согласно двум вариантам осуществления изобретения (2, 3);
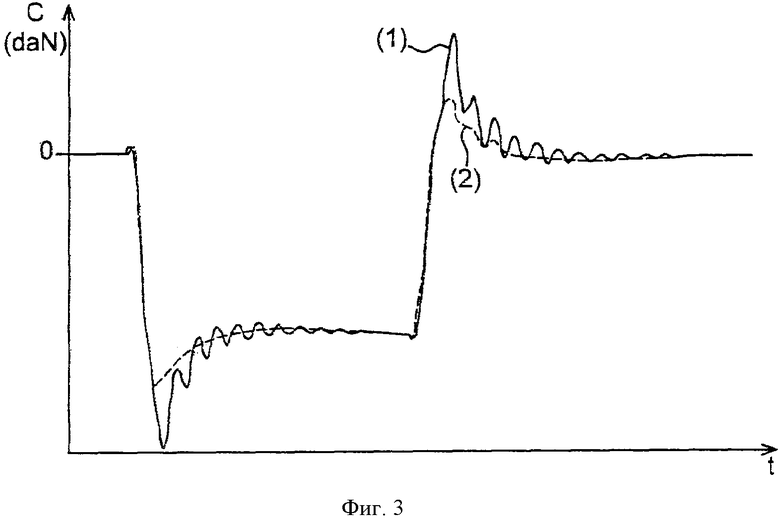
на фиг.3 показан изгибающий момент, действующий на крыло во время классического виража с креном в нормальных условиях (1) и с фильтрованием в соответствии с настоящим изобретением (2).
Осуществление изобретения
Настоящее изобретение применимо для любого летательного аппарата, оборудованного электрической системой управления полетом, в частности, с функциональной связью между органом, позволяющим управлять креном в самолете, и рулями крена. Обычно и предпочтительно органом управления креном является ручка управления самолетом, а рули управления содержат элероны и/или воздушный тормоз, находящийся на крыле и называемый интерцептором.
Как выяснилось, пик максимальной нагрузки на крыло возникает в совершенно конкретный момент маневра виража, то есть когда реакция самолета на данную команду, подаваемую пилотом при помощи ручки управления, достигает определенного значения в процентном выражении от максимальной команды, соответствующей команде, создающей пик максимальной нагрузки с учетом размеров конструкции. Для военного самолета пик максимальной нагрузки может появляться при 70-100% от подаваемой максимальной команды, выраженной углом крена.
Зная реакцию самолета на выполнение команды при крене, можно, таким образом, предотвратить превышение максимальной нагрузки и повлиять на передаваемую команду в момент, когда нагрузка, действующая на крыло, становится равной максимальной нагрузке, на которую рассчитано крыло, или немного раньше, чем эта нагрузка будет превышена. Это действие, естественно, приводит к небольшим ухудшениям характеристик самолета, но зато позволяет ограничить нагрузку на крыло уровнем, меньшим или равным допустимой максимальной нагрузке, что позволяет избежать соответствующих повреждений конструкции и последующего ремонта.
Таким образом, как показано на фиг.1 и 2, команда крена X, подаваемая органом управления креном летательного аппарата, измеряется устройством, соединенным с системой управления полетом. Это измерение происходит в непрерывном режиме или с равными интервалами, например от 10 мс до 50 мс.
Кроме того, команда максимального крена (предел Хmах на фиг.2), как правило, определена требованиями характеристик, зафиксированными в техническом паспорте самолета. Вместе с тем, именно в районе этого значения Хmах нагрузка С, действующая на крыло, достигает своего максимального уровня или превышает максимальную нагрузку Сmах, которую можно прикладывать, не опасаясь повреждений.
В непрерывном режиме или предпочтительно с интервалами от 10 до 50 мс измеренную команду крена сравнивают с пороговым значением Х%. Это пороговое значение определяют заранее в зависимости от самолета и от условий его применения (в частности, для военных или гражданских целей), чтобы применять способ снижения нагрузок, как только достигнутый уровень нагрузки потребует снижения. Обычно оно соответствует определенному значению в процентном выражении от предела Хmах, например 70% для военного самолета.
Пока команда крена Х является меньшей или равной пороговому значению Х%, команду Х можно применять, так как еще не предвидится никакого превышения расчетной нагрузки на крыло.
Когда команда крена Х становится больше порогового значения Х%, согласно изобретению предусматривается ослабление этой команды. В частности, вычисляется разность между командой Х и пороговым значением Х%, и результат фильтруется первым фильтром нижних частот с постоянной τ1. Командный сигнал О, подаваемый на рули управления креном, является в этом случае суммой этой отфильтрованной разности и команды, соответствующей пороговому значению Х%. По сравнению с классической не фильтрованной командой X, показанной на кривой (1) на фиг.2, происходит ослабление командного сигнала, реально действующего на конструкцию, и превышение максимальной нагрузки Сmах упреждается благодаря изменению команды X, подаваемой в момент, когда нагрузка С, действующая на крыло, становится больше максимальной нагрузки Сmах, или немного раньше - кривая (2).
Кроме того, как показано на кривой (3), можно также предотвратить превышение расчетной нагрузки и произвести фильтрование команды крена Х в любой момент. Так, даже если параметр Х не достигает порогового значения Х% команда крена соответствует параметру X, отфильтрованному фильтром нижних частот со второй постоянной времени τ2: таким образом, предугадывается реакция самолета и нагрузка на крыло задерживается по времени. В связи с требованиями соблюдения характеристик в этом случае предпочтительно, чтобы вторая постоянная времени была меньше первой постоянной: τ1≥τ2.
Выбор параметров изменения команды, то есть Х%, τ1, τ2 оптимизируют для соблюдения требования технического паспорта самолета по его характеристикам. Например, для гражданского транспортного самолета (кривая (3) на фиг.2) нет необходимости, чтобы реакция самолета на команду крена, подаваемую пилотом, мгновенно следовала команде, и фильтр нижних частот может иметь постоянную времени τ2, не равную нулю. Например, для самолета, характеристики которого могут допускать короткую задержку в дополнение к задержке получения командного сигнала рулями управления от начала подачи команды, пороговое значение Х% может составлять примерно 70% при τ1=1,2 с и τ2=0,1 с.
Однако для военного транспортного самолета (пример показан на кривой (2)), который требует реакции, очень близкой к команде, предпочтительно выбирать τ2, равную нулю, то есть соответствующий фильтр нижних частот не используется, чтобы пилот ощущал реакцию самолета непосредственно при команде крена и чтобы в начале маневра не происходило никакого добавления задержки к сигналу управления. Ограничение происходит только тогда, когда команда крена Х становится больше порогового значения Х%. Для самолета, характеристики которого являются оптимальными в начале команды, значения могут, таким образом, составлять Х%=0,7·Xmax, τ2=0, τ1=0,6 с, что позволяет осуществить снижение нагрузки на крыло порядка 17% по изгибающему моменту, что соответствует существенному выигрышу в массе. Результат применения способа в соответствии с настоящим изобретением при этих значениях Х%=0,7·Хmах, τ2=0, τ1=0,6 с) показан, например, на кривой (2) на фиг.3 для военного самолета во время команды крена при Хmах, и для сравнения показана кривая (1), отражающая нормальные нагрузки при этой же процедуре.
Точно так же, как характеристики в начале маневра зависят от постоянной времени τ2, можно изменять τ1, чтобы улучшить снижение нагрузки в процентном выражении за счет снижения маневренности самолета. По сути дела, различные параметры тесно связаны с установками алгоритмов управления, загруженных в вычислительные устройства самолета с электрической системой управления, и с предусмотренными критериями эксплуатации: при этом достигается приемлемый компромисс между снижением нагрузки и маневренностью.
Для снижения боковых нагрузок на виражах с креном настоящим изобретением предлагается, таким образом, вводить правило управления в командные сигналы, подаваемые от ручки управления, путем включения специального алгоритма снижения нагрузки между органами управления креном и сервомеханизмами управления поворотами, что позволяет получить выигрыш в массе конструкции за счет управляемого снижения нагрузки.
Настоящее изобретение описано в варианте применения для снижения момента, действующего на корневую часть крыла во время совершения крена в результате команды, подаваемой на орган управления самолетом, однако способ применим для любого другого органа управления, если это позволяет снизить нагрузки, действующие на элемент самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ПРИ ОТКАЗЕ ДВИГАТЕЛЯ | 2014 |
|
RU2562673C1 |
| Способ обеспечения вихревой безопасности летательного аппарата | 2021 |
|
RU2774083C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СКОЛЬЖЕНИЯ | 2020 |
|
RU2759370C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
Изобретение относится к способу и устройству для снижения нагрузок на конструкцию летательного аппарата. Способ включает сравнение параметра с пороговым значением параметра. Если параметр меньше или равен пороговому значению, подают сигнал, соответствующий параметру команды. Если параметр превышает пороговое значение, то разность между параметром и пороговым значением фильтруют и подают сигнал, соответствующий сумме отфильтрованной разности и значения команды, соответствующего пороговому значению. Устройство содержит средства для определения параметра команды, средства для вычисления разности между параметром команды и пороговым значением параметра команды, фильтр нижних частот, средства для определения командного сигнала. Технический результат заключается в снижении нагрузки на конструкцию летательного аппарата. 2 н. и 10 з.п. ф-лы, 3 ил.
1. Способ снижения нагрузок (С) на элемент конструкции летательного аппарата, обусловленных параметром команды (X), включающий следующие этапы: параметр (X) сравнивают с пороговым значением (Х%) этого параметра, если параметр меньше или равен пороговому значению (Х≤X%), на орган управления подают командный сигнал, соответствующий параметру команды (X), а если параметр превышает пороговое значение (Х>Х%), то разность (Х-Х%) между параметром и пороговым значением фильтруют при помощи фильтра нижних частот с первой постоянной времени (τ1), а на орган управления подают команду управления, соответствующую сумме отфильтрованной разности и командного сигнала, соответствующего пороговому значению (Х%).
2. Способ по п.1, в котором командный сигнал, соответствующий параметру команды (X), представляет собой параметр команды (X), отфильтрованный фильтром нижних частот со второй постоянной времени (τ2), а командный сигнал, соответствующий пороговому значению (Х%), представляет собой пороговое значение (Х%), отфильтрованное фильтром нижних частот со второй постоянной времени (τ2).
3. Способ по п.2, в котором вторая постоянная времени меньше первой постоянной времени (τ2≤τ1).
4. Способ по любому из пп.1-3, в котором параметром команды (X) является угол крена.
5. Способ по любому из пп.1-3, в котором пороговое значение (Х%) меньше 100% команды, соответствующей максимальной допустимой нагрузке (Cmax).
6. Способ по п.4, в котором пороговое значение (Х%) меньше 100% команды, соответствующей максимальной допустимой нагрузке (Сmах).
7. Устройство снижения нагрузки, возникающей в результате выполнения команды, на элемент конструкции летательного аппарата, содержащее средства для определения параметра команды (X), средства для вычисления разности между параметром команды и пороговым значением параметра команды (Х-Х%), первый фильтр нижних частот (τ1) для фильтрования вычисленной разности, если она является положительной, средства для определения командного сигнала, который соответствует параметру команды (X), если вычисленная разность является отрицательной, и который равен сумме отфильтрованной разности и командного сигнала, соответствующего пороговому значению, если разность является положительной.
8. Устройство по п.7, содержащее второй фильтр нижних частот (τ2), выполненный с возможностью определения командного сигнала, соответствующего значению (X, Х%), посредством фильтрования.
9. Устройство по любому из пп.7 или 8, содержащее систему управления, выполненную с возможностью подачи командного сигнала на руль управления.
10. Устройство по п.9, в котором система управления выполнена электрической и связанной со средствами для определения параметра команды.
11. Устройство по п.9, в котором система управления связана с органом управления, таким как ручка управления летательным аппаратом, и с рулем управления, таким как элерон летательного аппарата.
12. Устройство по п.10, в котором система управления связана с органом управления, таким как ручка управления летательным аппаратом, и с рулем управления, таким как элерон летательного аппарата.
| US 4796192 А, 03.01.1989 | |||
| US 4638229 А, 20.01.1987 | |||
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| Устройство для уменьшения вибраций крыла летательного аппарата | 1983 |
|
SU1512494A3 |

