Изобретение относится к области станкостроения - устройствам ступенчатого изменения частоты и направления вращения механизмов станков и других изделий, требующих ступенчатого изменения частоты и направления вращения и имеющих бесконечный гибкий передаточный элемент - ремень или цепь, для передачи вращения на исполнительный или промежуточный вал изделия, например шпиндель станка.
Известны устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, содержащие бесконечный гибкий элемент, предназначенный для взаимодействия со шкивами или звездочками, установленными на выходном валу устройства и шпинделе, муфты и шестерни (см. Брон Л.С. и др. "Конструкции, наладка и эксплуатация агрегатных станков и автоматических линий", изд. 4-е, М., "Высшая школа", 1985 г., стр. 112, 113, рис. 129).
Выполненное по указанной кинематической схеме устройство для ступенчатого изменения частоты и направления вращения имеет следующие недостатки:
- сложность кинематической цепи;
- большие потери мощности на холостом ходу;
- сложность изготовления зубчатых колес;
- повышенный шум.
Задачей предлагаемого изобретения является устранение указанных недостатков и повышение экономичности устройства.
Указанная задача достигается следующим способом.
Устройство ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, содержащее бесконечный гибкий элемент в виде ремня или цепи, предназначенный для взаимодействия соответственно со шкивами или звездочками, установленными на выходных валах устройства, и шкивом или звездочкой, расположенными на шпинделе, муфты, соединяющие шкивы или звездочки с валами, снабжено дополнительными входными валами, на которых расположены шкивы или звездочки, предназначенные для взаимодействия бесконечного гибкого элемента в виде ремня или цепи со шкивом или звездочкой привода, при этом для изменения направления вращения последних бесконечный гибкий элемент в виде ремня или цепи выполнен с возможностью взаимодействия своей наружной стороной со шкивом или звездочкой, расположенными на дополнительном валу устройства.
Устройство отличается также тем, что для изменения частоты вращения шкива или звездочки, расположенных на шпинделе, бесконечный гибкий элемент в виде ремня или цепи выполнен с возможностью взаимодействия своей внутренней стороной с заданным шкивом или звездочкой, расположенными на выходных валах устройства.
Отличительными признаками предлагаемого изобретения является то, что изменение частоты вращения осуществляется без применения зубчатых колес, а направление вращения - без паразитного зубчатого колеса.
Неизвестны решения той же задачи, близкие по своей технической сущности к заявленному. Отсутствие таких сведений при просмотре патентно-информационных источников по станкам свидетельствует о том, что заявляемое решение отвечает условию "изобретательский уровень".
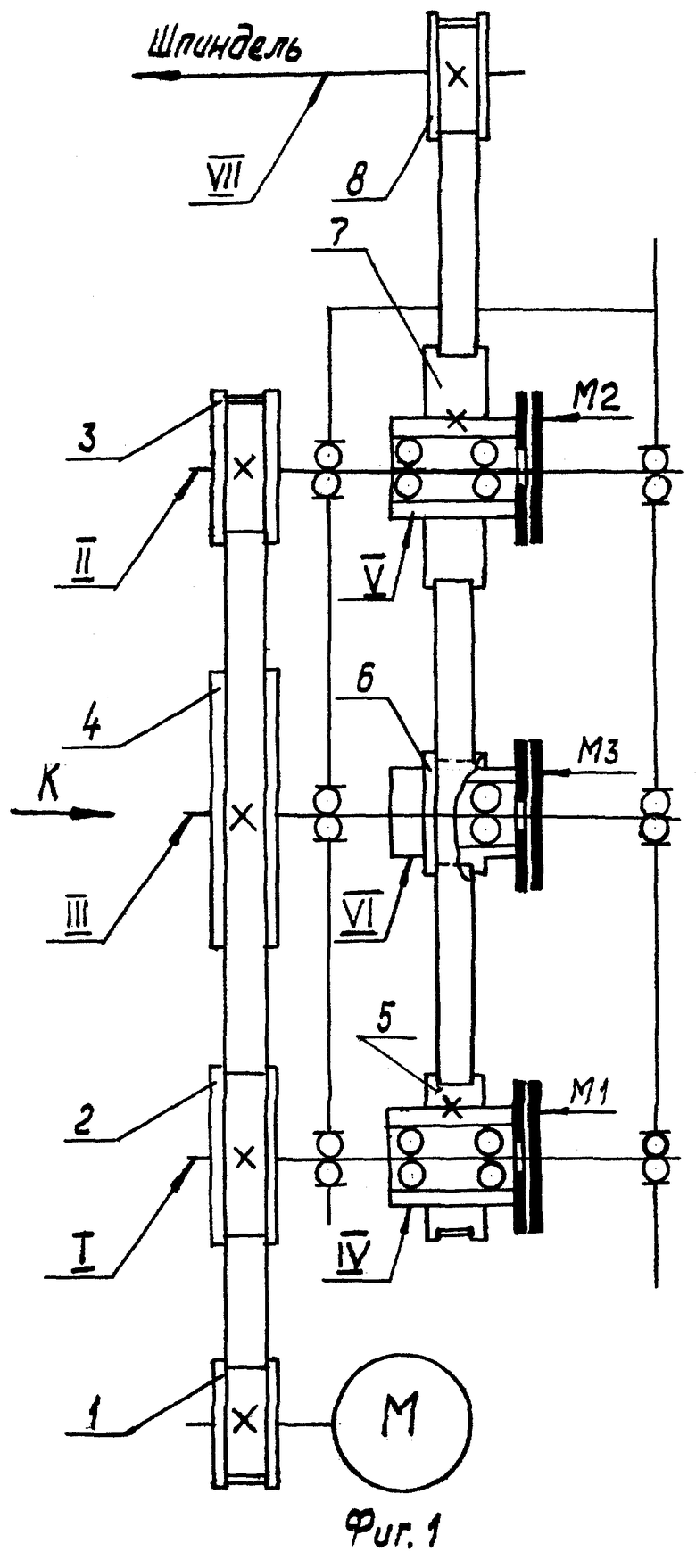
На фиг.1 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата.
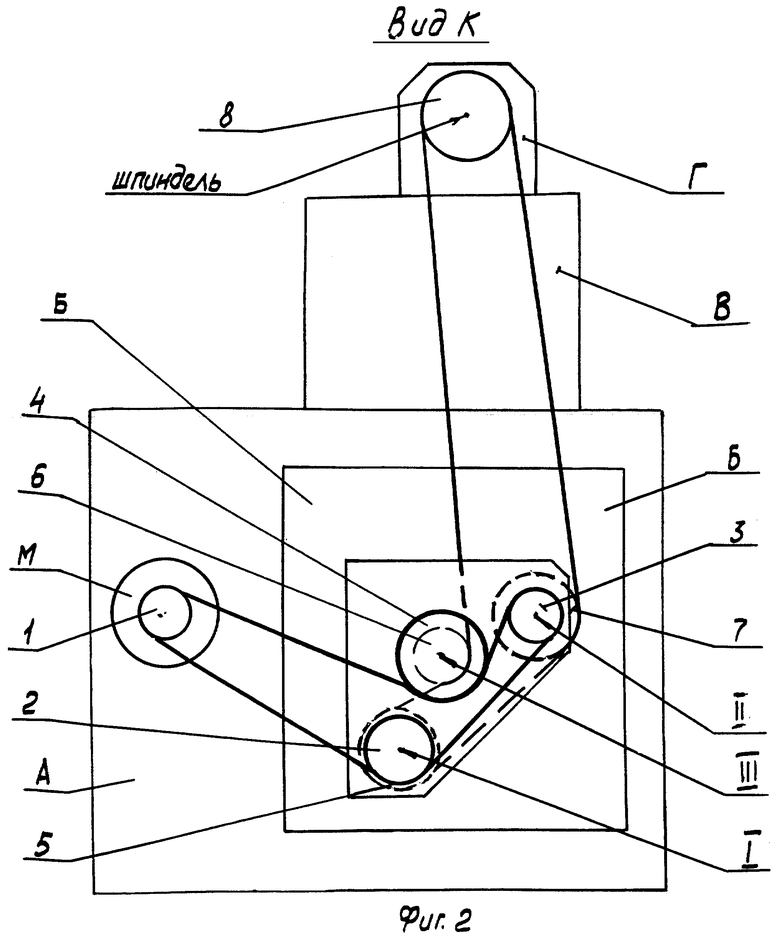
На фиг.2 изображена та же кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - вид К на фиг.1.
На фиг.3 изображена кинематическая схема устройства ступенчатого изменения направления вращения шпинделя токарного автомата.
На фиг.4 изображена та же кинематическая схема устройства ступенчатого изменения направления вращения шпинделя токарного автомата - вид N на фиг.3.
На фиг.2 изображена кинематическая схема, вид по стрелке К.
К основанию станка А крепятся:
М - двигатель, который может иметь устройство для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 1, 2, 3, 4 устройства;
Б - корпус устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, который может иметь возможность для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 5, 6, 7 со шкивом или звездочкой шпинделя 8.
В корпусе или на плите с фланцами установлены входные валы I, II, III, на входе которых закреплены шкивы 2, 3 и 4, соединяющиеся посредством бесконечного гибкого элемента, например ремня или цепи, со шкивом или звездочкой 1, расположенными на валу приводного двигателя М.
На входных валах I, II, и III установлены подшипники, на которых расположены полые (или выполненные совместно со шкивами) валы IV, V и VI. На полых валах IV, V и VI закреплены (или выполнены совместно с валами) шкивы 5, 6 и 7, соединяющиеся посредством бесконечного гибкого передающего элемента, например ремня или цепи, со шкивом 8, расположенным на исполнительном валу VII; например, шпинделе токарного автомата;
В - станина, к которой крепится шпиндельная бабка Г с расположенным в ней шпинделем токарного автомата.
Работа осуществляется следующим образом: вращение двигателя М, на валу которого расположен шкив или звездочка 1, посредством бесконечного гибкого передающего элемента, например ремня или цепи, передается на шкивы или звездочки 2, 3 и 4, расположенные (или выполненные совместно с валами) соответственно на входных валах I, II, и III. С входными валами I, II, и III зацеплены диски муфт M1, M2 и МЗ, включение которых позволяет передавать вращение на валы IV, V и VI, где расположены шкивы 5, 6 и 7, посредством бесконечного гибкого передающего элемента, например ремня или цепи, соединены со шкивом 8, расположенным на исполнительном валу VII, например шпинделе станка, вследствие чего при включении муфты M1 вращение на шкив 8 передается со шкива 5 внутренней стороной ремня или цепи (прямое вращение), при включении муфты M2 со шкива 7 внутренней стороной ремня или цепи (прямое вращение), а при включении муфты М3 со шкива 6 на шкив 8 наружной стороной ремня или цепи передается обратное вращение.
На фиг.3 изображена кинематическая схема устройства ступенчатого изменения направления вращения шпинделя токарного автомата. На фиг.4 изображена та же кинематическая схема, вид по стрелке N.
К основанию станка А крепятся:
М - двигатель, который может иметь устройство для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего между расположенными на валу двигателя шкивом или звездочкой 1, со шкивами или звездочками 2 и 3, расположенными на валах I и II устройства;
Б - корпус устройства ступенчатого изменения направления вращения шпинделя токарного автомата, который может иметь возможность для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 4 и 5 устройства, со шкивом или звездочкой 6, расположенной на шпинделе. В корпусе или на плите с фланцами, установлены входные валы I и II, на входе которых смонтированы (или выполнены совместно с валами) шкивы или звездочки 2 и 3, соединяющиеся посредством бесконечного гибкого передающего элемента, например ремня или цепи, со шкивом или звездочкой 1, расположенным на валу приводного двигателя М. На входных валах I и II установлены подшипники, на которых расположены полые валы III и IV. На полых валах III и IV закреплены (или выполнены совместно с валами) шкивы или звездочки 4 и 5; соединяющиеся посредством бесконечного гибкого элемента, например ремня или цепи, со шкивом или звездочкой 6, расположенным на исполнительном валу, например шпинделе токарного автомата.
В - станина, к которой крепится шпиндельная бабка Г с расположенным в ней шпинделем токарного автомата V.
Работа осуществляется следующим образом:
вращение двигателя М, на валу которого расположен шкив или звездочка 1, посредством бесконечного гибкого элемента, например ремня или цепи, передается на шкивы или звездочки 2 и 3, расположенные соответственно на входных валах I и II устройства. С входными валами I и II зацеплены диски муфт M1 и М2, включение которых позволяет передавать вращение на полые валы III или IV, где расположены (или выполнены заодно с валами) шкивы или звездочки 4 и 5. Шкивы или звездочки 4 и 5, посредством бесконечного гибкого элемента, например ремня или цепи, соединены со шкивом или звездочкой 6, расположенными на исполнительном валу V, например шпинделе станка, вследствие чего при включении муфты М2 вращение на шкив или звездочку 6 передается от шкива или звездочки 5, при этом ремень или цепь взаимодействует со шкивами или звездочками 5 и 6 своей внутренней стороной (прямое вращение), а при включении муфты M1 со шкива или звездочки 4 на шкив или звездочку 6 бесконечный гибкий элемент, ремень или цепь взаимодействует с ними своей наружной стороной, в результате чего получаем обратное вращение.
Технико-экономической эффективностью предложенного устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, а также его варианта, т.е. только для изменения направления вращения фиг.3 является:
- уменьшение количества кинематических цепей для получения того же количества заданных частот и направлений вращения (в т.ч. и их вариантов);
- снижение мощности холостого хода;
- уменьшение времени и количества выделяемого тепла при переходных процессах;
- повышение надежности и ремонтопригодности;
- снижение уровня шума;
- уменьшение стоимости.
Опытные образцы устройства ступенчатого изменения частоты вращения прошли лабораторные и производственные испытания. Результаты положительные.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТУПЕНЧАТОГО ИЗМЕНЕНИЯ ЧАСТОТЫ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ ШПИНДЕЛЯ ТОКАРНОГО АВТОМАТА | 1999 |
|
RU2155652C1 |
| Токарный автомат | 1970 |
|
SU352711A1 |
| Токарный автомат продольного точения с зубофрезерным приспособлением | 1979 |
|
SU1038075A1 |
| Устройство для доворота и индексации шпинделя в различных угловых положениях | 1982 |
|
SU1047652A1 |
| Привод шпинделя для вибрационного резания | 1986 |
|
SU1366313A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1980 |
|
SU869919A1 |
| Токарный автомат | 1980 |
|
SU884897A2 |
| ШПИНДЕЛЬНАЯ БАБКА МЕТАЛЛОРЕЖУЩЕГО СТАНКА С ТОРМОЗНЫМ УСТРОЙСТВОМ ШПИНДЕЛЯ | 1992 |
|
RU2035264C1 |
| Станок для навивки бесконечных многопроволочных спиралей | 1985 |
|
SU1266624A1 |


Изобретение относится к области станкостроения, токарным станкам. Устройство содержит бесконечный гибкий элемент в виде ремня или цепи, предназначенный для взаимодействия соответственно со шкивами или звездочками, установленными на выходных валах устройства, и шкивом или звездочкой, расположенными на шпинделе, муфты, соединяющие шкивы или звездочки с валами. Для упрощения кинематической цепи, снижения потери мощности на холостом ходу и шума и упрощения изготовления зубчатых колес оно снабжено дополнительными входными валами, на которых расположены шкивы или звездочки, предназначенные для взаимодействия бесконечного гибкого элемента в виде ремня или цепи со шкивом или звездочкой привода. При этом для изменения направления вращения последних бесконечный гибкий элемент в виде ремня или цепи выполнен с возможностью взаимодействия своей наружной стороной со шкивом или звездочкой, расположенными на дополнительном валу устройства. Бесконечный гибкий элемент в виде ремня или цепи может быть выполнен с возможностью взаимодействия своей внутренней стороной с заданным шкивом или звездочкой, расположенными на выходных валах устройства. 1 з.п. ф-лы, 4 ил.
| УСТРОЙСТВО СТУПЕНЧАТОГО ИЗМЕНЕНИЯ ЧАСТОТЫ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ ШПИНДЕЛЯ ТОКАРНОГО АВТОМАТА | 1999 |
|
RU2155652C1 |
| Привод к металлообрабатывающим станкам | 1927 |
|
SU9954A1 |
| ЗАМКНУТЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 0 |
|
SU180449A1 |
| ПРИВОД СТАНКА | 1989 |
|
RU2036769C1 |
| Антифрикционный материал преимущественно для контактных вставок токоприемников электроподвижного состава | 1989 |
|
SU1732388A1 |

