Изобретение относится к области станкостроения - устройствам ступенчатого изменения частоты и направления вращения механизмов станков и других изделий, требующих ступенчатого изменения частоты и направления вращения и имеющих бесконечный гибкий передаточный элемент - ремень или цепь для передачи вращения на исполнительный или промежуточный вал изделия, например, шпиндель станка.
Известны устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, содержащие бесконечный гибкий элемент, предназначенный для взаимодействия со шкивами или звездочками, установленными на выходном валу устройства и шпинделе, муфты и шестерни (Брон Л.С. и др. Конструкции, наладка и эксплуатация агрегатных станков и автоматических линий, изд.4-е, М.: Высшая школа, 1985, c. 112, 113, рис. 129).
Указанное устройство имеет следующие недостатки:
- сложность кинематической цепи;
- большие потери мощности на холостом ходу;
- сложность изготовления зубчатых колес;
- повышенный шум.
Задачей предлагаемого изобретения является устранение указанных недостатков и повышение экономичности устройства.
Указанная задача решается следующим образом:
1. Устройство ступенчатого изменения частоты и направления вращения шпинделя токарного автомата содержит бесконечный гибкий элемент, выходной вал, шпиндель, муфты и шестерни и отличается тем, что оно снабжено дополнительным выходным валом, выполненным с возможностью взаимодействия с бесконечным гибким элементом.
2. Устройство по п.1, отличающееся тем, что бесконечный гибкий элемент выполнен в виде ремня или цепи и с возможностью взаимодействия, соответственно, со шкивами или звездочками, установленными на выходных валах и шпинделе.
3. Устройство по п.2, отличающееся тем, что для ступенчатого изменения частоты вращения бесконечный гибкий элемент расположен с возможностью передачи вращения на шпиндель от основного или дополнительного выходных валов.
4. Устройство по п.2, отличающееся тем, что для изменения направления вращения бесконечный гибкий элемент расположен с возможностью передачи вращения на шпиндель от основного или дополнительного выходных валов, соединенных между собой с помощью шестерен.
Отличительными признаками предлагаемого изобретения являются изменение частоты вращения без применения зубчатых колес и изменение направления вращения - без паразитного зубчатого колеса.
Неизвестны решения той же задачи, близкие по своей технической сущности к заявленному. Отсутствие таких сведений при просмотре патентно-информационных источников по станкам свидетельствует о том, что заявленное решение отвечает условию патентоспособности "изобретательский уровень".
Предложенное устройство представлено на фиг. 1 - 7.
На фиг. 1 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - 1-ый вариант.
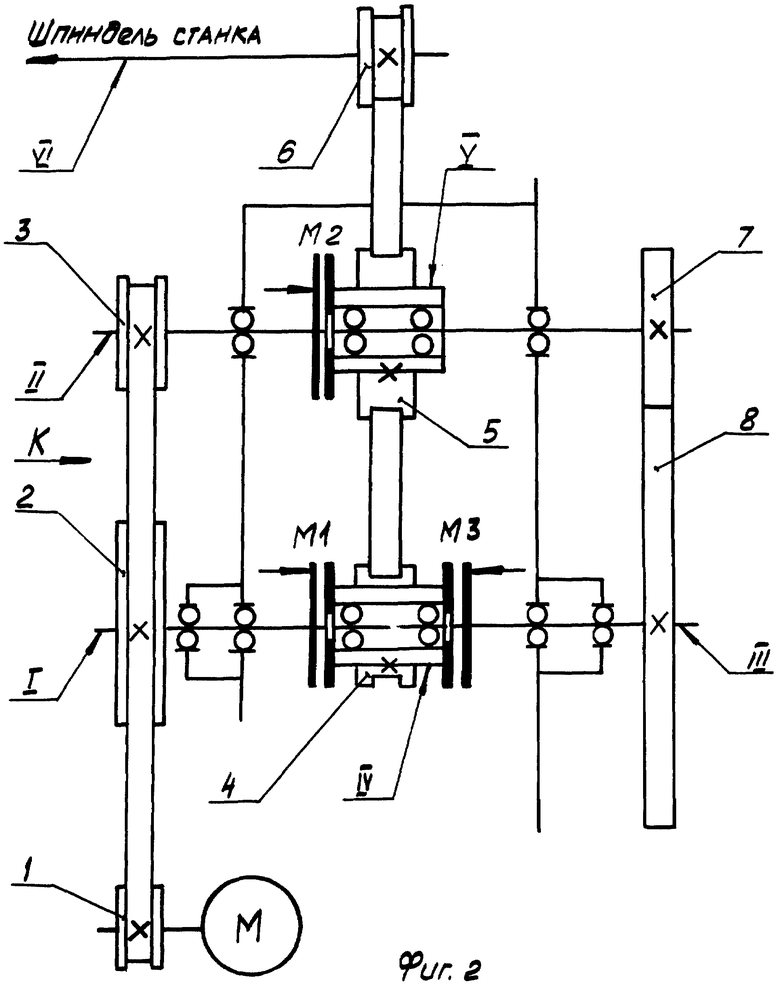
На фиг. 2 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - 2-ой вариант.
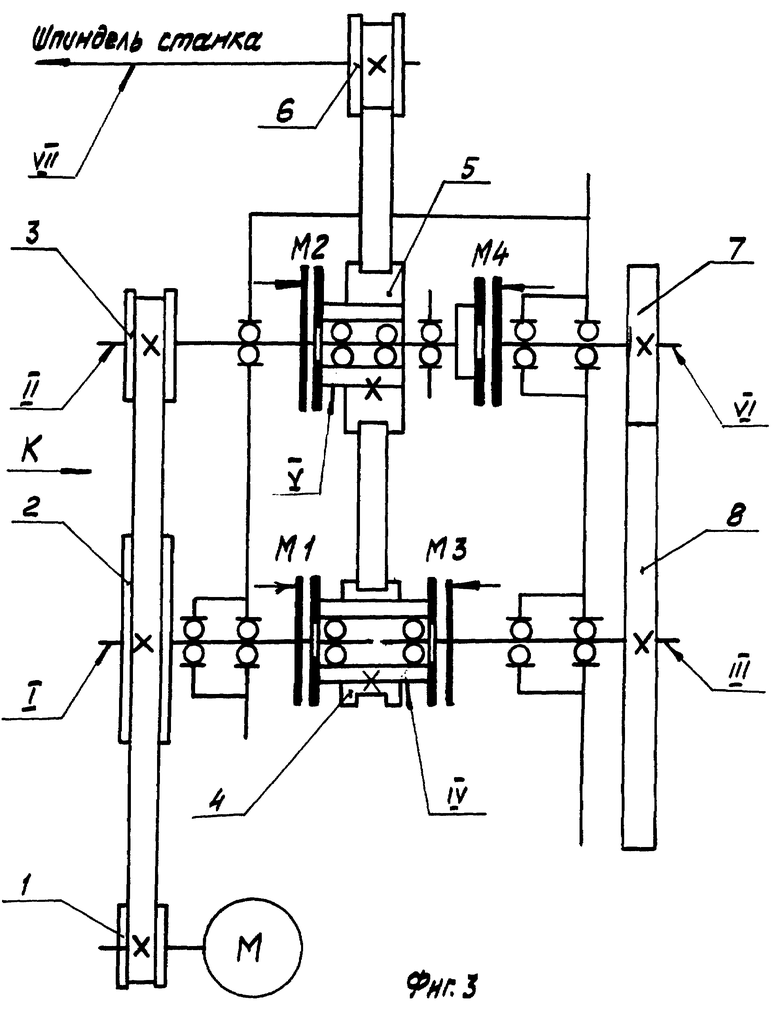
На фиг. 3 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - 3-ий вариант.
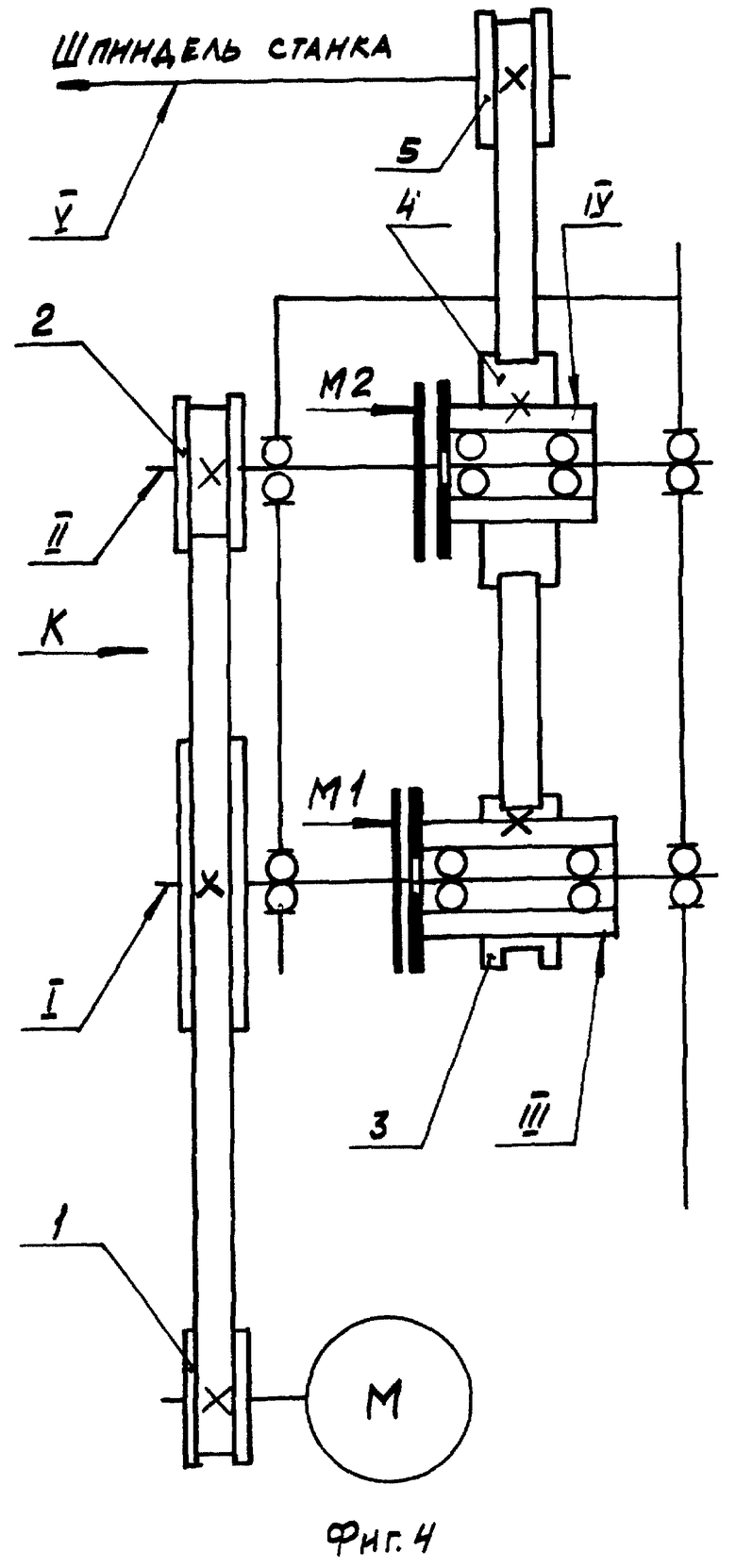
На фиг. 4 изображена кинематическая схема вращения шпинделя токарного автомата.
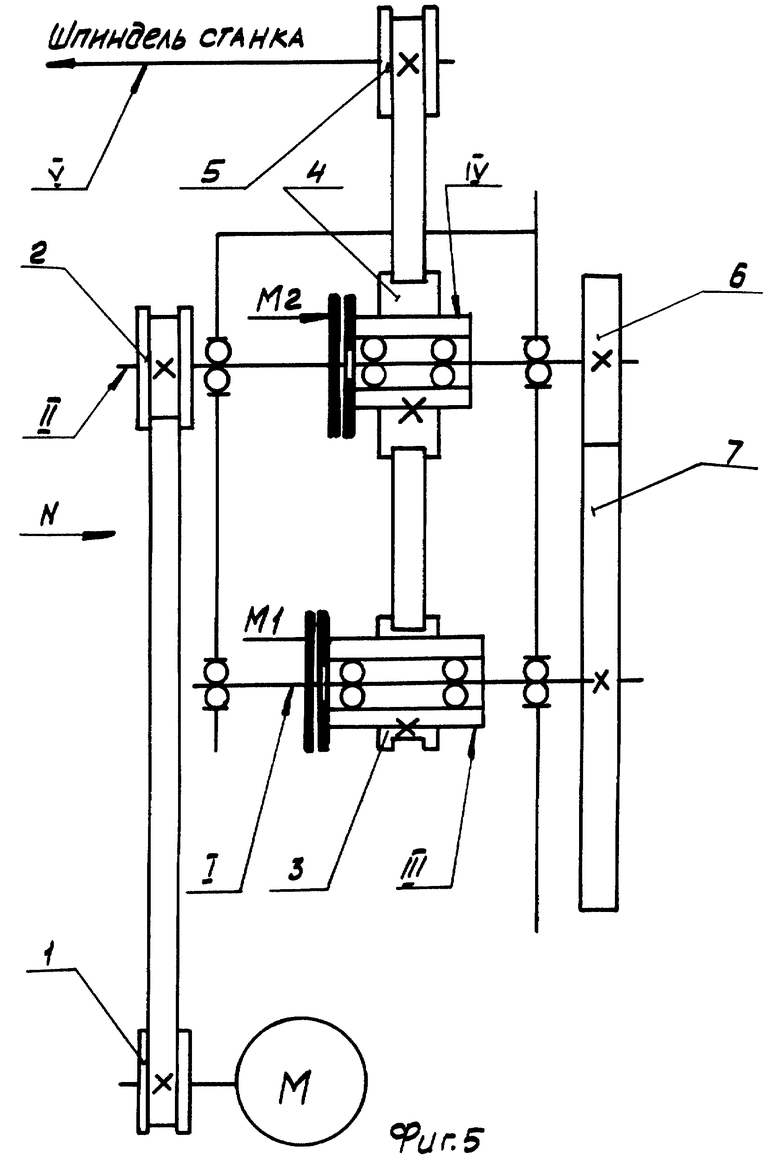
На фиг. 5 изображена кинематическая схема устройства ступенчатого изменения направления вращения шпинделя токарного автомата.
На фиг. 6 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - вид К на фиг.: 1, 2, 3, 4.
На фиг. 7 изображена кинематическая схема устройства ступенчатого изменения направления вращения шпинделя токарного автомата - вид N фигуры 5.
На фиг. 1 изображена кинематическая схема устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата.
В корпусе или на плите с фланцами установлены входные валы I и II, на входе которых закреплены шкивы 2 и 3, соединяющиеся посредством бесконечного гибкого элемента, например, ремня со шкивом 1, расположенном на валу приводного двигателя М.
На входных валах I и II установлены подшипники, на которых расположены полые валы III и IV. На полых валах III и IV закреплены (или выполнены совместно с валами) шкивы 4 и 5, соединяющиеся посредством бесконечного гибкого передающего элемента, например, ремня со шкивом 6, расположенном на исполнительном вале V.
На другом конце вала II закреплена шестерня 7.
На полом валу III (который может быть выполнен совместно со шкивом 4) смонтирована (на подшипниках) шестерня 8, которая соединена дисками (ведущим и ведомыми) муфты М3 с полым валом III.
Работа осуществляется следующим образом.
Вращение двигателя М, на валу которого расположен шкив 1, посредством бесконечного гибкого передающего элемента, например, ремня, передается на шкивы 2 и 3, расположенные соответственно на входных валах I и II. С входными валами I и II зацеплены диски муфт М1 и М2, включение которых позволяет передавать вращение на шкивы 4 и 5. Шкивы 4 и 6, посредством бесконечного гибкого передающего элемента, например, ремня, соединены со шкивом 6, расположенным на исполнительном или промежуточном вале V, например, шпинделе станка, вследствие чего при включении муфты М1 вращение на шкив 6 передается со шкива 4, а при включении муфты М2 со шкива 5.
Таким образом, на исполнительном вале, например, шпинделе станка, получаем две заданные шкивами 1, 2, 3, 4, 5 и 6 частоты вращения (при применении двухскоростного эл. двигателя 4-е частоты вращения). Включением муфты М3 (муфты М1 и М2 отключены) осуществляем передачу вращения с двигателя М - шкив 1 на шкив 3, вал II, шестерню 7 и 8 на полый вал III, со шкива 4, которого, посредством бесконечного гибкого элемента - ремня или цепи, передаем измененное направление вращения на шкив 6 шпинделя V токарного автомата.
Отличительной особенностью кинематической схемы, представленной на фиг. 2, является то, что в разработанных на ее основе конструкциях устройств (коробках передач) для ступенчатого изменения частот и направлений вращения исполнительного вала VI, например, шпинделя станка, входные валы I и II имеют возможность удобной установки на них зубчатых колес 7, 8, что создает экономическую целесообразность сделать их сменными. Это дает возможность получения исполнительным валом VI, например, шпинделя станка, технологически оптимальных частот вращения обратного направления.
В корпусе или плите с фланцами установлены:
- входной вал I, на котором смонтированы: шкив 2, выходной вал IV со шкивом 4 (которые могут быть выполнены совместно), муфта М1, осуществляющая сцепление вала I с валом IV;
- входной вал II, на котором смонтированы: шкив 3, выходной вал V, со шкивом 5 (которые могут быть выполнены совместно), муфта М2, осуществляющая сцепление вала II с валом V, зубчатое колесо 7;
- входной вал III, на котором смонтированы: зубчатое колесо 8, муфта М3, осуществляющая сцепление вала III с валом IV, выходной вал IV.
Шкивы 1, 2, 3 и зубчатые колеса 7, 8 могут быть сменными:
Работа осуществляется следующим способом.
Вращение двигателя М, на валу которого расположен шкив 1, посредством бесконечного гибкого передающего элемента, например, ремня, передается на шкивы 2 и 3, расположенные соответственно на входных валах I и II. С входными валами I и II зацеплены диски муфт М1 и V2, включение которых позволяет передавать вращение на валы IV и V, на которых закреплены или выполнены заодно с валами, шкивы 4 и 5. Шкивы 4 и 5, посредством бесконечного гибкого передающего элемента, например, ремня, соединены со шкивом 6, расположенном на исполнительном вале VI, например, шпинделе станка, вследствие чего при включении муфты М1 вращение на шкив 6 передается со шкива 4, а при включении муфты М2 со шкива 5.
Таким образом, на исполнительном вале VI, например, шпинделе станка, получаем две заданные шкивами 1, 2, 3, 4, 5 и 6 частоты вращения (шкивы 1, 2, 3 могут быть сменными).
Так как зубчатое колесо 7, закрепленное на валу II, взаимодействует с зубчатым колесом 8, закрепленным на валу III, то вал III имеет обратное направление частоты вращения.
Включением муфты М3 происходит зацепление вала III с валом IV, на котором закреплен или выполнен с ним заодно шкив 4, в результате чего обратная частота вращения посредством бесконечного гибкого элемента, например, ремня или цепи, передается со шкива или звездочки 4 на шкив или звездочку 6, закрепленном на исполнительном вале VI, например, шпинделе станка (зубчатые колеса 7, 8 могут быть сменными). При включенном двигателе М и отключении муфт М1, М2 и М3 вращение на исполнительный вал VI, например, шпиндель станка, не передается, вследствие чего шпиндель имеет нулевую частоту вращения и находится в "свободном" состоянии.
При отключении двигателя и включении муфт М1 и М2 получаем нулевую частоту вращения, при этом шпиндель находится в заторможенном состоянии.
Отличительной особенностью кинематической схемы, представленной на фиг. 3, является то, что в разработанных на ее основе конструкциях устройств (коробках передач) для ступенчатого изменения частот и направлений вращения исполнительного вала VII, например, шпинделя станка (дополнительно к представленной на фиг. 2), имеется возможность исключения холостого вращения шестерен 7, 8, что повышает КПД устройств (коробок передач). Такими коробками передач целесообразно оснащать станки для изготовления деталей в серийном и мелкосерийном производствах.
В корпусе или на плите с фланцами установлены:
- входной вал I, на котором смонтированы:
шкив 2, выходной вал IV (на подшипниках) со шкивом 4 (которые могут быть выполнены совместно), муфта М1 (осуществляющая сцепление вала I с валом IV);
- входной вал II, на котором смонтированы:
шкив 3, выходной вал V (на подшипниках) со шкивом 5 (которые могут быть выполнены совместно), муфта М2 (осуществляющая сцепление вала II с валом V);
- вал 3, на котором смонтированы:
зубчатое колесо 8, муфта М3 (осуществляющая сцепление вала III с валом IV);
- вал VI, на котором смонтированы:
зубчатое колесо 7, муфта М4 (осуществляющая сцепление вала VI с валом V).
Шкивы 1, 2, 3 и зубчатые колеса 7, 8 могут быть съемными.
Работа осуществляется следующим образом.
Вращение двигателя М, на валу которого расположен шкив 1, посредством бесконечного гибкого передающего элемента, например, ремня, передается на шкивы 2 и 3, расположенные соответственно на входных валах I и II. С входными валами I и II зацеплены диски муфт М1 и М2, включение которых позволяет передавать вращение на валы IV и V, на которых закреплены или выполнены заодно с валами шкивы 4 и 5. Шкивы 4 и 5, посредством бесконечного передающего элемента, например, ремня, соединены со шкивом 6, закрепленном на исполнительном вале VII, например, шпинделе станка, вследствие чего при включении муфты М1 вращение на шкив 6 передается со шкива 4, а при включении муфты М2 со шкива 5.
Таким образом, на исполнительном вале VII, например, шпинделе станка, получаем две заданные шкивами 1, 2, 3, 4, 5 и 6 частоты вращения.
Шкивы 1, 2, 3 могут быть сменными.
Так как зубчатое колесо 7, закрепленное на валу VI, взаимодействует с зубчатым колесом 8, закрепленным на валу III, то вал III, при включении муфты М4, имеет обратное направление частоты вращения. При включении муфты М3 происходит зацепление вала III с валом IV, на котором закреплен или выполнен с ним заодно шкив 4, в результате чего обратная частота вращения, посредством бесконечного гибкого элемента, например, ремня, передается со шкива 4 на шкив 6, закрепленном на исполнительном вале VII, например, шпинделе станка (зубчатые колеса 7 и 8 могут быть съемными). При включенном двигателе М и отключении муфт М1, М4, М2 вращение на исполнительный вал VII, например, шпиндель станка, не передается, вследствие чего шпиндель имеет нулевую частоту вращения и находится в "свободном" состоянии.
При отключении двигателя М и включении муфт М1 и М2 получаем нулевую частоту вращения, при этом шпиндель находится в заторможенном состоянии.
На фиг. 4 изображена кинематическая схема устройства ступенчатого изменения частоты вращения исполнительного вала V, например, шпинделе станка.
В корпусе или плите с фланцами установлены:
- входной вал I, на котором смонтированы:
шкив 2, выходной вал III (на подшипниках) со шкивом 3 (которые могут быть выполнены совместно), муфта М1 (осуществляющая сцепление вала I с валом III);
- входной вал II, на котором смонтированы:
шкив 3, выходной вал IV (на подшипниках) со шкивом 4 (которые могут быть выполнены совместно), муфта М2 (осуществляющая сцепление вала II с валом IV).
Работа осуществляется следующим образом.
Вращение двигателя М, на валу которого расположен шкив 1, посредством бесконечного гибкого передающего элемента, например, ремня, передается на шкивы 2 и 3, расположенные соответственно на валах I и II. С входными валами I и II зацеплены диски муфт М1 и М2, включение которых позволяет передавать вращение на валы III и IV, на которых закреплены (или выполнены заодно с валами) шкивы 4 и 5. Шкивы 4 и 5, посредством бесконечного гибкого элемента, например, ремня, соединены со шкивом 6, закрепленном на исполнительном вале V, например, шпинделе станка, вследствие чего при включении муфты М1, вращение на шкив 6 передается со шкива 4, а при включении муфты М2 со шкива 5.
Таким образом, на исполнительном вале V, например, шпинделе станка, получаем две заданные шкивами 1, 2, 3, 4, 5 и 6 частоты вращения. Шкивы 1, 2, 3 могут быть сменными.
На фиг. 5 изображена кинематическая схема устройства изменения направления вращения вала, например, шпинделя станка.
В корпусе установлены валы I и II, на которых смонтированы полые валы III и IV. На III и IV валах смонтированы (или выполнены заодно) шкивы 3 и 4, соединяющиеся посредством бесконечного гибкого элемента, например, ремня, со шкивом 5, расположенном на исполнительном вале V.
На конце вала II (или I) закреплен шкив 2, который, посредством бесконечного гибкого передающего элемента, например, ремня, соединяется со шкивом 1, расположенном на вале приводного двигателя М.
Работа осуществляется следующим образом.
Вращение двигателя М, на валу которого расположен шкив 1, посредством бесконечного гибкого передающего элемента, например, ремня, передается на шкив 2, расположенном на валу II (или I), в результате чего получают вращение вал II и через шестерни 6 и 7 вал I, в результате чего, при включении муфты М1 шкив 3 передает на шкив 5 одно направление вращения, а при включении муфты М2 (и отключении муфты М1) - обратное.
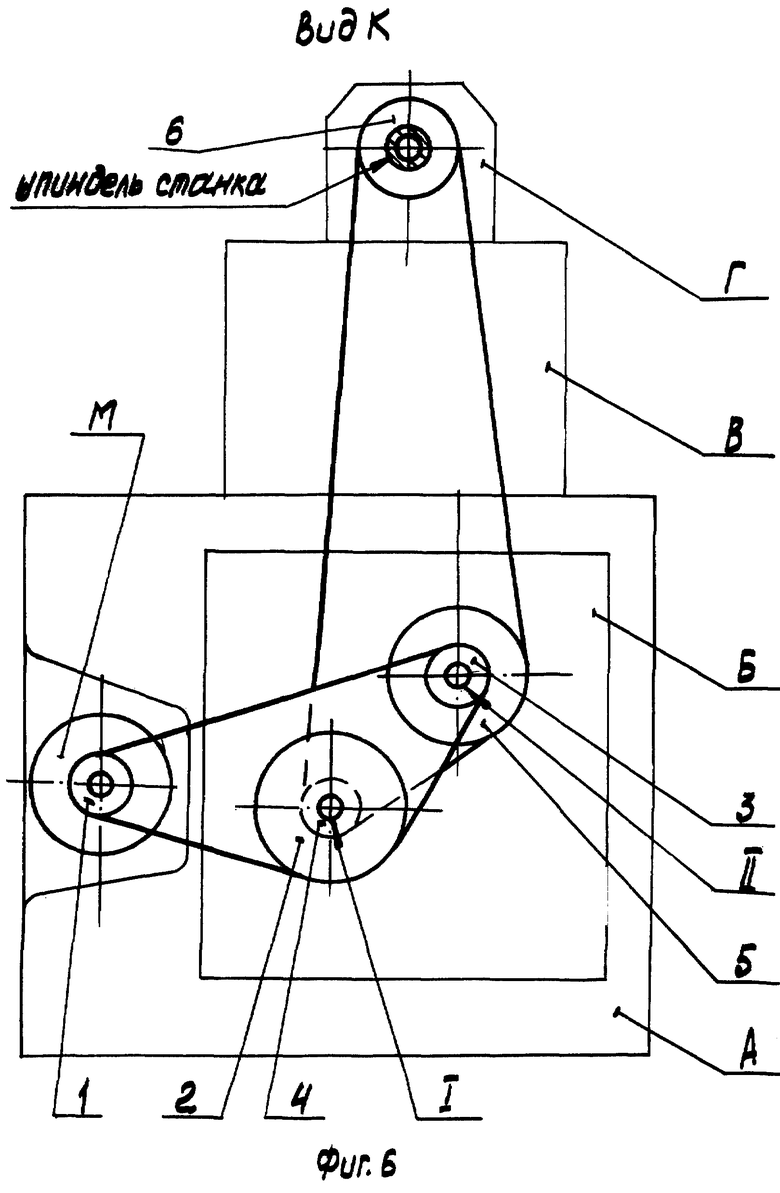
На фиг. 6 изображен вид по стрелке К (слева) устройств ступенчатого изменения частоты и направления вращения шпинделя токарного автомата - фиг. 1, 2, 3 и устройства ступенчатого изменения частоты вращения шпинделя токарного автомата - фиг. 4
К основанию станка - А крепятся:
М - двигатель, который может иметь устройство для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 1, 2, 3;
Б - корпус устройств ступенчатого изменения частоты и направление вращения шпинделя токарного автомата, который может иметь возможность для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 4, 5, 6;
В - станина, к которой крепится шпиндельная бабка Г, в которой расположен шпиндель токарного автомата.
Работа осуществляется следующим образом:
вращение двигателя М, на валу которого расположен шкив или звездочка 1, посредством бесконечного гибкого передающего элемента, например, ремня или цепи, передается на шкивы или звездочки 2 и 3, расположенные соответственно на входных валах I и II. С входными валами I и II зацеплены диски муфт М1 и М2 (фиг. 1 - 4), включение которых позволяет передавать вращение на шкивы 4 и 5. Шкивы 4 и 5, посредством бесконечного гибкого передающего элемента, например, ремня или цепи, соединены со шкивом 6, расположенном на исполнительном или промежуточном вале, например, шпинделе станка, вследствие чего при включении муфты М1 вращение на шкив 6 передается со шкива 4, а при включении муфты М2 со шкива 5.
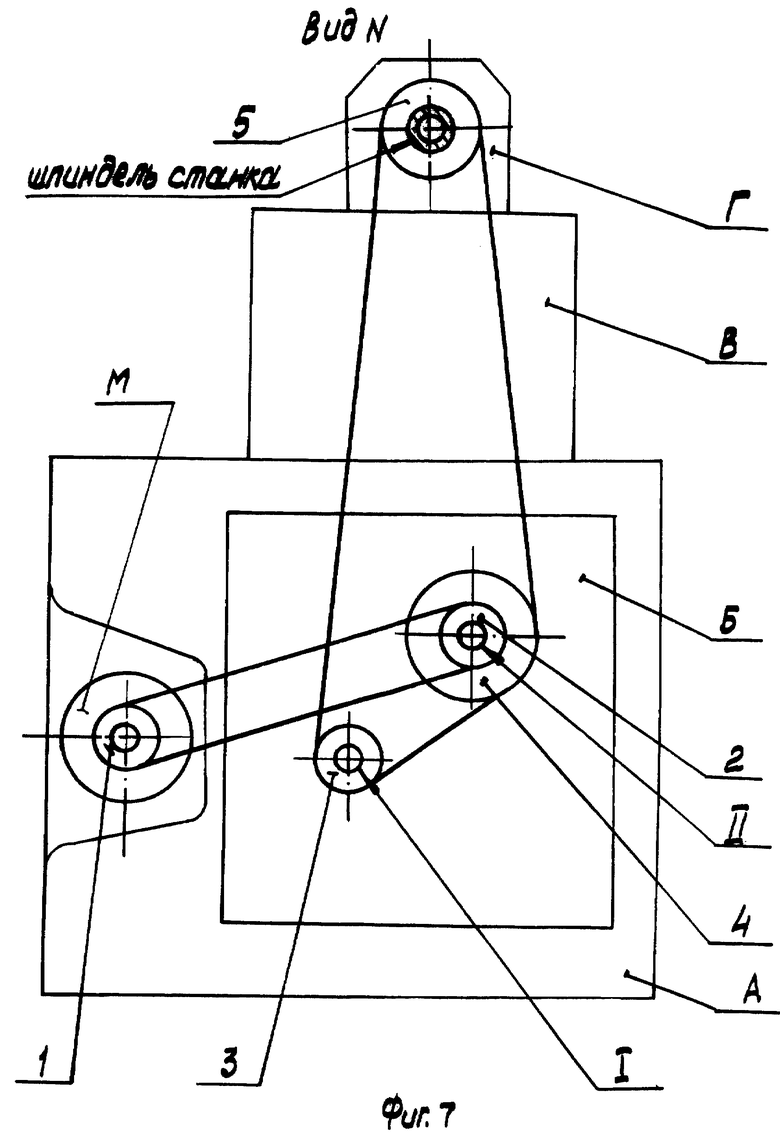
На фиг. 7 изображен вид по стрелке N (слева) устройства ступенчатого изменения направления вращения шпинделя токарного автомата на фиг. 5.
К основанию станка - А крепятся:
М - двигатель, который может иметь устройство для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 1 и 2;
Б - корпус устройства ступенчатого изменения направления вращения шпинделя токарного автомата, который может иметь возможность для его перемещения, что позволяет осуществлять натяжение ремня или цепи, взаимодействующего со шкивами или звездочками 3, 4, 5;
В - станина, к которой крепится шпиндельная бабка Г, в которой расположен шпиндель токарного автомата.
Работа осуществляется следующим способом.
Вращение двигателя М, на валу которого расположен шкив или звездочка 1, посредством бесконечного гибкого элемента, например, ремня или цепи, передается на шкив или звездочку 2, расположенную на входном валу II. С входным валом II сцеплены ведущие диски муфты М2 и, на нем же, закреплено зубчатое колесо 6, взаимодействующее с зубчатым колесом 7, расположенным на валу I (фиг. 5), в результате чего вал I, с которым сцеплены ведущие диски муфты М1, имеет обратное вращение.
Таким образом, включением муфты М2 происходит сцепление вала II со шкивом или звездочкой 4, который, посредством бесконечного гибкого элемента, например, ремня или цепи, передает вращение на шкив или звездочку, расположенный на шпинделе станка прямое вращение, а при включении муфты М1 происходит сцепление вала I с валом III, на котором закреплен шкив или звездочка 3, который, посредством бесконечного гибкого элемента, например, ремня или цепи, взаимодействуя с расположенным на шпинделе станка шкивом или звездочкой 5, осуществляет обратное вращение шпинделя станка.
Технико-экономической эффективностью предложенного устройства ступенчатого изменения частоты и направления вращения шпинделя токарного автомата, а также их вариантов, т.е. только для изменения частоты вращения (фиг. 4) или только для изменения направления вращения (фиг. 5) является:
- уменьшение количества кинематических цепей для получения того же количества заданных частот и направлений вращения (в т.ч. и их вариантов);
- снижение мощности холостого хода;
- уменьшение времени и количества выделяемого тепла при переходных процессах;
- повышение надежности и ремонтопригодности;
- снижение уровня шума;
- уменьшение стоимости.
Опытные образцы устройства ступенчатого изменения частоты вращения прошли лабораторные и производственные испытания.
Результаты положительны.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СТУПЕНЧАТОГО ИЗМЕНЕНИЯ ЧАСТОТЫ И НАПРАВЛЕНИЯ ВРАЩЕНИЯ ШПИНДЕЛЯ ТОКАРНОГО АВТОМАТА | 2003 |
|
RU2244610C2 |
| МНОГОРЕЗЦОВЫЙ ТОКАРНЫЙ АВТОМАТ | 1992 |
|
RU2087302C1 |
| Установка для фасонной обточки пуговиц | 1987 |
|
SU1613354A1 |
| МНОГОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1973 |
|
SU363588A1 |
| Многошпиндельный токарный станок | 1990 |
|
SU1785828A1 |
| АВТОМАТ ДЛЯ ИЗМЕРЕНИЯ И СОРТИРОВКИ ДЕТАЛЕЙ | 1938 |
|
SU57760A1 |
| Привод шпинделя для вибрационного резания | 1986 |
|
SU1366313A1 |
| УНИВЕРСАЛЬНЫЙ МНОГОШПИНДЕЛЬНЫЙ ПАТРОННЫЙ АВТОМАТ ДЛЯ ОБРАБОТКИ МЕЛКИХ ДЕТАЛЕЙ | 1971 |
|
SU304061A1 |
| СТАНОК ДЛЯ ПРОИЗВОДСТВА ТРУБ ИЗ КАРТОНА ИЛИ АНАЛОГИЧНОГО МАТЕРИАЛА СО СРЕДСТВОМ РЕЗАНИЯ ТРУБЫ НА ОТРЕЗКИ ЗАДАННОЙ ДЛИНЫ | 1994 |
|
RU2116892C1 |
| МЯЛЬНО-ТРЕПАЛЬНАЯ МАШИНА ДЛЯ ЛУБОВЫХ РАСТЕНИЙ | 1924 |
|
SU3964A1 |
Изобретение относится к станкостроению, устройствам, имеющим бесконечный гибкий передаточный элемент - ремень или цепь для передачи вращения на исполнительный или промежуточный вал изделия, например шпиндель станка. Устройство содержит также муфты, шестерни и дополнительный выходной вал, выполненный с возможностью взаимодействия с бесконечным гибким элементом. Для ступенчатого изменения частоты вращения бесконечный гибкий элемент расположен с возможностью передачи вращения на шпиндель от основного или дополнительного выходных валов. Для изменения направления вращения бесконечный гибкий элемент расположен с возможностью передачи вращения на шпиндель от основного или дополнительного выходных валов, соединенных между собой с помощью шестерен. 3 з.п. ф-лы, 7 ил.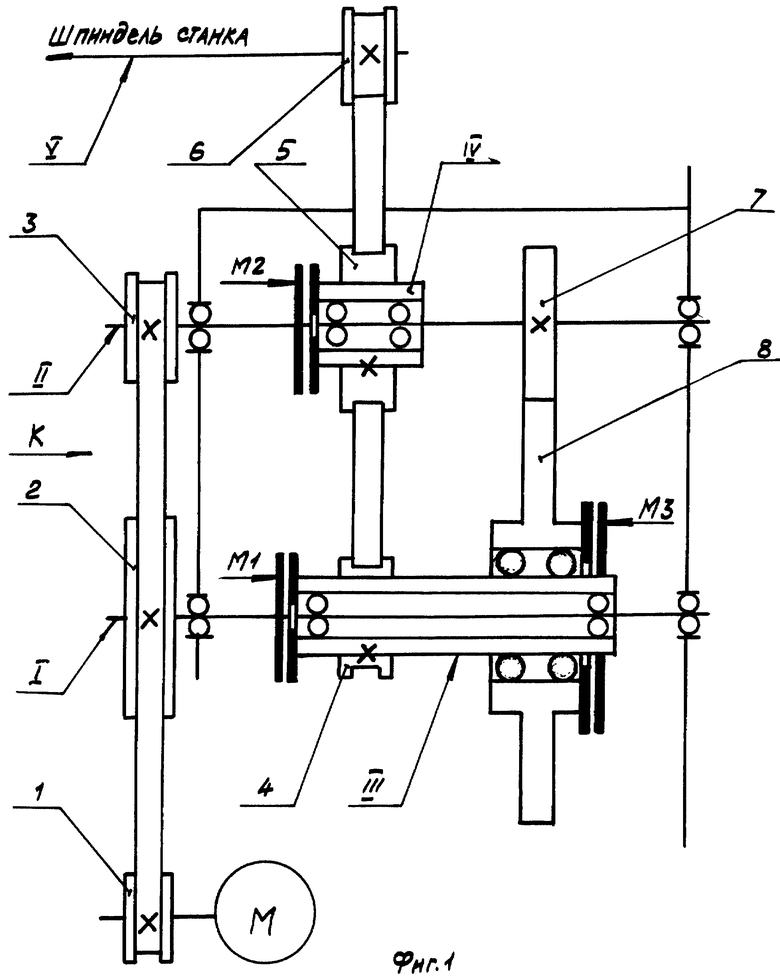
| БРОН Л.С | |||
| и др | |||
| Конструкции, наладка и эксплуатация агрегатных станков и автоматических линий, изд.4-е, - М.: Высшая школа, 1985, с.112, 113, рис.129 | |||
| Привод к металлообрабатывающим станкам | 1927 |
|
SU9954A1 |
| Реверсивная ременная передача | 1929 |
|
SU36114A1 |
| ЗАМКНУТЫЙ ПЛАНЕТАРНЫЙ ВАРИАТОР | 0 |
|
SU180449A1 |
| ПРИВОД СТАНКА | 1989 |
|
RU2036769C1 |
| Дешифратор двоичных кодов | 1971 |
|
SU463112A1 |
| Антифрикционный материал преимущественно для контактных вставок токоприемников электроподвижного состава | 1989 |
|
SU1732388A1 |
| DE 3403348 A1, 01.08.1985. | |||
