Настоящее изобретение относится к устройству для измерения сил, возникающих из-за дисбаланса ротора. Такого рода устройство известно из патента DE 3332978 А 1.
В устройствах для измерения сил, возникающих из-за дисбаланса ротора, известна установка измерительного вала с возможностью вращения в двух подшипниковых узлах, расположенных на расстоянии друг от друга и опирающихся на корпус подшипника с помощью датчика силы. Указанная опора для измерительного вала установлена на неподвижной раме.
Из патента ЕР 0343265 A1 известна установка опоры балансировочной машины, проходящей аксиально измерительному валу, с возможностью колебания относительно неподвижной рамы и размещение измерительных датчиков на удалении друг от друга между опорой и неподвижной рамой. Из патента DE 3330880 A1 известна возможность установки опоры, на которой закреплена вращающаяся опора для измерительного вала, на неподвижной раме посредством измерительных преобразователей силы, расположенных на аксиальном удалении друг от друга.
В известном из патента ЕР 0133229 A1 устройстве, служащем для балансировки автомобильных колес, измерительный вал опирается на опору на неподвижной раме, содержащую датчик силы. Для достижения динамической балансировки предусмотрены две опорные плоскости для установки измерительного вала, в которых также размещены датчики силы.
Из патента ЕР 0058860 В1 известен балансировочный станок для вращающегося тела, в указанном станке измерительный вал установлен с возможностью вращения на упругоэластичной плоской детали, расположенной вертикально на станине. Для этого на верхней кромке плоской детали предусмотрена вращающаяся опора измерительного вала. Позиционные отклонения плоской детали регистрируются измерительными датчиками с помощью рычага, размещенного в правом углу и проходящего по направлению к плоской детали. Направления приложения усилий к измерительным датчикам проходят перпендикулярно друг другу. Один из измерительных датчиков воспринимает при этом статическую составляющую, в то время как другой измерительный датчик регистрирует усилия, образующиеся вследствие динамического дисбаланса и вызывающие поворот вертикально упругоэластичной плоской детали вокруг приблизительно осевой линии.
Кроме того, из патента DE-AS 1698164 известна измерительная система, предназначенная для измерения колебаний и содержащая опору для ротора на плоских пружинах, установленных по диагонали друг к другу. Их продолжения образуют виртуальную точку пересечения в одной из плоскостей балансировки подлежащего балансировке ротора. Обе плоские пружины, установленные по диагонали друг к другу, опираются на опорную плиту с помощью вспомогательной плиты на плоских пружинах, установленных вертикально и параллельно друг другу. Колебания плоских пружин, происходящие вследствие дисбаланса ротора, регистрируются с помощью измерительных преобразователей (датчиков) колебаний и преобразуются в соответствующие измерительные сигналы.
Из патентов DE-AS 1027427 и DE-AS 1044531 известна возможность образования в упругих стержнях или пластинчатых (плоских) пружинах, образующих колеблющиеся опоры в балансировочных станках, шарниров посредством создания мест утоньшений.
Датчики силы, которые в известных устройствах предусмотрены в опорных плоскостях в местах измерения, подают сигналы, пропорциональные центробежным силам, образующимся вследствие дисбаланса ротора и вызывающим в опорных плоскостях или в местах измерения реакцию опоры, измеряемую измерительными датчиками. В современных стандартных измерительных системах в станках для балансировки колес обычно используется консольная опора для измерительного вала и установленного на нем ротора. Пересчет для динамической балансировки на обе плоскости балансировки на роторе происходит по закону рычага статики. Усилия, измеряемые датчиками силы в обеих опорных плоскостях, зависят поэтому от соответствующего расстояния, на которое ротор отстоит от обоих датчиков силы. Поскольку эти расстояния различны по величине, при изменении чувствительности одного из двух измерительных преобразователей вследствие различных воздействий, например температуры, старения, удара, перегрузки, сотрясений при транспортировке, влажности и подобных воздействий, возникает сверхпропорциональная ошибка в балансных массах, рассчитанных для соответствующих плоскостей балансировки.
В основу настоящего изобретения поставлена задача создания устройства вышеуказанного типа, в котором изменение чувствительности измерительного преобразователя (датчика) вследствие вышеуказанной динамики сил незначительно воздействует на балансировку, проводимую в плоскостях балансировки, например, посредством установления балансных грузов.
Указанная задача решается согласно изобретению посредством отличительных признаков по п.1 формулы изобретения.
Для этого выполненная жестко вспомогательная рама, на которую опирается измерительный вал в опорной плоскости, содержащей датчик силы, опирается на неподвижную раму посредством другого датчика силы. Оба датчика силы находятся, таким образом, в двух опорных системах для регистрации данных о дисбалансе, причем каждый датчик силы сопряжен с одной из двух опорных систем. Обе опорные системы находятся между измерительным валом и неподвижной рамой, например, балансировочного станка, на котором производится измерение дисбаланса и балансировка автомобильного колеса. Датчики силы могут при этом находиться в различных, однако находящихся на участке жесткой вспомогательной рамы, опорных плоскостях или в одной общей опорной плоскости.
Посредством выполнения обеих вышеуказанных опорных систем создается по меньшей мере одна дополнительная опора измерительного вала, которая имеет свойства виртуальной точки опоры в дополнительной опорной плоскости. Можно также предусмотреть две опорные плоскости такого рода, содержащие виртуальные точки опоры такого рода. Виртуальные точки опоры могут находиться с обеих сторон измеряемого ротора. Однако также возможно предусмотреть только одну дополнительную опорную плоскость, содержащую одну виртуальную точку опоры и находящуюся предпочтительно между обеими плоскостями балансировки ротора или между плоскостью, в которой находятся датчики силы, и ротором.
В предпочтительном варианте оба датчика силы установлены в общей опорной плоскости, которая проходит перпендикулярно оси измерительного вала. Усилия, прилагаемые к датчикам силы в качестве реакции опоры, направлены параллельно друг другу, в частности коаксиально, и находятся в общей плоскости опоры. Датчики силы могут, однако, находиться на участке аксиального продолжения вспомогательной рамы в различных опорных плоскостях.
Согласно предпочтительному варианту выполнения изобретения измерительный вал опирается на вспомогательную раму в первой опорной плоскости, содержащей датчик силы, и во второй опорной плоскости, содержащей виртуальную точку опоры, а вспомогательная рама опирается на неподвижную раму в одной опорной плоскости посредством второго датчика силы и далее посредством параллельного перемещения укрепляется на шарнирах на стационарной раме. Опорная плоскость, содержащая виртуальную точку опоры, может находиться между ротором, в частности автомобильным колесом, и опорной плоскостью, содержащей оба датчика силы, или предпочтительно между обеими плоскостями балансировки ротора, в частности автомобильного колеса.
Вспомогательная рама может опираться на неподвижную раму посредством пары опорных рычагов и шарниров на соответствующих концах опорных рычагов. Измерительный вал также может опираться на вспомогательную раму посредством пары опорных рычагов и шарниров на концах рычагов. Оси соответствующих шарниров проходят перпендикулярно плоскости, в которой расположены усилия, прилагаемые к датчикам силы, и ось измерительного вала. Пара опорных рычагов, с помощью которой вспомогательная рама опирается на неподвижную раму, может одновременно осуществлять параллельное перемещение вспомогательной рамы на неподвижной раме. Для этого опорные рычаги проходят параллельно друг другу. Также возможно расположить опорные рычаги под углом друг другу, причем вершина угла находится предпочтительно на оси измерительного вала или вблизи этой оси. Шарниры опорных рычагов находятся по углам трапеции в плане расположения опорных рычагов. Благодаря такому расположению создается виртуальная точка опоры, находящаяся на внешней стороне ротора. Виртуальная точка опоры измерительного вала на вспомогательной раме, находящаяся внутри ротора, в частности между областями балансировки, может быть также образована посредством опорных рычагов, расположенных под углом друг другу. Шарниры указанных опорных рычагов находятся по углам трапеции на плане расположения опорных рычагов. В предпочтительном варианте опорные рычаги выполнены в виде жестких на изгиб плоских деталей, например деталей из листового металла, отливки, катаных плоских деталей или подобных деталей, которые вместе с шарнирами обеспечивают желаемое, например, в основном линейное и коаксиальное приложение усилий к измерительным датчикам. Опорные рычаги, выполненные из плоских деталей, могут быть изготовлены из одной детали, при этом плоские детали выполнены жесткими на изгиб, а гибкими являются только находящиеся между ними, в основном линейные шарниры. Шарниры могут быть выполнены с помощью утоньшения, например сужений между отдельными жесткими на изгиб плоскими деталями. При этом образуются гибкие оси шарниров между жесткими на изгиб плоскими деталями. Благодаря соответствующему расположению, параллельно или под углом, образуются, как указывалось выше, желаемые виртуальные точки опоры, которые образуют в соответствующих опорных плоскостях опорные оси, проходящие линейно.
Виртуальные точки опоры представляют собой также точки измерения, предусмотренные в вычислительной машине рамы станка для балансировки, которые представляют собой виртуальные точки измерения.
В дальнейшем изобретение поясняется описанием предпочтительных вариантов его выполнения со ссылкой на сопровождающие чертежи, на которых:
Фиг.1 изображает первый вариант выполнения изобретения;
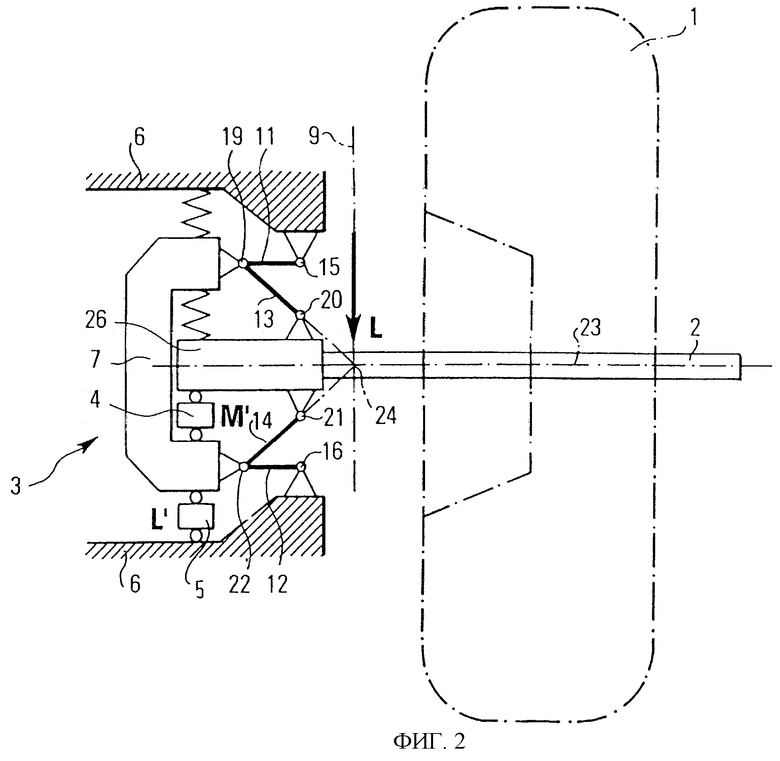
Фиг.2 - второй вариант выполнения изобретения;
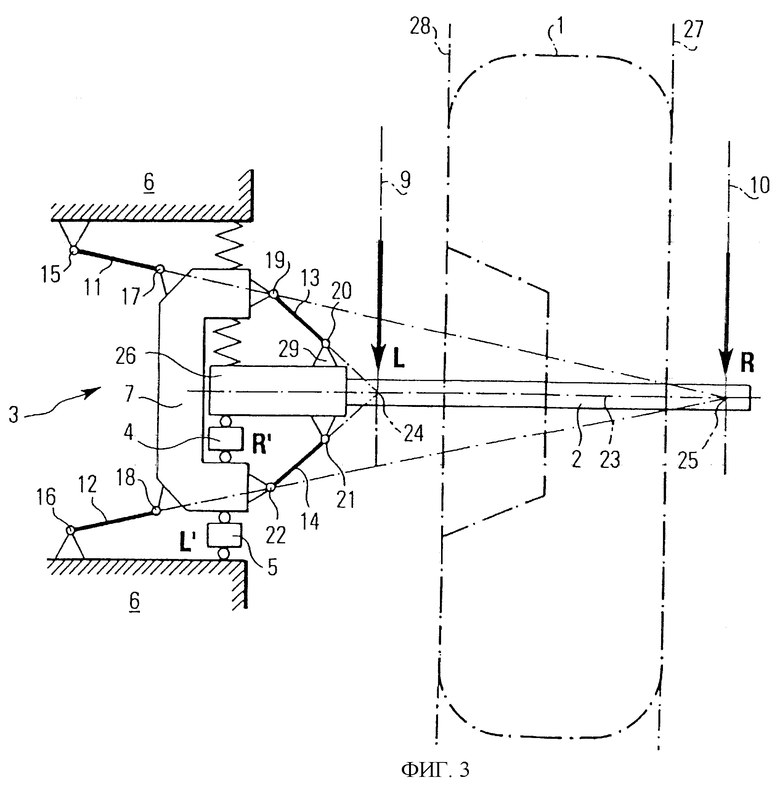
Фиг.3 - третий вариант выполнения изобретения;
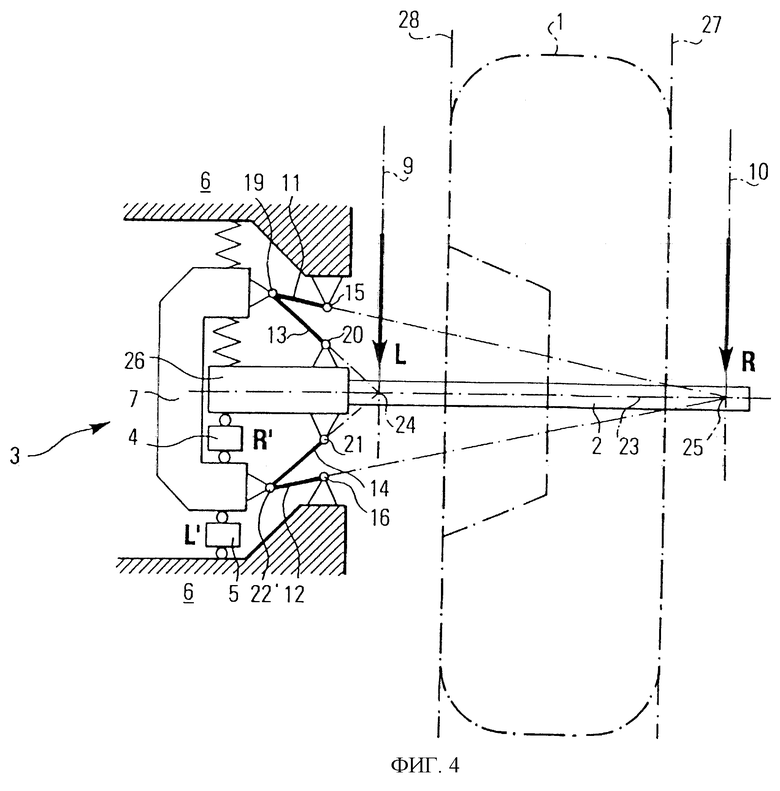
Фиг.4 - четвертый вариант выполнения изобретения;
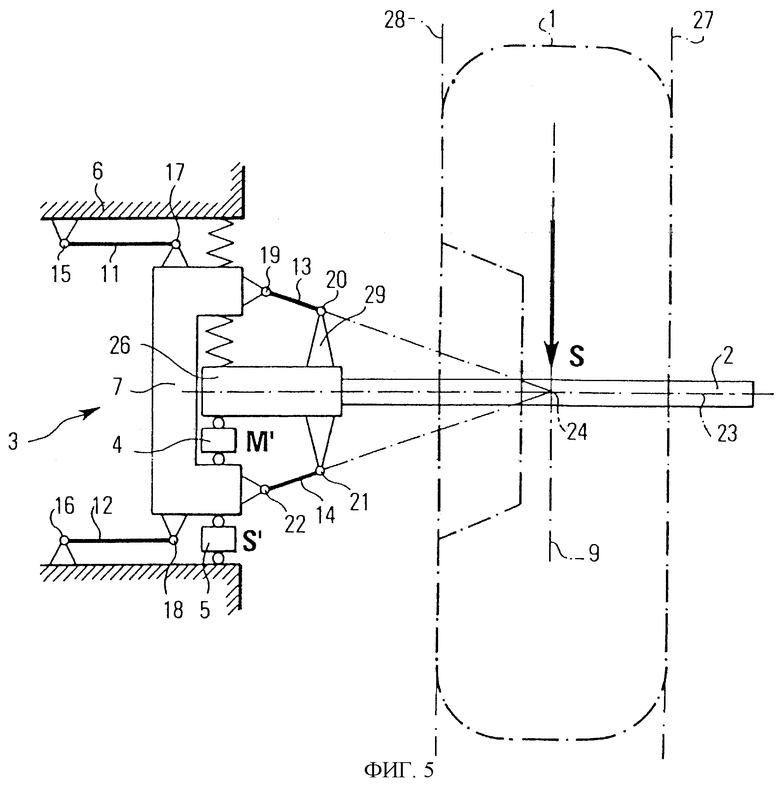
Фиг.5 - пятый вариант выполнения изобретения;
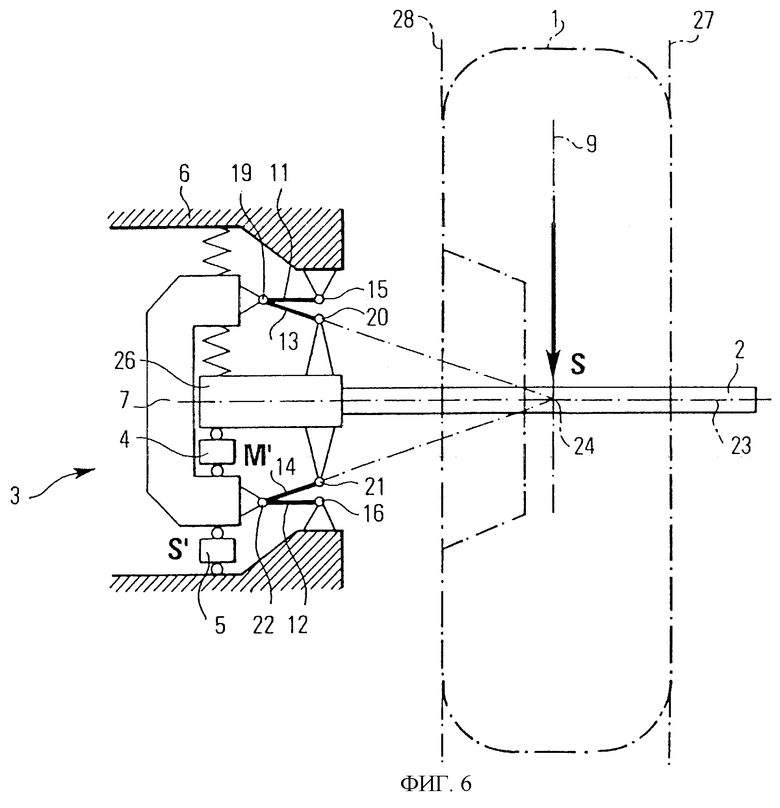
Фиг.6 - шестой вариант выполнения изобретения;
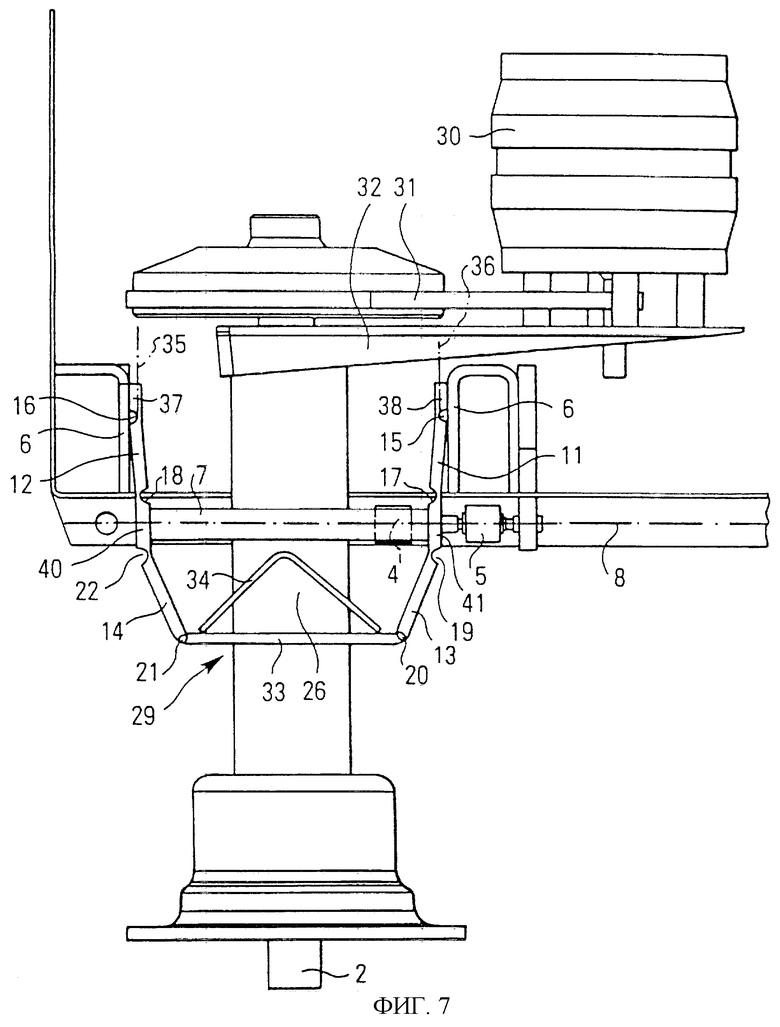
Фиг.7 - измерительное устройство и опору для измерительного вала (вид сверху), используемые в вариантах выполнения изобретения на Фиг.1, 3 и 5;
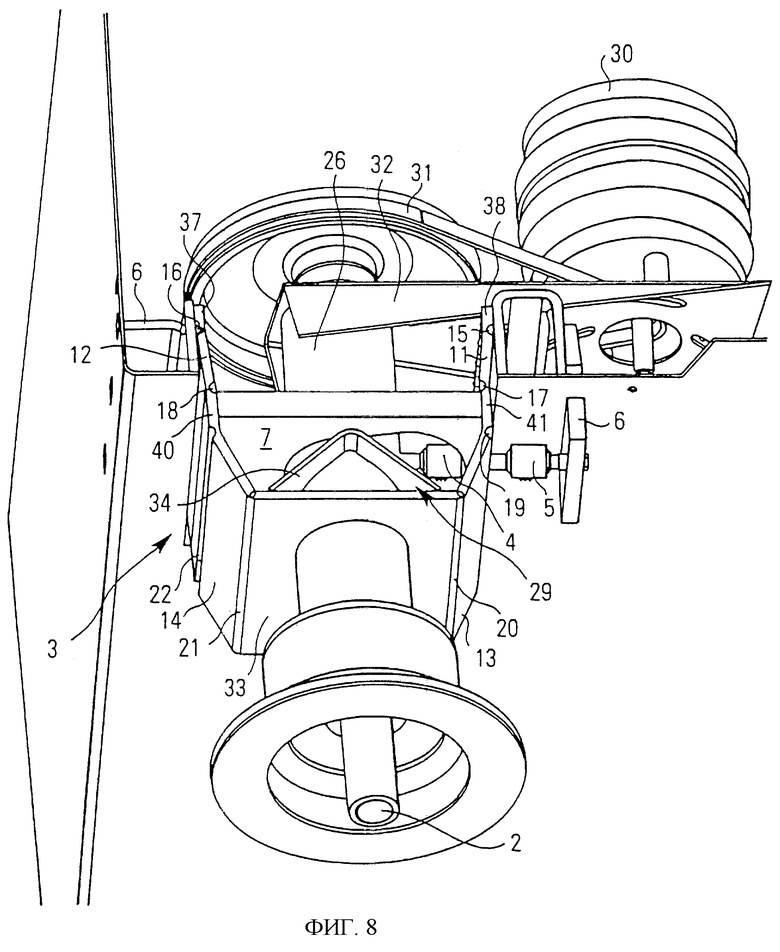
Фиг.8 - измерительное устройство на Фиг.7, согласно изобретению (общий вид спереди сверху);
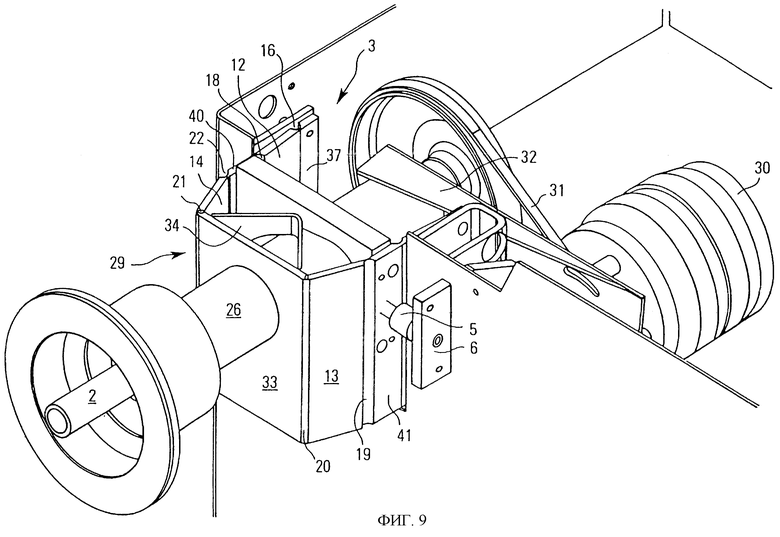
Фиг.9 - измерительное устройство на Фиг.7 и 8, согласно изобретению (общий вид сбоку сверху);
Фиг.10 - седьмой вариант выполнения изобретения.
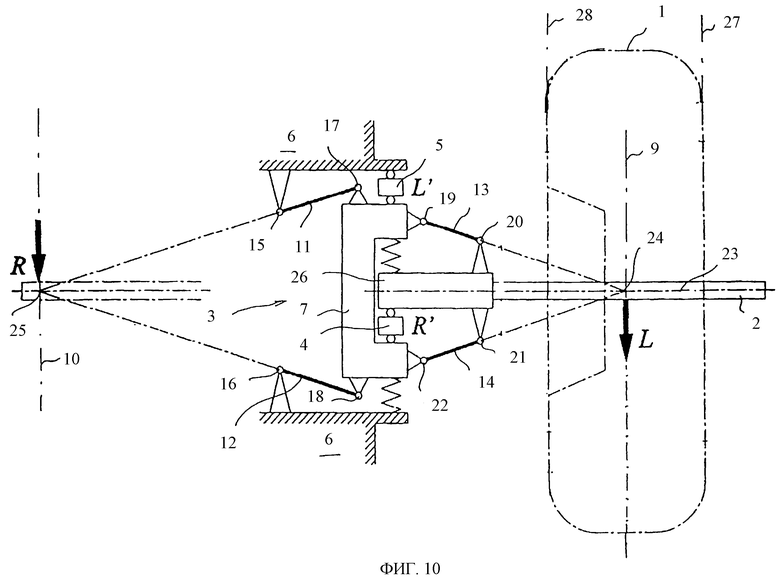
На чертежах схематично изображен ротор 1, который для измерения дисбаланса укреплен на измерительном валу 2 известным способом с помощью зажимных приспособлений (подробнее не показаны). Измерительный вал 2 установлен с возможностью вращения на неподвижной раме 6. В данном случае речь может идти о раме станка для балансировки колес. Установка производится с помощью опоры 3 (подробно описана ниже), содержащей также датчики 4, 5 силы. Опора 3 может содержать трубообразную вращающуюся опору 26, в которой установлен с возможностью вращения измерительный вал 2. Вращающаяся опора 26, служащая опорой для измерительного вала 2, установлена неподвижно в первой плоскости 8 опоры на вспомогательной раме 7 посредством датчика 4 силы. Кроме того, опорными рычагами 13, 14, образующими пару опорных рычагов и расположенными под углом друг к другу, создается виртуальная точка 24 опоры в другой плоскости 9 опоры. Точка 24 опоры действует как ось поворота, которая проходит перпендикулярно оси 23 измерительного вала 2 и перпендикулярно направлению приложения реакции опоры (силы противодействия), создаваемой при измерении дисбаланса, к датчику силы 4. Опорные рычаги 13 и 14 на концах соединены шарнирами 19 и 22 со вспомогательной рамой 7 и шарнирами 20, 21 с вращающейся опорой 26 для измерительного вала 2. Оси шарниров 19-22 проходят параллельно оси поворота, которая образуется в виртуальной точке 24 опоры. Виртуальная точка 24 опоры может находиться между ротором 1 и плоскостью 8 опоры, в которой лежат датчики 4 и 5 силы (Фиг.1 и 2). Виртуальная точка 24 опоры может также находиться в области ротора, в частности между плоскостями 27 и 28 балансировки, в которых производится балансировка, например, посредством установки балансных грузов (Фиг.5 и 6).
Вспомогательная рама 7 опирается посредством датчика 5 силы на неподвижную раму 6. Датчик 5 силы может быть расположен в плоскости 8 опоры, проходящей перпендикулярно измерительному валу 2. Можно также расположить датчик 5 силы эксцентрично в аксиальном направлении измерительного вала 2 в другой плоскости опоры. Кроме того, вспомогательная рама 7 опирается посредством пары опорных рычагов (опорные рычаги 11 и 12) на неподвижную раму 6. Опорные рычаги 11, 12 на концах соединены шарнирами 15, 16 с неподвижной рамой 6 и шарнирами 17, 18 на Фиг.1, 3, 5, 10 и 7-9, а также шарнирами 19, 22 на Фиг.2, 4 и 6 со вспомогательной рамой 7. Вспомогательная рама 7 выполнена в виде жесткого опорного блока или неподвижной и жесткой на изгиб опорной рамы.
В вариантах выполнения изобретения, показанных на Фиг.1 и 2, а также 5-9, опорные рычаги 11 и 12 расположены в основном параллельно друг другу и параллельно оси 23 измерительного вала 2. Опорные рычаги 11 и 12 образуют таким образом рычажную направляющую для параллельного движения для приложения к датчику 5 силы в направлении в основном перпендикулярно оси 23 измерительного вала 2 реакции опоры (сил противодействия), возникающей в процессе измерения дисбаланса.
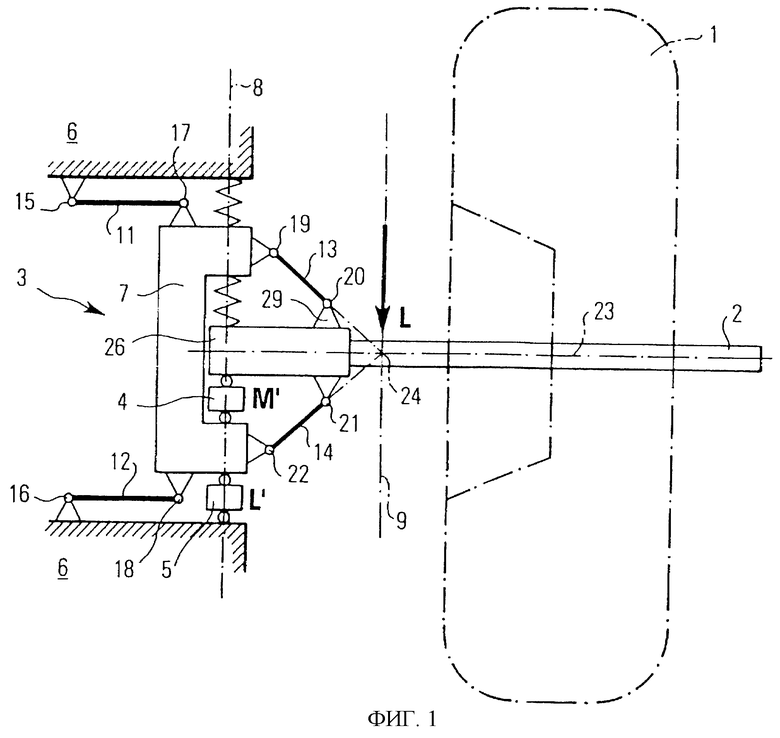
В вариантах выполнения изобретения, показанных на Фиг.3, 4 и 10, оба опорных рычага 11 и 12 расположены по отношению друг к другу под острым углом, вершина которого находится на оси 23 измерительного вала 2 или вблизи оси 23. Указанная вершина образует следующую виртуальную точку 25 опоры в плоскости 10 опоры, проходящей перпендикулярно измерительному валу 2 и лежащей с наружной стороны ротора 1.
В варианте выполнения изобретения, показанном на Фиг.10, виртуальная точка 25 опоры и плоскость 10 опоры лежат на продолжении (показано пунктиром) измерительного вала 2, которое проходит относительно опоры 3 измерительного вала 2 со стороны, противоположной продольному удлинению измерительного вала 2. Точка 25 опоры и относящаяся к ней плоскость 10 опоры находятся относительно опоры 3 со стороны, противолежащей ротору 1.
Виртуальная точка 25 опоры также имеет свойство оси поворота, которая проходит перпендикулярно оси 23 измерительного вала 2 и перпендикулярно направлению приложения силы к датчикам 4 и 5 силы. В изображенных вариантах выполнения изобретения указанное приложение силы осуществляется в плоскости 8 опоры. Для достижения свойства оси поворота в соответствующих виртуальных точках 24, 25 опоры проходят оси шарниров 15-22 параллельно друг другу и перпендикулярно оси 23 измерительного вала 2, а также направлению приложения реакции опоры к датчикам 4 и 5 силы в плоскости 8 опоры.
В вариантах выполнения изобретения, показанных на Фиг.3 и 4, с обеих сторон ротора 2, а именно с внутренней стороны и наружной стороны ротора, создаются плоскости 9 и 10 опоры с виртуальными точками 24 и 25 опоры. Виртуальные точки 24 и 25 опоры имеют свойства виртуальных точек измерения. Силы L, прилагаемые к внутренней точке 24 опоры, прилагаются к датчику 5 силы, а силы R, прилагаемые к точке 25 опоры, прилагаются к датчику 4 силы. Датчики силы подают соответствующие сигналы L’ и R’. Создание в виртуальных точках 24 и 25 опоры таких виртуальных точек измерения достигается благодаря тому, что тогда, когда центробежная сила, образующаяся вследствие дисбаланса ротора, прилагается в левой плоскости 9 опоры, датчик 5 силы подает измерительный сигнал L’, пропорциональный величине указанной центробежной силы, в то время как датчик 4 силы не подает никакого сигнала. Если в правой наружной плоскости 10 опоры прилагается центробежная сила R, образующаяся вследствие дисбаланса ротора, только датчик 4 силы подает пропорциональный измерительный сигнал R’, в то время как датчик 5 силы не подает никакого сигнала. Из этого следует консольная установка опоры, при которой плоскости 27 и 28 балансировки на роторе 1 находятся между виртуальными точками измерения или виртуальными измерительными плоскостями, которые соответствуют плоскостям 9 и 10 опоры, как это изображено на Фиг.3 и 4. При воздействии силы между плоскостями 9 и 10 опоры, образующейся вследствие дисбаланса ротора, опорные реакции (усилия на опоре), действующие в этих плоскостях (виртуальных измерительных плоскостях), распределяются в соответствии с расстояниями опор от точки контакта, а датчики 4 и 5 силы передают соответствующие измерительные сигналы.
В варианте выполнения изобретения, показанном на фиг.10, одна виртуальная точка 24 опоры, в которой действует центробежная сила L, образующаяся вследствие дисбаланса ротора, находится в плоскости 9 опоры между обеими плоскостями 27, 28 балансировки, предпочтительно почти посередине между обеими плоскостями 27, 28 балансировки. Другая виртуальная точка 25 опоры находится относительно опоры 3 измерительного вала 2 с другой стороны продолжения измерительного вала. В данной точке прилагается центробежная сила R, образующаяся вследствие дисбаланса ротора. Как уже пояснялось выше, датчики 4 и 5 силы подают измерительные сигналы R’ и L’, пропорциональные центробежным силам R и L.
В вариантах выполнения изобретения, показанных на Фиг.1 и 2, а также 5-9, внешняя виртуальная точка опоры находится на бесконечном или относительно большом расстоянии в несколько метров, например от приблизительно трех до двадцати метров и более, поскольку посредством опорных рычагов 11 и 12 достигается в основном прямолинейная направляющая вспомогательной рамы 7. Если в этих вариантах выполнения изобретения в плоскости 9 опоры (виртуальной плоскости измерения) в виртуальной точке опоры (виртуальной точке измерения) прилагается центробежная сила (L на фиг.1 и 2 и S на Фиг.5 и 6), образующаяся вследствие дисбаланса ротора, то это усилие регистрируется только датчиком 5 силы, который подает пропорциональный сигнал L’ или S’. Датчик 4 силы сигнала не подает. Независимо от удаления отдаленности прилагаемой центробежной силы датчик 5 силы вследствие прямолинейной направляющей вспомогательной рамы 7 будет подавать сигнал, пропорциональный только величине центробежной силы. Датчик 4 силы, напротив, будет подавать измерительный сигнал М’, который пропорционален не только величине центробежной силы и, таким образом, величине дисбаланса, но также и расстоянию от точки приложения силы до плоскости 9 опоры или виртуальной точки 24 опоры.
В вариантах выполнения, показанных на Фиг.1, 3, 5 и 10, а также на Фиг.7-9, вспомогательная рама 7 опирается на неподвижную раму 6 с помощью пары опорных рычагов, образованной опорными рычагами 11 и 12, а трубообразная вращающаяся опора 26 измерительного вала 2 опирается с помощью пары опорных рычагов, образованной опорными рычагами 13 и 14, в аксиальном направлении измерительного вала 2 друг за другом. На Фиг.3 и 4 пары опорных рычагов имеют одинаковое направление наклона. В варианте выполнения направление наклона 11, 12 противоположно направлению наклона пары опорных рычагов 13, 14. В вариантах выполнения, показанных на Фиг.2, 4 и 6, опорная рама 7 опирается на неподвижную раму 6, а вращающаяся опора 26 измерительного вала 2 - на вспомогательную раму 7 с помощью соответствующих пар опорных рычагов 11, 12 и 13, 14 рядом друг с другом или друг над другом. При этом шарниры 17, 19 и 18, 22 могут совпадать в общих шарнирах 19 и 22 на вспомогательной раме 7, как это показано на Фиг.2, 4 и 6.
Опорные рычаги 11-14 могут быть образованы плоскими деталями, выполненными жесткими на изгиб. Плоские детали могут быть выполнены из одной детали, при этом шарниры образуются посредством линейных участков утоньшения (ослаблений), например, в форме сужений. Как следует из Фиг.7-9, из детали, образующей плоские детали для опорных рычагов 11-14, может быть также выполнена поддерживающая плита 33, которая является элементом поддерживающего приспособления 29. Поддерживающая плита 33 прочно связана с трубообразной вращающейся опорой 26, например посредством сварки. Дополнительно в качестве элемента поддерживающего приспособления 29 может быть предусмотрен еще опорный угольник 34, который также прочно связан с поддерживающей плитой 33 и вращающейся опорой 26, например, посредством сварки. На чертежах изображен верхний опорный угольник 34. Дополнительно может быть предусмотрен нижний опорный угольник. Верхний и нижний опорные угольники могут состоять также из угольника, в который вращающаяся опора 26 вводится через отверстие в угольнике и прочно связывается с ним, например, посредством сварки. Благодаря этому создается неподвижное и жесткое на изгиб соединение поддерживающего приспособления 29 с вращающейся опорой 26 между обоими шарнирами 20 и 21. Шарниры 20 и 21 находятся между обоими опорными рычагами 13 и 14 и поддерживающей плитой 33.
Из одной детали, из которой выполнены плоские детали для опорных рычагов 11-14, могут быть, кроме того, выполнены крепежные плиты 37, 38 и 40, 41. Крепежные плиты 37, 38 прочно связаны с неподвижной рамой 6, например, посредством резьбового соединения или другим способом. Крепежные плиты 37 и 38 образуют места крепления для плеча опорного рычага (плечо силы), которое образовано опорными рычагами 11 и 12 и с помощью которого вспомогательная рама 7 опирается на неподвижную раму 6. Между крепежными плитами 37 и 38 и плоскими деталями, образующими опорные рычаги 11 и 12, предусмотрены шарниры 15 и 16, выполненные линейными участками утоньшений или сужениями. Участки утоньшений имеют вогнутое, в частности, полукруглое поперечное сечение.
Кроме того, из одной детали выполнены обе крепежные плиты 40 и 41, которые прочно связаны с боковыми поверхностями вспомогательной рамы 7, например, посредством винтового соединения, сварки или подобным способом. Между обеими крепежными плитами 40 и 41, и опорными рычагами 11 и 12 посредством участков утоньшений или сужений выполнены шарниры 17 и 18. Между плоскими деталями, образующими опорные рычаги 13 и 14, выполнены посредством участков утоньшений или сужений шарниры 19 и 22.
Таким образом, можно из одной детали выполнить практически всю опору 3, с которой измерительный вал 2 опирается на неподвижную раму 6 и которая задает виртуальные точки опоры и точки измерения.
Параллельное перемещение вспомогательной рамы 7 на неподвижной раме достигается в основном благодаря тому, что базовые линии вогнутых сужений 15, 17 и 16, 18 находятся с обеих сторон опорных рычагов 11 и 12 приблизительно в параллельных плоскостях 35 и 36, в которых реализуется направляющая функция обоих опорных рычагов 11 и 12. Соответствующие сужения 15, 17 и 16, 18 находятся на противоположных поверхностях опорных рычагов 11 и 12, образующих плоские детали. Опорные рычаги 11 и 12 наклонены друг к другу под чрезвычайно острым углом, однако при этом, как уже указывалось выше, рычажная направляющая для параллельного движения достигается посредством направляющей функции в параллельных плоскостях 35 и 36. При этом могут быть реализованы схемы измерительных устройств, соответствующие Фиг.1 и 5. Для реализации схемы измерительного устройства, соответствующей Фиг.3, опорные рычаги 11 и 12 могут быть наклонены друг к другу под углом соответствующей величины.
Для реализации варианта выполнения изобретения, изображенного на Фиг.10, следует направить опорные рычаги 11, 12 на Фиг.7-9 задними концами друг на друга. Задние сужения или шарниры 15, 16 находятся ближе к оси измерительного вала, чем передние сужения или шарниры 17, 18.
Как следует из Фиг.8, оба датчика 4, 5 расположены на одной линии действия силы, при этом датчик 4 силы расположен между вращающейся опорой 26 (ошибочно указана позиция 6) и внутренней стороной вспомогательной рамы 7, а датчик 5 силы - между наружной стороной вспомогательной рамы 7 или крепежной плитой 41 (Фиг.9) и неподвижной рамой 6.
Для приведения в действие измерительного вала 2 предусмотрен электропривод 30, который приводит в действие измерительный вал посредством ременной передачи 31. Двигатель 30 установлен на вращающейся опоре 26 на консоли 32. Благодаря такой установке на результат измерения не влияют помехи, обусловленные электроприводом.
В аксиальном направлении создается опора 3 для измерительного вала 2 на неподвижной раме 6. Благодаря этому достигается в связи с уменьшенной динамикой силы, в частности при консольной установке измерительного вала 2, уменьшение влияния изменений чувствительности датчика силы вследствие различных воздействий температуры, старения, удара, перегрузки, сотрясений при транспортировке и влажности, сокращение потребности в замене датчика силы, исключение дополнительной юстировки после перевозки и монтажа станка, сокращение расходов на обслуживание, получение более точных результатов измерений, уменьшение разрешающей способности аналого-цифровых преобразователей при преобразовании в цифровую форму аналоговых измерительных сигналов и большое виртуальное удаление измерительных плоскостей, несмотря на компактную конструкцию. Несмотря на консольную установку измерительного вала достигается сокращенная динамика силы аналогично измерительному устройству, содержащему две опорных точки с двух сторон ротора.
Перечень позиций, упомянутых в описании
1 ротор
2 измерительный вал
3 опора
4 датчик силы
5 датчик силы
6 неподвижная рама
7 вспомогательная рама
8 плоскость опоры
9 плоскость опоры
10 плоскость опоры
11 опорный рычаг
12 опорный рычаг
13 опорный рычаг
14 опорный рычаг
15 шарнир
16 шарнир
17 шарнир
18 шарнир
19 шарнир
20 шарнир
21 шарнир
22 шарнир
23 ось измерительного вала
24 виртуальная точка опоры
25 виртуальная точка опоры
26 вращающаяся опора
27 плоскость балансировки
28 плоскость балансировки
29 поддерживающее приспособление
30 электропривод
31 ременная передача
32 консоль
33 поддерживающая плита
34 опорный угольник
35 параллельная плоскость
36 параллельная плоскость
37 крепежная плита
38 крепежная плита
40 крепежная плита
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПТИЧЕСКОГО СКАНИРОВАНИЯ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267110C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627968C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| УСТАНОВКА ДЛЯ ОБСЛУЖИВАНИЯ АВТОМОБИЛЬНЫХ КОЛЕС | 2013 |
|
RU2615839C2 |
| ИНСТРУМЕНТ ДЛЯ БАЛАНСИРОВКИ МОДУЛЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2711248C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
Изобретение относится к устройству для измерения сил, возникающих из-за дисбаланса ротора (1), в частности автомобильного колеса. Устройство содержит измерительный вал (2), который установлен с возможностью вращения вокруг своей оси (23) и на котором установлен ротор (1) для проведения измерения, а также опору (3) измерительного вала (2) на неподвижной раме (6), содержащую датчики (4, 5) силы, причем опора (3) содержит вспомогательную раму (7), на которую опирается измерительный вал (2) посредством первого датчика (4) силы и, по меньшей мере, одной виртуальной точки (24) опоры, а вспомогательная рама (7) опирается на неподвижную раму (6) посредством другого датчика (5) силы. Технический результат - уменьшение силовой динамики по отношению к современным станкам с консольной опорой. 24 з.п. ф-лы, 10 ил.
| RU 2001380 C1, 15.10.1993 | |||
| DE 3332978 A1, 15.03.1984 | |||
| ЛИНЕЙНЫЙ ИНТЕРПОЛЯТОР | 0 |
|
SU343265A1 |
| DE 3330880 A1, 08.03.1984 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 5189912 A 02.03.1993 | |||
| DE 4329831 A1, 09.03.1995. | |||

