.
Изобретение относится к весоизмерительной технике, в частности к грузоприемным узлам конвейерных весов.
Цель изобретения - повышение точности за счет уменьшения трения скольжения шариков.
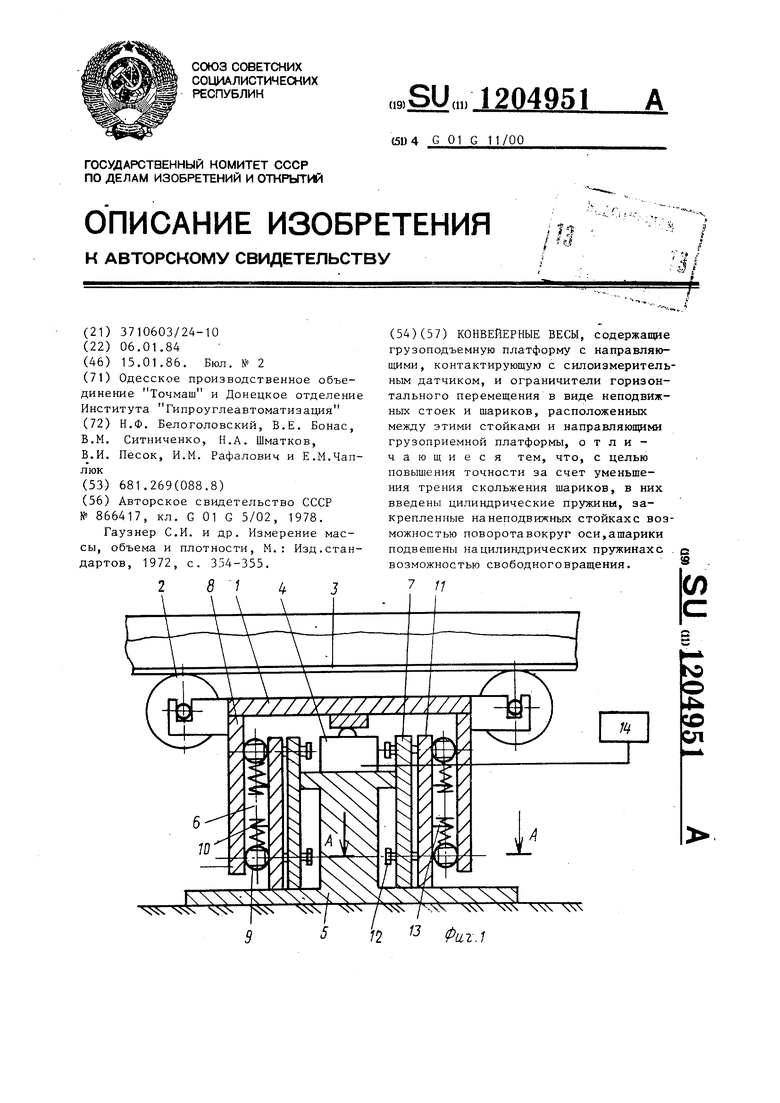
На фиг. 1 показана схема устройства; на фиг. 2 - разрез А-А на фиг.1.
Конвейерные весы состоят из грузо приемной платформы 1 с роликами 2, на которые опирается транспортирующая лента 3 с материалом, силоизме- рительного датчика А, установленного на опорной платформе 5, ограничителя 6 горизонтального перемеще. ия, состоящего из неподвижных стоек 7, между которыми и направляюш 1ми 8, жестко прикрепленными к платформе 1, установлены шарики 9, размещенные в цилиндрических пружинах 10. На неподвижных стойках 7 установлены регулируемые опоры 11, которые упираются в болты 12, ввинченные в стой ки 7. Пластины 13 служат для закрепления на них пружин 10 с шариками 9. Для измерения веса имеется аппаратура 14, подключенная к датчику 4.
Конвейерные весы работают следующим образом.
При движении ленты 3 с материалом усилие через грузоприемную платформу 1 передается на силоизмерительный датчик 4, сигнал с которого поступает на измерительную и регистри- рукмцую аппаратуру 14.
204951
Под воздействием динамических усилий грузоприемная платформа 1 стремится к смещению в горизонтальной плоскости. Этому препятствуют
5 ограничители 6, оставляя грузоподъемной платформе 1 возможность только плоскопараллельного перемещения по направлению действия силы тяжести массы перемещаемого материала. 10 Это достигается тем, при при смещении грузоподъемной платформы 1 под действием горизонтальных состав - ляю1Щ1х направляющие 8 контактируют с шариками 9, свободно размещенными
15 в пружинах 10, которые в свою очередь контактируют с регулируемыми опорами 11, упирающимися в регули- руемые болты 12, ввинченные в неподвижные стойки 8, препятствуя
20 тем самым смещению грузоприемной платформы 1 в горизонтальной плоскости.
Свободное размещение шариков 9 в пружинах 10 обеспечивает их прокатывание между направляющими 8 и регулируемыми опорами 11 в процессе перемещения грузоприемной платформы 1. В зтом случае отсутствует трение скольжения, что уменьшает погрешность взвешивания.
Положение шариков 9 по высоте регулируется вращением пружин 10 по пластинам 13, что дает возможность установить их по одной высоте при настройке весов.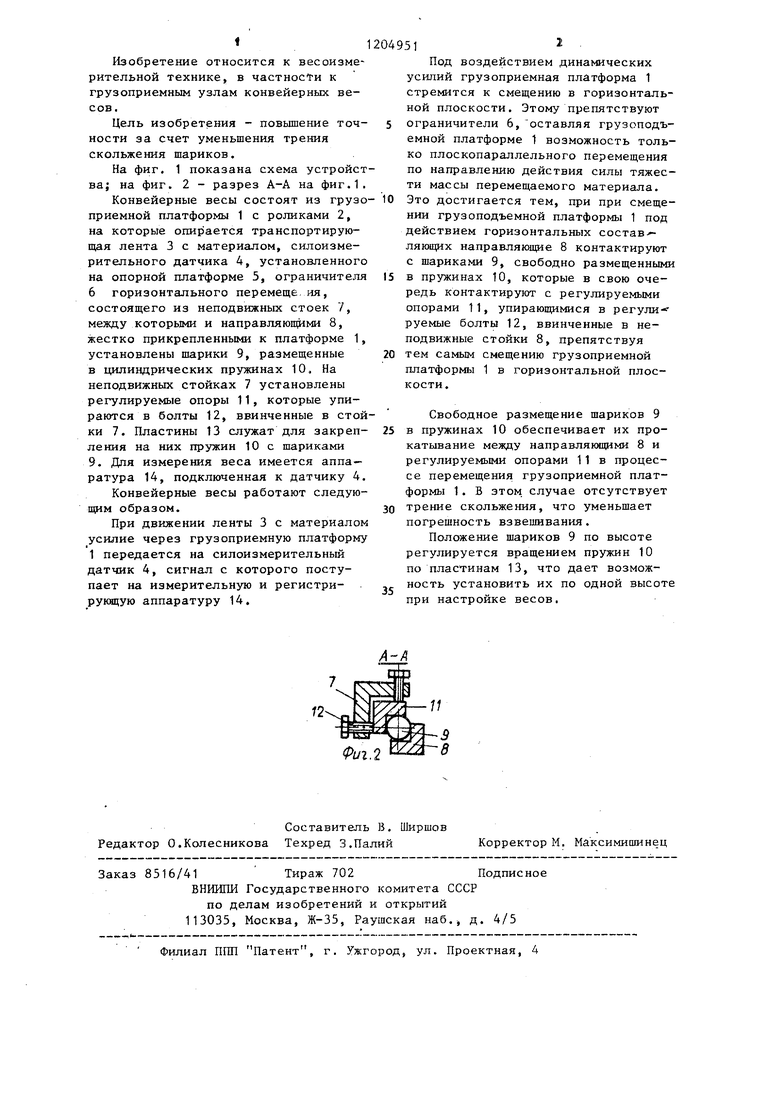
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ, ЗАЩИЩЕННЫЕ ОТ УДАРНЫХ ВОЗДЕЙСТВИЙ ТРАНСПОРТИРУЕМОГО ГРУЗА | 2003 |
|
RU2247335C1 |
| Конвейерные весы | 1982 |
|
SU1107001A1 |
| Грузоприемное устройство платформенных весов | 1982 |
|
SU1418578A1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| Весоизмерительное устройство | 1987 |
|
SU1532819A1 |
| Весовое устройство | 1987 |
|
SU1509603A1 |
| Весовое устройство для взвешивания животных в движении | 1988 |
|
SU1616559A1 |
| Автоматические конвейерные весы | 1987 |
|
SU1548670A1 |
Фиг.2
Составитель В. Ширшов Редактор О.Колесникова Техред 3.Палий
Корре Подпи
8516/41Тираж 702
ВНИЖШ Государственного комитета СССР
по делам изобретений и открытий 113033, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПШ1 Патент, г. Ужгород, ул. Проектная, 4
Корректор М. Максимишинец Подписное
| Способ измерения массы тела и устройство для его осуществления | 1978 |
|
SU866417A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
