11
Изобретение относится к мавшао- строению, в частности к захватным устройствам промышленных роботов и манипуляторов, и может быть использовано, например, для подачи заготовок из сотовых кассет на рабочую позицию станка.
Цель изобретения - расширение технологических возможностей за счет предварительного разведения зажимных губок при зажиме детали в центрах станкао
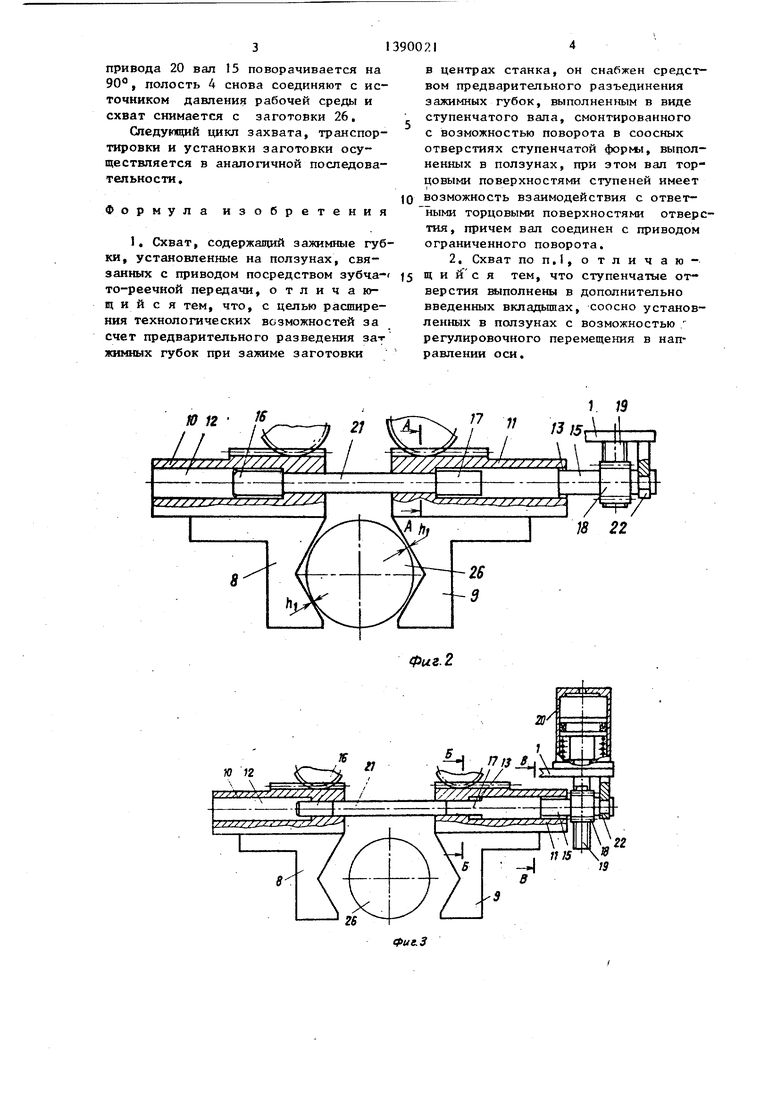
На фиг,1 изображен схват, сечение зажимных губок в рабочем положении; на фиг,2 - то же, при частично разведенном зафиксированном положении, зажимных губок; на фиг.З - то же, при открытом положении зажимных гу
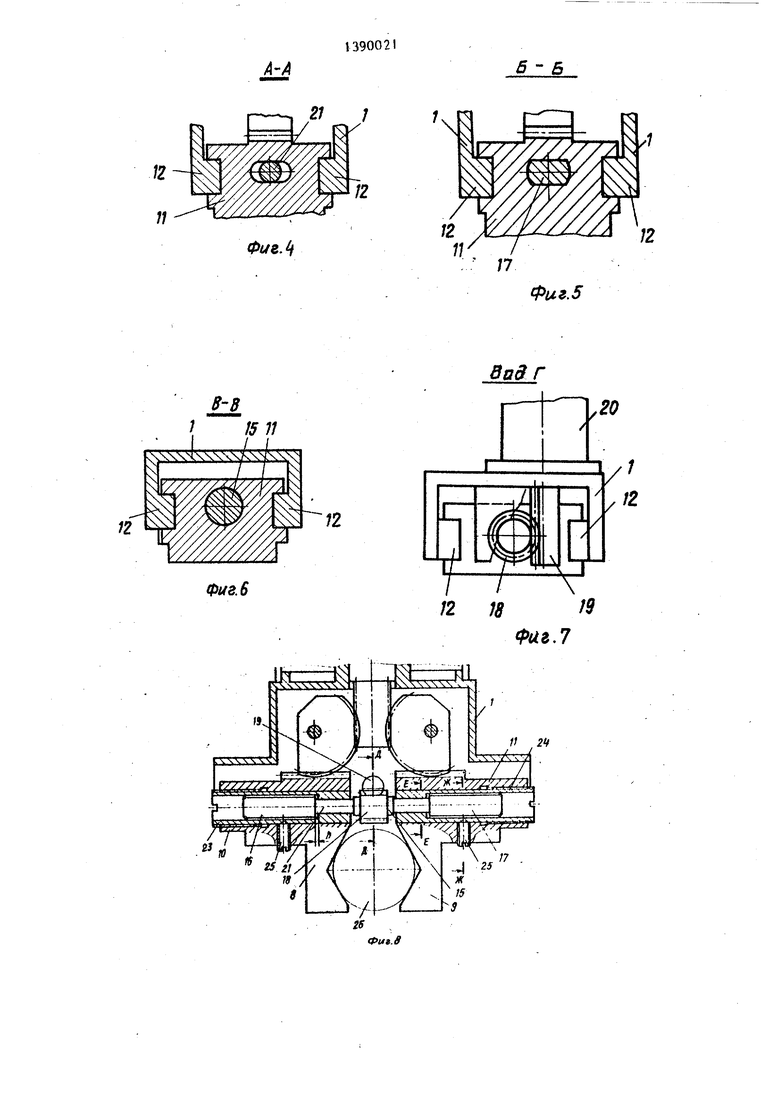
бок; на фиг,4 - сечение А-А на фиг,2; 20 поршень 5 со штоком 6 перемещает- на фиг,5 - сечение Б-В на фиг,3;ся в цилиндре 2 (вниз) и через поеДля осуществления регулировочных изменений зазора между торцовы ш поверхностями ступеней вала 15 и торцовыми поверхностями ступеней отверстий 13 и 14 последние выполняются на вкпадьшах 23 и 24, которые имеют возможность регулировочного и осевого перемещений в ползунах 10 и 11, посредством резьбы и фиксируются винтами 25,
Кроме того, привод 20 ограниченного rtoBopoTa вала 15 может быть расположен на оси симметрии схвата, при этом зубчатое колесо 18 также расположено на средней цилиндрической части 21 вала 15,
Схват работает следующим образом.
Подачей сжатого воздуха в полость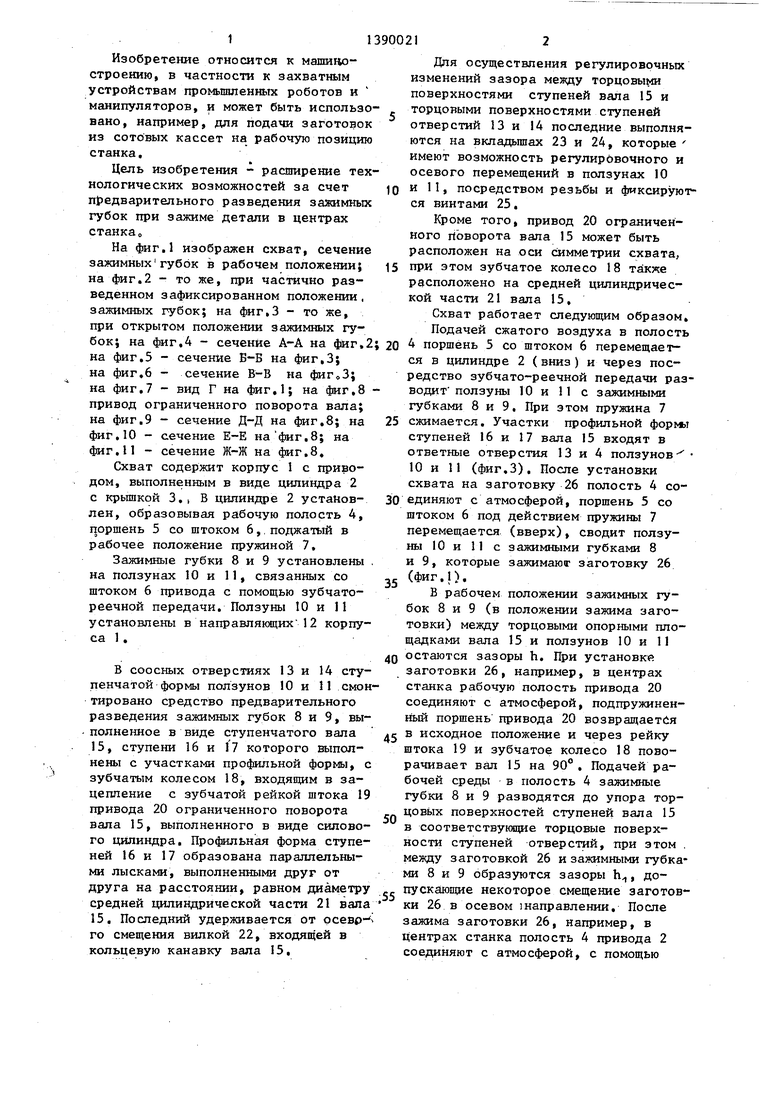
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1987 |
|
SU1440707A2 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Автомат для резки труб | 1987 |
|
SU1526932A1 |
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| Механизированное устройство станка для установки ступенчатого вала | 2023 |
|
RU2811775C1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Многооперационный станок | 1986 |
|
SU1351738A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам промьшшенньпс роботов и манипуляторов. Цель изобретения - расширение технологических возможностей за счет предварительного разведения зажимных губок при зажиме заготовки в центрах станка. На корпусе I смонтирован привод, выполненный в виде цилиндра 2 с поршнем 5, и ползуны 10, 11 с зажимными губками 8,9. Поршень поджат в рабочее положение пружиной 7 и кинематически соединен посредством зубчато-реечной передачи с ползунами 10, 11. В соосных отверстиях 12, 13 ступенчатой формы пол , зунов 10,11 смонтировано средство предварительного разведения зажимных губок, выполненное в виде ступенчатого вала 15, ступени 16 и 17 которого выполнены с участками профильной формы. Торцовые поверхности ступеней 16 и 17 имеют возможность взаимодействия с соответствующими торцовыми поверхностями отверстий 12 и 13. Вал 15 соединен с приводом 20 ограниченного поворота. Вал 15 в одном из угловых положений ограничивает раскрытие зажимных губок 8,9, что обеспечивает удержание заготовки 26 на рабочей позиции обрабатывающего станка и некоторое перемещение заготовки 26 в осевом направлении. 1 з.п. ф-лы, 11 ил. с (Л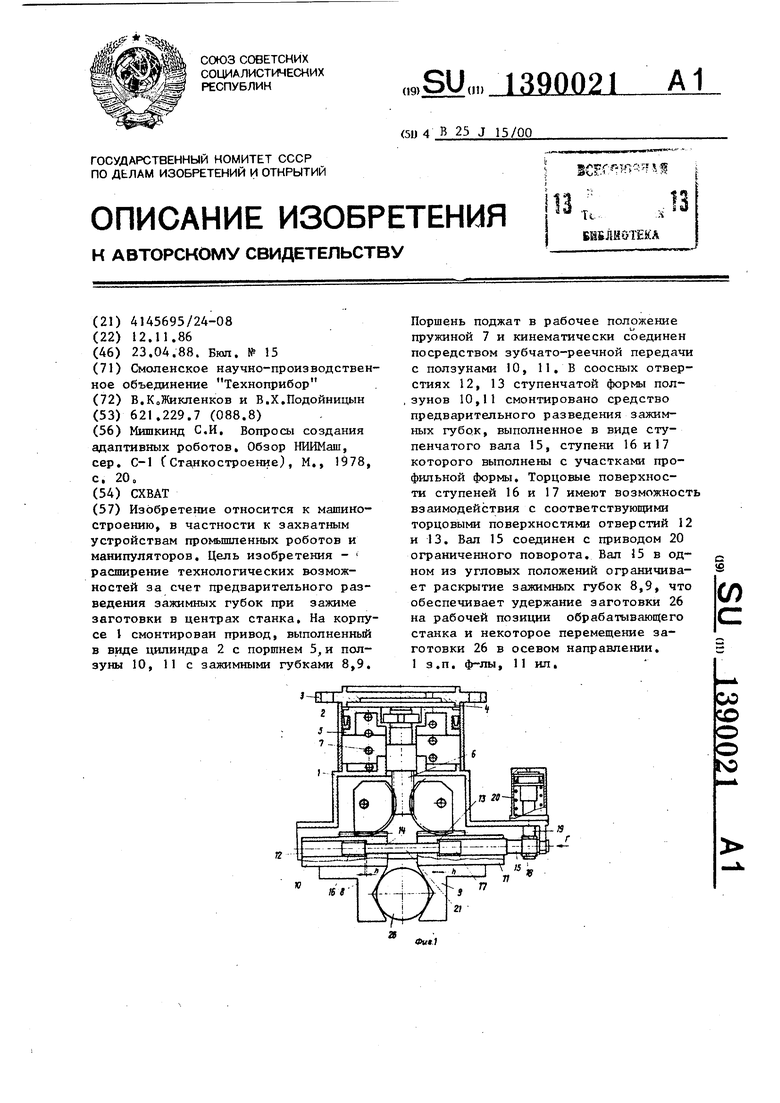
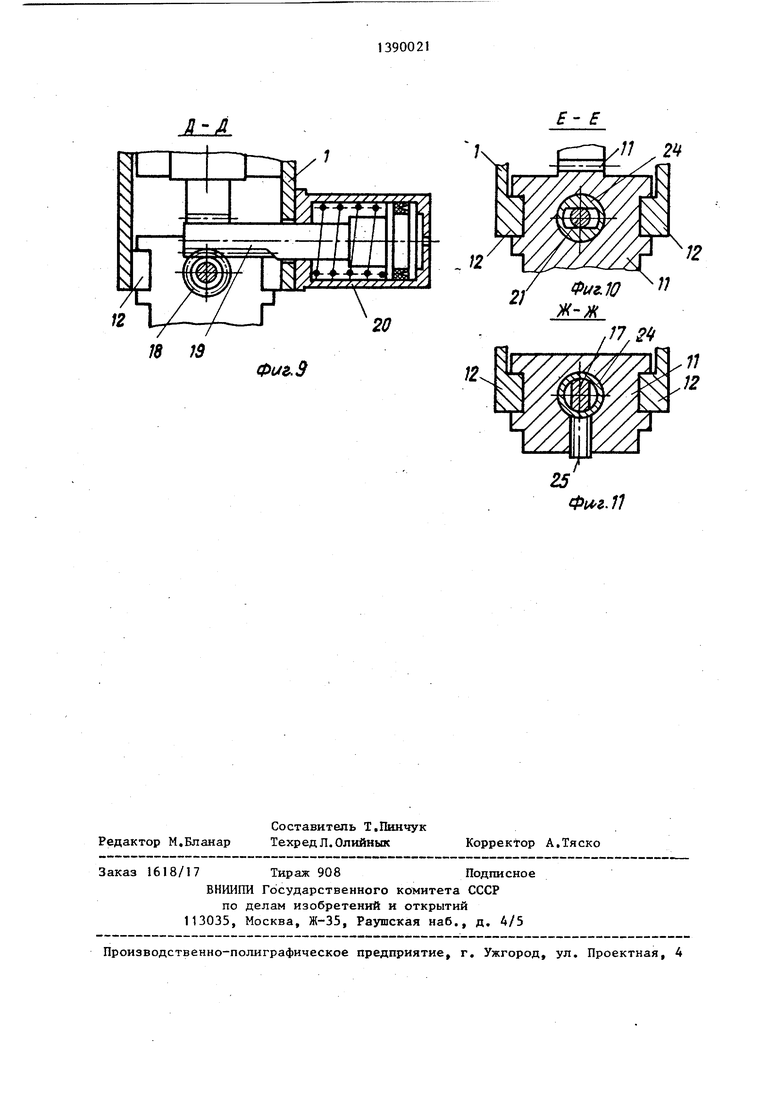
на фиг,6 - сечение В-В на на фиг,7 - вид Г иа фиг,1; на фиг,8 - привод ограниченного поворота вала; на фиг,9 - сечение Д-Д на фиг,8; на фиг,10 - сечение Е-Е на фиг,8; на фиг, 11 - сечение Ж-Ж на фиг,8,
Схват содержит корпус 1 с приводом, выполненным в виде цилиндра 2 с крьшкой 3,, В цилиндре 2 установлен, образовывая рабочую полость 4, гторшень 5 со штоком 6,, поджатый в рабочее положение пружиной 7,
Зажимные губки 8 и 9 установлены , на ползунах 10 и 11, связанных со штоком 6 привода с помощью зубчато- реечной передачи. Ползуны 10 и 11 установлены в направляющих 12 корпуса 1 ,
В соосных отверстиях 13 и 14 ступенчатой формы ползунов 10 и 11 смонтировано средство предварительного разведения зажимных губок 8 и 9, вы- - полненное в виде ступенчатого вала 15, ступени 16 и 17 которого выполнены с участками профильной формы, с зубчатым колесом 18, входящим в за- цеппение с зубчатой рейкой штока 19 привода 20 ограниченного поворота вала 15, выполненного в виде силового цилиндра. Профильная форма ступеней 16 и 17 образована параллельными лысками, выполненными друг от друга на расстоянии, равном диаметру средней цилиндрической части 21 вала 15, Последний удерживается от рсеврго смещения вилкой 22, входящей в кольцевую канавку вала 15,
редство зубчато-реечной передачи разводит ползуны 10 и 11 с зажимными губками 8 и 9, При зтом пружина 7
5 сжимается. Участки профильной формы ступеней 16 и 17 вала 15 входят в ответные отверстия 13 и 4 ползунов- 10 и 11 (фиг,3). После установки схвата на заготовку 26 полость 4 со0 единяют с атмосферой, поршень 5 со штоком 6 под действием пружины 7 перемещается (вверх), сводит ползуны 10 и 11 с зажимными губками 8 и 9, которые зажимают заготовку 26
2 (фиг,)),
В рабочем положении зажимных губок 8 и 9 (в положении зажима заготовки) между торцовыми опорными площадками вала 15 и ползунов 10 и 11 остаются зазоры h. При установке заготовки 26, например, в центрах станка рабочую полость привода 20 соединяют с атмосферой, подпружиненный поршень привода 20 возвращается в исходное положение и через рейку
0
5
0
5
штока 19 и зубчатое колесо 18 поворачивает вал 15 на 90°, Подачей рабочей среды в полость 4 зажимные губки 8 и 9 разводятся до упора тор- цовЫх поверхностей ступеней вала 15 в соответствуняцие торцовые поверхности ступеней отверстай, при этом . между заготовкой 26 и зажимными губками 8 и 9 образуются зазоры h, допускающие некоторое смещение заготовки 26 в осевом Iнаправлении. После зажима заготовки 26, например, в Центрах станка полость 4 привода 2 соединяют с атмосферой, с помощью
привода 20 вал 15 поворачивается на 90, полость 4 снова соединяют с источником давления рабочей среды и охват снимается с заготовки 26,
Следующий цикл захвата, транспортировки и установки заготовки осуществляется в аналогичной последовательности.
Формула изобретения
/ / -t-/, I /-;
У Р//ТУ/ /// ///( I
К
в центрах станка, он снабжен средством предварительного разъединения зажимных губок, выполненга)1м в виде ступенчатого вала, смонтированного с возможностью поворота в соосных отверстиях ступенчатой форм., выполненных в ползунах, при этом вал торцовыми поверхностями ступеней имеет I
ВОЗМОЖНОСТЬ взаимодействия с ответными торцовыми поверхностями отверстия , причем вал соединен с приводом ограниченного поворота,
2, Схват поп,1, отличаю-
Щ и и с я тем, что ступенчатые отверстия выполнены в дополнительно введенных вкладышах, соосно установленных в ползунах с возможностью ; регулировочного перемещения в направлении оси.
1 fS
LI
17 J 1 I
Фиг.2
2S
tlЛ //JjV
Д
f(A
.4
б- В
Фиг. 5
дав Г
Я Д
19
Фи&.3
В- Е
.2
20
2J
ФигЛО )-Ж
. 11
| Мишкинд С.И | |||
| Вопросы создания адаптивных роботов | |||
| Обзор НИИМаш, сер | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
