397 8 ЮЮ
If П 2
Изобретение относится к машиностроению и может быть использовано в различных областях народного хозяй- ств.а.
Цель изобретения - упрощение конструкции путем сокращения количест ва поступательных кинематических звеньб в и повьшение точности позиционирования . .
На чертеже показан захват манипулятора, продольный разрез.
Захват манипулятора содержит привод в виде силового цилиндра 1,шток которого связан с расположенным и направляющих 2 корпуса 3 ползуном 4, несущим прижим 5,
Ползун 4 посредством зубчатой на- врезки через блок шестерен, состоящий ,из малой б и большой 7 шестерен,емоктированных в корпусе 3 на оси бусвя- ,зан с ползуном 9, На ползуне 9, расположенном в направялющих 10 корпуса 3, закреплена центрирующая губка 11 с призматическим вырезом, имеющим угол Ы . Для обеспечения постоянства расположения осей детали 12 относительно корпуса 3 захвата,независимо от ее диаметра, диаметры делительных окружностей шестерен и угол при- зматического выреза губки связаны между собой следующей зависимостью:
D, D S in с/- / 2,
tj,e D, - диаметр делительной окружности малой щестерни; DJ, - диаметр делительной окружности большой шестерни; (Л - угол призматического выреза губки.
В случае необходимости точность позиционирования можно повысить под- бором угла наклона зубьев шестерен.
Захват работает следующим .образом.
При подаче давления в штоковую область силового цилиндра 1 ползун 4 с прижимом 5 перемещается по направляющим 2 корпуса 3 и перемещает связанный с ним кинематически посредством блока шестерен 6 и 7 ползун 9 с центрвдующей губкой 11 в направляющих 10 корпуса 3,
Таким образом происходит захват детали 12. Разжим происходит при подаче давления в бесштоковую полость силового цилиндра 1.
Формула изобретения
Захват Манипулятора, содержащий привод, пару расположенных в направляющих корпуса ползунов, несущих соответственно центрирующую губку с симметричным призматическим вырезом и прижим, отличающийся тем, что, с целью упрощения конструкции, ползуны кинематически связаны между собой блоком шестерен, меньшая из которых находится в зацеплении с ползуном,, несущим прижим, а боль- шая - с ползуном, несущим призматическую губку, при этом диаметрьг делительных окружностей шестерен и угол призматического выреза губки связаны между собой следующей зависимо™ стью:
0
где D D
2 . oi, D D sinci/2
диаметр делительной ок ружностн малой шестерни; диаметр делительной окружности большой шестерни; угол гфизматического выреза губки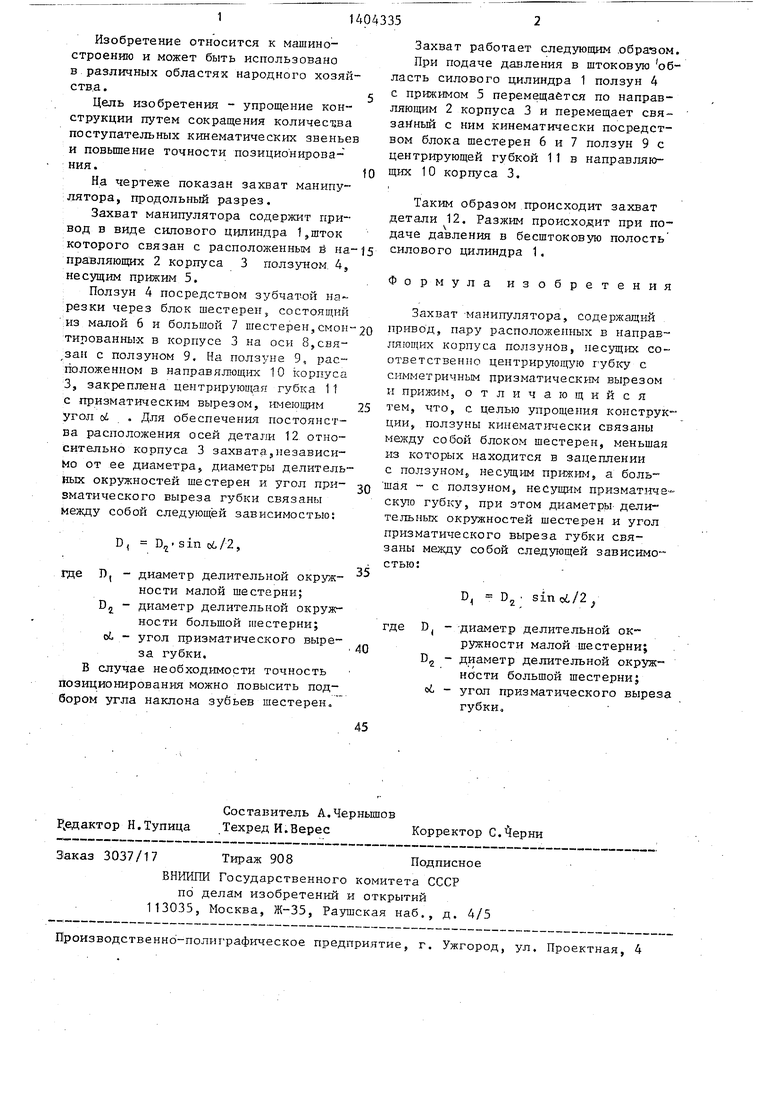
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Автомат для фрезерования пазов | 1981 |
|
SU1000177A1 |
| Захватное устройство | 1985 |
|
SU1293021A1 |
| Манипулятор | 1983 |
|
SU1186464A1 |
| Манипулятор | 1981 |
|
SU1050860A1 |
| Схват | 1982 |
|
SU1077781A1 |
| Схват | 1989 |
|
SU1701516A1 |
| Захват манипулятора | 1978 |
|
SU768636A1 |
| Цепевязальный автомат с кантователем вертикального исполнения | 1986 |
|
SU1383571A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
Изобретение относится к машиностроению и может быть использовано в различных областях народного хозяйства. Цель изобретения - упрощение конструкции устройства путем сокращения количества поступательных кинематических звеньев и повышение точности позиционирования. Устройство содержит привод в виде силового цилиндра 1, шток которого связан с расположенным в направляющих 2 корпуса 3 ползуном 4, несущим прижим 5. Ползун 4 связан с ползуном 9, расположенным в направляющих 10 корпуса 3, посредством блока зубчатых шестерен 6 и 7, смонтированных на оси 8 корпуса 3. На ползуне 9 закреплена губка 11, имеющая призматический вырез. Для обеспечения постоянства расположения осей детали 12 относительно корпуса-3 захвата, независимо от ее диаметра, диаметры делительных окружностей шестерен и угол призматического выреза губки связаны между собой зависимостью: D D,- sinoi /2, где D - диаметр делительной окружности малой шестерни; D - диаметр делительной окружности большой шестерни; Ы. - угол призматического выреза губки. 1 ил. о
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
