Рука робота в силу особенностей своей конструкции (форме, размерам и т.д.) предназначена для выполнения технологических операций, некоторых функций человека-оператора либо для использования в человекообразных роботах при ликвидациях последствий аварий и катастроф в местах, где человеку находиться опасно, в условиях радиоактивного, химического или бактериологического заражений.
Известна конструкция кистевого механизма промышленного робота (патент США №5934148 от 10.08.99 г., МПК В 25 J 17/00), которая монтируется на конце 2-звенной руки ПР, которая выполняет операции с 2-мя управляемыми координатами, например, операции изгиба и операции вращения. ПР состоит из основания, к которому крепится 2-звенная рука с кистью. Кисть выполняет движение изгиба, поворачиваясь вокруг оси, перпендикулярной продольной оси 2-го звена руки, а вращение осуществляется относительно продольной оси. К кистевому механизму крепится исполнительное устройство, состоящее из удерживающего устройства и рабочего инструмента.
Недостатками конструкции является то, что она предназначена для работы с предметами определенной формы, при их фиксации необходимо большое усилие, сложно организовать обратную связь по усилию захвата предметов, 2-звенная рука имеет небольшое число подвижностей.
Прототипом взято устройство типа “рука” для передачи предметов (Патент Россия №2154569 от 20.08.2000 г., МПК B 25 J 18/04), представляет собой комбинированный механизм, выполненный в виде подвижного основания, несущего исполнительного механизма с ведущим звеном и губками для захвата предметов, механизма поворота подвижного основания, включающего ведущее звено и привод.
Недостатками этого устройства является то, что оно перемещается по определенной траектории, при этом передает предметы с помощью захвата с 2 губками. У него небольшой диапазон возможных по форме и весу предметов.
Изобретение направлено на обеспечение работоспособности в чрезвычайных ситуациях, устойчивость к радиоактивному и электромагнитному излучениям, простоту обслуживания, простоту и удобство эксплуатации, повышение надежности за счет использования пневматического привода и особенностей конструкции.
Рука робота, содержащая шарнирный 4-звенник, включающий в себя три вращательных звена и охват. Звенья имеют вид Х-образных труб, внутри которых с одной стороны расположены пневматические цилиндрические мышцы, с другой - антагонисты, к донышкам которых крепятся гибкие металлические стержни. Схват имеет вид “варежки”, т.е. состоит из 2-х частей: одна часть представляет собой подвижный элемент, другая выполнена из 3-х металлических пластин, соединенных шарнирами, к внутренним сторонам обеих частей жестко крепятся плоские мышцы. Передача усилий между звеньями и позиционирование схвата осуществляется посредством цепной передачи.
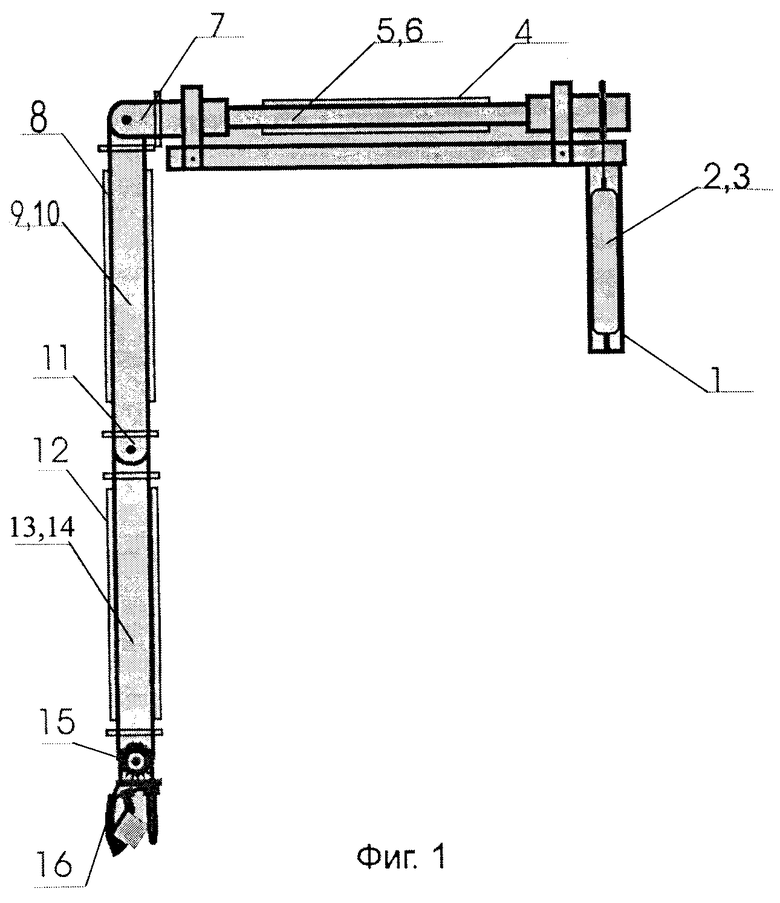
На фиг.1 представлен общий вид руки робота.
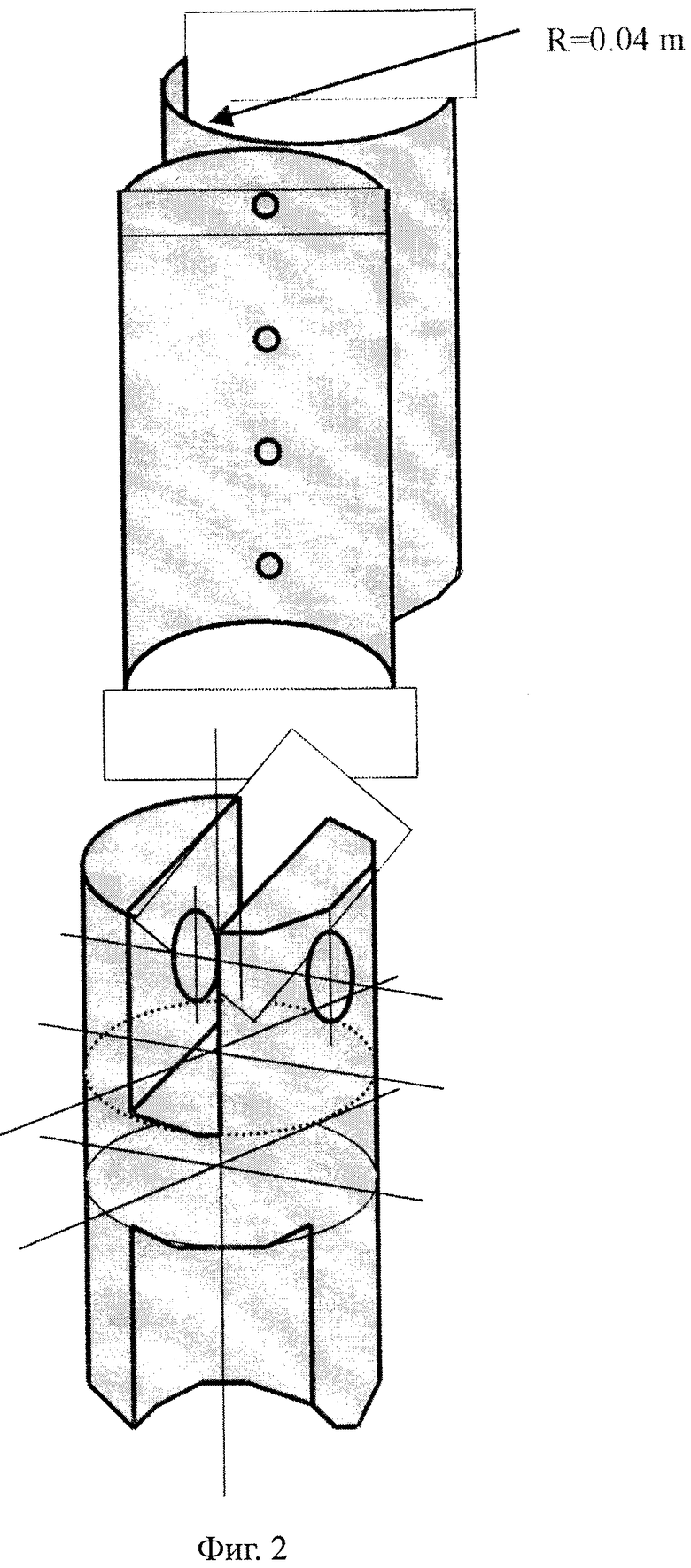
На фиг.2 представлена конструкция "костей" (в виде Х-образных труб) плеча, предплечья и сустава со стороны ведущего звена.
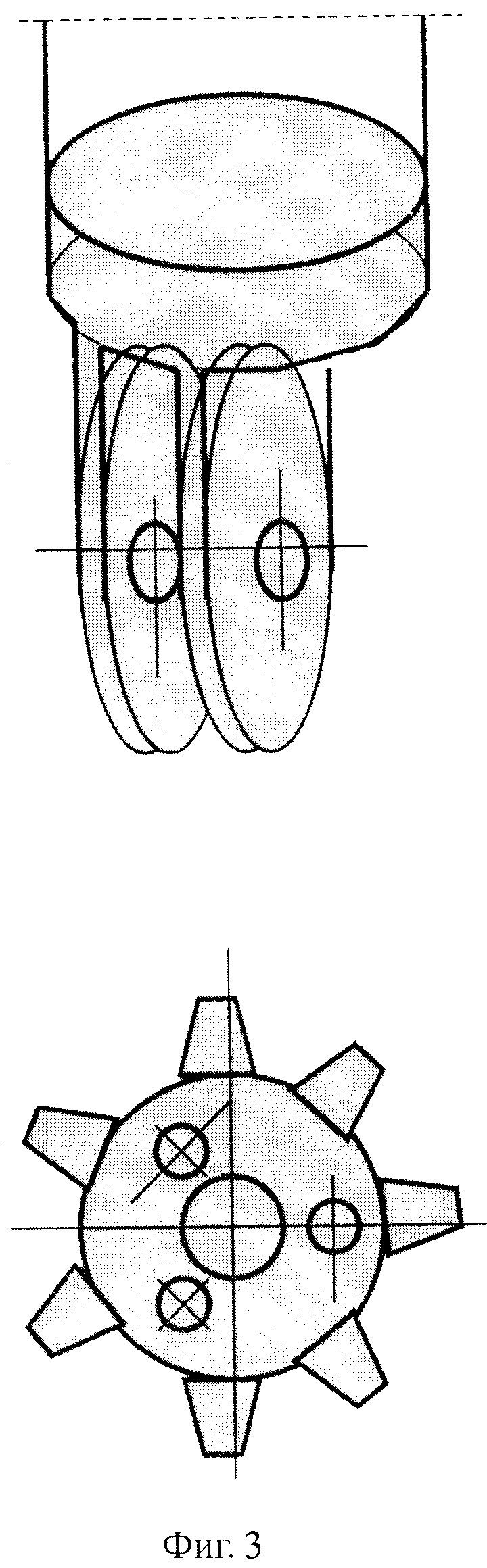
На фиг.3 представлена конструкция сустава со стороны ведомого звена (звездочка фиксируется неподвижно).
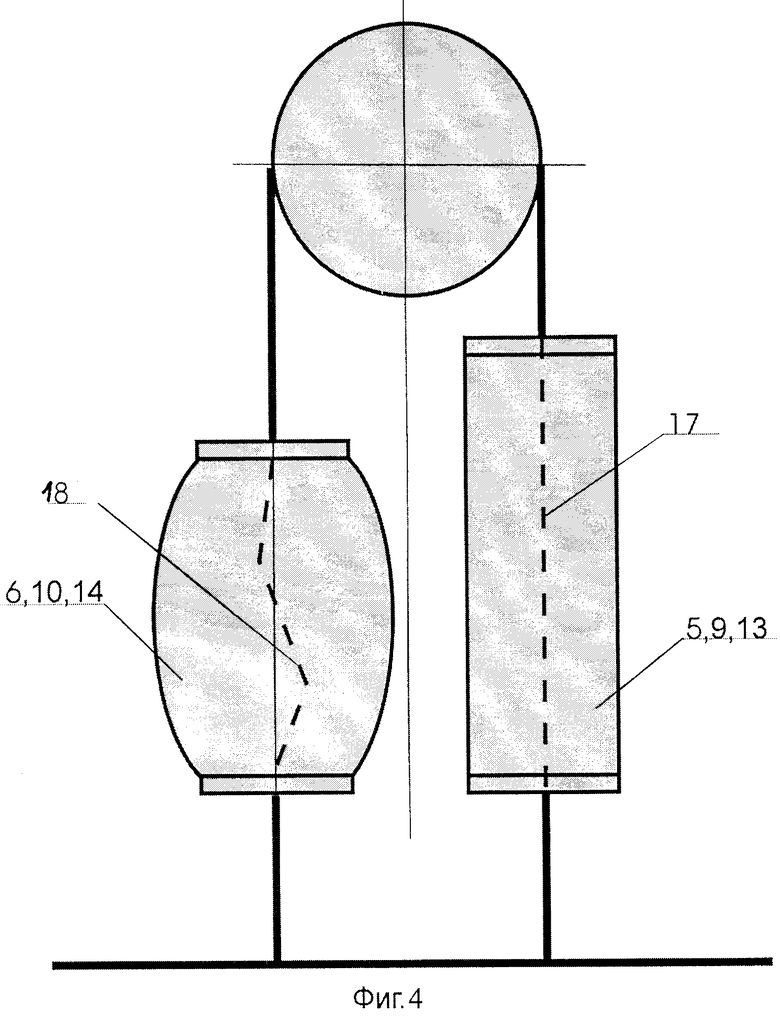
На фиг.4 представлен пневматический привод (часть) с использованием цилиндрических мышцы и антагониста.
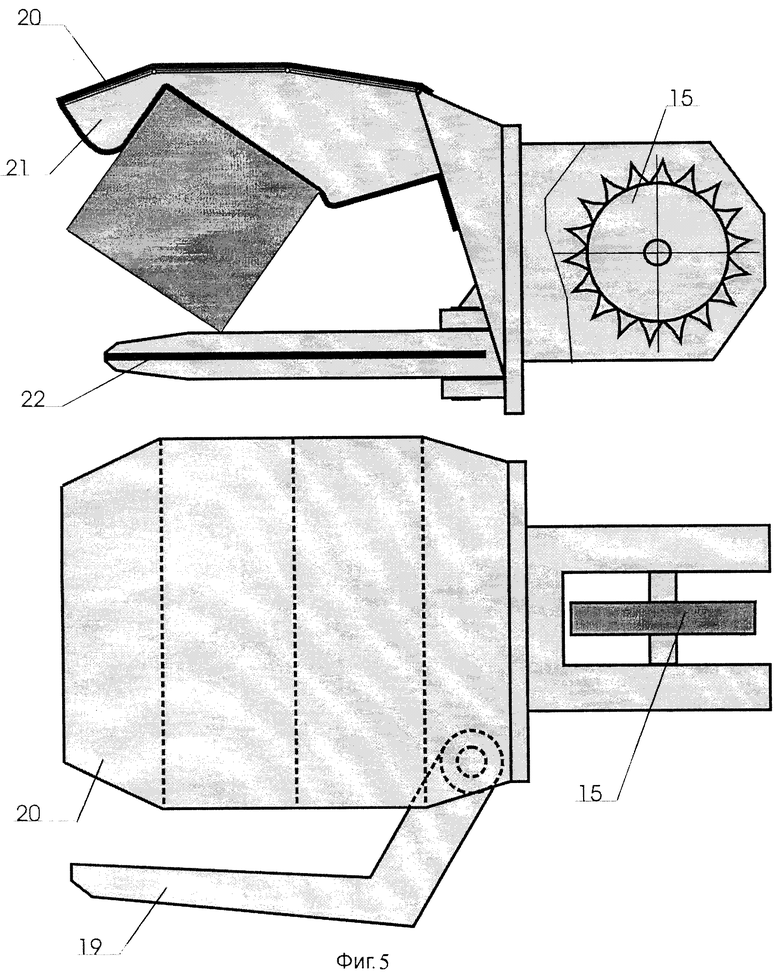
На фиг.5 представлен охват руки робота.
Х-образная труба 1 располагается вертикально, в ней закреплены пневматические цилиндрические мышца 2 и антагонист 3, является неподвижным основанием. Первое звено располагается горизонтально и представляет собой Х-образную трубу 4 с закрепленными в ней пневматической цилиндрической мышцей 5 и антагонистом 6. Далее посредством цепной передачи 7 первое звено соединено со вторым звеном, располагающимся вертикально, которое представляет собой Х-образную трубу 8, в которой закреплены пневматические цилиндрические мышца 9 и антагонист 10. Аналогично посредством цепной передачи 11 второе звено соединяется с третьим звеном, которое представляет собой Х-образную трубу 12, в которой закреплены пневматические цилиндрические мышца 13 и антагонист 14. Также посредством цепной передачи 15 с третьим звеном соединен схват 16, внутри каждой пневматической цилиндрической мышц и антагониста к донышкам крепятся гибкие металлические стержни 17, 18, предназначенные для восстановления мышце и антагонисту начальной формы.
Схват состоит из 2-х частей: одна часть 19 представляет собой подвижный элемент, который крепится на оси второй части 20, состоящей из 3-х металлических пластин, соединенных шарнирами. К внутренним сторонам каждой из частей жестко закреплены пневматические плоские мышцы 21 и 22.
Первое звено совершает вращательное движение за счет действия пневматической цилиндрической мышцы 2 либо антагониста 3 вокруг продольной своей оси, второе звено совершает вращательное движение вокруг оси звездочки цепной передачи 7 под действием пневматической цилиндрической мышцы 5 либо ее антагониста 6. Первое, второе, третье звенья и схват соединены между собой шарнирами с одной степенью свободы. Ось вращения звездочки цепной передачи 11 расположена перпендикулярно оси вращения звездочки цепной передачи 7. Ось вращения звездочки цепной передачи 15 параллельна оси вращения звездочки цепной передачи 11. Плоскость вращения первого звена перпендикулярна плоскости вращения второго звена. Плоскость вращения второго звена перпендикулярна плоскости вращения третьего звена. Плоскость вращения схвата 16 параллельна плоскости вращения третьего звена.
Для того чтобы рука могла взять предмет либо переключить какой-то рычаг, необходимо подвести схват к объекту, подать воздух (газ), при этом пневматическая плоская мышца надуется, произойдет обволакивание объекта любой формы и стягивание обеих частей схвата. Фиксация происходит с малым усилием на единицу площади объекта с достаточной надежностью и может удерживаться длительное время.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
| Манипулятор | 1979 |
|
SU770780A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
Изобретение относится к руке робота, предназначенной для выполнения технологических операций либо для использования в человекообразных роботах при ликвидации последствий аварий и катастроф, а также в условиях радиоактивного, химического или бактериологического заражений. Рука робота содержит шарнирный четырехзвенник, включающий три вращательных звена и схват. Звенья имеют вид Х-образных труб, внутри которых расположены пневматические цилиндрические мышцы и антагонисты, к донышкам которых закреплены гибкие металлические стержни. Схват имеет вид “варежки”, состоящей из двух частей: одна часть представляет собой подвижный элемент, другая часть выполнена из трех металлических пластин, соединенных шарнирами. К внутренним сторонам обеих частей жестко закреплены пневматические плоские мышцы. Передача усилий между звеньями и позиционирование схвата осуществлены посредством цепной передачи. Изобретение позволит обеспечить работоспособность в чрезвычайных ситуациях, устойчивость к радиоактивному и электромагнитному излучениям и повышение надежности. 5 ил.
Рука робота, содержащая шарнирный четырехзвенник, включающий три вращательных звена и схват, отличающаяся тем, что звенья имеют вид Х-образных труб, внутри которых расположены пневматические цилиндрические мышцы и антагонисты, к донышкам которых закреплены гибкие металлические стержни, схват имеет вид “варежки”, состоящей из двух частей: одна часть представляет собой подвижный элемент, другая часть выполнена из трех металлических пластин, соединенных шарнирами, к внутренним сторонам обеих частей жестко закреплены пневматические плоские мышцы, передача усилий между звеньями и позиционирование схвата осуществлены посредством цепной передачи.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ПРЕДМЕТОВ | 1999 |
|
RU2154569C1 |
| Система привода сустава робота на электронных мышцах | 1991 |
|
SU1815208A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

