Изобретение относится к области вооружения, а именно к ракетной технике, и может быть использовано при разработке лучевых систем телеуправления, а также при их серийном изготовлении в процессе летных испытаний.
Известны способ контроля аппаратуры системы управления ракетой и телеметрическая система контроля [1], его реализующая. Данное техническое решение выбрано нами в качестве прототипа. Известный способ контроля заключается в том, что на управляемой ракете размещают передающую часть телеметрической системы, измеряют, кодируют и передают рабочие характеристики аппаратуры ракеты и самой ракеты, которые в наземной приемной части телеметрической системы принимают, декодируют и обрабатывают, выделяя эти рабочие характеристики. Известная телеметрическая система контроля ракеты содержит аппаратуру управления ракетой, которая подключена к датчикам бортового телеметрического передатчика, связанного электромагнитным излучением с наземным телеметрическим приемником.
Известный способ контроля аппаратуры системы управления ракетой и телеметрическую систему контроля широко применяют, в том числе, и для контроля лучевой системы телеуправления.
Недостатком известных способа и устройства является необходимость размещения передающей части телеметрической системы на борту ракеты, что требует изменения конструкции, например, серийно выпускаемых ракет, т.к. в них не предусмотрены места для установки телеметрии, поскольку их параметры и характеристики оптимизированы в процессе разработки и подготовки серийного производства.
Задачей настоящего изобретения является контроль лучевой системы телеуправления, т.е. характеристик пункта управления и ракеты при размещении передающей части системы телеметрии вне ракеты.
Поставленная задача решается в способе контроля лучевой системы за счет того, что на пункте управления создают пространственную структуру электромагнитного поля, в котором параметр поля функционально связывают с координатами соответствующих точек пространства, при этом наводят на цель либо выше цели луч с нулевыми значениями командных сообщений, а на ракете измеряют параметр электромагнитного поля, определяют величину координат и формируют команды управления по курсу и тангажу; размещают в зоне распространения луча N устройств, каждое из которых преобразует параметр поля в сигналы координат по тангажу и курсу, а затем их регистрируют с момента старта ракеты, фиксируют на траектории полета положение ракеты относительно цели, при этом процесс регистрации и фиксации во времени синхронизируют, по величине зарегистрированных сигналов координат и зафиксированного отклонения ракеты от цели по курсу и тангажу делают вывод о состоянии лучевой системы телеуправления и ее составных частей.
Система контроля лучевой системы телеуправления ракетой, основанная на этом способе, содержит пункт управления, связанный электромагнитным излучением с ракетой, и телеметрическую систему; введено устройство фиксации траектории полета ракеты, размещенное рядом с пунктом управления, а телеметрическая система, размещенная в зоне распространения луча, выполнена в виде N цепочек, в каждой из которых последовательно соединены приемник и блок выделения координат, выходы по курсу и тангажу блоков выделения координат из N цепочек подключены к регистрирующему устройству, при этом приемник из каждой цепочки связан электромагнитным излучением с пунктом управления, а устройство фиксации траектории полета ракеты оптически связано с ракетой.
Заявленный способ контроля лучевой системы телеуправления реализуется следующим образом. На пункте управления создают пространственную структуру электромагнитного поля, в котором параметр поля функционально связывают с координатами соответствующих точек пространства, например в системе декартовых координат “ZOY”, где Z - величина координаты по курсу, Y - величина координаты по тангажу, 0 - начало координат, совпадающее с центром поля управления и являющееся точкой прицеливания (наведения на цель), которая образует в направлении к цели линию, т.е. луч с нулевыми значениями командных сообщений по курсу и тангажу, например равносигнальную зону [2]. В общем случае формирование поля управления осуществляют сканированием диаграммы направленности в двух взаимно перпендикулярных направлениях по “Z” и “Y”, соответственно, при этом пропорционально углу сканирования изменяют величину командных сообщений.
Изменяемым параметром электромагнитного поля может быть, например, изменение положения импульсов при импульсном режиме излучения сигнала по закону время-импульсной модуляции (ВИМ) или кодово-импульсной (КИМ) с дополнительной амплитудной модуляцией (AM) или без [2]. Ракета измеряет параметр электромагнитного поля, определяет величины координат по “Z” и “Y” и формирует команды управления, которые выводят ее на линию с нулевыми значениями командных сообщений.
Таким образом, с пункта управления направляют луч с нулевыми значениями командных сообщений на цель либо выше цели (например, при поражении цели сверху), при этом отклонение ракеты от “0” по “Z” и “Y” будет являться отклонением ракеты относительно точки прицеливания.
Перед стартом ракеты размещают в зоне распространения луча N устройств, например, равномерно от пункта управления до цели. Это легко реализовать, например, при полете ракеты параллельно поверхности земли (для противотанковых управляемых снарядов), при этом N устройств располагают на поверхности или над поверхностью на выносных штативах, а их приемную часть направляют в сторону пункта управления, при этом, например, располагают устройства параллельно линии луча с нулевыми значениями командных сообщений. Эти устройства преобразуют параметр поля, передаваемый с пункта управления, в сигналы координат по тангажу и курсу, а затем их регистрируют с момента старта ракеты.
Саму траекторию полета ракеты фиксируют с помощью теле- или кинокамеры (камер), расположенную (расположенных) рядом с пунктом управления и, например, вдоль траектории полета, тем самым оптически 4 фиксируют отклонение ракеты от цели, т.е. ее координаты “Z” и “Y” относительно “0”. При этом процесс регистрации и фиксации во времени синхронизуют.
По величине зарегистрированных сигналов координат по “Z” и “Y” и зафиксированного отклонения ракеты от цели (“0”) по курсу “Z” и тангажу “Y” путем сопоставления значений координат делают вывод о состоянии лучевой системы телеуправления и ее составных частей на траектории полета. При этом следует учитывать, что зафиксированное положение ракеты по курсу может не совпадать с величиной регистрируемой координаты (сигнала) “Z” в случае смещения N устройств влево или вправо относительно линии луча с нулевыми значениями командных сообщений, а по тангажу “Y” - вниз из-за высоты, например, штативов.
При одном регистрирующем устройстве (N=1), расположенном, например, сравнительно близко к пункту управления, следует учитывать изменение регистрируемой координаты по тангажу “Y”, например при уменьшении угловых размеров пространственной структуры электромагнитного поля, формируемого на пункте управления во времени с момента старта ракеты.
Заявленный способ позволяет однозначно идентифицировать отказы: формирование, на пункте управления неверного (искаженного) командного сообщения и неисправности ракеты, например ее аппаратуры управления, а по характеру изменений регистрируемых и фиксированных значений - конкретный блок или узел.
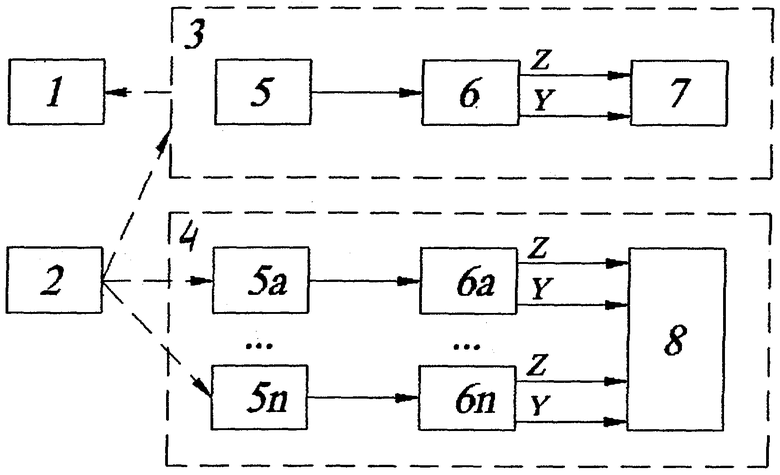
Предлагаемое изобретение поясняется чертежом, где: 1 - устройство фиксации траектории полета ракеты, 2 - пункт управления, 3 - ракета, 4 - телеметрическая система, 5, 5а...5n - приемник, 6, 6a...6n - блок выделения координат, 7 - автопилот, 8 - регистрирующее устройство.
Пункт управления 2 связан электромагнитным излучением с ракетой 3. Телеметрическая система 4 выполнена в виде N цепочек, в каждой из которых последовательно соединены приемник 5а...5n и блок выделения координат 6a...6n. Выходы по курсу и тангажу блоков выделения координат из N цепочек 6a...6n подключены к регистрирующему устройству 8. Приемники 5а...5n из каждой цепочки связан электромагнитным излучением с пунктом управления 2. Устройство фиксации траектории полета ракеты 1 оптически связано с ракетой 3.
В качестве устройства фиксации траектории полета ракеты 1 можно применить теле- или кинокамеру (камеры), радиолокационные станции и т.д., которые определяют положение испытываемой ракеты по курсу “Z” и тангажу “Y” в функции времени.
Пункт управления 2 может быть выполнен как аппаратура пункта управления [2], либо как аппаратура кодирования и уплотнения каналов [2], выходной сигнал которой Uм(t) поступает на сканирующее, например оптическое, устройство, связанное с величинами входных командных сообщений Uкc1 и Uкc2 сканируемых, соответственно по курсу “Z” и тангажу “Y”.
Пример выполнения ракеты 3 приведен на чертеже, где она состоит из последовательно выключенных приемника 5, блока выделения координат 6 (аппаратура разделения каналов и декодирования, где, например, Uк1 - координата по “Z”, Uк2 - по “Y”) и автопилота 7 [2].
В телеметрической системе 4 приемники 5а...5n и блоки выделения координат 6а...6n по выполнению аналогичны блокам, соответственно, 5 и 6. Регистрирующее устройство 8, например, многоканальный магнитофон, т.е. телеметрическая система 4 является проводной.
Заявленная система контроля лучевой системы телеуправления работает следующим образом. Пункт управления 2 формирует электромагнитное излучение в виде сканируемого луча. Это излучение попадает на приемник 5 ракеты 3, а также на приемники 5а...5n телеметрической системы 4, где оно преобразуется в электрический сигнал, например в сигнал с ВИМ.
Сигнал с выхода приемника 5 поступает на блок выделения координат 6, где в соответствии с положением ракеты в луче, выделяются электрические сигналы по курсу “Z” и тангажу “Y”, величины и знак которых соответствует отклонению ракеты от точки прицеливания, т.е. от “0”. Эти сигналы поступают на автопилот 7, который с помощью рулей отрабатывает эти сигналы и приводит ракету 3 в точку прицеливания “0”.
Аналогичным образом блоки выделения координат 6а...6n выделяют из электрических сигналов с выходов соответствующих приемников 5а...5n электрические сигналы координат “Z” и “Y”, которые записываются в регистрирующем устройстве 8.
Одновременно фиксируется устройством фиксации траектории полета ракеты 1 изменение положения ракеты относительно точки прицеливания “0” во времени с момента старта. Устройство фиксации траектории полета ракеты 1 и регистрирующее устройство 8 вырабатывают автономно метки времени, которые связывают (синхронизируют) временные последовательности событий в устройствах, т.е. величины координат “Z” и “Y”.
Таким образом, зарегистрированные к гиксиробанные временные последовательности в виде функций значений координат “Z” и “Y” во времени при их сопоставлении (с учетом разницы координат по тангажу “Y” и курсу “Z” в устройствах 1 и 8) в послеполетный период позволяет выявить причины отказов в случае их наличия.
Размещение в способе контроля лучевой системы телеуправления в зоне распространения луча N устройств, каждое из которых преобразует параметр поля в сигналы координат по тангажу и курсу, а затем их регистрируют с момента старта ракеты и фиксируют на траектории полета положение ракеты относительно цели, при этом процесс регистрации и фиксации во времени синхронизируют, по величине зарегистрированных сигналов координат и зафиксированного отклонения ракеты от цели по курсу и тангажу делают вывод о состоянии лучевой системы телеуправления и ее составных частей позволяет контролировать лучевую систему телеуправления.
Введение в устройство фиксации траектории полета ракеты, размещенное рядом с пунктом управления, и выполнение телеметрической системы, размещенной в зоне распространения луча, в виде N цепочек, в каждой из которых последовательно соединены приемник и блок выделения координат, а выходы по курсу и тангажу блоков выделения координат из N цепочек подключены к регистрирующему устройству, при этом приемник из каждой цепочки связан электромагнитным излучением с пунктом управления, а устройство фиксации траектории полета ракеты оптически связано с ракетой, позволило контролировать характеристики пункта управления и ракеты при размещении передающей части системы телеметрии вне ракеты.
Источники информации:
1 "Справочник по телеметрии" под ред. Э.Л.Грюнберга, издательство "Машиностроение", Москва, 1971 г., стр.7, стр.21-22 рис.1.3, 1.4.
2. "Основы радиоуправления" под ред. Вейцеля В.А. и Типугина В.Н., Москва, "Советское радио", 1973 г., стр.35 рис.1.14, стр.246-248, рис.4.28, стр.276, рис.5.3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕНАВЕДЕНИЯ РАКЕТЫ ПО ЛУЧУ И СИСТЕМА ТЕЛЕНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2258888C1 |
| СПОСОБ ВВОДА РАКЕТЫ В ЗОНУ ЛУЧА И КОМПЛЕКС ТЕЛЕУПРАВЛЯЕМОЙ В ЛУЧЕ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2257522C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241951C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ | 2005 |
|
RU2289086C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2291384C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2266514C1 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
Изобретение относится к области вооружения, а именно к ракетной технике. Технический результат - контроль характеристик пункта управления и ракеты при размещении передающей части системы телеметрии вне ракеты. Предложен способ контроля лучевой системы телеуправления, при котором на пункте управления создают пространственную структуру электромагнитного поля, в котором параметр поля функционально связывают с координатами соответствующих точек пространства. При этом наводят на цель либо выше цели луч с нулевыми значениями командных сообщений, а на ракете измеряют параметр электромагнитного поля, определяют величину координат и формируют команды управления по курсу и тангажу; размещают в зоне распространения луча N устройств, каждое из которых преобразует параметр поля в сигналы координат по тангажу и курсу, а затем их регистрируют с момента старта ракеты и фиксируют на траектории полета положение ракеты относительно цели. При этом процесс регистрации и фиксации во времени синхронизируют, по величине зарегистрированных сигналов координат и зафиксированного отклонения ракеты от цели по курсу и тангажу делают вывод о состоянии лучевой системы телеуправления и ее составных частей. Способ реализован системой контроля лучевой системы телеуправления, содержащей пункт управления, связанный электромагнитным излучением с ракетой, и телеметрическую систему; введено устройство фиксации траектории полета ракеты, а телеметрическая система выполнена в виде N цепочек, в каждой из которых последовательно соединены приемник и блок выделения координат, выходы по курсу и тангажу блоков выделения координат из N цепочек подключены к регистрирующему устройству, при этом приемник из каждой цепочки связан электромагнитным излучением с пунктом управления, а устройство фиксации траектории полета ракеты оптически связано с ракетой. 2 н.п. ф-лы, 1 ил.
| Справочник по телеметрии | |||
| Под ред | |||
| Грюнберга Э.Л | |||
| - М.: Машиностроение, 1971, с.7, 21, 22 | |||
| US 5131602 А, 21.07.1992 | |||
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ИСПОЛЬЗОВАНИЕМ ВИЗУАЛЬНОГО СЛЕЖЕНИЯ ЗА СНАРЯДОМ ПО СВЕТОВОМУ ИЗЛУЧЕНИЮ И УПРАВЛЯЕМЫЙ СНАРЯД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089836C1 |
| US 4315609 А, 16.02.1982. | |||

