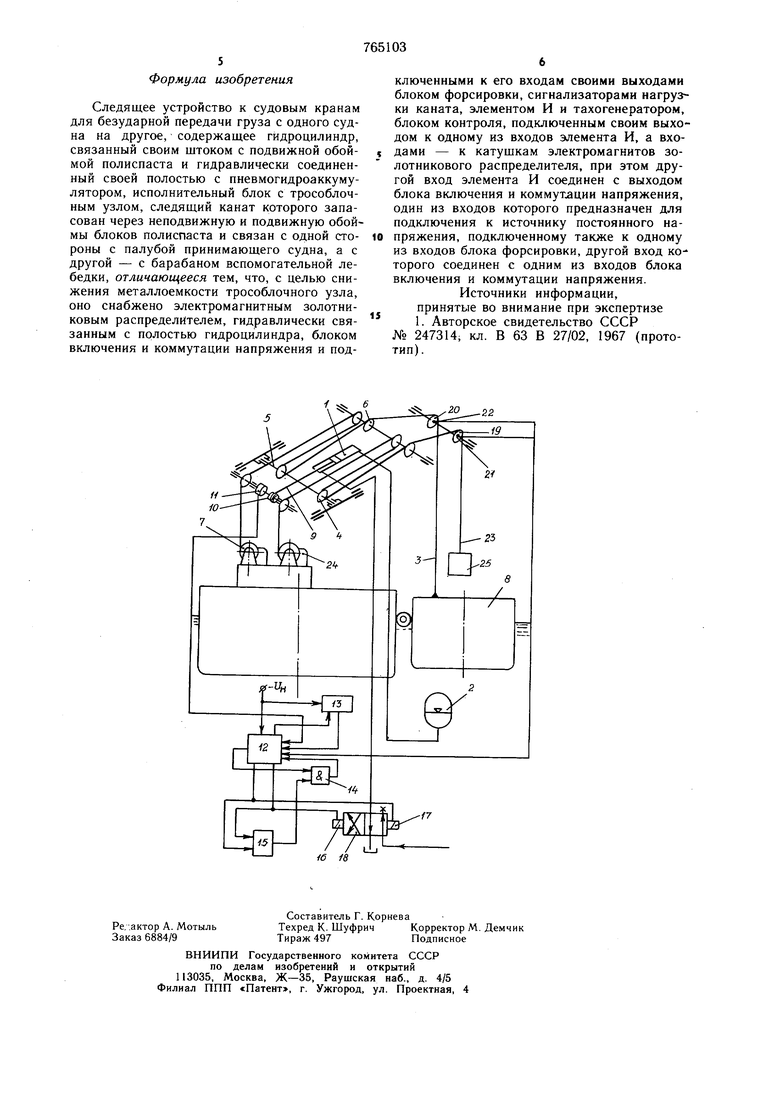
На чертеже изображена функциональная схема устройства.
Устройство включает в себя гидроцилиндр 1, полость которого соединена с пневмогидроаккумулятором 2, трособлочный узел, следящий канат 3 которого запасован через подвижную обойму блоков 4 полиспаста, жестко соединенную посредством траверсы 5 со штоком гидроцилиндра 1, и неподвижную обойму блоков 6 полиспаста, закрепленную на стреле крана, причем один конец следящего каната 3 заведен на барабан вспомогательной лебедки 7, а другой конец закреплен на палубе принимающего судна 8. С траверсой 5 соединена гибкой связью 9 подпружиненная вьюшка 10, на валу которой закреплен тахогенератор 11, выход которого подсоединен к блоку 12 включения и коммутации напряжения, электрически связанному с блоком 13 форсировки и элементом И 14, соединенным с блоком 15 контроля. Выходы блока 12 соединены с электромагнитами 16 и 17 золотникового распределителя 18, который в свою очередь гидравлически подключен к полости гидроцилиндра 1. На блоках 19 и 20 трособлочного узла установлены соответственно сигнализаторы 21 и 22 нагрузки каната, которые соединены со входом блока 12 включения и коммутации. Вьюшка 10 закреплена на металлоконструкции крана. Через подвижную и неподвижную обоймы блоков 4 и 6 полиспаста запасован грузовой канат 23, который с одной стороны намотан на барабан грузовой лебедки 24, а с другой стороны соединен с грузом 25.
Устройство работает следующим образом.
При работе без груза 25 и ввода следящего устройства в действие, при движении палубы принимающего судна с вершины волны в ее подощву в следящем канате появляется усилие натяжения, которое при достижении значения, равного величине усилия натяжения при работе с грузом 25, воздействует на сигнализатор 22 нагрузки, в результате чего последний выдает управляющий сигнал на блок 12 включения и коммутации напряжения, при этом сигнал от сигнализатора 21 нагрузки не подается, так как отсутствует груз 25. Номинальное напряжение с выхода блока 12 включения и коммутации напряжения подается на первый вход элемента И 14, ко второму входу которого поступает сигнал от блока 15 контроля. Управляющий сигнал с вь1хода элемента И 14 воздействует на коммутирующие элементы блока 12 включения и коммутации напряжения, в результате срабатывания которых форсирующее напряжение от блока 13 форсировки подается на электромагнит 16 золотникового распределителя 18, обеспечивая его мгновенное переключение. Сигнал переключения золотникового распределителя 18 поступает на вход блока 15 контроля.
выходной сигнал которого воздействует на элемент И 14, вследствие чего электромагнит 16 переводится на питание с форсированного напряжения на номинальное. В результате переключения золотникового распределителя 18 рабочая жидкость от насоса подается в полость гидроцилиндра 1, обеспечивая тем самым снижение натяжения в следящем канате 3 при работе с грузом 25. Одновременно с этим рабочая жидкость, находящаяся в полости гидроцилиндра 1,
поступает в пневмогидроаккумулятор 2. В процессе ввода следящего устройства в действие вспомогательная лебедка 7 выбирает следящий канат 3, после чего она отключается.
При последующем движении палубы принимающего судне. 8 с подощвы волны на ее верщину тахогенератор 11 вырабатывает сигнал определенной полярности, например « + , вследствие чего происходит срабатывание в форсированном режиме с последующим переводом на номинальное напряжение электромагнита 17 золотникового распределителя 18, в результате переключения которого рабочая жидкость из гидроцилиндра 1 поступает на слив, обеспечивая тем самым свободное перемещение поршня гидроцилинд ра 1 под действием рабочей жидкости пневмогидроаккумулятора 2. Одновременно с этим электромагнит 16 золотникового распределителя 18 обесточивается.
После ввода следящего устройства в действие в последующих движениях палубы принимающего судна 8 с верщины волны в ее подошву за счет управляющего сигнала тахогенератора 11, соответствующего предыдущему состоянию движения палубы (движение с подошвы волны на ее вершину), происходит переключение коммутирующих элементов блока 11 включения и коммутации напряжения, в результате чего происходит срабатывание в форсированном режиме с последующим автоматическим переключением на номинальное напряжение электромагнита 17. Вращение тахогенератора 11 осуществляется подпружиненной вьюшкой 10, соединенной гибкой связью 9 с подвижной траверсой 5. В свою очередь с помощью
5 грузовой лебедки 24 осуществляется травление (выбирание) с грузовой скоростью грузового каната 23, при этом спуск (подъем) холостого гака происходит в режиме слежения по отнощению к палубе принимающего судна 8 при стабилизированном значении
усилия натяжения в следящем канате 3. При работе с грузом 25 управляющий сигнал с выхода сигнализатора 4 нагрузки поступает на вход блока 12 включения и коммутации напряжения, в результате чего отключается схема форсировки электромагнитов 16 и 17, а золотниковый распределитель 18 устанавливается в положение, при котором гидроцилиндр 1 сообщается со сливом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Устройство для передачи груза между судами в море | 1974 |
|
SU543545A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Система передачи груза с судна на судно | 1980 |
|
SU935372A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1977 |
|
SU747769A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Судовое устройство для спуска и подъема катеров | 1975 |
|
SU550312A1 |
