Настоящее изобретение относится к аппарату вращения, работающему в условиях микрогравитации, с помощью которого выполняют эксперименты в состоянии микрогравитации в космосе.
Известный уровень техники
Известен аппарат вращения, работающий в условиях микрогравитации (см. FR, А, 2257077), содержащий кожух, вращающийся вал, установленный внутри указанного кожуха обоими концами в подшипниках так, что он приводится во вращение с помощью двигателя, и множество кронштейнов, проходящих радиально, один из концов каждого из которых установлен на указанном вращающем валу, при этом на других концах кронштейнов установлено множество коробок, в которые помещены объекты, имеющие определенный вес.
В упомянутом аппарате вращения коробки - экспериментальные контейнеры - установлены на концах держателей так, что их конечные части имеют большие размеры. Кроме того, хотя сам аппарат вращения выполнен симметричным относительно оси вращения, в экспериментальных контейнерах содержатся экспериментальные объекты различных видов и различных размеров, и при этом возникает дисбаланс веса между экспериментальными объектами, находящимися в них. Поэтому при вращении возникают вибрации на валу вращения, а также на держателях и экспериментальных контейнерах, что приводит к вибрации кожуха аппарата, а также к перемещению экспериментальных объектов или отрицательно на них влияет. В условиях микрогравитации в космическом пространстве, когда экспериментальные объекты помещены внутрь экспериментальных контейнеров аппарата вращения, которые вращаются так, что выполняются эксперименты, на валу вращения и кожухе аппарата возникает вибрация из-за несбалансированности каждого из экспериментальных контейнеров. Такая вибрация распространяется на окружающую среду через кожух и влияет на оборудование, находящееся в окружающем пространстве, и на само устройство, а также на его управление.
Краткое описание изобретения
С учетом вышеуказанных проблем известного уровня техники в основу настоящего изобретения поставлена задача создать аппарат вращения, работающий в условиях микрогравитации, в котором бы случайные вибрации кожуха, возникающие в аппарате вращения в условиях микрогравитации в космическом пространстве, подавлялись, и вращение аппарата было бы стабилизировано.
Поставленная задача решается тем, что аппарат вращения, работающий в условиях микрогравитации, содержащий кожух, вращающийся вал, установленный внутри указанного кожуха обоими концами в подшипниках так, что он приводится во вращение с помощью двигателя, и множество кронштейнов, проходящих радиально, один из концов каждого из которых установлен на указанном вращающемся валу, при этом на других концах кронштейнов установлено множество коробок, в которые помещены объекты, имеющие определенный вес, согласно изобретению, содержит устройства подавления вибрации кожуха, посредством которых кожух установлен на неподвижной опоре в каждом из множества мест его внешней поверхности, при этом каждое устройство подавления вибрации содержит пружинный механизм, упруго удерживающий кожух на соответствующем элементе неподвижной опоры, и электромагнитный механизм установки, содержащий закрепленный на элементе неподвижной опоры проводник и охватывающую его катушку возбуждения, установленную на поверхности кожуха и соединенную с пружинным механизмом так, что обеспечено электромагнитное удержание указанного кожуха посредством электромагнитной силы, действующей на указанный проводник со стороны катушки возбуждения при ее возбуждении от источника тока.
Возможно, чтобы устройство подавления вибрации дополнительно содержало датчик зазора, способный определять зазор между кожухом и элементом неподвижной опоры, и блок управления, приспособленный для приема сигналов, определяемых датчиком зазора, и, в случае определения, что указанный зазор превышает заранее определенный диапазон, управляющий током возбуждения катушки возбуждения с целью уменьшения вибрации.
Возможно, кроме того, чтобы устройство подавления вибрации дополнительно содержало датчик зазора, способный определять зазор между кожухом и элементом неподвижной опоры, и блок управления, приспособленный для приема сигналов, определяемых датчиком зазора, определения изменений зазора по принимаемым сигналам, и обеспечения такого управления приводом, которое компенсирует указанные изменения зазора так, чтобы уменьшать вибрацию.
При этом целесообразно, чтобы пружинный механизм содержал элемент рамы, установленный на кожухе, элемент рамы, закрепленный на элементе неподвижной опоры, и пружину, соединяющую элемент рамы, установленный на кожухе, и элемент рамы, закрепленный на неподвижной опоре, а в указанном механизме электромагнитного удержания катушка возбуждения была бы установлена на элементе рамы, связанном с кожухом, а проводник установлен на соответствующем элементе рамы, закрепленном на неподвижной опоре.
Предпочтительно, чтобы блок управления поддерживал заранее определенный зазор между проводником и элементом рамы, связанным с кожухом.
Желательно, чтобы в пружинном механизме была использована одна или большее количество стержневых пружин.
При этом предпочтительно, чтобы в пружинном механизме была использована одна или большее количество стержневых витых пружин.
В другом предпочтительном варианте в пружинном механизме использован один или большее количество элементов, изготовленных из резины, пластмассы или подобного материала, который имеет заранее определенную упругость.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его осуществления и прилагаемыми чертежами, на которых:
фиг.1 изображает аппарат вращения в соответствии с настоящим изобретением, вид сбоку в разрезе;
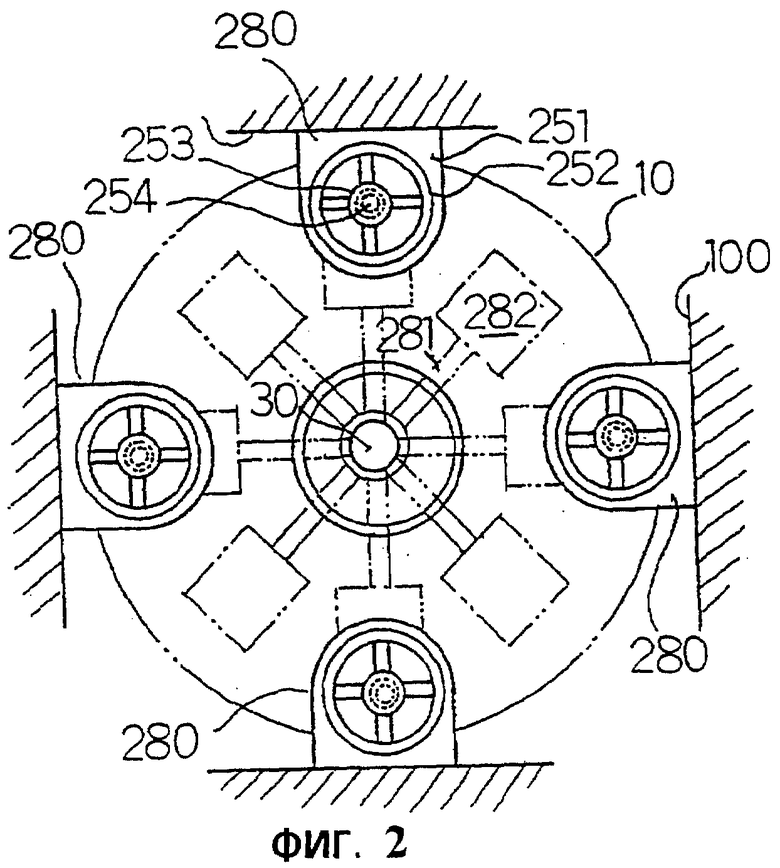
фиг.2 - разрез по линии Х-Х на фиг.1;
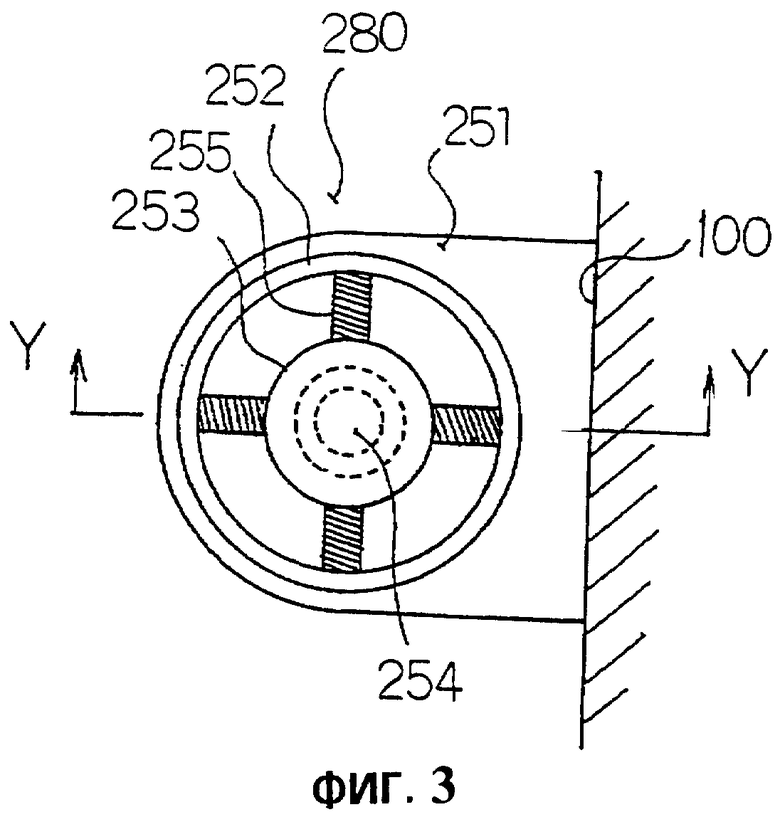
фиг.3 - устройство подавления вибрации аппарата вращения, согласно изобретению, вид сверху;
фиг.4 - разрез по линии Y-Y на фиг.3;
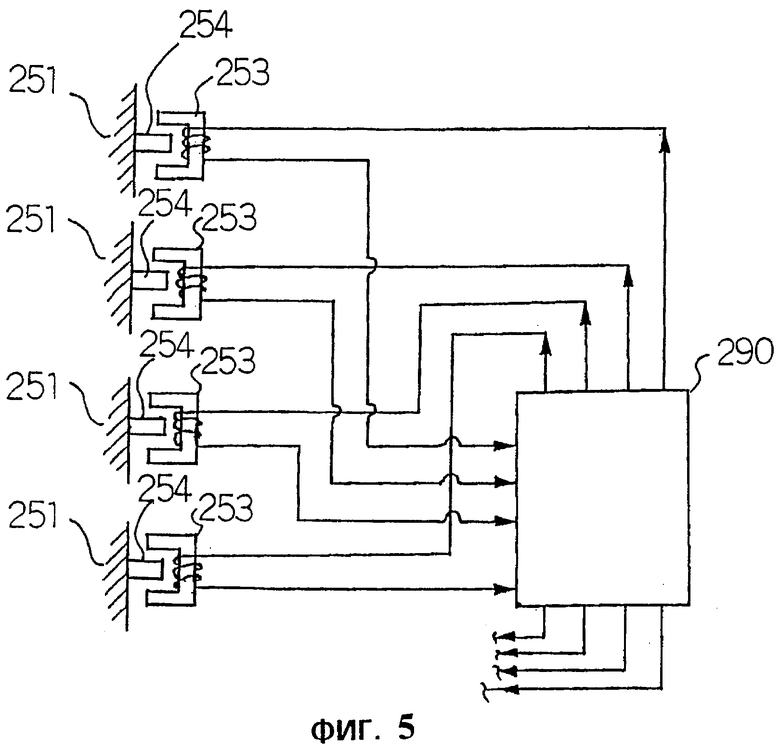
фиг.5 - конструкцию цепи возбуждения устройства подавления вибрации;
фиг.6 - цепь возбуждения катушки устройства подавления вибрации в аппарате вращения;
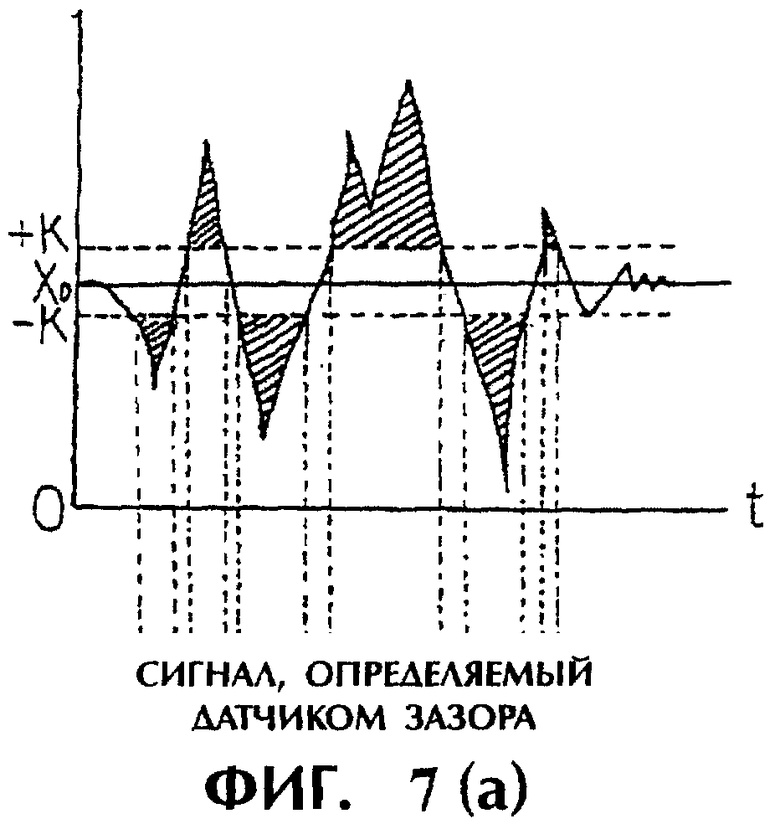
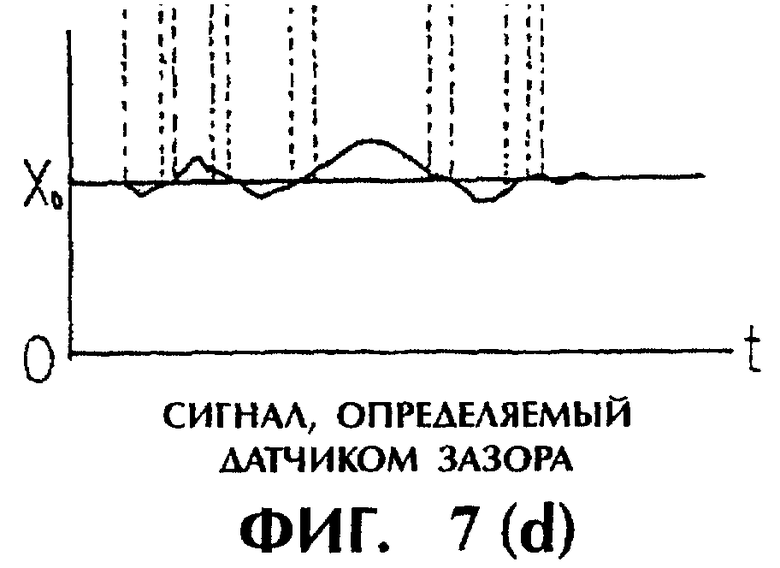
фиг.7(а) - форму вибрационных колебаний датчика зазора в варианте аппарата вращения по фиг.6;
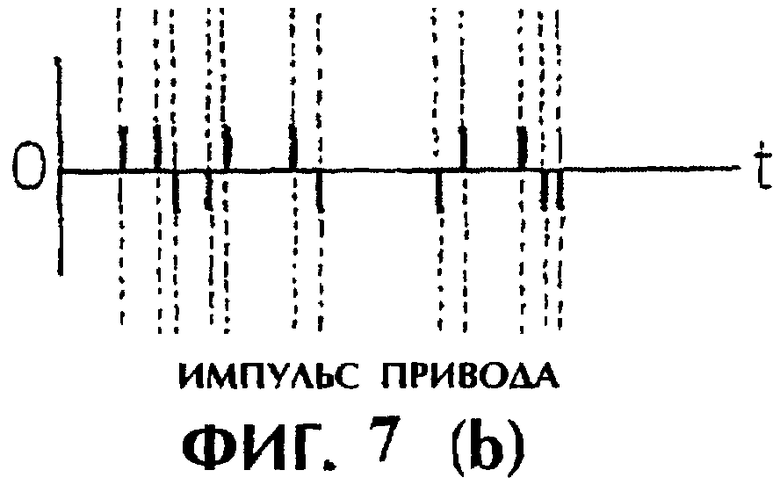
фиг.7(b) - изменение во времени импульса привода блока управления;
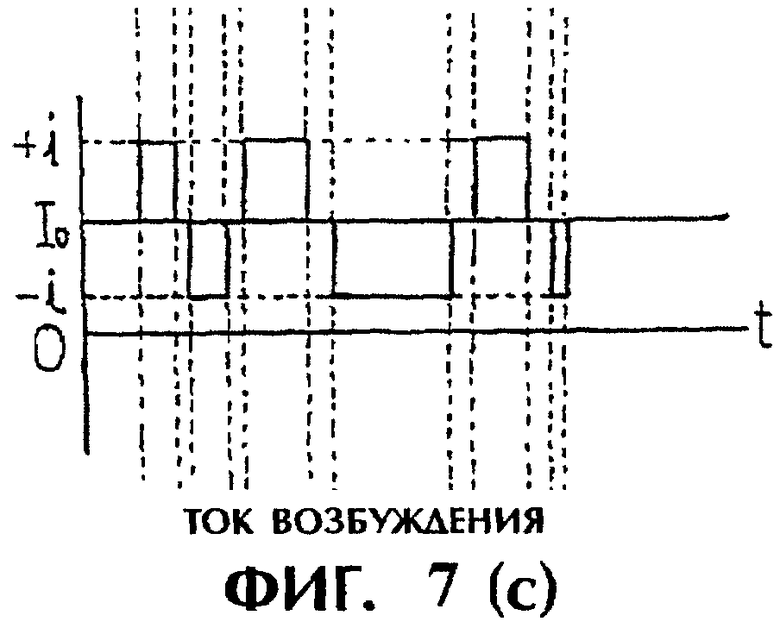
фиг.7(с) - форму колебаний тока возбуждения;
фиг.7(d) - форму вибрационных колебаний после подавления вибрации;
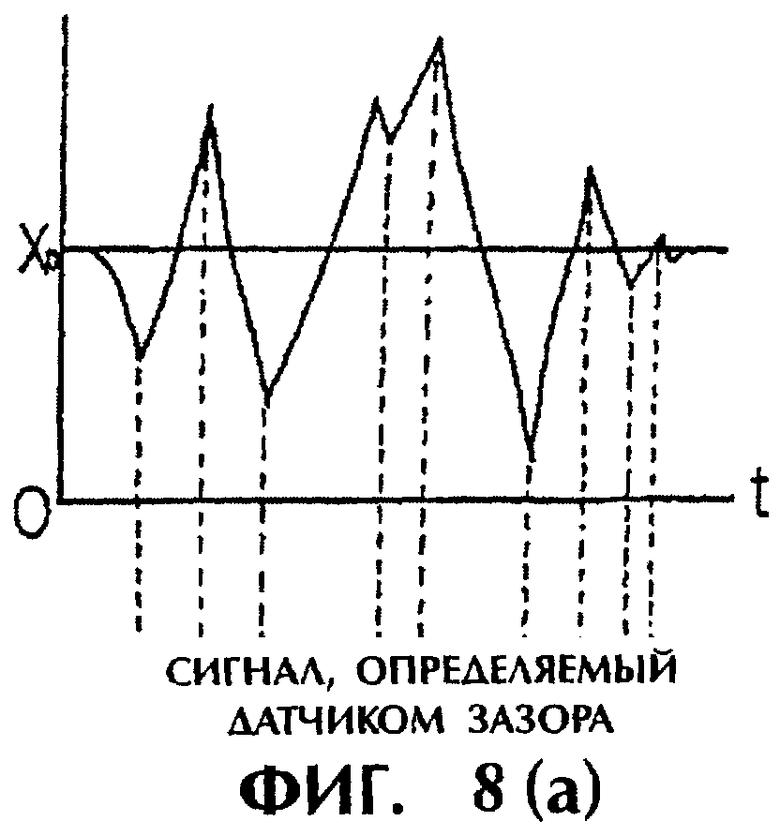
фиг.8(а) - форму вибрационных колебаний датчика зазора в другом варианте аппарата вращения;
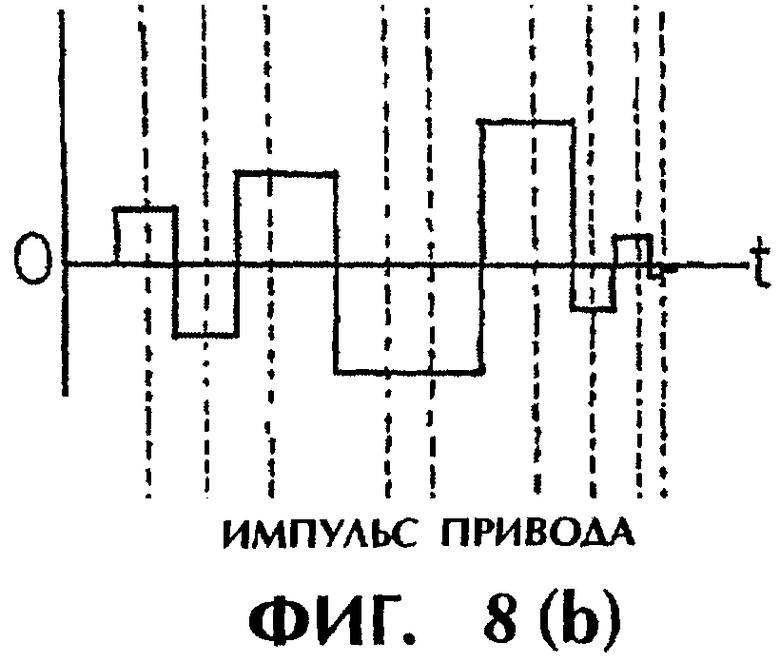
фиг.8(b) - изменение во времени импульса привода блока управления;
фиг.8 (с) - форму колебаний тока возбуждения;
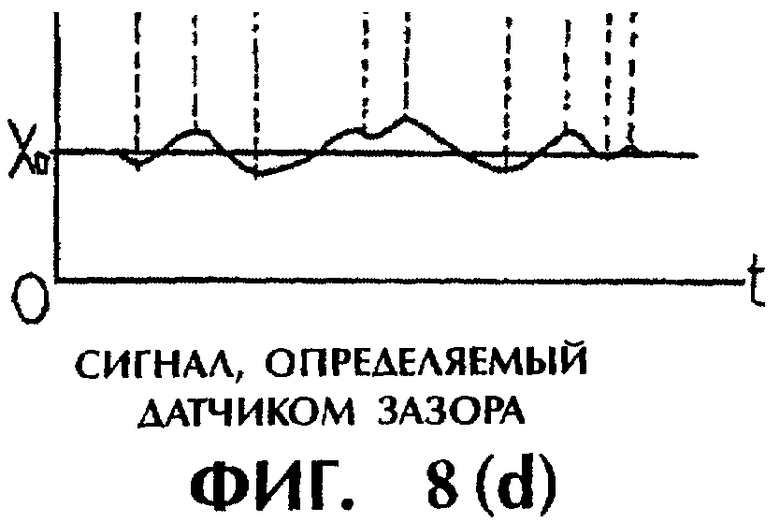
фиг.8 (d) - форму вибрационных колебаний после подавления вибрации;
На фиг.1 и 2 изображен аппарат вращения в виде сбоку в поперечном разрезе и на фиг.2 в разрезе по линии Х-Х в направлении стрелок, изображенных на фиг.1. На фиг.1 кожух 10 установлен на неподвижной опоре 100 через устройства 280 подавления вибрации.
В кожухе 10 оба конца вращающегося вала 30 установлены на подшипниках 11, 12. В качестве подшипников 12 могут использоваться любые магнитные подшипники, установленные на пружинах, или подшипники, установленные на эластичном или пластмассовом материале, подшипники на воздушной подушке, пружинные или демпфирующие подшипники, подшипники, скомпонованные с двигателем, или подшипники гидравлического типа и т.д. Множество кронштейнов 281 (в изображенном примере восемь кронштейнов), один из концов каждого из которых закреплен на вращающемся валу 30, другой конец несет экспериментальную коробку 282, и вращающийся вал 30 приводятся во вращение с помощью двигателя 13.
Каждое из устройств 280 подавления вибрации установлено на неподвижной опоре 100 посредством элемента 251 держателя, на котором установлена рама 252 держателя. На поверхности кожуха 10, обращенной к устройству 280 подавления вибрации, установлена катушка 253, при этом четыре пружины 255 установлены между катушкой 253 и внутренней стороной рамы 252 держателя так, что они соединяют их. Проводник 254 закреплен на неподвижном элементе 251 держателя так, что он входит в центральную зону катушки 253 без контакта с ней, причем между проводником 254 и катушкой 253 поддерживается заранее определенный зазор.
В качестве вышеуказанных пружин 255 могут использоваться стержневые пружины, витые стержневые пружины, пружины, изготовленные из упругих материалов или резины, пластмассы и т.д., имеющие соответствующую упругость.
В настоящем варианте воплощения, как видно на фиг.2, изображен пример, в котором восемь кронштейнов 281 установлены на вращающемся валу 30, и восемь экспериментальных коробок 282 установлены на восьми кронштейнах 281. Однако, само собой разумеется, что может использоваться аппарат вращения, в котором содержатся четыре экспериментальных коробки, закрепленные на четырех кронштейнах. Кроме того, хотя устройства 280 подавления вибрации установлены так, что кожух 10 закреплен на неподвижной опоре 100 в четырех точках с верхней и нижней сторон кожуха 10, могут быть установлены два или три, или больше чем четыре, устройства 280 подавления вибрации на одной стороне и соответствующее их количество может быть установлено в соответствии с техническими условиями аппарата вращения.
В изображенном примере кожух 10 упруго установлен на неподвижной опоре 100 с помощью устройства 280 подавления вибрации в четырех местах на каждой поверхности верхней и нижней сторон, как указано выше, то есть всего в восьми местах кожуха 10. Катушка 253 закреплена на кожухе 10 и соединена с рамой 252 держателя устройства 280 подавления вибрации посредством четырех пружин 255. То есть кожух 10 упруго установлен на неподвижной опоре 100 посредством пружины 255, рамы 252 держателя и элемента 251 держателя.
В дополнение к упругому держателю кожуха 10 посредством пружин 255 кожух 10 дополнительно упруго установлен, благодаря электромагнитной силе, создаваемой между катушкой 253 и проводником 254 неподвижной опоры. То есть катушка 253 содержит катушку возбуждения, как будет описано ниже, и когда она возбуждается, сила притяжения или сила отталкивания создается благодаря электромагнитной силе с ее помощью поддерживается проводник 254, закрепленный на неподвижной опоре. Поскольку проводник 254 соединен с элементом 251 держателя, это приводит к тому, что кожух 10 удерживается на неподвижной опоре 100 также с помощью электромагнитной силы катушки 253.
На фиг.3 и 4 изображено в увеличенном виде устройство 280 подавления вибрации по фиг.1, 2, при этом фиг.3 изображает вид сверху и фиг.4 изображает разрез по линии Y-Y на фиг.3. Как показано, катушка 253 кожуха 10 закреплена на нем и упруго соединена с рамой 252 держателя посредством четырех пружин 255. Рама 252 держателя закреплена на элементе 251 держателя, который установлен на неподвижной опоре 100 так, что кожух 10 упруго удерживается на неподвижной опоре 100 пружинами 255. Кроме того, проводник 254 установлен в центральной части катушки 253, которая закреплена на кожухе 10 без образования контакта и с поддержанием заранее определенного зазора между катушкой 253 и проводником 254 и, когда катушка 253 возбуждается, сила притяжения или сила отталкивания, создаваемая электромагнитной силой, воздействует на проводник 254. Затем, в соответствии с принципом электромагнитного подшипника, катушка 253 устанавливается по отношению к проводнику 254, то есть на неподвижной опоре 100 с помощью электромагнитной силы.
На фиг.5 изображена конструкция цепи возбуждения катушки 253 в соответствии с настоящим вариантом воплощения, где цепь возбуждения показана для четырех точек на одной стороне кожуха 10, а цепь для другой стороны опущена. На этом чертеже источник 290 электрического возбуждения создает ток возбуждения катушек 253 четырех устройств 280 подавления вибрации, причем этот ток возбуждения создает в катушке 253 электромагнитную силу, которая может воздействовать на проводники 254 неподвижной опоры, которые установлены внутри катушек 253 так, что заранее определенные зазоры поддерживаются между катушками 253 и проводниками, чтобы удерживать катушки 253 и соответственно кожух 10, на котором установлены катушки 253. Следует отметить, что, в соответствии с настоящим вариантом воплощения, соответствующие катушки 253, установленные в восьми местах, непрерывно запитаны током возбуждения постоянного уровня.
В соответствии с данным вариантом воплощения, как указано выше, конструкция выполнена таким образом, что корпус 10 удерживается в восьми местах с его верхней и нижней сторон с помощью устройств 280 подавления вибрации. Устройство 280 изоляции вибрации упруго удерживает кожух 10 с помощью пружин 255 и, одновременно, электромагнитные силы, действующие между катушками 253 и проводником 254 неподвижной опоры, также удерживают кожух 10. Следовательно, благодаря упругому механическому креплению и электромагнитному удержанию, поглощается вибрация кожуха 10. При этом вибрация может эффективно поглощаться с помощью устройств 280 подавления вибрации без передачи ее окружающей среде через части крепления.
На фиг.6 изображена цепь возбуждения катушки устройства подавления вибрации в аппарате вращения в соответствии с другим вариантом воплощения настоящего изобретения, причем цепь изображена для четырех мест на одной стороне кожуха 10, а для другой стороны опущена. В этом втором варианте воплощения конструкция выполнена таким образом, что датчик 291 зазора установлен на устройстве 280 подавления вибрации. С помощью датчика 291 зазора определяется зазор между элементом 251 держателя и катушкой 253 и, если этот зазор становится большим или меньшим, чем заранее определенное значение, ток возбуждения увеличивается или уменьшается таким образом, чтобы управлять поддержанием величины зазора с помощью электромагнитной силы для поглощения вибрации. Конструкция других частей устройства 280 подавления вибрации выполнена аналогичной предыдущему варианту воплощения, изображенному на фиг.1, 2, 3 и 4.
На фиг.6 датчик 291 зазора установлен в каждом устройстве 280 подавления вибрации для определения зазора между элементом 251 держателя и кожухом 10 или катушкой 253, и сигналы, соответствующие определенному ими зазору, поступают в блок 293 управления. Каждая из катушек 253 запитана постоянным током возбуждения от источника 290 электрического возбуждения. Если в кожухе 10 имеет место вибрация и зазор между кожухом 10 и неподвижной опорой становится большим или меньшим, чем заранее определенное значение, блок 293 управления, который непрерывно отслеживает сигналы каждого из датчиков 291 зазора, определяет изменения в зазоре и производит управление для увеличения или уменьшения тока возбуждения так, чтобы зазор возвратился к заранее определенному значению. Благодаря этому могут поглощаться вибрации, возникающие в кожухе 10.
Фиг.7(а)-(d) приведены для пояснения управления током возбуждения в варианте воплощения, описанном выше, при этом фиг.7(а) изображает форму сигнала вибрационных колебаний, определяемого датчиком 291 зазора по оси t времени. Фиг.7(b) изображает изменение во времени импульсов привода, вырабатываемых блоком управления 293, фиг.7(с) изображает форму колебаний тока возбуждения, подаваемого от источника 290 электрического возбуждения, и фиг.7(d) изображает форму вибрационных колебаний после их подавления, которая определяется датчиком 291 зазора.
На фиг.7(а) в случаях, когда определяемый сигнал датчика 291 зазора превышает заранее установленное значение ±К, блок 293 управления вырабатывает сигнал импульса привода, который изображен на фиг.7(b). Этот сигнал импульса привода поступает на источник 290 электрического возбуждения. Затем, как показано на фиг.7(с), только в течение этого сигнала импульса привода, который имеет собой плюс или минус, постоянный опорный ток I0 увеличивается или уменьшается на постоянную величину тока i возбуждения. Таким образом, увеличенный или уменьшенный ток возбуждения, который показан на фиг.7(с), становится током возбуждения, который подавляет соответствующие вибрации, что приводит к снижению возникающих вибраций, представленных на фиг.7(а) так, что зазор может стремиться к заранее определенной опорной величине зазора Х0, которая показана на фиг.7(d).
На фиг.8(а)-(d) приведено пояснение управления током возбуждения в соответствии с другим вариантом воплощения настоящего изобретения, где фиг.8(а) изображает форму сигналов, определяемых датчиком зазора, фиг.8(b) изображает импульсы привода, вырабатываемые блоком 293 управления, фиг.8(с) изображает форму колебаний тока возбуждения и фиг.8(d) изображает форму вибрационных колебаний после их подавления. В этом варианте воплощения устройство 280 подавления вибрации выполнена аналогично показанному на фиг.6. Блок 293 управления принимает сигналы, определяемые каждым из датчиков 291 зазора, и вычисляет сигналы привода, которые вырабатывают электромагнитную силу, направленную в противоположном направлении, которая компенсирует определяемую вибрацию. Благодаря этому, осуществляется активное управление вибрацией с помощью тока возбуждения.
В соответствии с формой колебаний сигнала, определяемого датчиком зазора, изображенного на фиг.8(а), блок 293 управления принимает сигналы от датчика 291 зазора, соответствующие величине сигналов вибрации, вычисляет сигналы привода в виде прямоугольных колебаний большей или меньшей величины, которые компенсируют эту вибрацию. На фиг.8(с) источник 290 электрического возбуждения принимает сигналы привода, изображенные на фиг.8(b), для создания тока возбуждения, соответствующего величине сигнала привода, и подает ток возбуждения в каждую из катушек 253 так, чтобы он добавлялся к заранее определенному опорному току I0. Ток возбуждения по фиг.8(с) создает электромагнитную силу, которая активно компенсирует вибрацию, изображенную на фиг.8(а), что приводит к снижению вибрации так, что зазор может стремиться к заранее определенной опорной величине зазора Х0.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПОРЫ РОТАТОРА В УСТРОЙСТВЕ ВРАЩЕНИЯ | 2001 |
|
RU2249732C2 |
| УСТРОЙСТВО ВРАЩЕНИЯ В УСЛОВИЯХ МИКРОГРАВИТАЦИИ (ВАРИАНТЫ) | 2001 |
|
RU2245282C2 |
| ЭЛЕКТРОМАГНИТНЫЙ КОНТАКТОР | 1973 |
|
SU374874A1 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2585711C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ СИСТЕМА ИССЛЕДОВАНИЯ С ПОДВИЖНЫМ ДЕРЖАТЕЛЕМ ПАЦИЕНТА | 2016 |
|
RU2708817C2 |
| Станок для роспуска трикотажного полотна | 1982 |
|
SU1358789A3 |
| Мотор-колесо с динамоэлектрической машиной для передвижения тягового автомобиля | 1983 |
|
SU1321363A3 |
| Сервопривод | 1981 |
|
SU1451786A1 |
| СИСТЕМА И СПОСОБ ПОЛУЧЕНИЯ ОПТИЧЕСКОГО ВОЛОКНА | 2018 |
|
RU2773163C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ НА ПОРОШКИ СВЕРХПРОВОДЯЩИХ СОЕДИНЕНИЙ | 2013 |
|
RU2556185C1 |



Изобретение относится к оборудованию космических кораблей и орбитальных станций и может быть использовано для проведения экспериментов на их борту. Предлагаемый аппарат вращения содержит кожух (10), вал (30), установленный в подшипниках (11) внутри кожуха, и двигатель (13) вращения вала. На валу (30) закреплены радиальные кронштейны (281), на концах которых установлено множество коробок (282) с (экспериментальными) объектами. Предусмотрены устройства подавления вибрации кожуха, каждое из которых содержит пружинный механизм (255), упруго удерживающий кожух (10) на соответствующем элементе (280) неподвижной опоры, и электромагнитный механизм установки. Данный механизм содержит закрепленный на элементе (280) проводник (254) и охватывающую его катушку возбуждения (253), установленную на поверхности кожуха (10). Катушка соединена с пружинным механизмом так, что обеспечено удержание кожуха (10) посредством электромагнитной силы, действующей на проводник (254) при возбуждении катушки. Могут быть предусмотрены датчик, определяющий зазор между кожухом (10) и элементом (280) опоры, и блок управления, принимающий сигналы этого датчика. При превышении заранее определенной величины зазора данный блок управляет током возбуждения катушки (253) с целью уменьшения вибрации кожуха. Технический результат изобретения состоит в обеспечении стабилизации вращения аппарата и подавлении случайных вибраций его кожуха. 7 з.п. ф-лы, 8 ил.
| СПОСОБ ПРОИЗВОДСТВА СРЕДСТВА ДЛЯ ОБРАБОТКИ РАСТЕНИЙ | 2003 |
|
RU2257077C2 |
| Центробежный измеритель массы | 1977 |
|
SU732681A1 |
| Устройство для определения массы тела в невесомости | 1982 |
|
SU1073580A1 |
| СВЕРХПРОВОДЯЩИЙ МАГНИТНЫЙ ПОДВЕС | 1991 |
|
RU2018784C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2018155C1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |

