Техническое решение относится к области гироскопической техники и может быть использовано для подвеса чувствительного элемента поплавковых интегрирующего гироскопа или датчика угловых скоростей.
Прототипом для него выбран способ гидростатического подвеса чувствительного элемента двухстепенного гироскопа, включающий размещение цилиндрического поплавка в цилиндрической камере, заполнение зазора между поплавком и камерой вязкой жидкостью, обеспечивают при этом плавучесть, близкую к нейтральной. Недостатком прототипа является то, что демпфирующими свойствами подвеса относительно выходной оси управляют посредством выбора вязкости жидкости. Для минимизации динамических погрешностей нужно на сколько это возможно увеличивать вязкость жидкости, /1/, стр.74. Однако сильно вязкие жидкости имеют значительную зависимость от температуры окружающей прибор среды. Для стабилизации демпфирующих свойств в приборах, где не применен обогрев прибора, используют менее вязкие жидкости типа ПФДМЦ-1Г, которые имеют достаточную температурную стабильность. При этом для обеспечения заданных точностных характеристик конструкция прибора должна предусматривать возможность повышения (управления) коэффициента демпфирования при использовании сравнительно маловязкой поддерживающей поплавок жидкости. Поэтому перспективным направлением развития ПИГ и ДУС является разработка конструкции поплавка, обеспечивающего управление коэффициентом демпфирования относительно выходной оси в приборах, где отсутствует обогрев.
Задача - реализация гидростатического подвеса чувствительного элемента двухстепенного гироскопа с управляемой величиной коэффициента демпфирования путем выбора количества радиальных выступов на поверхности поплавка, промежуточного кольцевого подвижного цилиндра и корпуса прибора.
Решение задачи состоит в том, что способ гидростатического подвеса чувствительного элемента двухстепенного гироскопа, включающий размещение цилиндрического поплавка в цилиндрической камере, заполнение зазора между поплавком и камерой вязкой жидкостью, обеспечивают при этом плавучесть, близкую к нейтральной, имеет особенность такую, что формируют режим сдавливания слоев жидкости, разделяющих поверхности поплавка и корпуса прибора путем выполнения выступов на боковой цилиндрической поверхности поплавка, а на корпусе прибора выполняют соответствующие радиальные пазы вдоль цилиндрической образующей, при угловых движениях поплавка отклоняют его в пределах зазора между боковыми поверхностями радиального выступа и паза корпуса прибора, а при использовании гироскопа в качестве датчика угловой скорости дополнительно ограничивают отклонения поплавка β2 в установившемся режиме в пределах /β2/=Но р1/Сβ2, где Но - кинетический момент гироскопа, р1 - входная угловая скорость, Сβ2 - жесткость электрической пружины, которая обеспечивает минимально возможные отклонения поплавка относительно корпуса прибора, в динамическом режиме ограничивают отклонения поплавка относительно корпуса прибора так, чтобы показатель колебательности датчика угловой скорости с аналоговой обратной связью находился в заданных пределах, например, 1.1-1.3, который доводят до заданных пределов посредством электрического демпфирования, используя корректирующий контур аналоговой обратной связи датчика угловой скорости.
Выбирают количество пар радиальных выступов поплавка и пазов корпуса прибора от одного до нескольких в обратно пропорциональной зависимости от величины вязкости применяемой в приборе жидкости. Решение задачи состоит в том, что способ гидростатического подвеса чувствительного элемента двухстепенного гироскопа, включающий размещение цилиндрического поплавка в цилиндрической камере, заполнение зазора между поплавком и камерой вязкой жидкостью, обеспечивают при этом плавучесть, близкую к нейтральной, имеет особенность такую, что формируют режим сдавливания слоев жидкости, разделяющих поверхности поплавка и корпуса прибора путем выполнения выступов на боковой цилиндрической поверхности поплавка, а на корпусе прибора выполняют соответствующие радиальные пазы вдоль цилиндрической образующей, размещают между корпусом прибора и поплавка вдоль цилиндрической образующей подвижный кольцевой цилиндр, закрепляют его на корпусе прибора, выполняют на его внешней и внутренней цилиндрической поверхности радиальные выступы и пазы, размещают радиальные выступы кольцевого цилиндра в пазах корпуса прибора, а в его пазах внутренней поверхности размещают радиальные выступы поплавка, размещают на одном из торцов цилиндра обмотки второго вспомогательного датчика момента, а на корпусе прибора закрепляют систему постоянных его магнитов, при угловых движениях корпуса прибора формируют встречные угловые движения кольцевого цилиндра относительно поплавка в пределах боковых зазоров между боковыми поверхностями пазов кольцевого цилиндра и радиальными выступами поплавка, вращающий момент кольцевого цилиндра формируют так, что пропускают в обмотке второго датчика момента ток противоположной полярности по отношению к току обратной связи первого управляющего датчика момента в датчике угловой скорости, а в интегрирующем гироскопе формируют ток противоположной полярности по отношению к сигналу датчика угла отклонения поплавка относительно корпуса прибора, а при использовании гироскопа в качестве датчика угловой скорости дополнительно ограничивают отклонения поплавка β2 в установившемся режиме в пределах /β2/=Но р1/Сβ2, где Но - кинетический момент гироскопа, р1 - входная угловая скорость, Сβ2 - жесткость электрической пружины, которая обеспечивает минимально возможные отклонения поплавка относительно корпуса прибора, в динамическом режиме ограничивают отклонения поплавка относительно корпуса прибора так, чтобы показатель колебательности датчика угловой скорости с аналоговой обратной связью находился в заданных пределах, например, 1.1-1.3, который доводят до заданных пределов посредством электрического демпфирования, используя корректирующий контур аналоговой обратной связи датчика угловой скорости.
Выбирают количество пар радиальных выступов поплавка и пар выступов кольцевого цилиндра, а также его внутренних пазов и пазов корпуса прибора от одного до нескольких в обратно пропорциональной зависимости от величины вязкости применяемой в приборе жидкости.
Новизна. Решение впервые обобщило опыт разработки не обогревных высокоточных поплавковых интегрирующих гироскопов (ПИГ) и датчиков угловой скорости для без платформенных инерциальных навигационных систем (БИНС). Предложенное решение позволяет управлять коэффициентом демпфирования в ПИГ и ДУС посредством выбора определенного количества радиальных выступов (ребер) на поплавке в обратной пропорциональной зависимости от выбранной сравнительно низкой вязкости поддерживающей поплавок жидкости. Применение промежуточного цилиндра существенно расширяет возможности управления коэффициентом демпфирования из-за режима встречного перемещения его в направлении угловых движений поплавка и выполнения радиальных пазов на внутренней его поверхности и радиальных выступов на внешней его цилиндрической поверхности. Предложенное решение минимизирует отклонения поплавка в установившемся режиме и ограничивают эти отклонения относительно выходной оси в динамическом режиме, а также целый комплекс возмущающих моментов (см. стр. 69-74 /1/).
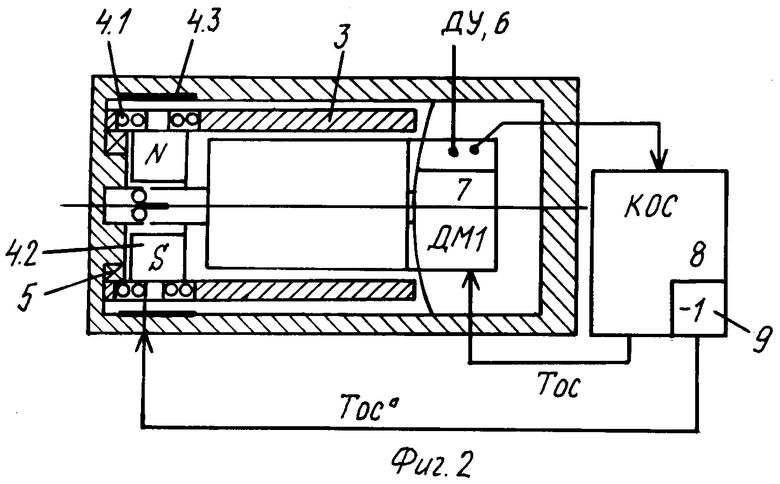
Фиг.1 - поперечный разрез поплавкового двухстепенного ДУС или ПИГ, где 1; 1.1 - корпус и его радиальный паз; 2; 2.1 - корпус поплавка и его радиальный выступ; 3; 3.1; 3.2 - промежуточный кольцевой цилиндр, его внутренний паз и радиальный внешний выступ.
Фиг.2 - функциональная схема двухстепенного поплавкового гироскопа с совмещенным основным датчиком угла и момента (ДУ и ДМ1). В контуре обратной связи КОС 8 символом "-1" помечен инвертор 9 тока обратной связи Ioc, через который попускают сигнал с ДУ ДУС для формирования Ioc* - тока, генерирующего вращающий момент для встречного движения промежуточного цилиндра 3 и поплавка 2. Цифрами 4.1, 4.2, 4.3 помечены элементы второго датчика момента: 4.1 - ротор - обмотка, закрепленная на цилиндре 3; 4.2 - постоянный магнит, закрепленный на корпусе прибора (статор ДМ2). Подвижность цилиндра обеспечивает, например, подшипниковый узел 5; 4.3 - магнитопровод ДМ2.
Обоснование технического решения. Для увеличения (изменения) коэффициента демпфирования в поплавковом гидростатическом подвесе нужно увеличивать вязкость или конструктивно создать условия для возникновения дополнительного сопротивления угловому движению цилиндрического поплавка. Первым и наиболее простым шагом в этом направлении является увеличение поверхности вязкого трения поплавка о жидкость. Для этого нужно увеличить прежде всего боковую поверхность цилиндра-поплавка без изменения его радиуса. Увеличение поверхности вязкого трения может быть получено посредством формирования дополнительных выступов на этой боковой поверхности, чередующихся с углублениями. Т.е. нужно сформировать бороздки на боковой поверхности поплавка. Глубина их может быть незначительна (100-300 мкм). Следующим шагом для увеличения коэффициента демпфирования может стать выполнение пазов и выступов на камере подвеса поплавка, т.е. на корпусе прибора. Далее выступы поплавка размещают в пазах камеры-корпуса прибора. Последующее управление коэффициентом демпфирования возможно посредством выбора количества выступов поплавка и пазов корпуса. Введенный кольцевой элемент - промежуточный цилиндр может существенно изменить коэффициент демпфирования дополнительно еще и потому, что при встречных движениях поверхностей поплавка и камеры будет слой жидкости находиться в режиме сдавливания. Это приведет к более интенсивному движению жидкости в радиальном зазоре. При малых зазорах за счет проявления инерционных свойств жидкости сопротивление поворотам поплавка резко увеличится. Будет увеличиваться и демпфирующий момент относительно выходной оси (см. стр.53 /1/). Результаты теоретического анализа показывают, что кроме классического вязкого трения скольжения поплавка о жидкость относительно камеры его гидростатического подвеса в соотношении для касательного напряжения τ02 (стр.43 /1/) возникает дополнительная составляющая (см. формулу 3.42 /1/), в которой скорость сдавливания и вязкость являются множителями. Иначе говоря, увеличивать касательное напряжение можно дополнительно за счет формирования скорости сдавливания слоя жидкости. Т.е. реализация режима встречного движения поверхностей и сдавливания слоев жидкости при этом. Введением N выступов на поплавке и столько же на корпусе пазов за счет формирования режима сдавливания увеличивает сопротивление угловому движению поплавка относительно корпуса прибора пропорционально количеству радиальных выступов поплавка и пазов корпуса. Отсюда после выбора стабильной жидкости в зависимости от температуры коэффициент демпфирования можно увеличить для обеспечения заданной динамической точности измерения (показателя колебательности М=1.1-1.3 /2/) посредством введения промежуточного цилиндра или количества выступов на поплавке.
Для ДУС модель угловых движений представлена стр. 64 и 65 /1/, из которой следует, что при угловых движениях основания отклонения поплавка в установившемся режиме в гидростатическом подвесе ограничивает жесткость "Механической пружины" или "электрической пружины" Сβ2. Отсюда операция способа: ограничивают отклонения поплавка β2 в пределах /β2/≤Н р/Сβ2. Здесь Н - кинетический момент и р - угловая скорость движения основания. Главным существенным отличительным признаком является операция: в динамическом режиме ограничивают отклонения проплавка посредством обеспечения данного показателя колебательности М=1.1-1.3 (стр.67 /2/). При этом кроме вязкого сопротивления формируют режим сдавливания слоев жидкости, разделяющих поверхности поплавка и цилиндрической камеры (корпуса прибора). В частности, выбором количества "Ребер" на поплавке и промежуточном цилиндре управляют коэффициентом демпфирования угловых движений поплавка. Величина показателя колебательности М, назначенная в пределах 1.1-1.3 по известным из /2/ стр.64 рекомендациям, что соответствует характеристике высокоточного звена автоматики. При этом наибольший вклад в обеспечение рекомендуемой величины М, жестко связанной с перерегулированием, реализуют именно гидростатический подвес "ребристого" поплавка и дополнительного введенного промежуточного цилиндра. Эти мероприятия направлены на исключение системы термостатирования в ДУС и ПИГ. Использование безобогревного ДУС в БИНС оправдано тем, что прибор размещают в отсеке, где работает система жизнеобеспечения. Важным элементом является применение симметрично по отношению к первому датчику момента ДМ1 второго датчика момента ДМ2. Тем самым уменьшают асимметрию торцевых тепловых полей.
"Способ гидростатического подвеса чувствительного элемента двухстепенного гироскопа" реализуется следующим образом.
Решение задачи включает:
- размещение цилиндрического поплавка в цилиндрической камере,
- заполнение зазора между поплавком и камерой вязкой жидкостью, обеспечивают при этом плавучесть, близкую к нейтральной, имеет особенность такую, что
- формируют режим сдавливания слоев жидкости, разделяющих поверхности поплавка и корпуса прибора путем выполнения выступов на боковой цилиндрической поверхности поплавка, а на корпусе прибора выполняют соответствующие радиальные пазы вдоль цилиндрической образующей,
- при угловых движениях поплавка отклоняют его в пределах зазора между боковыми поверхностями радиального выступа и паза корпуса прибора,
- а при использовании гироскопа в качестве датчика угловой скорости дополнительно ограничивают отклонения поплавка β2 в установившемся режиме в пределах /β2/=Но р1/Сβ2, где Но - кинетический момент гироскопа, р1 - входная угловая скорость, Сβ2 - жесткость электрической пружины, которая обеспечивает минимально возможные отклонения поплавка относительно корпуса прибора,
- в динамическом режиме ограничивают отклонения поплавка относительно корпуса прибора так, чтобы показатель колебательности датчика угловой скорости с аналоговой обратной связью находился в заданных пределах, например, 1.1-1.3, который доводят до заданных пределов посредством электрического демпфирования, используя корректирующий контур аналоговой обратной связи датчика угловой скорости.
Выбирают количество пар радиальных выступов поплавка и пазов корпуса прибора от одного до нескольких в обратно пропорциональной зависимости от величины вязкости применяемой в приборе жидкости.
Решение задачи включает размещение цилиндрического поплавка в цилиндрической камере,
- заполнение зазора между поплавком и камерой вязкой жидкостью, обеспечивают при этом плавучесть, близкую к нейтральной, имеет особенность такую, что формируют режим сдавливания слоев жидкости, разделяющих поверхности поплавка и корпуса прибора путем выполнения выступов на боковой цилиндрической поверхности поплавка, а на корпусе прибора выполняют соответствующие радиальные пазы вдоль цилиндрической образующей,
- размещают между корпусом прибора и поплавка вдоль цилиндрической образующей подвижный кольцевой цилиндр,
- закрепляют его на корпусе прибора,
- выполняют на его внешней и внутренней цилиндрической поверхности радиальные выступы и пазы,
- размещают радиальные выступы кольцевого цилиндра в пазах корпуса прибора, а в его пазах внутренней поверхности размещают радиальные выступы поплавка, размещают на одном из торцов цилиндра обмотки второго вспомогательного датчика момента,
- а на корпусе прибора закрепляют систему постоянных его магнитов,
- при угловых движениях корпуса прибора формируют встречные угловые движения кольцевого цилиндра относительно поплавка в пределах боковых зазоров между боковыми поверхностями пазов кольцевого цилиндра и радиальными выступами поплавка,
- вращающий момент кольцевого цилиндра формируют так, что пропускают в обмотке второго датчика момента ток противоположной полярности по отношению к току обратной связи первого управляющего датчика момента в датчике угловой скорости,
- а в интегрирующем гироскопе формируют ток противоположной полярности по отношению к сигналу датчика угла отклонения поплавка относительно корпуса прибора,
- а при использовании гироскопа в качестве датчика угловой скорости дополнительно ограничивают отклонения поплавка β2 в установившемся режиме в пределах /β2/=Но р1/Сβ2, где Но - кинетический момент гироскопа, р1 - входная угловая скорость, Сβ2 - жесткость электрической пружины, которая обеспечивает минимально возможные отклонения поплавка относительно корпуса прибора,
- в динамическом режиме ограничивают отклонения поплавка относительно корпуса прибора так, чтобы показатель колебательности датчика угловой скорости с аналоговой обратной связью находился в заданных пределах, например, 1.1-1.3, который доводят до заданных пределов посредством электрического демпфирования, используя корректирующий контур аналоговой обратной связи датчика угловой скорости.
Выбирают количество пар радиальных выступов поплавка и пар выступов кольцевого цилиндра, а также его внутренних пазов и пазов корпуса прибора от одного до нескольких в обратно пропорциональной зависимости от величины вязкости применяемой в приборе жидкости.
Технический результат. Реализация гидростатического подвеса чувствительного элемента двухстепенного гироскопа с управляемой величиной коэффициента демпфирования путем выбора количества радиальных выступов на поверхности поплавка, промежуточного кольцевого подвижного цилиндра и корпуса прибора.
Технический эффект. В гидростатическом подвесе цилиндрического поплавка необогревного двухстепенного гироскопа применены выступы на поплавке и пазы на корпусе прибора, ограничивающие в динамическом режиме отклонения поплавка относительно корпуса, которые в совокупности с электрической пружиной ограничивают отклонения поплавка в установившемся режиме. Дополнительно для увеличения эффективности процесса сдавливания слоя жидкости при угловых движениях поплавка предложено применение промежуточного подвижного "ребристого" цилиндра.
Список использованных источников
1. Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров. Москва, Машиностроение, 1987 (прототип, стр.5).
2. Горбачев А.Л., Красовский А.Я., Николаев А.В. и др. Проектирование и надежность систем автоматики и телемеханики. Минск, Высшая школа, 1981.
Изобретение предназначено для датчиков угловой скорости и поплавковых интегрирующих гироскопов. Размещают цилиндрический поплавок с радиальными выступами на боковой поверхности в цилиндрической камере корпуса с пазами, соответствующими выступам поплавка, заполняют зазор между ними вязкой жидкостью и обеспечивают при этом нейтральную плавучесть поплавка, при угловых движениях основания ограничивают угловые движения поплавка посредством "электрической пружины", а в динамическом режиме ограничивают отклонения так, что обеспечивают заданный показатель колебательности за счет формирования режима сдавливания слоев жидкости между поверхностями поплавка и камеры корпуса. Усиливают режим сдавливания посредством размещения подвижного промежуточного цилиндра с выступами по внешней и пазами по внутренней его поверхности. Выбором количества пазов на корпусе прибора и выступов на элементах подвеса, в том числе и на промежуточном цилиндре, управляют коэффициентом демпфирования угловых движений поплавка относительно выходной оси датчика угловой скорости. В поплавковом интегрирующем гироскопе реализуют режим сдавливания, как и в датчике угловой скорости, и тем самым управляют коэффициентом демпфирования относительно выходной оси прибора. Техническим результатом является реализация гидростатического подвеса с управляемой величиной коэффициента демпфирования путем выбора радиальных выступов на поплавке, промежуточном цилиндре и корпусе прибора. 2 н. и 2 з.п. ф-лы, 2 ил.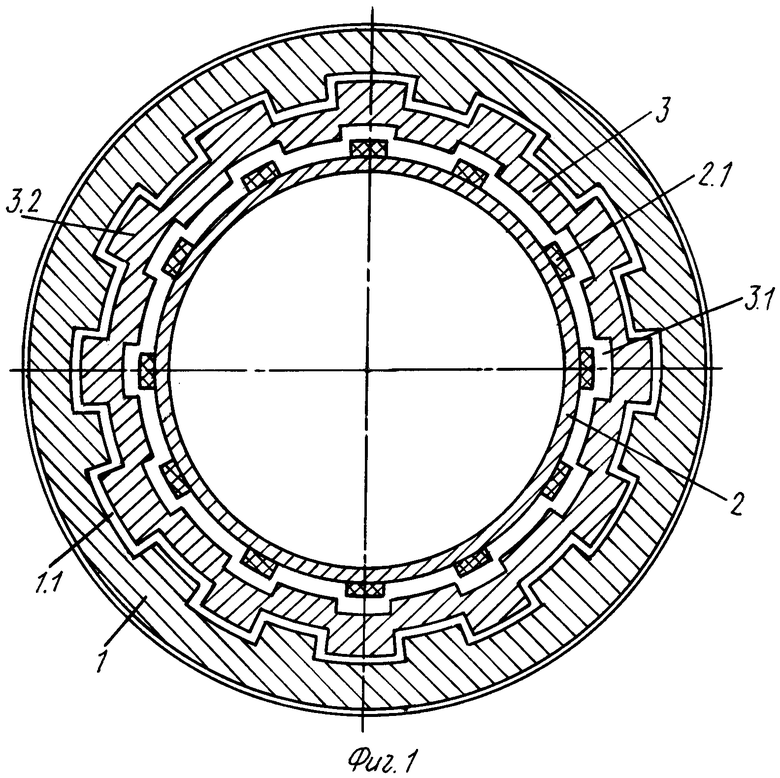
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров, М., Машиностроение, 1987, с.5, 49-74 | |||
| СПОСОБ ПОДГОТОВКИ К РАБОТЕ ГИРОСИСТЕМЫ С ДВУХСТЕПЕННЫМ ПОПЛАВКОВЫМ ГИРОСКОПОМ | 2002 |
|
RU2232378C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2002 |
|
RU2229100C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ПОПЛАВКОВЫХ УЗЛОВ НАВИГАЦИОННЫХ ПРИБОРОВ | 0 |
|
SU250475A1 |
| US 4448086 A, 15.05.1984. | |||

