Изобретение относится к приборостроительной промышленности и может быть использовано в системах автоматического управления летательными аппаратами в условиях знакопеременных задающих воздействий.
В качестве известных решений следует отметить традиционное применение интегрирующих звеньев для достижения астатизма в системах автоматического управления летательными аппаратами (САУ ЛА) [1]. Основу известного устройства составляет наличие интегрирующего звена. В замкнутом контуре регулирования обеспечивается при этом сведение к нулю сигнала на входе интегрирующего звена. Так, при регулировании с интегральным законом по рассогласованию достигается астатизм I-го порядка, установившееся значение регулируемой координаты равно задающему воздействию, рассогласование сводится к нулю.
Известные решения имеют существенный недостаток для систем автоматического регулирования с существенно переменными задающими воздействиями, состоящий в следующем. При изменении сигналов задающего воздействия на этапах перекладки по полярности или при периодических воздействиях на выходе интегрирующего звена и системы в целом создается затягивание процесса по отработке измененного сигнала воздействия, что сужает положительные свойства астатического регулирования, ухудшая характеристики системы автоматического управления по точности и быстродействию.
Наиболее близким техническим решением является устройство интегрирования для астатических систем управления летательными аппаратами, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа [2].
Недостатками известных устройств являются невысокая динамическая точность при отработке сигналов с изменяющейся полярностью.
Технической задачей, решаемой в предлагаемом изобретении, является повышение динамической точности.
Указанный технический результат достигается тем, что известное устройство интегрирования для астатических систем управления летательными аппаратами, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа, дополнительно содержит гистерезисный релейный элемент отрицательной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, а выход - со вторым входом первого блока умножения, и последовательно соединенные гистерезисный релейный элемент положительной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, второй блок умножения, второй вход которого соединен с выходом масштабного усилителя, и второй управляемый ключ, второй вход которого соединен с выходом первого управляемого ключа, а выход - со вторым входом сумматора.
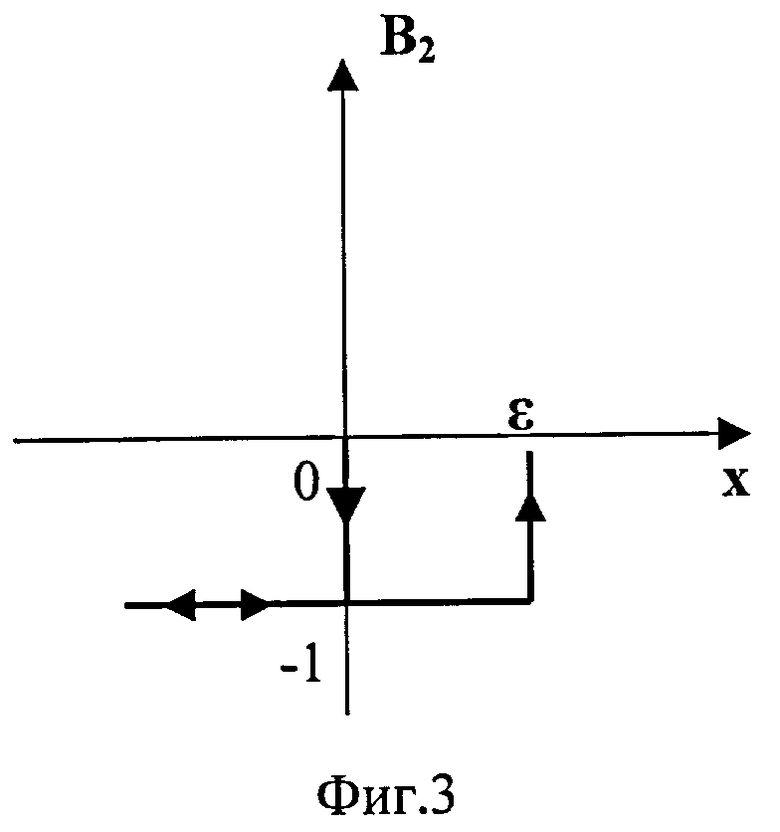
На фиг.1 представлена блок-схема устройства интегрирования для астатических систем управления летательными аппаратами, на фиг.2 и 3 - характеристики блоков 10 и 9 соответственно.
Устройство интегрирования для астатических систем управления летательными аппаратами содержит последовательно соединенные задатчик сигнала интегрирования 1 (ЗСИ), сумматор 2 (С), интегрирующее звено 3 (ИЗ), масштабный усилитель 4 (МУ) и ограничитель сигнала 5 (ОС), выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель 6 (ИУ), вход которого соединен с выходом масштабного усилителя 4, и первый управляемый ключ 7 (1УК), первый блок умножения 8 (1БУ), первый вход которого соединен с выходом масштабного усилителя 4, а выход - со вторым входом первого управляемого ключа 7, гистерезисный релейный элемент отрицательной полярности 9 (ГРЭОП), вход которого соединен с выходом задатчика сигнала интегрирования 1, а выход - со вторым входом первого блока умножения 8, и последовательно соединенные гистерезисный релейный элемент положительной полярности 10 (ГРЭПП), вход которого соединен с выходом задатчика сигнала интегрирования 1, второй блок умножения 11 (2БУ), второй вход которого соединен с выходом масштабного усилителя 4, и второй управляемый ключ 12 (2УК), второй вход которого соединен с выходом первого управляемого ключа 7, а выход - со вторым входом сумматора 2.
Устройство интегрирования для астатических систем управления летательными аппаратами работает следующим образом.
В устройстве сформированы три канала:
- прямой, интегральный канал управления, включающий задатчик сигнала интегрирования 1, сумматор 2, интегрирующее звено 3, масштабный усилитель 4 и ограничитель сигнала 5;
- канал обратной связи, состоящий из инвертирующего усилителя 6 и управляемых ключей 7 и 12. Канал обеспечивает введение обратной связи к прямому каналу для списывания предшествующего интегрированного сигнала при смене полярности входного сигнала;
- управляющий работой устройства канал, включающий в себя два блока умножения 8 и 11, два гистерезисных релейных элемента 10 и 9 по положительной и отрицательной полярности, соответственно. Канал управляет подключением-отключением канала обратной связи при смене полярности входного сигнала посредством нормально замкнутых управляемых ключей 7 и 12.
При включении устройства и нулевом сигнале x на выходе задатчика сигнала интегрирования 1 сигналы: у1 - с выхода интегрирующего звена 3, у2 - с выхода масштабного усилителя 4 и выходной сигнал устройства увых с выхода ограничителя сигнала 5 равны нулю. Пусть задается сигнал x блоком 1, x>0. Блок умножения 11 формирует сигнал:

где B1 - сигнал на выходе гистерезисного релейного элемента положительной полярности 10 в соответствии с фиг.2:

у2 - сигнал на выходе масштабного усилителя 4:

где Кму - коэффициент масштабного усилителя 4, Кму>0;
у1 - сигнал на выходе интегрирующего звена 3:

где Δx - сигнал на выходе сумматора 2:

Сигнал хос формируется каналом обратной связи по сигналу у2 при замкнутых ключах 7 и 12:

где Киу - коэффициент инвертирующего усилителя 6, Киу<0.
При размыкании одного из ключей 7 и 12:
хос=0.
В рассматриваемом случае (х>0) A1>0, разомкнут ключ 12.
Таким образом, обеспечивается работа устройства по прямому интегральному каналу при х>0 и у2>0.
Аналогично и при начальном движении от 0 при х<0 и, соответственно, у2<0.
Действительно, в этом случае разомкнут ключ 7 по сигналу А2>0 от блока 8:

где В2 формируется блоком 9 по фиг.3 в виде

При уменьшении и дальнейшей смене полярности сигнала x - в рассматриваемом случае с положительного на отрицательный - сигнал B1 на выходе блока 10 определяется равным 0 при x<-ε, где ε - зона нечувствительности, ε>0. Второй управляемый ключ 12 замыкает цепь обратной связи к интегральному каналу.
Величина Киу инвертирующего усилителя 6 принимается достаточно большой, чтобы постоянная времени замкнутого контура прямого канала и обратной связи была малой с целью быстрого списывания наинтегрированного значения сигналов у1 и у2 от предыдущего режима с x>0 при смене полярности сигнала х.
Далее сигналы у1 и у2 в функции сигнала x отрицательной полярности также принимают отрицательные значения.
Соответственно сигнал А2=В2·у2 на выходе блока 8 становится больше нуля, А2>0. Первый управляемый ключ 7 размыкает цепь обратной связи: идет процесс чистого интегрирования по прямому каналу отрицательного сигнала х.
При изменении в дальнейшем полярности входного сигнала x с отрицательного на положительный процесс повторяется с учетом зоны нечувствительности ε в блоке 8, т.е. быстро списывается наинтегрированный сигнал предыдущей полярности с переходом на интегрирование сигнала новой полярности. Уровень зоны нечувствительности ε выбирается из условия уменьшения или отсутствия колебательности при смене полярности интегрируемого входного сигнала.
Ограничитель сигнала 5 на выходе устройства обеспечивает требуемое ограничение наинтегрированного сигнала с учетом его масштабирования (у2) с целью обеспечения требуемого уровня выходного сигнала yвых.
Достижение положительного результата видно из аналитического рассмотрения процессов и подтверждено результатами математического моделирования.
Составные звенья могут быть реализованы на современных элементах автоматики и вычислительной техники, например, по [3], а также программно-алгоритмически.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов./ Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.555.
2. Патент РФ №2275675, G06F 7/38, 2004.
3. Ялышев А.У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275675C1 |
| АДАПТИВНОЕ ИНТЕГРАЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2008 |
|
RU2393521C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ЭЛЕКТРОНАГРЕВАТЕЛЯ ПЕЧИ С РЕЖИМАМИ НАГРЕВ - СТАБИЛИЗАЦИЯ ТЕМПЕРАТУРЫ - ОХЛАЖДЕНИЕ | 2009 |
|
RU2422869C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| Устройство программного управления нагревом роторов турбоагрегатов при разгонно-циклических испытаниях | 1987 |
|
SU1502974A2 |

Изобретение относится к приборостроительной промышленности и может быть использовано в системах автоматического управления летательными аппаратами в условиях знакопеременных задающих воздействий. Технический результат - повышение динамической точности. Устройство содержит задатчик сигнала интегрирования (1), сумматор (2), интегрирующее звено (3), масштабный усилитель (4), ограничитель сигнала (5), инвертирующий усилитель (6), первый (7) и второй (12) управляемые ключи, первый и второй блоки умножения (8) и (11), гистерезисные релейные элементы отрицательной (9) и положительной (10) полярности. 3 ил.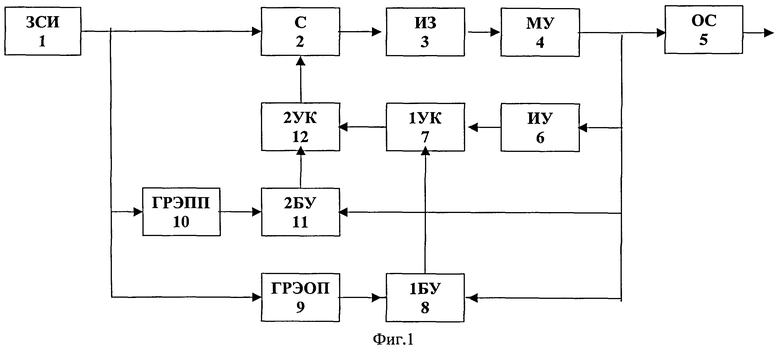
Устройство интегрирования для астатических систем управления летательными аппаратами, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа, отличающееся тем, что оно содержит гистерезисный релейный элемент отрицательной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, а выход - со вторым входом первого блока умножения, и последовательно соединенные гистерезисный релейный элемент положительной полярности, сигнал на выходе которого B1 формируется в соответствии с выражением:

где х - сигнал на входе гистерезисного релейного элемента,
ε - зона нечувствительности гистерезисного релейного элемента, второй блок умножения, второй вход которого соединен с выходом масштабного усилителя, и второй управляемый ключ, второй вход которого соединен с выходом первого управляемого ключа, а выход - со вторым входом сумматора, при этом вход гистерезисного релейного элемента положительной полярности соединен с выходом задатчика сигнала интегрирования, а сигнал на выходе гистерезисного релейного элемента отрицательной полярности В2 формируется в соответствии с выражением:

| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275675C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| Устройство для интегрированиязНАКОпЕРЕМЕННыХ СигНАлОВ | 1978 |
|
SU811280A1 |
| Астатическая система регулирования | 1978 |
|
SU842708A1 |
| US 4679136 A, 07.07.1987. | |||

