Изобретение относится к приборостроительной промышленности и может быть использовано в астатических системах автоматического управления летательными аппаратами в условиях знакопеременных воздействий и широком диапазоне применения по скорости и высоте полета.
В качестве известных решений следует отметить распространенное применение непосредственно процесса интегрирования и интегрирующих звеньев для достижения астатизма в системах автоматического управления летательными аппаратами (САУ ЛА) [1]. Основу известного устройства составляет наличие интегрирующего звена. В замкнутом контуре регулирования обеспечивается при этом сведение к нулю сигнала на входе интегрирующего звена. Так, при регулировании с интегральным законом по рассогласованию достигается астатизм I-го порядка, установившееся значение регулируемой координаты равно задающему воздействию, рассогласование сводится к нулю.
Известные решения имеют существенный недостаток для систем автоматического регулирования с существенно переменными задающими воздействиями, состоящий в следующем. При изменении сигналов задающего воздействия на этапах перекладки по полярности или при периодических воздействиях на выходе интегрирующего звена и системы в целом создается затягивание процесса по астатическому регулированию измененного сигнала воздействия, что сужает положительные свойства астатического регулирования, ухудшая характеристики системы автоматического управления по точности и быстродействию.
Наиболее близким техническим решением является интегральное устройство, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа [2].
Известное устройство осуществляет процесс регулирования на основе раздельного интегрирования по сигналам положительной и отрицательной полярностей.
Недостатком известного решения является невысокая динамическая точность при отработке сигналов с изменяющейся полярностью.
Технической задачей, решаемой в предлагаемом изобретении, является повышение динамической точности при управлении нестационарным летательным аппаратом с отработкой знакопеременных входных воздействий.
Указанный технический результат достигается тем, что известное устройство интегрирования для астатических систем управления летательными аппаратами, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа, дополнительно содержит гистерезисный релейный элемент отрицательной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, а выход - со вторым входом первого блока умножения, последовательно соединенные гистерезисный релейный элемент положительной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, второй блок умножения, второй вход которого соединен с выходом масштабного усилителя, и второй управляемый ключ, второй вход которого соединен с выходом первого управляемого ключа, а выход - со вторым входом сумматора, и последовательно соединенные датчик скоростного напора, функциональный преобразователь, выход которого соединен со вторым входом гистерезисного релейного элемента положительной полярности, и инвертор, выход которого соединен со вторым входом гистерезисного релейного элемента отрицательной полярности, при этом величина сигнала зоны нечувствительности ε, формируемая функциональным преобразователем, обратно пропорциональна сигналу скоростного напора q:
 ,
,
где Кε - коэффициент пропорциональности.
На фиг.1 представлена блок-схема адаптивного интегрирующего устройства для систем управления летательными аппаратами, на фиг.2 и 3 представлены характеристики блоков 10 и 9 соответственно.
Адаптивное интегральное устройство для систем управления летательными аппаратами содержит последовательно соединенные задатчик сигнала интегрирования 1 (ЗСИ), сумматор 2 (С), интегрирующее звено 3 (ИЗ), масштабный усилитель 4 (МУ) и ограничитель сигнала 5 (ОС), выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель 6 (ИУ), вход которого соединен с выходом масштабного усилителя 4, и первый управляемый ключ 7 (1УК), первый блок умножения 8 (1БУ), первый вход которого соединен с выходом масштабного усилителя 4, а выход - со вторым входом первого управляемого ключа 7, гистерезисный релейный элемент отрицательной полярности 9 (ГРЭОП), вход которого соединен с выходом задатчика сигнала интегрирования 1, а выход - со вторым входом первого блока умножения 8, последовательно соединенные гистерезисный релейный элемент положительной полярности 10 (ГРЭПП), вход которого соединен с выходом задатчика сигнала интегрирования 1, второй блок умножения 11 (2БУ), второй вход которого соединен с выходом масштабного усилителя 4, и второй управляемый ключ 12 (2УК), второй вход которого соединен с выходом первого управляемого ключа 7, а выход - со вторым входом сумматора 2, и последовательно соединенные датчик скоростного напора 13 (ДСН), функциональный преобразователь 14 (ФП), выход которого соединен со вторым входом гистерезисного релейного элемента положительной полярности 10, и инвертор 15 (И), выход которого соединен со вторым входом гистерезисного релейного элемента отрицательной полярности 9.
Адаптивное интегральное устройство для систем управления летательными аппаратами работает следующим образом.
В устройстве сформированы четыре канала:
- прямой, интегральный канал управления, включающий задатчик сигнала интегрирования 1, сумматор 2, интегрирующее звено 3, масштабный усилитель 4 и ограничитель сигнала 5;
- канал обратной связи, состоящий из инвертирующего усилителя 6 и управляемых ключей 7 и 12. Канал обеспечивает введение обратной связи к прямому каналу для списывания интегрированного сигнала при смене полярности входного сигнала;
- канал, управляющий работой устройства, включающий в себя два блока умножения 8 и 11, два гистерезисных релейных элемента 10 и 9 по положительной и отрицательной полярности соответственно. Канал управляет подключением-отключением канала обратной связи при смене полярности входного сигнала посредством нормально-замкнутых ключей 7 и 12;
- канал адаптации, состоящий из блоков 13, 14 и 15, осуществляющий адаптивную перестройку зоны нечувствительности ε релейных элементов 9 и 10 в функции скоростного напора q.
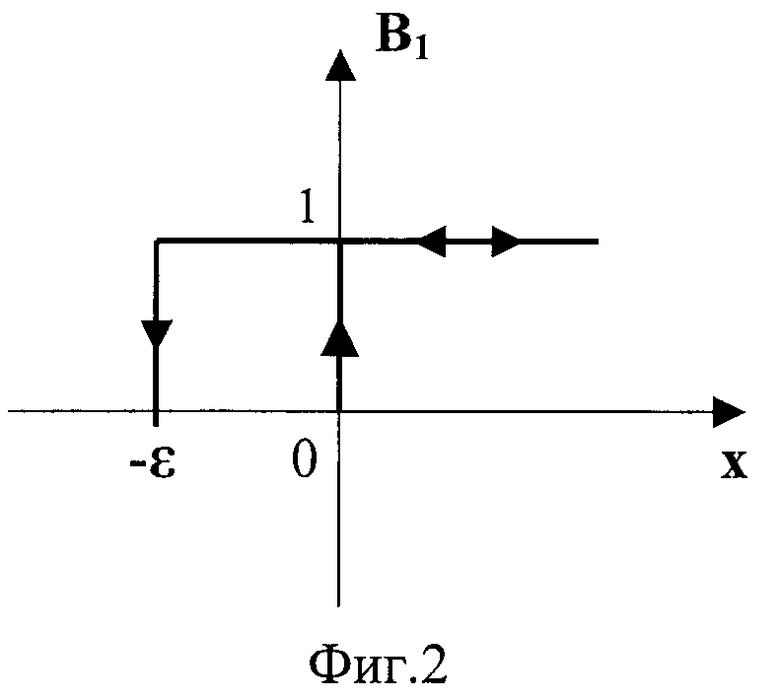
При включении устройства и нулевом сигнале х на выходе задатчика сигнала интегрирования 1 сигналы: y1 - с выхода интегрирующего звена 3, y2 - с выхода масштабного усилителя 4 и выходной сигнал устройства yвых с выхода ограничителя сигнала 5 равны нулю. Пусть задается сигнал х блоком 1, х>0. Управляемые ключи 7 и 12 нормально-замкнуты. Гистерезисный релейный элемент положительной полярности 10 формирует сигнал B1 в соответствии с фиг.2:

Блок умножения 11 формирует сигнал:

где y2 - сигнал на выходе масштабного усилителя 4

где Кму - коэффициент масштабного усилителя 4, Кму>0;
y1 - сигнал на выходе интегрирующего звена 3:

Т.е. при х>0 имеем y1>0 и y2>0.
В уравнении (4) Δх - сигнал на выходе сумматора 2:

Сигнал хос формируется каналом обратной связи по сигналу y2 при замкнутых ключах 7 и 12:

где Киу - коэффициент инвертирующего усилителя 6, Киу<0.
При размыкании одного из ключей 7, 12 xoc=0.
В рассматриваемом случае (х>0) A1=0, разомкнут ключ 12.
Таким образом, обеспечивается работа устройства по прямому интегральному каналу при х>0 и y2>0.
Аналогично и при начальном движении от 0 при х<0, определяющем и y2<0.
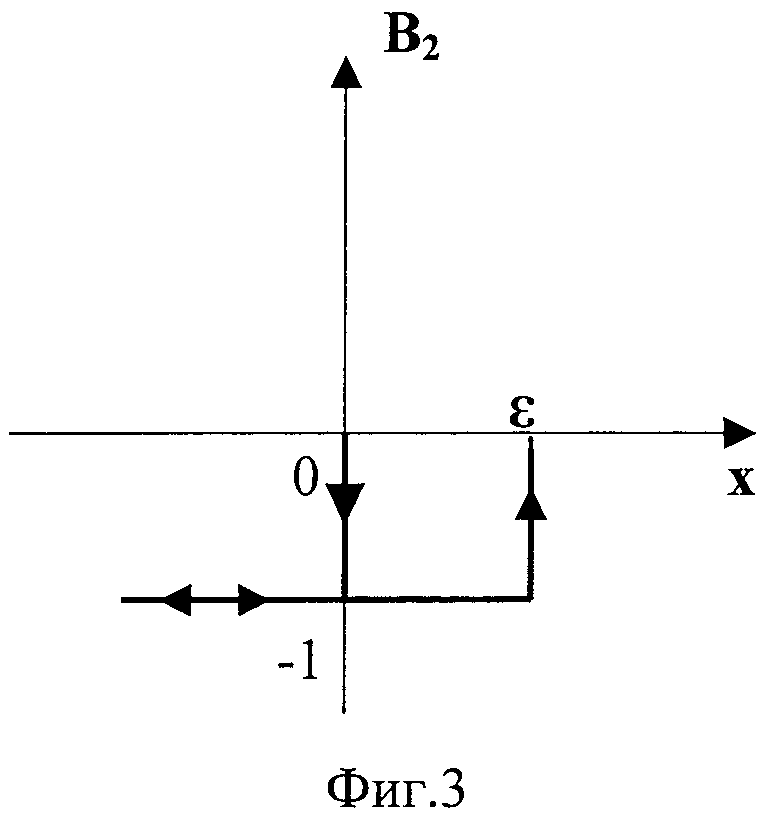
Действительно, в этом случае разомкнут ключ 7 по сигналу А2>0 от блока 8:

где В2 - сигнал с выхода гистерезисного элемента отрицательной полярности 9, формируемый в соответствии с фиг.3:

При смене полярности сигнала х с положительного на отрицательный - сигнал B1 на выходе блока 10 определяется равным 0 при х<-ε, где ε - зона нечувствительности, ε>0, управляемый ключ 12 замыкает цепь обратной связи, подключая ее к интегральному каналу.
Величина Киу инвертирующего усилителя 6 принимается достаточно большой, чтобы постоянная времени замкнутого контура прямого канала и обратной связи была малой с целью быстрого списывания наинтегрированного значения сигнала y1 и, соответственно, y2 предыдущего режима при x>0.
Далее сигналы y1 и y2 в функции сигнала X отрицательной полярности также принимают отрицательные значения.
Соответственно произведение В2·y2 и сигнал А2 на выходе блока 8 становится больше нуля. Управляемый ключ 7 размыкает цепь обратной связи. Идет процесс чистого интегрирования по отрицательному сигналу х.
При изменении в дальнейшем полярности входного сигнала x с отрицательной на положительную процесс повторяется с учетом положительной зоны нечувствительности ε в блоке 9, т.е. быстро списывается наинтегрированный сигнал предыдущей полярности с переходом на интегрирование сигнала новой полярности.
Уровень зоны нечувствительности ε выбирается из условия отсутствия колебательности при смене полярности интегрируемого входного сигнала.
Ограничитель сигнала 5 на выходе устройства обеспечивает требуемое ограничение наинтегрированного сигнала с учетом его масштабирования (y2) с целью обеспечения требуемого уровня выходного сигнала yвых.
В реальных условиях полета летательного аппарата изменяются его динамические характеристики и свойства, так как изменяются высота и скорость полета, т.е. параметры летательного аппарата являются существенно нестационарными. При этом требования к качеству работы устройства должны быть инвариантными к этим условиям. Важным параметром предложенного устройства является величина зоны нечувствительности ε релейных элементов 9 и 10 (корректный выбор которой обеспечивает качество интегрирования). Обобщенным фактором изменения условий полета может служить скоростной напор q. Их взаимосвязь соответствует соотношению ε·q=const=Кε. Таким образом определяется функциональная зависимость ε от q. В рассматриваемом устройстве эта зависимость определена в функциональном преобразователе 14, как обратно пропорциональная:

где Кε - коэффициент пропорциональности.
Достижение положительного результата подтверждено результатами математического моделирования.
Составные звенья устройства могут быть реализованы на современных элементах автоматики и вычислительной техники, например, по [3], а также программно-алгоритмически.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов./Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.555.
2. Патент РФ № 2275675, G06F 7/38, 2004.
3. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИНТЕГРИРОВАНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2008 |
|
RU2394261C1 |
| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275675C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ЭЛЕКТРОНАГРЕВАТЕЛЯ ПЕЧИ С РЕЖИМАМИ НАГРЕВ - СТАБИЛИЗАЦИЯ ТЕМПЕРАТУРЫ - ОХЛАЖДЕНИЕ | 2009 |
|
RU2422869C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| Двухканальный интегратор для систем автоматического управления | 1990 |
|
SU1791827A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ШИРОКОМ СПЕКТРЕ ВОЗМУЩАЮЩИХ ВОЗДЕЙСТВИЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589236C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532719C1 |
Изобретение относится к приборостроительной промышленности и может быть использовано в астатических системах автоматического управления летательными аппаратами в условиях знакопеременных воздействий и широком диапазоне применения по скорости и высоте полета. Технический результат - повышение динамической точности при управлении нестационарным летательным аппаратом с отработкой знакопеременных входных воздействий. Устройство содержит задатчик сигнала интегрирования (1), сумматор (2), интегрирующее звено (3), масштабный усилитель (4), ограничитель сигнала (5), инвертирующий усилитель(6), первый (7) и второй (12) управляемые ключи, первый (8) и второй (11) блоки умножения, гистерезисные релейные элементы отрицательной (9) и положительной (10) полярности, датчик скоростного напора (13), функциональный преобразователь (14) и инвертор (15). 3 ил.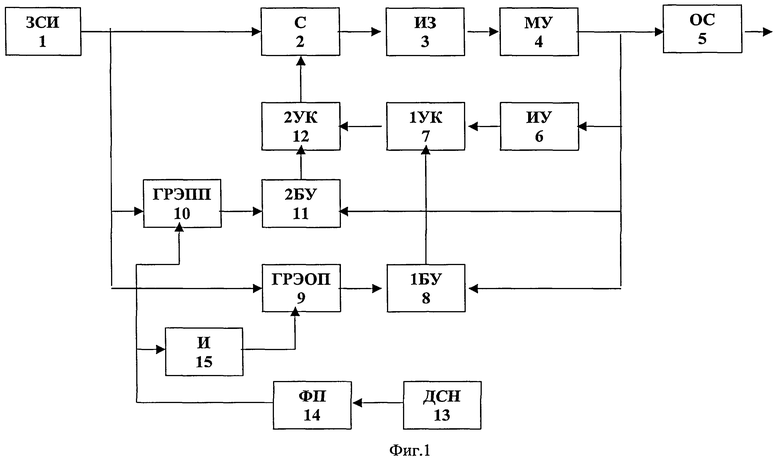
Адаптивное интегральное устройство для систем управления летательными аппаратами, содержащее последовательно соединенные задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель и ограничитель сигнала, выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель, вход которого соединен с выходом масштабного усилителя, и первый управляемый ключ, первый блок умножения, первый вход которого соединен с выходом масштабного усилителя, а выход - со вторым входом первого управляемого ключа, отличающееся тем, что оно содержит гистерезисный релейный элемент отрицательной полярности, вход которого соединен с выходом задатчика сигнала интегрирования, а выход - со вторым входом первого блока умножения, последовательно соединенные гистерезисный релейный элемент положительной полярности, сигнал на выходе B1 которого формируется в соответствии с выражением
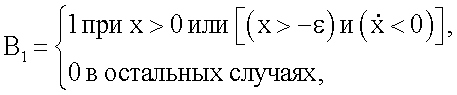
где х - сигнал на входе гистерезисного релейного элемента;
ε - зона нечувствительности гистерезисного релейного элемента,
второй блок умножения, второй вход которого соединен с выходом масштабного усилителя, и второй управляемый ключ, второй вход которого соединен с выходом первого управляемого ключа, а выход - со вторым входом сумматора, последовательно соединенные датчик скоростного напора, функциональный преобразователь для формирования величины зоны нечувствительности упомянутых релейных элементов и инвертор, выход которого соединен со вторым входом гистерезисного релейного элемента отрицательной полярности, сигнал на выходе В2 которого формируется в соответствии с выражением
при этом первый и второй входы гистерезисного элемента положительной полярности соединены соответственно с выходом задатчика сигнала интегрирования и выходом функционального преобразователя, а величина сигнала зоны нечувствительности ε, формируемая функциональным преобразователем, обратно пропорциональна сигналу скоростного напора q

где Кε - коэффициент пропорциональности.
| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275675C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| Устройство для интегрированиязНАКОпЕРЕМЕННыХ СигНАлОВ | 1978 |
|
SU811280A1 |
| Астатическая система регулирования | 1978 |
|
SU842708A1 |
| US 4679136 А, 07.07.1987. | |||

