Изобретение относится к кабельной промышленности и может быть применено на современных высокоавтоматизированных кабельных линиях в качестве регулируемого электропривода для обеспечения всех технологических скоростных режимов.
Наиболее близким по технической сущности и достигнутому результату является многодвигательный привод конвейерных систем по А.С. №2081035/29-03, МПК В 65 G 23/00, содержащий отдельный базовый и зависимые приводы, снабженный датчиком активного тока базового привода и регуляторами, редукторами и машинами постоянного тока, у которых обмотки постоянного тока соединены последовательно и подключены к общему источнику постоянного тока регулируемого напряжения.
Недостатками прототипа являются плохие регулировочные свойства и недостаточная по технологическим условиям точность поддержания натяжения конвейерной ленты.
Техническим результатом изобретения является устранение указанных недостатков, а именно создание электропривода с улучшенными регулировочными свойствами, обеспечивающего повышение точности поддержания натяжения кабеля (ленты), а также надежности работы в переходных режимах функционирования агрегата.
Технический результат достигается тем, что многодвигательный привод обрабатываемой кабельной линии, содержащий в каждой секции электродвигатели с тормозами, соединенные через дифференциальные редукторы с исполнительными механизмами, согласно изобретению, снабжен микропроцессорным устройством, выполненным с возможностью задания частот вращения электродвигателей секций и натяжения кабеля, датчиками частоты вращения, датчиками натяжения кабельной линии, сумматорами первой и второй линий, нелинейными блоками и преобразователями напряжения питания, при этом каждый электродвигатель соединен с соответствующим датчиком частоты вращения и выходом соответствующего преобразователя напряжения питания, вход которого соединен с выходом соответствующего сумматора первой линии, выходы микропроцессорного устройства подключены к задающим входам всех сумматоров, выходы датчиков частоты вращения - к сигнальным входам соответствующих сумматоров первой линии, выходы датчиков натяжения кабельной линии - к сигнальным входам соответствующих сумматоров второй линии, выходы которых соединены со входами соответствующих нелинейных блоков, выходы нелинейных блоков подключены ко входам обратной связи по натяжению сумматоров первой линии соседних секций.
Новая совокупность указанных существенных признаков необходима и достаточна для достижения указанного технического результата, так как введение микропроцессорного устройства, сумматоров, нелинейных блоков и соответствующее их подключение обеспечивают повышение точности натяжения обрабатываемого кабеля, что в конечном итоге позволяет повысить надежность работы агрегатов и качество производимой продукции.
Сущность изобретения поясняется чертежами, на фигуре 1 изображена функциональная схема многодвигательного привода кабельной линии, содержащая три секции, а на фигуре 2 показан вид зависимости, которую реализует нелинейный блок.
Устройство содержит электродвигатели 1 секций, подключенные к преобразователям 2. Каждый электродвигатель снабжен датчиком 3 частоты вращения, выход которого соединен с входами первого сумматора 4, выход которого подключен к управляющему входу преобразователя 2.
Входные валы редукторов 5 соединены с электродвигателями 1 секций, а выходные валы соединены с валами исполнительных механизмов 6. Многодвигательный привод также содержит микропроцессорное устройство 7, входы которого подключены к входам всех сумматоров 4, 8, выходы датчиков натяжения 9 подключены к первым входам вторых сумматоров 8, выходы которых подключены к входам нелинейных блоков 10.
Выходы нелинейных блоков 10 подключены к входам сумматоров 4 первой линии соседних секций. На валах роторов электродвигателей 1 секций имеются тормозы 11.
Устройство работает следующим образом.
Сигнал с датчиков 3 частоты вращения попадает на сумматоры 4 первой линии, туда же от микропроцессорного устройства 7 поступают сигналы, пропорциональные заданным частотам вращения электродвигателей секций. С сумматоров 4 первой линии сигналы рассогласования поступают на управляющие входы преобразователей 2, которые изменяют напряжение питания, подаваемое на электродвигатели секций.
Сигнал, пропорциональный заданному натяжению кабеля, поступает от микропроцессорного устройства 7 на сумматоры 8 второй линии, туда же приходит сигнал с датчиков натяжения 9. Сигнал с датчиков натяжения 9 сравнивается с сигналами, пропорциональными заданному натяжению, и сигналы рассогласования поступают на нелинейные блоки 10. Вид зависимости, которую реализуют нелинейные блоки, представлен на фигуре 2. Чем больше уровень сигнала рассогласования на входе, тем круче наклон кривой и, следовательно, интенсивней действие обратной связи по натяжению. Сформировавшиеся сигналы нелинейных блоков 10 со знаками плюс или минус поступают на сумматоры 4 первой линии как рассматриваемой, так и последующей секции. В результате происходит изменение частоты вращения секционных электродвигателей 1, т.е. их разгон или торможение, влияющее на натяжение кабеля.
Таким образом, благодаря такому решению обеспечивается повышение точности натяжения обрабатываемого кабеля, что в конечном итоге позволяет повысить надежность работы агрегатов и качество производимой продукции. Изобретение может быть использовано в многодвигательных взаимосвязанных электроприводах постоянного или переменного тока линий по производству кабельной продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| Многодвигательный электропривод постоянного тока для поточной линии с перематывающим механизмом | 1983 |
|
SU1160520A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Многодвигательный электропривод непрерывно-поточного агрегата | 1983 |
|
SU1171949A1 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Многодвигательный электропривод бумагоделательной машины | 1989 |
|
SU1698332A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
Изобретение относится к кабельной промышленности и может быть применено на современных высокоавтоматизированных кабельных линиях в качестве регулируемого электропривода для обеспечения всех технологических скоростных режимов. Устройство содержит в каждой секции электродвигатели с тормозами, соединенные через дифференциальные редукторы с исполнительными механизмами. Привод снабжен микропроцессорным устройством, выполненным с возможностью задания частот вращения электродвигателей секций и натяжения кабеля. Введены также датчики частоты вращения, датчики натяжения кабельной линии, сумматоры первой и второй линий, нелинейные блоки и преобразователи напряжения питания. Каждый электродвигатель соединен с соответствующим датчиком частоты вращения и выходом соответствующего преобразователя напряжения питания, вход которого соединен с выходом соответствующего сумматора первой линии. Выходы микропроцессорного устройства подключены к задающим входам всех сумматоров, выходы датчиков частоты вращения - к сигнальным входам соответствующих сумматоров первой линии, выходы датчиков натяжения кабельной линии - к сигнальным входам соответствующих сумматоров второй линии. Выходы последних соединены со входами соответствующих нелинейных блоков. Выходы нелинейных блоков подключены ко входам обратной связи по натяжению сумматоров первой линии соседних секций. Изобретение позволяет создать электропривод с улучшенными регулировочными свойствами, а также повышенными точностью поддержания натяжения кабеля и надежностью работы в переходных режимах функционирования агрегата. 2 ил.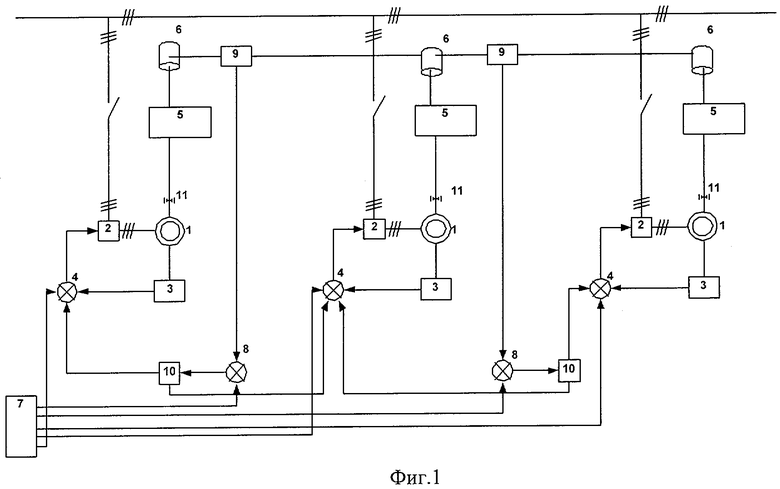
Многодвигательный привод обрабатываемой кабельной линии, содержащий в каждой секции электродвигатели с тормозами, соединенные через дифференциальные редукторы с исполнительными механизмами, отличающийся тем, что привод снабжен микропроцессорным устройством, выполненным с возможностью задания частот вращения электродвигателей секций и натяжения кабеля, датчиками частоты вращения, датчиками натяжения кабельной линии, сумматорами первой и второй линий, нелинейными блоками и преобразователями напряжения питания, при этом каждый электродвигатель соединен с соответствующим датчиком частоты вращения и выходом соответствующего преобразователя напряжения питания, вход которого соединен с выходом соответствующего сумматора первой линии, выходы микропроцессорного устройства подключены к задающим входам всех сумматоров, выходы датчиков частоты вращения - к сигнальным входам соответствующих сумматоров первой линии, выходы датчиков натяжения кабельной линии - к сигнальным входам соответствующих сумматоров второй линии, выходы которых соединены со входами соответствующих нелинейных блоков, выходы нелинейных блоков подключены ко входам обратной связи по натяжению сумматоров первой линии соседних секций.
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Многодвигательный привод конвейерных систем | 1974 |
|
SU656930A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1997 |
|
RU2136570C1 |
| Устройство управления многоприводной подъемно-транспортной установкой с гибким тяговым органом | 1986 |
|
SU1425141A1 |

