Изобретение относится к способам управления асинхронными двигателями, в том числе тяговыми.
Известен способ управления асинхронным двигателем, при котором измеряют частоту вращения ротора асинхронного двигателя, определяют и вводят в регулятор напряжения разность между заданной и текущей частотами вращения ротора асинхронного двигателя и изменяют напряжение на двигателе в соответствии с заданным значением на выходе регулятора напряжения (см. см. книгу В.А.Винокурова, Д.А.Попова. Электрические машины железнодорожного транспорта. Учебник для вузов. - М.: Транспорт, 1986. - 511 С., с.374).
Недостатком этого способа является снижение перегрузочной способности двигателя, т.к. максимальный момент двигателя прямо пропорционален квадрату напряжения на двигателе. Поэтому в зоне низких скоростей асинхронный двигатель не может реализовать даже номинальные значения момента, что не позволяет использовать этот способ управления тяговыми двигателями особенно, т.к. при пуске, в зоне околостоповых скоростей, необходима реализация момента, значительно превышающего номинальный. Кроме того, двигатель работает не с номинальным скольжением, что предопределяет его низкий к.п.д. и коэффициент мощности.
Известен способ управления асинхронным двигателем, принятый за прототип, заключающийся в том, что измеряют частоту вращения асинхронного двигателя, вводят в регулятор напряжения разность между заданной и текущей частотами вращения асинхронного двигателя, измеряют ток асинхронного двигателя, по значению тока определяют величину оптимального скольжения асинхронного двигателя, определяют частоту напряжения асинхронного двигателя суммированием частоты вращения ротора асинхронного двигателя и оптимального скольжения, изменяют частоту и напряжение асинхронного двигателя в соответствии с определенными их значениями (см. книгу В.А.Винокурова, Д.А.Попова. Электрические машины железнодорожного транспорта. Учебник для вузов. - М.: Транспорт, 1986. - 511 С.)
Этот способ имеет следующий недостаток. Определение оптимального скольжения при реализации данного способа осуществляется посредством функционального преобразователя ФП (см. рис.10.55 на с.392 указанной книги) по току статора I1. Однако использование зависимостей, заложенных в функциональный преобразователь ФП (см. рис.10.52 на с.385 указанной книги), предполагает наличие известного значения электромагнитного момента асинхронного двигателя, которое при реализации данного способа не только не определяется, но даже не вводится в ФП.
Кроме того, использование зависимостей и уравнений, характеризующих работу асинхронного двигателя, приведенных в этой книге, подразумевает известными значения параметров rm, хm, r'2, х'2, которые не приводятся в паспортных данных двигателя и не определяются при типовых испытаниях тяговых двигателей. Поскольку параметры тяговых двигателей допускают 5% разброс, то для определения значений rm, хm, r'2, х'2 необходимо проведение непредусмотренных протоколом соответствующих испытаний для каждого двигателя каждого электровоза, что затруднительно.
Задачей изобретения является обеспечение работы асинхронного двигателя во всем диапазоне частот вращения ротора с номинальными характеристиками, т.е. в оптимальном режиме, при практически неизменных коэффициенте мощности, коэффициенте перегружаемости и абсолютном скольжении, используя лишь номинальные паспортные значения параметров тягового асинхронного двигателя и значение частоты вращения его ротора.
Поставленная задача решается способом управления асинхронным двигателем, при котором измеряют частоту вращения ротора асинхронного двигателя f2, вводят в регулятор напряжения разность между заданной и текущей частотами вращения асинхронного двигателя, определяют величину напряжения асинхронного двигателя по формуле
 ,
,
где UH - номинальное значение напряжения асинхронного двигателя;
МЗ - сигнал с выхода регулятора напряжения, соответствующий заданному электромагнитному моменту асинхронного двигателя;
МН - номинальный электромагнитный момент асинхронного двигателя;
f1Н - номинальная синхронная частота вращения асинхронного двигателя;
f1Н - номинальная частота вращения асинхронного двигателя,
определяют оптимальное скольжение ротора асинхронного двигателя по формуле
 ,
,
определяют частоту напряжения асинхронного двигателя суммированием оптимального скольжения и частоты вращения ротора и изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с определенными значениями.
При работе асинхронного двигателя в номинальном (оптимальном) режиме его номинальное (оптимальное) абсолютное скольжение определится
fSH=f1Н-f2Н.
При управлении асинхронным двигателем по закону М.П.Костенко (см. книгу Л.М.Пиотровского. Электрические машины. - М.-Л.: Госэнергоиздат, 1949. - С.528 на С.408)
механические характеристики двигателя (в части их устойчивой работы) параллельны, т.е. абсолютное скольжение одно и тоже. Тогда, при изменении момента нагрузки М (см. фиг.1), оптимальное скольжение определится
 .
.
Для того чтобы асинхронный двигатель работал в оптимальном режиме с заданной скоростью и обеспечивал заданный момент, необходимо иметь синхронную частоту
f=f2+fОПТ,
а напряжение
 .
.
Подставляя вместо М заданное значение момента (момент может задаваться директивно, например, с контроллера машиниста локомотива, или, например, регулятором напряжения или скорости), имеем значение напряжения асинхронного двигателя
 .
.
Новым в предлагаемом изобретении, в отличие от прототипа, является обеспечение работы асинхронного двигателя, в соответствии с поставленной задачей, во всем диапазоне частот вращения ротора с номинальными характеристиками при практически неизменных коэффициенте мощности, коэффициенте перегружаемости и абсолютном скольжении, используя лишь номинальные паспортные значения параметров тягового асинхронного двигателя и значение частоты вращения его ротора.
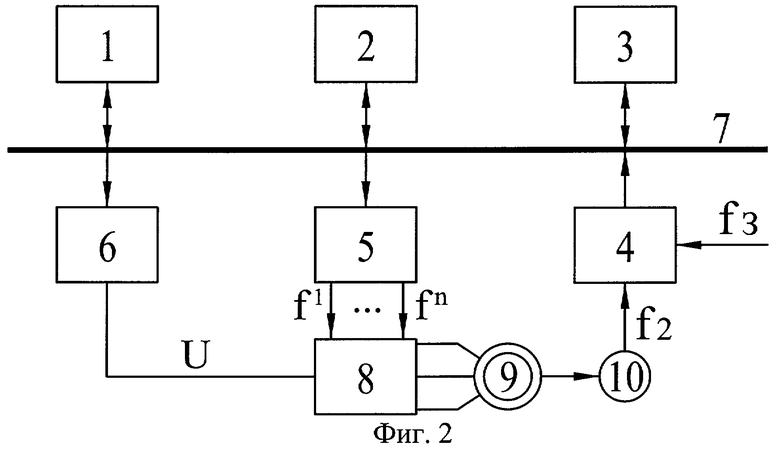
На фиг.1 представлены механические характеристики асинхронного двигателя, поясняющие способ управления; на фиг.2 - устройство, осуществляющее способ; на фиг.3 - алгоритм работы устройства.
Способ реализуется микропроцессорной системой, состоящей из процессора 1, оперативного запоминающего устройства (ОЗУ) 2, постоянного запоминающего устройства (ПЗУ) 3, аналого-цифрового преобразователя (АЦП) 4, блока драйверов 5, цифроаналогового преобразователя (ЦАП) 6. Входы-выхода процессора 1, ОЗУ 2, ПЗУ 3, выход АЦП 4, входы блока драйверов 5 и ЦАП 6 объединены шиной адресов-данных 7. Выходы блока драйверов 5 соединены с управляющими цепями транзисторов инвертора 8, а выход ЦАП 6 - с управляющим входом источника регулируемого постоянного напряжения инвертора.
Процессор, ОЗУ, ПЗУ, АЦП, ЦАП могут быть интегрированы в специализированный контроллер, например M1 67-1С (см. каталог продукции "Бортовая промышленная электроника" АО "Каскод", 105037, Москва, Измайловская пл., 7).
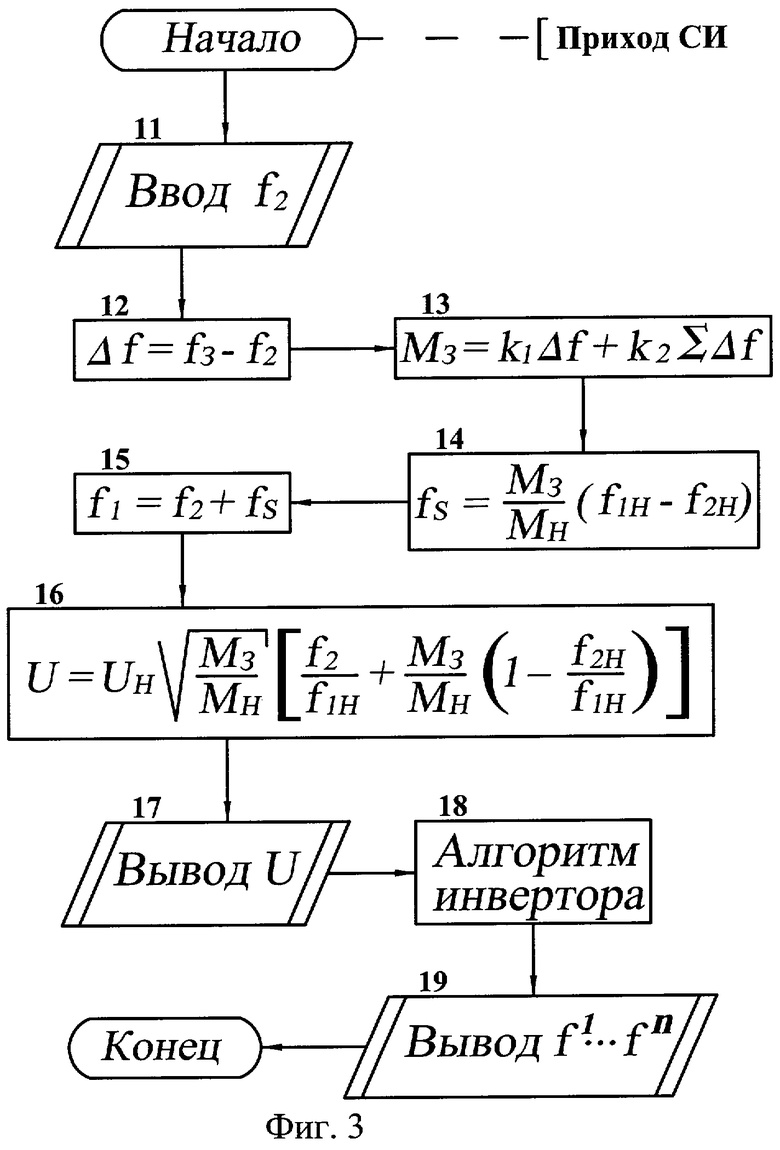
Способ реализуется в соответствии с алгоритмом на фиг.3.
Алгоритм выполняется по приходу синхронизирующего сигнала, соответствующему вводу измеряемого сигнала с датчика 10 частоты вращения (блок 11, фиг.3). В блоке 12 определяют разность между заданной f3 и текущей f2 частотами вращения ротора асинхронного двигателя и вводят в регулятор, например, ПИ-регулятор (блок 13). В блоке 14 определяют величину оптимального скольжения
 ,
,
где MЗ - сигнал с выхода регулятора напряжения, соответствующий заданному электромагнитному моменту асинхронного двигателя;
МН - номинальный электромагнитный момент асинхронного двигателя;
f1Н - номинальная синхронная частота вращения асинхронного двигателя;
f2Н - номинальная частота вращения асинхронного двигателя,
после чего суммируют ее с частотой вращения ротора (блок 15), получая частоту вращения f1 магнитного поля асинхронного двигателя. Затем в блоке 16 преобразуют сигнал с выхода регулятора напряжения MЗ в заданную величину напряжения асинхронного двигателя в соответствии с формулой
 ,
,
в блоке 17 выводят необходимое значение величины напряжения инвертора на управляющий вход источника регулируемого постоянного напряжения, а в блоке 18 выполняют алгоритм переключения транзисторов инверторов в соответствии с частотой f1 и в процессе выполнения (блок 19) запускают драйверы блока драйверов, нагруженных на управляющие цепи транзисторов инвертора 8.
При очередном вводе сигнала с датчика частоты вращения ротора асинхронного двигателя алгоритм повторяется.
Предлагаемый способ управления асинхронным двигателем позволяет регулировать скорость в более широком диапазоне скоростей с коэффициентом мощности и перегрузочной способностью близкими к номинальным значениям. Для реализации способа достаточно иметь датчик частоты вращения ротора двигателя, остальные значения для определения необходимых частоты и величины напряжения статора асинхронного двигателя берутся из паспорта двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2005 |
|
RU2314634C2 |
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2398349C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1995 |
|
RU2123757C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2007 |
|
RU2339154C1 |
Изобретение относится к области электротехники и может быть использовано для управления асинхронными двигателями, в том числе тяговыми. Техническим результатом является обеспечение оптимального режима во всем диапазоне частоты вращения ротора при практически постоянных коэффициенте мощности, коэффициенте перегружаемости и абсолютном скольжении. В способе управления асинхронным двигателем частоту напряжения асинхронного двигателя определяют как сумму частоты вращения ротора и его оптимального скольжения. Оптимальное скольжение и величину заданного значения напряжения U определяют в зависимости от сигнала МЗ с выхода регулятора напряжения, соответствующего заданному электромагнитному моменту асинхронного двигателя, номинального электромагнитного момента МН асинхронного двигателя, номинальной синхронной частоты f1H вращения асинхронного двигателя, номинальной частоты f2Н вращения асинхронного двигателя и номинального значения напряжения UН асинхронного двигателя по определенным формулам. 3 ил.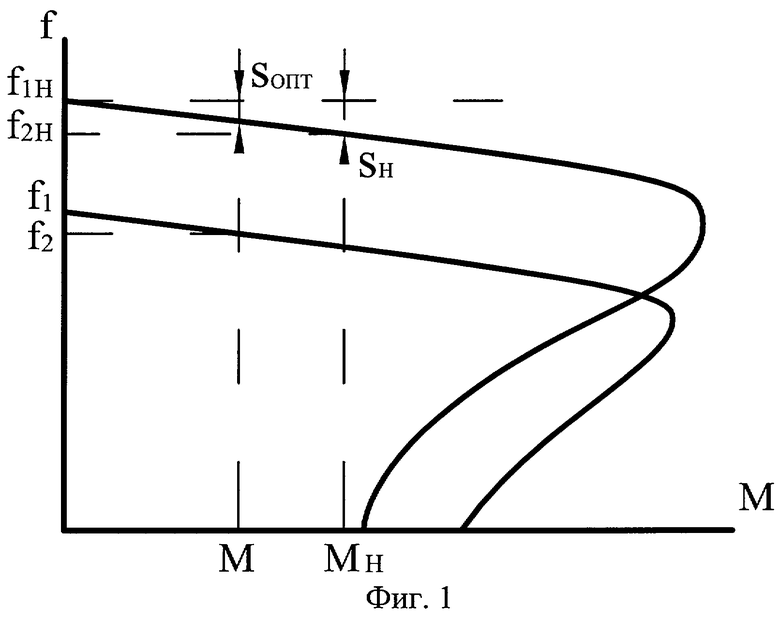
Способ управления асинхронным двигателем, заключающийся в том, что измеряют частоту вращения асинхронного двигателя f2, вводят в регулятор напряжения разность между заданной и текущей частотами вращения асинхронного двигателя, определяют частоту напряжения асинхронного двигателя суммированием частоты вращения ротора асинхронного двигателя и его оптимального скольжения, изменяют частоту и величину напряжения на асинхронном двигателе в соответствии с требуемыми значениями, отличающийся тем, что оптимальное скольжение определяют по формуле
где МЗ - сигнал с выхода регулятора напряжения, соответствующий заданному электромагнитному моменту асинхронного двигателя;
МН - номинальный электромагнитный момент асинхронного двигателя;
f1Н - номинальная синхронная частота вращения асинхронного двигателя;
f2Н - номинальная частота вращения асинхронного двигателя,
а величину напряжения асинхронного двигателя - по формуле
где U - заданное значение напряжения асинхронного двигателя;
UH - номинальное значение напряжения асинхронного двигателя.
| ВИНОКУРОВ В.А., ПОПОВ Д.А., Электрические машины железнодорожного транспорта | |||
| Учебник для вузов | |||
| Москва, Транспорт, 1986, с.511 | |||
| ТЕПЛОМАССООБМЕННЫЙ АППАРАТ | 1997 |
|
RU2123375C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1993 |
|
RU2067351C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2000 |
|
RU2199815C2 |
| Устройство для управления бесконтактным асинхронным двигателем | 1976 |
|
SU609199A1 |
| Способ частотного управления асинхронным двигателем | 1990 |
|
SU1830178A3 |
| ДЕЗИНФИЦИРУЮЩАЯ КОМПОЗИЦИЯ, ИСПОЛЬЗУЕМАЯ ДЛЯ ДЕЗИНФИЦИРОВАНИЯ МЕДИЦИНСКОГО ОБОРУДОВАНИЯ, ИМЕЮЩЕГО МЕТАЛЛИЧЕСКИЕ ЧАСТИ | 1992 |
|
RU2122434C1 |
| US 4227137 А, 07.10.1980 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "РЫБНЫЕ БИТОЧКИ С КАПУСТОЙ В СОУСЕ СМЕТАННОМ С ЛУКОМ" | 2015 |
|
RU2576163C1 |
| DE 1563228 А, 19.03.1970 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ТВЕРДЫХ СПЛАВОВ | 1930 |
|
SU22267A1 |
| WO 9853551 А1, 26.11.1998. | |||

