Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, предназначенных преимущественно для работы в гибком переналаживаемом производстве при повышенных требованиях к точности установ-ки цилиндрических деталей различного диаметра в условиях безлюдной технологии.
Цeл)Ю изобретения является упрошение конструкции схвата и повышение при этом точности позиционирования за счет сохранения неизменным положения оси центрирования цилиндрических деталей различного диаметра при применении шарнирно-рычаж- ного четырехзвенного механизма.
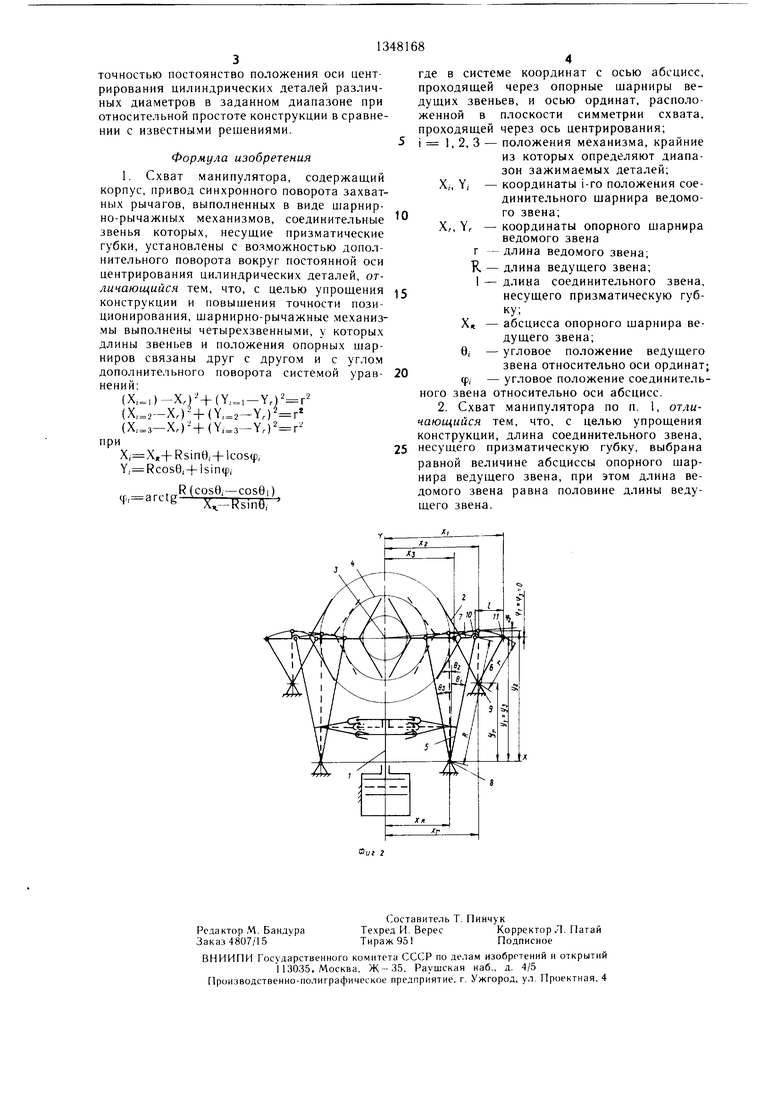
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - его кинематическая схема.
Схват манипулятора состоит из расположенного в корпусе привода 1 синхронного поворота захватных рычагов, оснашенных призматическими губками 2.
Ось 3 центрирования зажимаемой цилиндрической детали 4 лежит на оси симметрии схвата. Каждый из захватных рычагов выполнен в виде шарнирно-рычажного четырехзвенного механизма, состоящего из ведущего звена 5, ведомого звена 6 и сое- динитсльпо|-о звена 7. Опорные шарниры 8 и 9 соответственно ведущего 5 и ведомого 6 звеньев смонтированы в корпусе, а соединительные шарниры 10 и 11 ведушего и ведомо1 о звеньев связывают их с соединительным звеном 7, несущим на своем продолжении призматическую губку 2. Приче.м ведущее звено 5 непараллельно ведомому звену 6, так же как и соединительное 3iieiio 7 непараллельно липии, соедипяющей опорные шарниры 8 и 9 звеньев вследствие разности в их д.-1инах. Длины звеньев и но. южения шарниров в шарнирно-рычажном механизме выбраны из условия, по которому в процессе их синхронного встречного поворота при зажиме цилиндрических деталей 4 в заданном диапазоне диаметров соединительные звенья 7 с призматическими 1 убками 2 должны осуществлять дополнительный поворот вокруг оси 3 центрирования. Для выполнения указанного условия длины звеньев и положения 1иарниров связаны друг с другом и с углом дополнительного поворота системой уравнений:
(X, ,-X/)4(Y, ,--Y,)
(X, i-X,),.2-Y.) (X,з -X,)-+(V,.i-Y.) при
Х, Х,+ К51пе, + 1с05ф,
Y, RcosB,-|- 151Пф,
Y, arctgR(cose,- cosei) X -RsinOi
где в системе координат с осью абсцисс, проходящей через опорные шарниры ведущих звеньев, и осью ординат, расположенной в нлоскости симметрии схвата, проходящей через ось центрирования;
i 1, 2, 3 - положения механизма, крайние из которых определяют диапазон зажимаемых деталей; Х,,У, - координаты i-ro положения соединительного шарнира 11 ведо- мого звена 6;
X,, УГ - координаты опорного шарнира
ведомого звена 6; г - длина ведомого звена 6; R - длина ведущего звена 5; 1 - длина соединительного звена 7,
несущего призматическую губку 2; X, - абсцисса огюрного шарнира
ведущего звена;
fl, - угловое положение ведущего 5звена 5 относительно оси ординат;
ф,- угловое положение соединительного звена относительно оси абсцисс.
0 Например, если длина 1 соединительного звена 7 выбрана равной абсциссе Х опорного шарнира 8 ведущего звена 5, то длина г ведомого звена 6 будет равна половине длины R ведущего звена 5.
Схват работает следующим образом. 5 В исходном положении зажимные рычаги, выполненные в виде щарнирно-рычаж- ных четырехзвенных механизмов с призматическими губками 2, разведены. Нри включении иривода 1 его движение вниз передается ведущим звеньям 5, соверщающим
0
5
при этом синхронный встречный поворот
относительно опорных шарннров 8. Через соединительные звенья 7 движение от ведущих звеньев 5 нередается ведомым звеньям 6, которые также совершают свой синхронный встречный поворот вокруг опорных шар5 ниров 9. Сами соединительные звенья 7 перемещают при этом установленные на них призматические губки 2 навстречу друг другу к зажимаемой цилиндрической детали 4. Вследствие различия в длинах непараллельд ных ведущих 5 и ведомых 6 звеньев, назначенных в соответствии с приведенными зависимостями, их соединительные шарниры 10 и 11 при повороте указанных звеньев описывают траектории, представляющие собой дуги окружностей разной кривизны,
5 дополнительно поворачивая тем самым соединительные звенья 7 относительно звеньев 5 и 6 вокруг одного центра, с которым совпадает ось 3 центрирования детали 4. За счет этого дополнительного поворота соединительные звенья 7 переносят призматичес0 кие губки 2, постоянно направляя их к оси 3 центрирования.
Таким образом, в схвате при выполнении захватиых рычагов в виде шарнирно- рычажных четырехзвенных механизмов с непараллельными звеньями, имеющими длины и положения щарниров, связанные друг с другом и с углом дополнительного поворота, назначенными из зависимостей, приведенных выще, обеспечивается с заданной
точностью постоянство положения оси центрирования цилиндрических деталей различных диаметров в заданном диапазоне при относительной простоте конструкции в сравнении с известными решениями.
Формула изобретения
1. Схват манипулятора, содержащий корпус, привод синхронного поворота захватных рычагов, выполненных в виде шарнир- но-рычажных механизмов, соединительные звенья которых, несущие призматические губки, установлены с возможностью дополнительного поворота вокруг постоянной оси центрирования цилиндрических деталей, отличающийся тем, что, с целью упрощения конструкции и повышения точности позиционирования, шарнирно-рычажные механизмы выполнены четырехзвенными, у которых длины звеньев и положения опорных шарниров связаны друг с другом и с углом дополнительного поворота системой уравнений:
(X, ,)-X.)4(Y, ,-Y.
(X,2-X.)4(Y,,)r
(X,3-X.)-+(Y,3-Y.) при
Х, Х,+ К51п6,-(-1со5ф,
Y,Rcose,+lsin(p,
„R(cos9,-cosei)
(p,arctg
X -RsinG,
где в системе координат с осью абсцисс, проходящей через опорные щарниры ведущих звеньев, и осью ординат, расположенной в плоскости симметрии схвата, проходящей через ось центрирования; i 1, 2, 3 - положения механизма, крайние из которых определяют диапазон зажимаемых деталей; X,, Y, - координаты i-ro положения соединительного щарнира ведомо- 0го звена;
X,, Yr - координаты опорного щарнира
ведомого звена г -длина ведомого звена; R - длина ведущего звена; 1 - длина соединительного звена, 5несущего призматическую губку;
X - абсцисса опорного щарнира ведущего звена;
9, - угловое положение ведущего звена относительно оси ординат; ф, - угловое положение соединительного звена относительно оси абсцисс.
2. Схват манипулятора по п. 1, отличающийся тем, что, с целью упрощения конструкции, длина соединительного звена, 5 несущего призматическую губку, выбрана равной величине абсциссы опорного шарнира ведущего звена, при этом длина ведомого звена равна половине длины ведущего звена.
0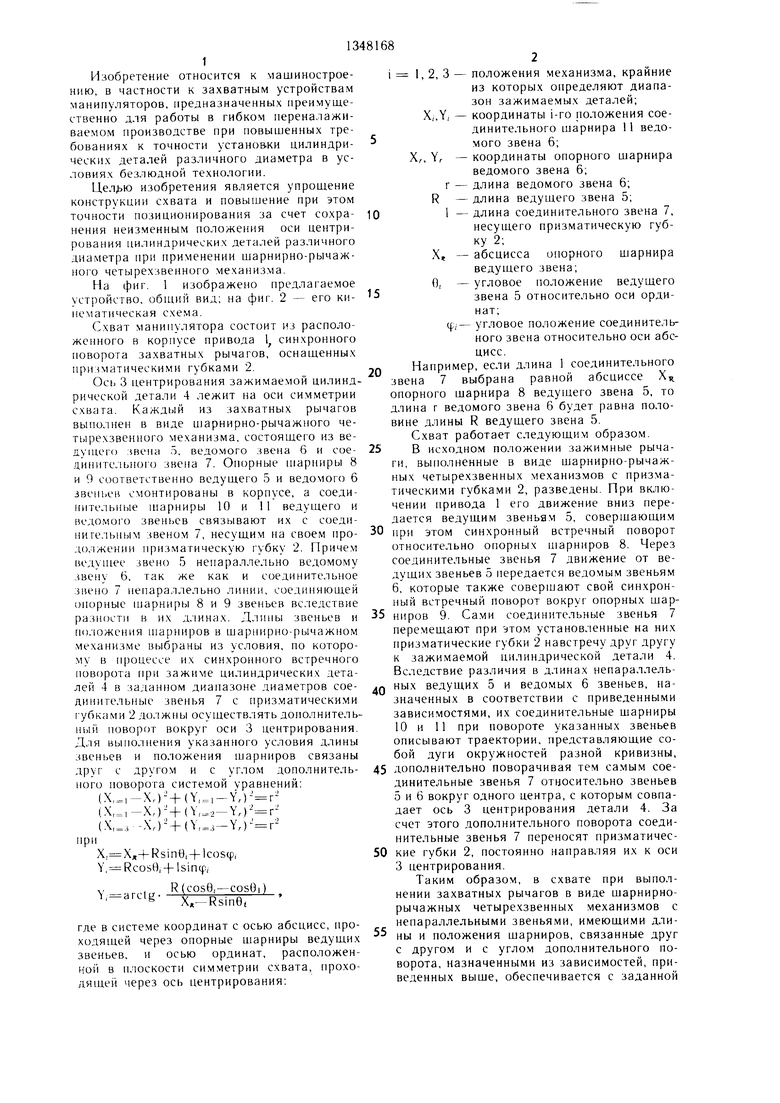
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2008 |
|
RU2390406C1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| Схват | 1983 |
|
SU1085811A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов, предназначенных преимущественно для работы в гибком переналаживаемом производстве при повышенных требованиях к точности установки аилиндричес ких дета.1ей различного диаметра в ус.ювиях без.пюдной технологии. Пель изобретения упрощение конструкции и повышение точности позиционирования за счет сохранения неизменным положения оси центрирования цилиндрических деталей различного диаметра и применения схемы ц арпирпо-рычажного механизма с меньши.м числом звеньев, уменьшаюшей влияние сопряжений его отдельных звеньев на положение оси центрирования. При включении привода 1 синхронного поворота захватных рычагов, выr(JЛнeн- ных в виде ц арнирно-рычажных четырехзвеп- ных механизмов, состояидих из ведущих 5. во- домьгх 6 и соединительных звеньев, призматические губки 2, установленные на нродо; - жении соединительных 7 звеньев, постоянно направ.лены к оси центрирования 3 за счет соотн01нения длин звеньев и nt),io- жений опорных 1парниров, назначаемых в соответствии с определенными зависимостями. 1 з.п. ф-лы, 2 ил. о (Л со 4 00 о 00
| Грузозахватное устройство | 1979 |
|
SU812571A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| Т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рычажные механизмы | |||
| М.: Наука, 1970, с | |||
| Ситценабивная машина | 1922 |
|
SU391A1 |
| Захват | 1972 |
|
SU440249A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
