ли. Для этого приспособление-спутник снабжено механизмом перехвата зажима и поворота деталей, выполненным в виде поворотной кинематически связанной с. цилиндг ом 11 платформы 12 с зажимными элементами 16, между которыми расположен также поворотный кинематически связанный чераэ сцепную
Изобретение относится к станко- строеншо, в частности к приспособлениям-спутникам для автоматических линий метштлообработки деталей
Цель изобретения - расширение тех нологических возможностей.
Указанная цель достигаетс51 возможностью автоматической смены базовых поверхностей деталейS а также ее поворота и за счет этого - обработки Iбазовых поверхностей деталей„
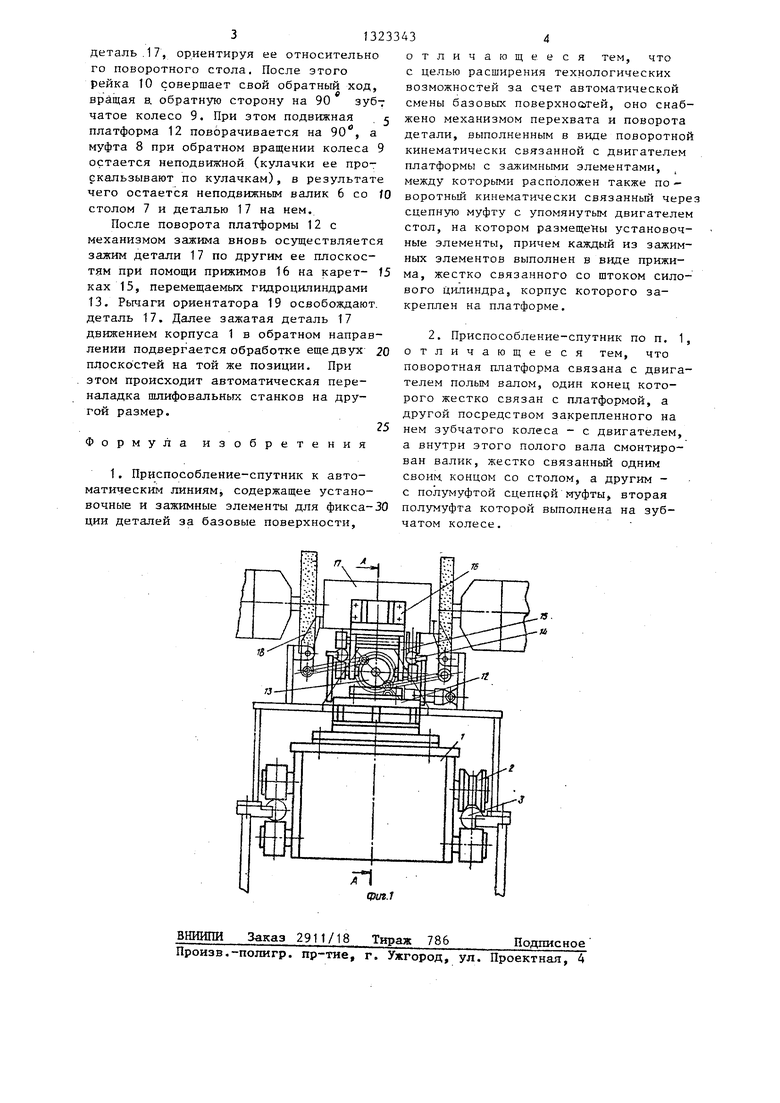
На фиг, 1 представлено приспособление-спутник, общий вид; на фиг, 2 разрез А-А на Фиг. 1.
Приспособление-спутник содержит корпус 1 с. роликами 2 для его перемещения по направляющим 3 автолинии (или станка), На корпусе 1 неподвижн закреплен стакан 4., в котором с возможностью поворота смонтирован полый |зал 5, внутри которого установлен поворотный валик 6 с поворотным столом 7, смонтированным на его верхнем конце. На нгокнем конце валика 6 закреплена муфта 8 обратного хода, кулачки которой находятся в постоянном зацеплении с кулачками, выполненными на зубчатом колесе 9, закрепленном на конце полого вала 5. Зубчатое колесо 9 взаимодействует со штоком-рейкой 10 гидроцилиндра 11 поворота, установленного на корпусе 1, Ниже уровня поворотного стола на полом валу 5 нсестко закреплена платформа 12, имеющая две противоположные площадки, на каждой из которых установлен гидроцилиндр 13 и смонтированы направляющие 1А с установленной на них кареткой 15, на
которой закреплен прижим тали 17.
о для деаю
1323343
муфту 8 с цилиндром 1 1 стол 7, на котором размещены установочные элементы,- причем каждый из зажимных элементов 16 выполнен в виде прижима, 5 жестко связанного с силовым цилиндром 13 с возможностью радиального перемещения от последнего. 1 з,п. ф-лы. 2 ил.
O
5
0
5
0
5
0
Приспособление-спутник работает следующим образом.
Обрабатываемая деталь 17 поступает на поворотный стол 7, с помощью ориентатора 18 ориентируется относительно поворотного стола 7, являющегося базой при обработке и ось вращения icoToporo совмещена с осью привода рычагов ориентатора, и зажимается прижимами 16.
Ориентатор 18 смонтирован на станине автолинии, по направляющим 3 которой переметается корпус 1, и представляет собой механизм, выполненный в виде двух рычагов, соединенных с поворотным диском, получающим врапхение от цилиндра. В таком положении деталь переносится к позиции обработки, например к шлифовальным станкам. При этом обрабатываются две плоскости детали 17,, свободные от ггршсимов 16, Поворот детали в горизонтальной плоскости после обработки двух ее свободных от прижимов сторон на
р. Q
Уи осуществляется в ее зажатом состоянии при остановке приспособления.
Для этого ходом рейки 10 от гидро- цилнндра 11 поворачивается на 90 зуб чатое колесо 9, а вместе с ним полый вал 5 с платформой 12, и посредством взаимодействия кулачков шестерен 9 и муфты 8 поворачивается валик 6 с поворотным столом 7 и с зажатой на нем деталью 17„ ,Цля осуществления обработки двух других плоскостей детали 17 необходимо освободить их от прижимов 16 и зажать деталь по уже обработанным плоскостям. Для этого гидроцилиндры 13, двигая каретки 15 с прижимами 16, разжимают деталь, рычаги ориентатора 19, установленные в зоне поворота детали, перехватывает
деталь. 17, ориентируя ее относительно го поворотного стола. После этого рейка 10 совершает свой обратный ход, вращая а обратную сторону на 90 зубчатое колесо 9. При этом подвижная , j платформа 12 поворачивается на 90, а муфта 8 при обратном вращении колеса 9 остается неподвижной (кулачки ее проскальзывают по кулачкам), в результате чего остается неподвижным валик 6 со 10 столом 7 и деталью 17 на нем.
После поворота платформы 12 с механизмом зажима вновь осуществляется зажим детали 17 по другим ее плоскостям при помощи прижимов 16 на карет- 15 ках 15, перемещаемых гидроцилиндрами 13. Рычаги ориентатора 19 освобождают, деталь 17. Далее зажатая деталь 17 движением корпуса 1 в обратном направлении подвергается обработке еще двух 20 плоскостей на той же позиции. При этом происходит автоматическая переналадка шлифовальных станков на другой размер.
Формула изобретения
1. Приспособление-спутник к автоматическим линиям, содержащее установочные и зажимные элементы для фикса-30 ции деталей за базовые поверхности.
отличающееся тем, что с целью расширения технологических возможностей за счет автоматической смены базовых поверхноатей, оно снабжено механизмом перехвата и поворота детали, выполненным в виде поворотной кинематически связанной с двигателем платформы с зажимными элементами, между которыми расположен также по - воротный кинематически связанный через сцепную муфту с упомянутым двигателем стол, на котором размещены установочные элементы, причем каждый из зажимных элементов выполнен в виде прижима, жестко связанного со штоком силового цилиндра, корпус которого закреплен на платформе.
2. Приспособление-спутник по п. 1, отличающееся тем, что поворотная платформа связана с двигателем полым валом, один конец которого жестко связан с платформой, а другой посредством закрепленного на нем зубчатого колеса - с двигателем, а внутри этого полого вала смонтирован валик, жестко связанный одним своим концом со столом, а другим - с полумуфтой сцепнрй муфты, вторая полумуфта которой выполнена на зубчатом колесе.
ВНИИПИ Заказ 2911/18 Тираж 786
Подписное
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Подписное
ектная, 4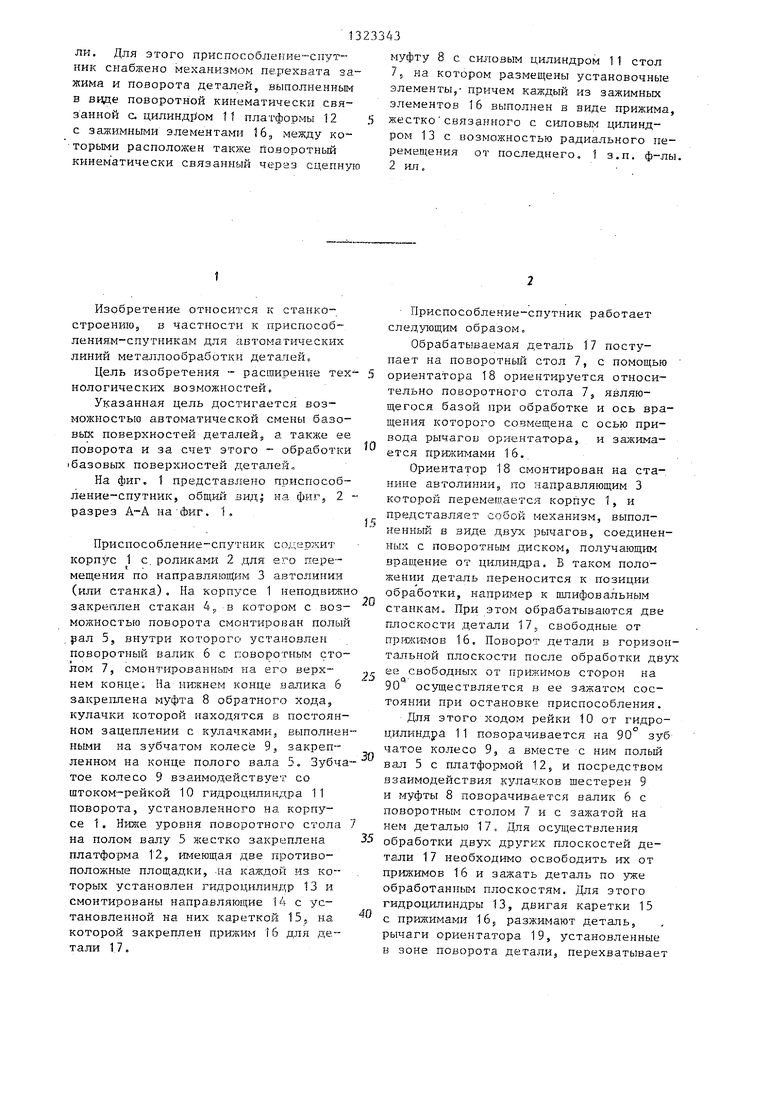
| название | год | авторы | номер документа |
|---|---|---|---|
| Алмазно-расточной станок | 1978 |
|
SU841795A1 |
| Автоматическая сборочная линия спутникового типа | 1988 |
|
SU1625558A1 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| Автоматическая линия для обработки деталей | 1985 |
|
SU1289656A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Автоматическая линия для обработки деталей | 1989 |
|
SU1712128A1 |
| Устройство для перегрузки спутников | 1988 |
|
SU1579712A1 |
| Линия спутникового типа | 1989 |
|
SU1646798A1 |
| Многоцелевой станок | 1989 |
|
SU1660937A1 |
| Металлорежущий станок | 1980 |
|
SU956240A2 |
Изобретение относится к области станкостроения, в частности к -приспособлениям-спутникам для автоматических линий металлообработки деталей. Цель изобретения - расширение технологических возможностей. Указанная цель достигается возможностью автоматической смены базовых поверхностей детали 17, а также ее поворота и за счет этого обработки базовых поверхностей дета(О -/4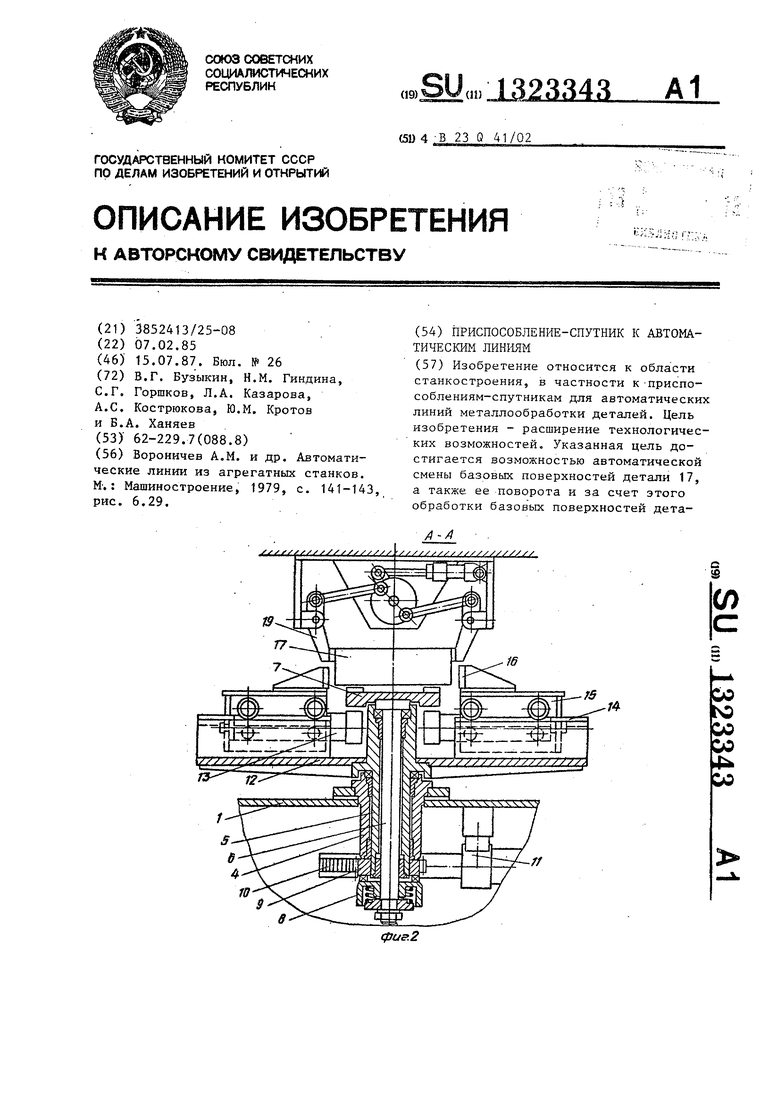
| Вороничев A.M | |||
| и др | |||
| Автоматические линии из агрегатных станков | |||
| М-.: Машиностроение, 1979, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
