Заявляемое изобретение относится к области автоматического управления динамическими объектами, в частности летательными аппаратами.
Известен способ управления динамическими объектами [Ройтенберг Я.Н. Автоматическое управление. - М.: Наука, 1978, с.225-226], заключающийся в том, что по известным координатам состояния объекта определяют величину ошибки, равную разности между заданными входными координатами и соответствующими текущими координатами объекта. Команды управления объектом формируются в соответствии с величинами ошибки и коэффициентов пропорциональности, которые вычисляются на основе решения уравнения Риккати.
Недостатком указанного способа управления является невозможность обеспечить в полной мере заданные требования по качеству и устойчивости управления в условиях неконтролируемых возмущений, особенно линейными нестационарными и нелинейными объектами.
Наиболее близким к заявляемому является способ управления динамическими объектами [Крутько П.Д. Обратные задачи динамики в теории автоматического управления. - М.: Машиностроение, 2004, с.44-46], заключающийся в определении текущих координат объекта, формировании по разности между измеренными и заданными значениями управляемых координат сигнала управления таким образом, чтобы при увеличении коэффициента усиления регулятора в прямой цепи управления замкнутой системы обеспечивалось асимптотическое приближение траектории движения управляемого объекта к желаемой траектории.
Недостатками известного способа управления являются следующие:
- ограничение класса реализуемых заданных траекторий движения объекта только экспоненциальным классом траекторий;
- свойства замкнутой системы управления зависят от функциональных особенностей и инерционных характеристик объекта, требуемые свойства достигаются только в асимптотическом режиме работы регулятора.
Задачей изобретения является обеспечение возможности реализации произвольно заданных непрерывных траекторий движения объекта с учетом его динамических свойств, компенсации возможных отклонений текущей траектории от заданной из-за действия неконтролируемых возмущений объекта, а также обеспечение требований по качеству управления (перерегулирование, время регулирования) и устойчивости, предъявляемых к замкнутой системе, реализующей способ управления.
Выполнение поставленной задачи достигается тем, что согласно предлагаемому способу управления динамическими объектами, предусматривающему определение текущих координат объекта и сравнение их с заданными значениями, определяют вектор состояния динамического объекта как решение уравнения
у(t)=f(у,u,а),
где у(t) - вектор состояния размерности n;
f(·) - известная векторная функция, непрерывно дифференцируемая требуемое число раз по своим аргументам;
u - вектор управления размерности k≤n;
а - известные параметры объекта управления;
и на основании полученных сигналов, соответствующих элементам состояния объекта, и сигналов заданных значений, соответствующих элементам заданной траектории, формируют сигнал, соответствующий вектору управления, таким образом, чтобы функционал качества
J=Q(у, u, t, уз),
где Q - положительно определенная скалярная функция;
t - текущий момент реального времени;
уз - вектор заданной траектории движения размерности k;
принимал экстремальное значение при дополнительно введенном ограничении в форме векторного дифференциального уравнения
ϕ(F(k), F(k-1), ... F(j), ..., F, λ)=0,
где ϕ(·) - вектор-функция заданного вида, которая устанавливает требования к устойчивости поведения объекта относительно заданной траектории движения;
где F - вектор-функция отклонений от заданной траектории;
F(j) - производная j-го порядка;
j=1, 2, ..., k;
λ - параметры, представляющие собой постоянные числа, обеспечивающие заданные динамические свойства замкнутой системе управления;
причем структуру вектора управления
u=u(λ, у, уз, а)
определяют путем решения уравнения ограничений в виде
Ψ(u(k), u(k-l), ... u, y, уз, а)=0,
где ψ(·) - вектор-функция, обратная функции ϕ(·) относительно искомого вектора управления u;
а параметры λ найденного таким образом вектора управления определяют процедурой оптимизации функционала качества J относительно параметров λ на каждом интервале времени, соответствующем циклу управления.
На чертеже представлена блок-схема замкнутой системы, реализующей заявляемый способ.
Система включает в себя динамический объект 1 управления, формирователь 2 заданной траектории 2, формирователь 3 ограничения, вычислительный блок 4 и блок 5 оптимизации. Выход объекта 1 соединен с первым входом формирователя 3 ограничения, второй вход которого соединен с выходом формирователя 2 заданной траектории, третий вход соединен с выходом блока 5 оптимизации, а выход подключен к входу вычислительного блока 4. Выход вычислительного блока 4 подключен к первому входу блока 5 оптимизации, второй и третий входы которого соединены соответственно с выходами формирователя 2 заданной траектории и объекта 1, и к входу объекта 1 управления.
Способ реализуют следующим циклом функционирования системы. Сигналы, соответствующие элементам вектора состояния у(t) объекта 1, поступают в формирователь 3 ограничения вместе с сигналами, соответствующими элементам вектора у3 заданной траектории из формирователя 2 и сигналами, соответствующими параметрам λ из блока 5 оптимизации, где формируется ограничение на поведение векторной функции F. В вычислительном блоке 4 определяется вектор управления и путем разрешения уравнения ψ(·)=0 относительно искомого вектора и и его k первых производных. В блоке оптимизации 5 на каждом интервале времени, соответствующем циклу управления, осуществляется уточнение параметров λ для обеспечения экстремума функционала J, задающего требования к качеству управления объектом 1. Уточненные параметры λ поступают в формирователь 3 ограничения. Затем цикл процесса управления повторяют, выполняя на каждом его шаге указанную последовательность действий.
Предлагаемый способ управления динамическими объектами обеспечивает по сравнению с прототипом следующие преимущества:
- замкнутой системе управления обеспечиваются заданные свойства по качеству управления для любых непрерывных заданных траекторий;
- непосредственный учет структуры объекта и его параметров в законе управления делает систему управления адаптивной к изменению их значений;
- обеспечиваются заданные требования устойчивости объекта по всем управляемым координатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| АДАПТИВНЫЙ СПОСОБ ОПТИМИЗАЦИИ С МНОЖЕСТВЕННОЙ ПРИСТРЕЛКОЙ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ТРАЕКТОРИЙ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2545539C2 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МНОГОСТЕПЕННОГО МАНИПУЛЯТОРА | 2021 |
|
RU2771456C1 |
| СПОСОБ РАСЧЕТА ДВИЖЕНИЯ С КОРРЕКЦИЕЙ ОККЛЮЗИЙ | 2012 |
|
RU2517727C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Способ децентрализованного управления распределенной обобщенной сетью, включающей подвижные роботизированные средства и стыковочные станции | 2020 |
|
RU2781391C2 |
| Следящая система автоматического управления нестационарным динамическим объектом | 2018 |
|
RU2692204C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
Изобретение относится к области автоматического управления динамическими объектами, обеспечивающего их движение по заданной траектории. Технический результат изобретения заключается в обеспечении возможности реализации произвольно заданных непрерывных траекторий движения объекта с учетом его динамических свойств, компенсации возможных отклонений текущей траектории от заданной из-за действия неконтролируемых возмущений объекта, а также обеспечении требований по качеству управления и устойчивости, предъявляемых к замкнутой системе. Технический результат достигается за счет того, что определяют вектор состояния динамического объекта и на основании полученных сигналов, соответствующих элементам состояния объекта, и сигналов заданных значений, соответствующих элементам заданной траектории, формируют сигнал управления таким образом, чтобы функционал качества с учетом дополнительного ограничения, которое устанавливает требования к устойчивости поведения динамического объекта относительно заданной траектории, принимал экстремальное значение. 1 ил.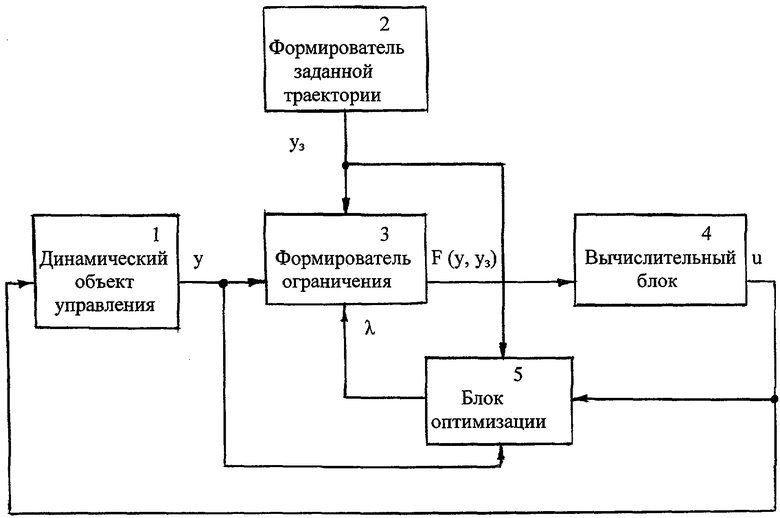
Способ управления динамическими объектами, при котором производят сравнение сигналов с динамического объекта управления, соответствующих вектору состояния динамического объекта управления у, и сигналов с формирователя заданной траектории уз и на основе полученных результатов формируют в вычислительном блоке сигнал, соответствующий вектору управления u, отличающийся тем, что для формирования сигнала, соответствующего вектору управления, сигналы с динамического объекта управления и с формирователя заданной траектории подают в формирователь ограничения векторной функции F(у,уз), куда также с блока оптимизации поступает сигнал уточненных параметров λ, обеспечивающих заданные динамические свойства замкнутой системе управления, сформированный на основе сигналов с динамического объекта управления, с формирователя заданной траектории и с вычислительного блока таким образом, чтобы функционал качества управления J принимал экстремальное значение, сформированный сигнал ограничения векторной функции F подают в вычислительный блок, где сигнал, соответствующий вектору управления, формируется как решение уравнения ограничения ψ(·)=0 относительно искомого вектора управления и его k первых производных.
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2255024C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |
| US 4171115 А, 16.10.1979. | |||

