Изобретение относится к транспортному машиностроению, а именно к транспортным средствам, снабженным объемной гидравлической трансмиссией и управляемым путем полной или неполной остановки бортовых движителей, и может быть использовано в системах управления движением строительных и дорожных машин, например гидравлических погрузчиков с бортовым поворотом.
Известна система управления движением погрузчика с бортовым поворотом ПУМ-500 [1], включающая источник давления рабочей жидкости - регулируемый аксиально-поршневой насос, объемную гидравлическую трансмиссию, содержащую реверсивные гидромоторы, соединенные с валами колесного или гусеничного движителей, средство гидрораспределения, выполненное в виде гидрораспределителя и кинематически связанное с органом управления движением. При перемещении органа управления движением он своими тягами кинематически воздействует на поводки золотников гидрораспределителя, который, в свою очередь, изменяет направление движения рабочей жидкости гидравлической системы и регулирует расход рабочей жидкости в нагнетающих полостях гидромоторов. При этом транспортное средство посредством бортовых движителей перемещается в заданном органом управления направлении со скоростями пропорциональными величине отклонения органа управления.
Известна система управления движением погрузчика с бортовым поворотом «Locust 1203» [2], содержащая источник давления рабочей жидкости - регулируемый аксиально-поршневой насос, орган управления движением, содержащий рукоятку управления, кинематически соединенную с клапанами гидравлической системы управления, которые воздействуют на сервопоршни, перемещающие золотники гидрораспределителей, гидравлически соединенных с гидромоторами бортовых движителей.
Недостатками известных систем управления являются: сложность, многокомпонентность и эргономически неоптимальное управление движением и поворотом при помощи двух рукояток, размещенных под правой и левой руками оператора. Недостатки приводят к снижению надежности системы управления транспортным средством при его эксплуатации.
Известна система управления транспортным средством, принятая в качестве прототипа [3], содержащая источник давления рабочей жидкости, бустеры остановочных тормозов, реверсивные гидромоторы, соединенные валами с бортовыми движителями, орган управления движением, состоящий из шарнирно закрепленной рукоятки управления и тяг, средство гидрораспределения, выполненное в виде трех двухпозиционных трехлинейных гидрораспределителей, на золотниках которых закреплены поводки, шарнирно соединенные с тягами органа управления, и гидравлически сообщающееся с источником давления, бустерами остановочных тормозов и с реверсивными гидромоторами, при этом первые линии гидрораспределителей сообщены с источником давления, вторая линия гидрораспределителя, связанного с органом управления движением, сообщена с третьими линиями двух других гидрораспределителей, третья линия сообщена со штуцером слива, а вторые линии гидрораспределителей, связанных с органом управления движением, сообщены с соответствующими бустерами остановочных тормозов.
Недостатками прототипа являются сложность в изготовлении и повышенный износ колес движителя. При поворотах транспортного средства движитель отстающего борта затормаживается, что приводит к повышенному износу колес движителя, т.е. к удорожанию эксплуатации.
Задачами, на решение которых направлено предлагаемое изобретение, являются: упрощение конструкции системы управления транспортным средством и снижение затрат на эксплуатацию транспортного средства.
Технический результат достигается тем, что в системе управления движением транспортного средства, содержащей источник давления рабочей жидкости, бустеры остановочных тормозов, реверсивные гидромоторы, соединенные валами с бортовыми движителями, орган управления движением, состоящий из шарнирно закрепленной рукоятки управления и тяг, средство гидрораспределения, выполненное в виде трех двухпозиционных трехлинейных гидрораспределителей, на золотниках которых закреплены поводки, шарнирно соединенные с тягами органа управления и гидравлически сообщающееся с источником давления, бустерами остановочных тормозов и с реверсивными гидромоторами, при этом первые линии гидрораспределителей сообщены с источником давления, вторая линия гидрораспределителя, связанного с органом управления движением, сообщена с третьими линиями двух других гидрораспределителей, третья линия сообщена со штуцером слива, а вторые линии гидрораспределителей, связанных с органом управления движением, сообщены с соответствующими бустерами остановочных тормозов. Средство гидрораспределения выполнено в виде четырех трехпозиционных четырехлинейных гидрораспределителей, два из которых объединены стяжкой, соединяющей золотники этих гидрораспределителей с поводком, шарнирно соединенным с тягой органа управления движением. Первые линии всех гидрораспределителей сообщены каналами между собой и с источником давления, вторые линии сообщены каналами между собой и со штуцером слива, третьи и четвертые линии одного из гидрораспределителей и одного из объединенных стяжкой гидрораспределителей сообщены каналами между собой и со штуцерами нагнетания и слива одного из реверсивных гидромоторов, третьи и четвертые линии другого гидрораспределителя и второго из объединенных стяжкой гидрораспределителей сообщены каналами между собой и со штуцерами нагнетания и слива другого реверсивного гидромотора. Тяги, взаимодействующие с поводками не объединенных стяжкой гидрораспределителей, снабжены регулируемыми упорами и выполнены с возможностью возвратно-поступательного перемещения относительно установленных посредством упругих элементов в нейтральное положение поводков этих гидрораспределителей. Величина перемещения рукоятки управления, снабженной избирателем направления перемещения, ограничена пазами этого избирателя таким образом, что поводок объединенных стяжкой гидрораспределителей имеет возможность перемещения на полный рабочий ход в обе стороны относительно своего нейтрального положения при обеспечении возможности одновременного перемещения поводка одного из не объединенных стяжкой гидрораспределителей на величину, ограниченную расстоянием между регулируемыми упорами тяги поводка другого гидрораспределителя. Величина перемещения поводков не объединенных стяжкой гидрораспределителей ограничена в пределах от их нейтрального положения до полного рабочего хода в одну сторону при одновременном перемещении поводка другого гидрораспределитедя в пределах от его нейтрального положения до полного рабочего хода в другую сторону за вычетом расстояния между регулируемыми упорами тяги этого поводка и при одновременном блокировании перемещения поводка объединенных стяжкой гидрораспределителей.
На чертеже приведена принципиальная схема системы управления движением транспортного средства.
Система управления движением транспортного средства содержит линии 1, 2, 3 и 4 гидроуправления, источник 5 давления рабочей жидкости, например регулируемый аксиально-поршневой насос, соединенный с двигателем «Д» внутреннего сгорания транспортного средства. Правый реверсивный гидромотор 6 и левый реверсивный гидромотор 7 соединены приводными валами 8 и 9, соответственно, с бортовыми правым движителем 10 и левым движителем 11. Движители 10 и 11 состоят из колес со встроенными в них бустерами остановочных тормозов. Орган 12 управления движением состоит из установленного на шарнирах карданного узла 13 с рукояткой 14 управления. Нейтральное положение карданного узла 13 с рукояткой 14 управления обеспечивается применением упругих элементов 15, например витых пружин. Средство гидрораспределения содержит четыре трехпозиционных четырехлинейных гидрораспределителя 16, 17, 18 и 19, два из которых 16 и 17 объединены стяжкой 20. На золотниках гидрораспределителей 18 и 19 закреплены поводки 21 и 22, кинематически связанные тягами 23 и 24 с карданным узлом 13. Поводки 21 и 22 снабжены упругими элементами 15, посредством которых поводки устанавливаются и удерживаются в нейтральном положении. Линии 1, 2, 3 и 4 гидроуправления гидрораспределителей 16 и 17 каналами 25 гидравлически сообщены с источником 5 давления рабочей жидкости и с реверсивными гидромоторами 6 и 7. Гидрораспределители 16 и 17 гидравлически, посредством каналов 25, соединены с правым 19 и левым 18 трехпозиционными четырехлинейными гидрораспределителями. Линии 1 гидрораспределителей 18 и 19 сообщены каналами между собой и с источником 5 давления рабочей жидкости, линии 2 этих же гидрораспределителей сообщены каналами 25 между собой и со штуцером 26 слива. Линии 3 и 4 гидрораспределителей 16 и 17 сообщены каналами 25 с соответствующими штуцерами нагнетания «Н» и слива «С», соответственно правого и левого гидромоторов 6 и 7 и с линиями 3 и 4 соответствующих правого и левого гидрораспределителей 18 и 19. Тяги 23 и 24 снабжены верхними 27 и нижними 28 регулируемыми упорами. Орган управления 12 шарнирно соединен регулируемой тягой 29 со стяжкой 20. Величина перемещения рукоятки 14 управления ограничена пазами избирателя 30 направления перемещения. Пазы «А» и «Б» избирателя 30 обеспечивают перемещение рукоятки 14 управления таким образом, что стяжка 20 и поводки гидрораспределителей 16 и 17 имеют возможность перемещения на полный рабочий ход в обе стороны относительно своего нейтрального положения, при этом обеспечиваются возможности для одновременного с поводками гидрораспределителей 16 и 17 перемещения поводков 21 и 22 гидрораспределителей 18 и 19 в пределах свободного хода между регулируемыми упорами тяг 27 и 28. Перемещение рукоятки 14 управления в пределах пазов «В» и «Г» избирателя 30 ограничивает перемещение поводков 21 или 22 гидрораспределителей 18 и 19 в пределах от их нейтрального положения до полного рабочего хода в одну сторону, при одновременном перемещении другого поводка в пределах от нейтрального положения до полного рабочего хода за вычетом расстояния между регулируемыми упорами 27 и 28 тяг 23 и 24, при одновременном блокировании перемещения стяжки 20 поводков золотников гидрораспределителей 16 и 17.
Система управления движением транспортного средства работает следующим образом. Двигатель «Д» внутреннего сгорания обеспечивает работу источника 5 давления рабочей жидкости. Рабочая жидкость по каналам 25 подается к штуцерам линий 1 гидрораспределителей 16, 17, 18 и 19. При движении транспортного средства вперед рукоятка 14 управления перемещается в направлении паза «А» избирателя 30, при этом тяга 29 перемещается вверх и тянет за собой стяжку 20 и связанные с ней золотники гидрораспределителей 16 и 17. Рабочая жидкость из линий 1 гидрораспределителей 16 и 17 поступает в линии 3 и далее по каналам 25 поступает к штуцерам нагнетания "Н" гидромоторов 6 и 7, которые одновременно начинают вращение в одном направлении. Рабочая жидкость, пройдя через гидромоторы 6 и 7, через штуцеры слива «С», по каналам 25 и линиям 4 и 2 поступает в штуцер слива 26. Транспортное средство движется вперед со скоростью, которая зависит от сопротивления движению и угла поворота рукоятки 14 управления. Движение назад производится аналогично при переводе рукоятки 14 управления в направлении паза «Б» избирателя 30. При необходимости поворота во время движения достаточно перевести рукоятку 14 управления в пределах паза «А» в сторону поворота на величину, пропорциональную радиусу поворота. При повороте направо рукоятка 14 управления перемещается вправо, при этом тяга 23 идет вверх и перемещает поводок 21 гидрораспределителя 18, при этом соединяются линии 1 и 3 гидрораспределителя 18 и рабочая жидкость начинает поступать по каналам 25 к штуцеру нагнетания «Н» гидромотора 7. Гидромотор 7, получив дополнительный расход рабочей жидкости, начнет вращаться с большей угловой скоростью, пропорциональной увеличению расхода. Транспортное средство будет совершать плавный поворот вправо, радиус которого зависит от угла поворота рукоятки 14 управления. Поворот транспортного средства при движении назад производится аналогично. Поворот на месте производится двумя способами. Во-первых, при необходимости плавного поворота, например, вправо, рукоятка 14 управления переводится вправо по направлению паза «Г» избирателя 30, при этом тяга 23 гидрораспределителя 18 переместится вверх и рабочая жидкость через соединившиеся линии 1 и 3 по каналам 25 поступит в штуцер нагнетания «Н» гидромотора 7, при этом гидромотор 6 останется заторможенным до тех пор, пока противоположная тяге 23 тяга 24 будет перемещаться в пределах своего свободного хода между регулируемыми упорами 27 и 28 тяги 24. Транспортное средство совершит поворот вправо вокруг центра площади контакта с грунтом движителя 10. Поворот влево производится аналогично переводом рукоятки 14 управления влево в направлении паза «В» избирателя 30. Во-вторых, при необходимости быстрого поворота на месте, например, вправо, рукоятка 14 управления переводится вправо в положение до упора в край паза «Г» избирателя 30, при этом движитель 11, как описано выше, движется вперед. Тяга 24 переместится вниз и начнет взаимодействовать своим верхним регулируемым упором 27 на поводок 22, при этом золотник гидрораспределителя 19 также переместится вниз, в результате чего рабочая жидкость от источника 5 давления через соединившиеся линии 1 и 4 по каналам 25 поступит в штуцер «С» гидромотора 6, который начнет вращаться в направлении, противоположном вращению гидромотора 7, при этом транспортное средство начнет поворачиваться на месте вправо вокруг своего центра тяжести. Поворот влево производится аналогично, при переводе рукоятки 14 управления влево в направлении паза «В» избирателя 30. Торможение транспортного средства производится переводом рукоятки 14 управления в нейтральное положение, при этом золотники распределителей 16, 17 18 и 19 перемещаются в нейтральное положение и перекрывают подвод и отвод рабочей жидкости из гидромоторов 6 и 7, тем самым, затормаживая их.
Предлагаемая система управления движением транспортного средства не использует при повороте бустера остановочных тормозов бортовых движителей. Управление поворотом в движении производится увеличением угловой скорости вращения забегающего бортового движителя. При повороте на месте используется вращение движителей в разные стороны, что позволяет упростить гидросистему и снизить затраты на ее эксплуатацию.
Источники информации
1. ПУМ-500, Техническое описание и инструкция по применению, Н.Тагил, ФГУП «ПО» УВЗ», 1990.
2. «LOCUST 1203», Руководство по обслуживанию и уходу, WAY industry, 2002.
3. Система управления транспортным средством. Патент РФ №2075664, МКИ C1 F16D 65/20. Заявлено 05.06.90. Опубликовано 20.03.97. Бюл. №8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2005 |
|
RU2302349C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1990 |
|
RU2075664C1 |
| Устройство поворота транспортного средства | 1990 |
|
SU1733280A1 |
| Гидрообъемная трансмиссия полно-пРиВОдНОгО ТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU823182A1 |
| Гидрообъемная передача для самоходных горных машин с четырьмя ведущими колесами | 1984 |
|
SU1239313A1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2017 |
|
RU2651376C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2012 |
|
RU2501700C1 |
| Трансмиссия землеройно-транспортной машины | 1985 |
|
SU1293049A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
Изобретение может быть использовано в системах управления движением транспортных средств. Система управления движением транспортного средства содержит источник давления рабочей жидкости, бустеры остановочных тормозов, реверсивные гидромоторы, соединенные валами с бортовыми движителями, орган управления движением, состоящий из шарнирно закрепленной рукоятки управления и тяг, и средство гидрораспределения. Средство гидрораспределения выполнено в виде четырех трехпозиционных четырехлинейных гидрораспределителей, два из которых объединены стяжкой. Технический результат заключается в упрощении конструкции системы управления движением транспортного средства и снижении затрат на эксплуатацию транспортного средства. 1 ил.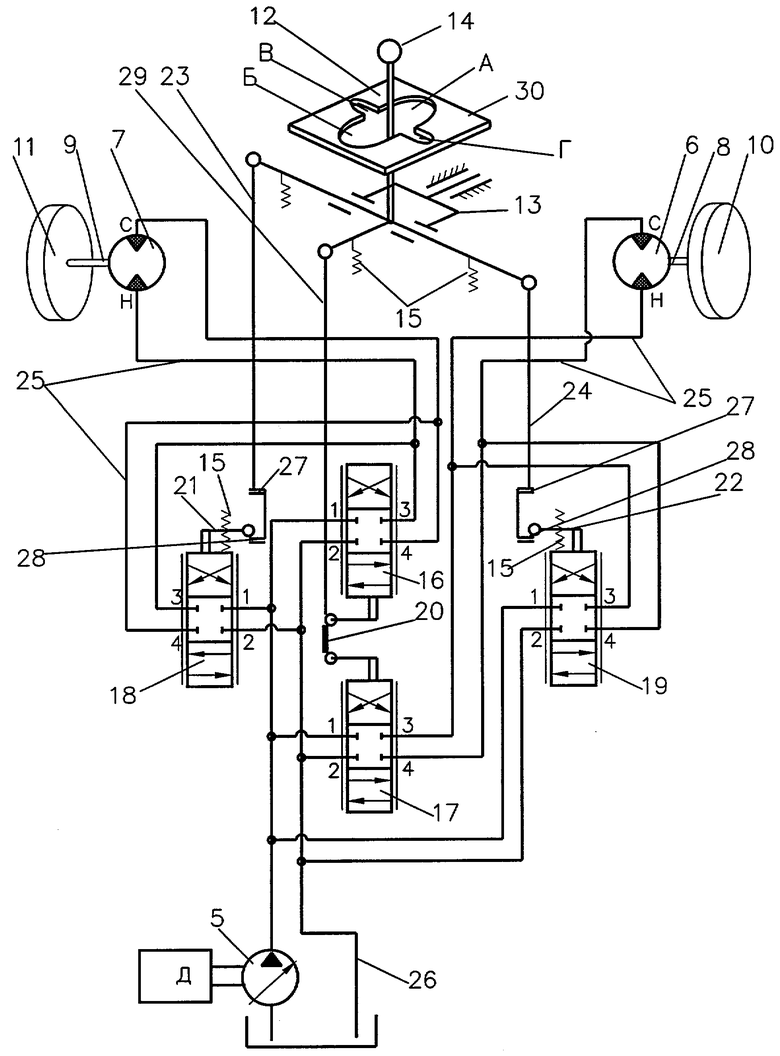
Система управления движением транспортного средства, содержащая источник давления рабочей жидкости, бустеры остановочных тормозов, реверсивные гидромоторы, соединенные валами с бортовыми движителями, орган управления движением, состоящий из шарнирно закрепленной рукоятки управления и тяг, средство гидрораспределения, на золотниках которого закреплены поводки, шарнирно соединенные с тягами органа управления движением, и гидравлически сообщающееся с источником давления, бустерами остановочных тормозов и с реверсивными гидромоторами, отличающаяся тем, что средство гидрораспределения выполнено в виде четырех трехпозиционных четырехлинейных гидрораспределителей, два из которых объединены стяжкой, соединяющей золотники этих гидрораспределителей с поводком, шарнирно соединенным с тягой органа управления движением, первые линии всех гидрораспределителей сообщены каналами между собой и с источником давления, вторые линии сообщены каналами между собой и со штуцером слива, третьи и четвертые линии одного из гидрораспределителей и одного из объединенных стяжкой гидрораспределителей сообщены каналами между собой и со штуцерами нагнетания и слива одного из реверсивных гидромоторов, третьи и четвертые линии другого гидрораспределителя и одного из объединенных стяжкой гидрораспределителей сообщены каналами между собой и со штуцерами нагнетания и слива другого реверсивного гидромотора, при этом тяги, взаимодействующие с поводками не объединенных стяжкой гидрораспределителей, снабжены регулируемыми упорами и выполнены с возможностью возвратно-поступательного перемещения относительно установленных посредством упругих элементов в нейтральное положение поводков этих гидрораспределителей, а величина перемещения рукоятки управления, снабженной избирателем направления перемещения, ограничена пазами этого избирателя таким образом, что поводок объединенных стяжкой гидрораспределителей имеет возможность перемещения на полный рабочий ход в обе стороны относительно своего нейтрального положения при обеспечении возможности одновременного перемещения поводка одного из не объединенных стяжкой гидрораспределителей на величину, ограниченную расстоянием между регулируемыми упорами тяги поводка другого гидрораспределителя, а величина перемещения поводков не объединенных стяжкой гидрораспределителей ограничена в пределах от их нейтрального положения до полного рабочего хода в одну сторону при одновременном перемещении поводка другого гидрораспределителя в пределах от его нейтрального положения до полного рабочего хода в другую сторону за вычетом расстояния между регулируемыми упорами тяги этого поводка и при одновременном блокировании перемещения поводка объединенных стяжкой гидрораспределителей.
| Устройство для управления гидрообъемной трансмиссией самоходной машины | 1978 |
|
SU766914A1 |
| Устройство управления гидростатическим приводом хода автодорожного шасси | 1988 |
|
SU1579803A1 |
| Устройство управления приводом транспортного средства | 1987 |
|
SU1439562A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ КОЛЕСНОГО ХОДА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2074290C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ГИДРОСТАТИЧЕСКОЙ | 0 |
|
SU281189A1 |
| JP 11005558 A, 12.01.1999. | |||

