Известны различные конструкции летательных аппаратов вертикального взлета с разнообразными средствами управления горизонтальным движением. В первоисходных конструкциях Леонардо да Винчи, модели Михаила Ломоносова, модели Понтон д'Амекура отражена лишь схема привода винтов, но не управления горизонтальным полетом. Созданные в 20-м веке аппараты вертикального взлета с винтовой тягой обладали однотипными средствами управления горизонтальным полетом - изменение угла атаки лопастей несущего винта и обтекаемые плоскости оперения (рули высоты, направления).
Отличительной особенностью вертолетов является осуществление горизонтального полета за счет изменения угла атаки несущего винта сложным механическим устройством. Это характерно и для аппаратов малой грузоподъемности, например, американского инженера Г.Пентекоста, в 1945 году разработавшего и построившего сверхлегкий вертолет "Хоппикоптер" ("Попрыгунчик") массой - 40 кг, Евгения Глухарева, датчанина К.Серемета, а также роботов-вертолетов.
Некоторые конгломераты вертолета-самолета разрабатывались в США, в 1950 году компаниями Lockheed и Convair. Созданы однотипные машины вертикального взлета соответственно Lockheed XFO, позднее обозначение было изменено на XFV-1 Salmon /"Лосось"/, и XFY-1 Pogo. Для этих машин предусматривалось как во время взлета, так и стоянок пребывание в вертикальном положении, стоя на крестообразном хвосте с амортизатором и колесиком на каждом из наконечников. Используемые здесь технические решения приняты в качестве прототипа предлагаемого изобретения. Так, например, с расположением фюзеляжа по вертикали.
В качестве двигателя летательного аппарата может использоваться роторно-поршневой (РПД). Отсутствие кривошипно-шатунного, газораспределительного механизмов и минимум движущихся деталей (все они - вращаются, отсутствует возвратно-поступательное движение) минимизируются участки возможных поломок, вибрации и источники шума и предоставляет возможность реализации выпуска наиболее дешевых двигателей.
РПД позволяет осуществлять большую частоту вращения вала от 7000 оборотов в минуту до 15000 и более. Такая частота вращения позволяет применять лопасти несущего винта в виде гибких лент-лезвий, устанавливающихся в рабочее положение благодаря действию центробежных сил. Большая частота вращения и выгодные соотношения топлива и воздуха в смеси обеспечивают получение большой мощности в единице объема цилиндра двигателя, что и дает сравнительно небольшие габариты и массу.
Канадская фирма Canadair разработала, например, вертолет-робот CL-227 с двигателем Ванкеля и турбовинтовой силовой установкой. Масса аппаратов составила 130 кг, скорость - 130 км/ч. Благодаря экономичным двигателям вертолеты обоих вариантов могли держаться в воздухе по 2÷3 часа.
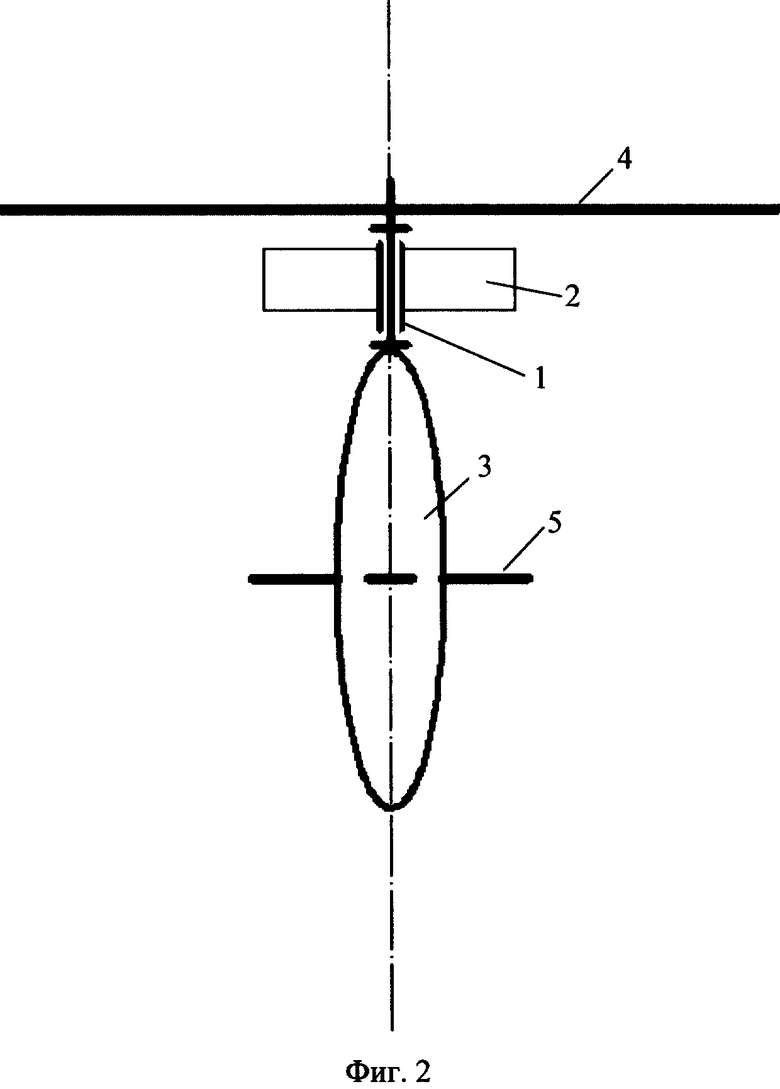
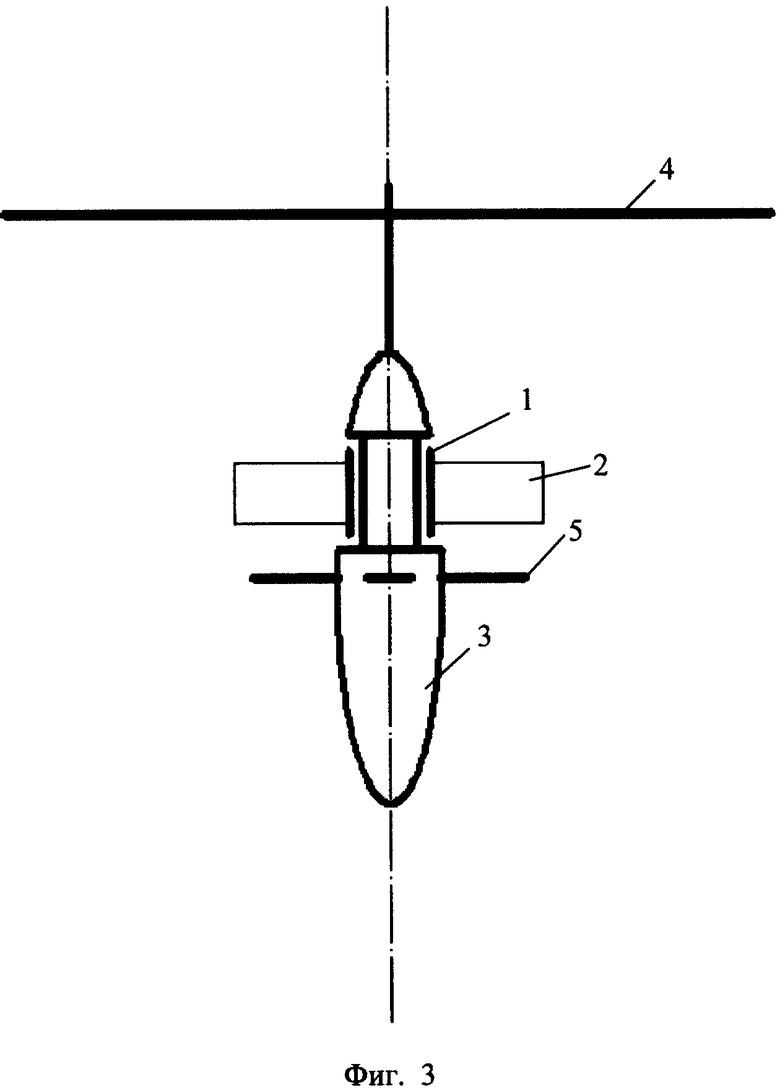
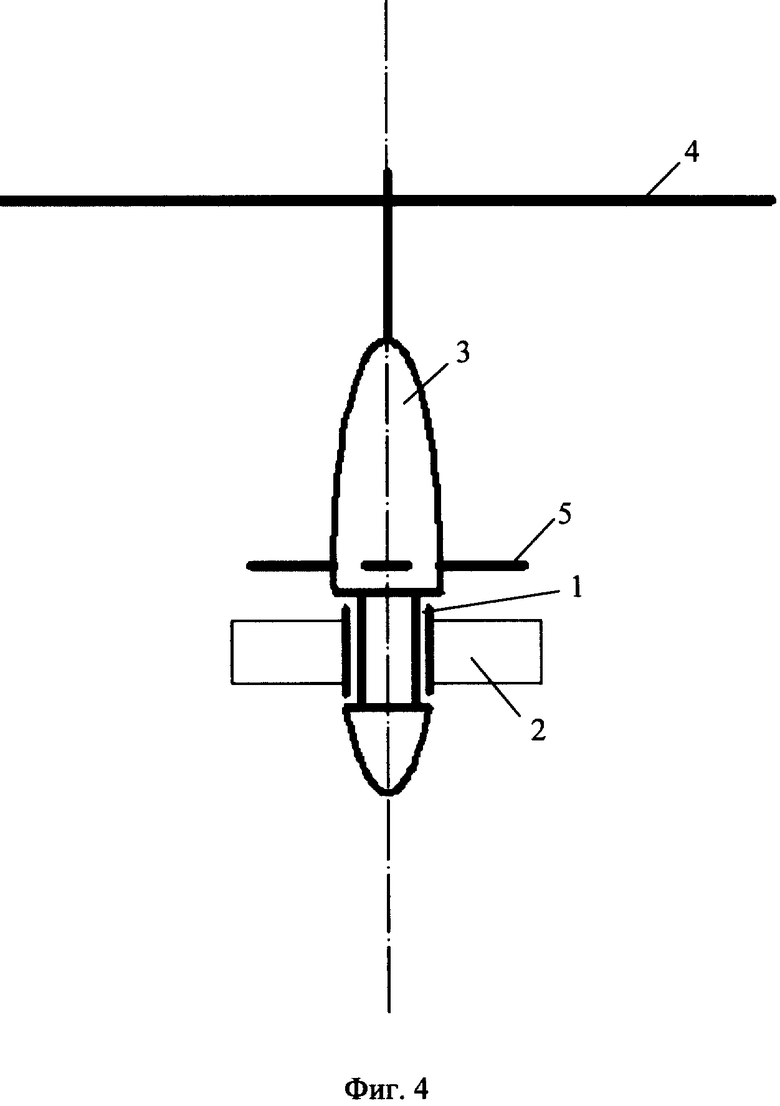
Применение РПД позволяет минимизировать поперечное сечение, а расположение их последовательно на одном валу равноценно превращению соответственно из 4-х цилиндрового в 8-ми, 16-ти, 32-х цилиндровый двигатель соответствующей повышенной мощности. Объединенный вал РПД вращается в одну сторону, увлекая основной несущий винт 4, а корпус 3 со вспомогательными лопастями 5 в другую. Вращающиеся в противоположную сторону лопасти могут компенсировать реактивный момент и в целом создают подъемную силу.
Оперение вертолета включает в себя обтекаемые плоскости 2 (фиг.1-8), поворачивающиеся вокруг осей, расположенных перпендикулярно к продольной оси аппарата.
Повороты обтекаемых плоскостей 2 вертикально поднимающегося аппарата позволяют плоскостям вращаться вдоль продольной оси в одну или противоположную сторону или прекращать это вращение. Такому движению способствует подшипник 1. Одновременный поворот плоскостей 2 в одну сторону создает усилие, которое осуществляет планируемое горизонтальное движение. Возможно и получение горизонтального усилия в центре тяжести без наклона летательного аппарата.
Обеспечение горизонтального движения из устойчивого вертикально-взвешенного полетного положения летательного аппарата поворотом обтекаемых плоскостей оперения, создающих горизонтальную силу, невозможно без подшипника между неподвижным оперением и вращающейся точкой крепления.
Наличие подшипника 1 в месте сопряжения оперения 2, включающее расположенные в нижней части фюзеляжа 6 вертолета обтекаемые плоскости, поворачивающиеся вокруг перпендикуляров к продольной оси вертолета, проходящей через "точку приложения подъемной силы + центра тяжести вертолета + точку крепления оперения к фюзеляжу". Для обеспечения горизонтального движения из устойчивого вертикально-взвешенного полетного положения в точке крепления оперения к фюзеляжу 6 расположен подшипник 1 таким образом, чтобы обеспечивать свободное вращение оперения вокруг продольной оси вертолета, а соответствующим поворотом обтекаемых плоскостей оперения препятствовать самопроизвольному, бесконтрольному вращению оперения вокруг продольной оси и создавать горизонтальную силу для горизонтального движения.
В описываемом аппарате шарнирное крепление оперения - это существенная деталь, отличающая его от реального прототипа XFY-1 Pogo (совершившего 5 ноября 1954 года демонстрационный полет, подтвердивший способность перехода от вертикального взлета к абсолютно горизонтальном полету на протяжении 70 метров).
Для описываемого летательного аппарата нет необходимости перевода фюзеляжа 6 в горизонтальное положение как для его прототипа - вертолета-самолета или вертолета классического вида. Такие летательные аппараты не предназначены для скоростных перелетов, а следовательно, и отсутствует необходимость уменьшения миделя поперечного сечения. Длительные поисковые работы с зависаниями и перемещениями на скоростях, сопоставимых со скоростью движения человека или обычного транспортного средства хозяйственного назначения (5÷60 км/час), - это основное назначение.
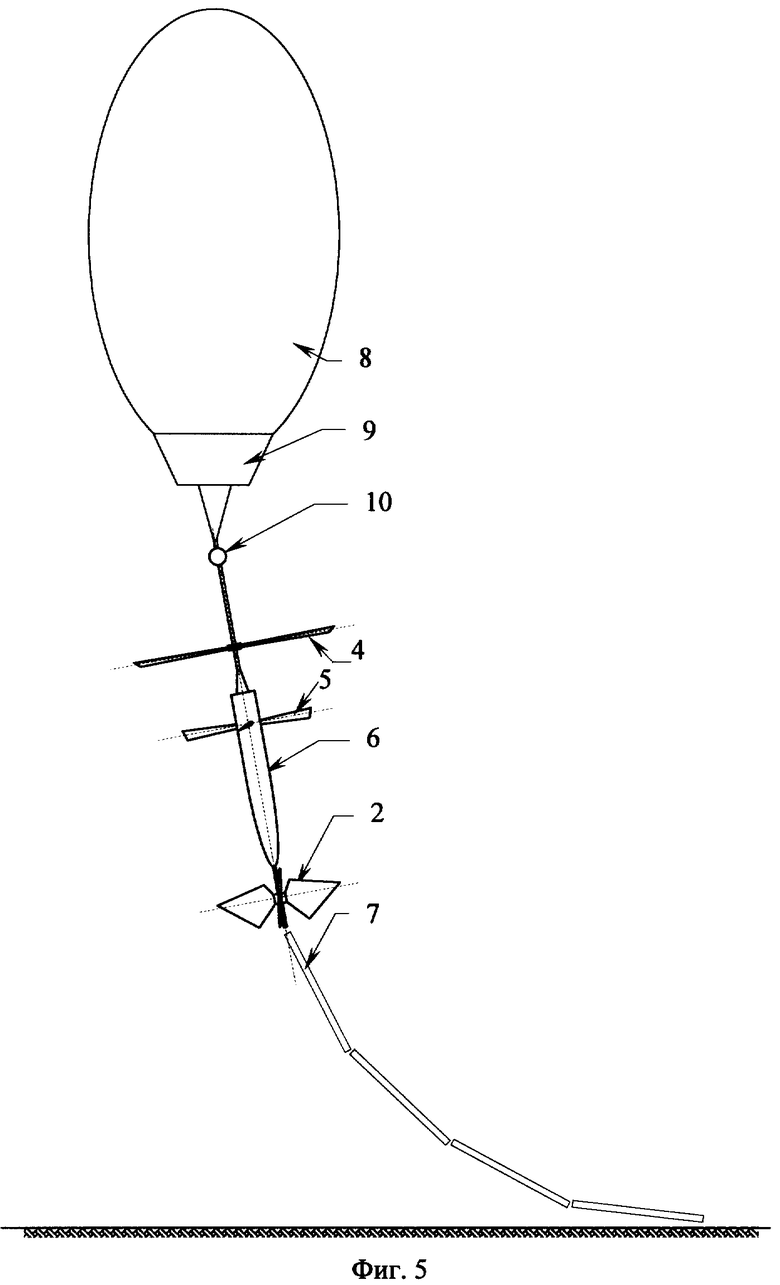
Шарнирное крепление оперения летательного аппарата позволяет перейти к различным компоновочным схемам, не присущим другим летательным аппаратам (фиг.5-7,): транспортная; основная.
Транспортная компоновочная схема (фиг.5 говорит сама за себя) использует основной компонент - тепловодородный шар 8 в единой наружной оболочке. Количество мелких водородных шаров в сумме может достигать нескольких десятков разнесенных по объему объединяющей их единой оболочки. Под общую оболочку нагнетается горячий газ от работающего РПД через выхлопную трубку, проходящую через кнехт 10 (фиг.5), при помощи фартука 9. Топливные баки-емкости 7 изготовлены локальными элементами из тонкостенного пленочного материала. Они подобны хвосту ящерицы - отстегиваются в процессе выработки топлива или в момент какой-либо непредвиденной ситуации.
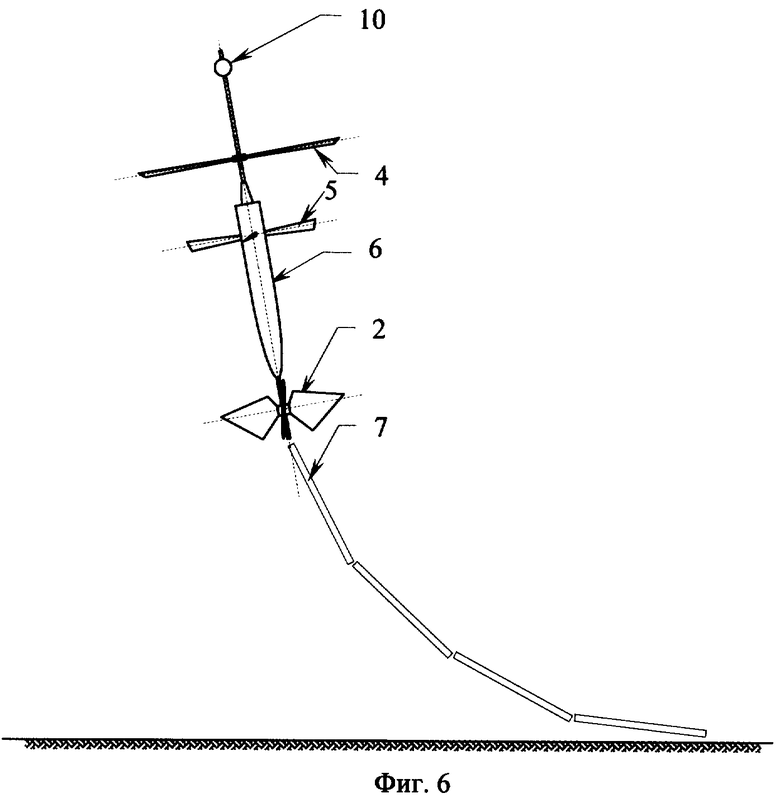
Основная компоновочная схема (фиг.6) предусматривает работу аппарата гарантированно в непосредственном контакте с грунтом, водой и передвигаться на достаточно протяженные расстояния в экономичном режиме барражирования. Ситуация аналогична касательному падению ракеты на поверхность после чего происходит зигзагообразное движение смертоносного объекта, полностью деморализующее противника.
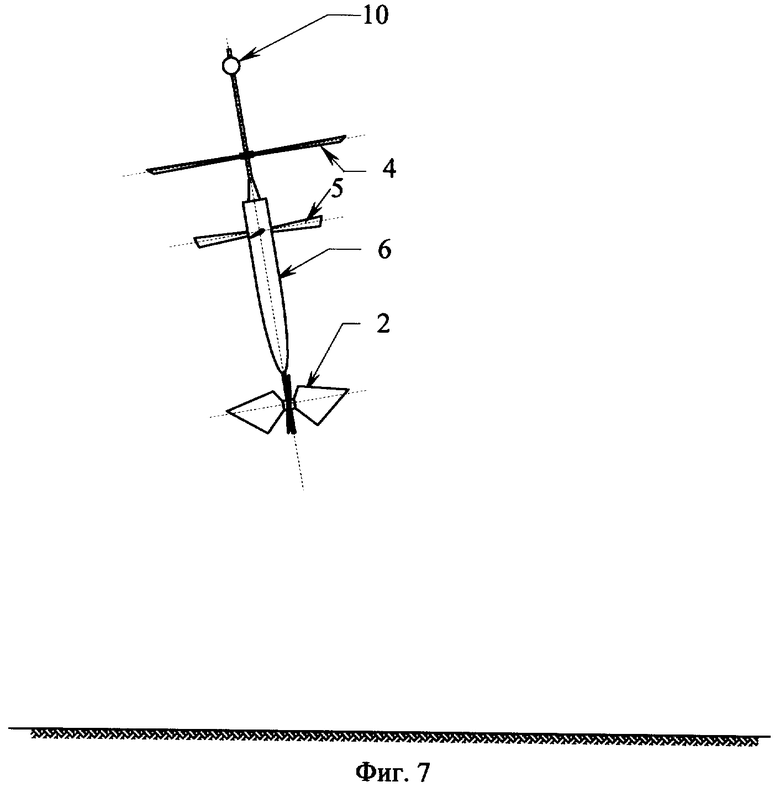
При применении рассматриваемого аппарата в боевых целях или после длительного передвижения применяется соответственно боевая-причальная компоновочная схема (фиг.7). Причем боевое движение аппарата возможно в режиме самолета-тарана, кнехтом вперед. Аппарат может вонзаться в цель острыми краями выхлопной трубки (возможен выстрел из трубчатого вала внутри выхлопной трубы). При контакте с биологической целью возможно нанесение повреждений быстро вращающимися лопастями-лезвиями или взрыва. Последняя процедура - это основное поражающее средство. В качестве взрывчатого вещества используется топливо. В процессе движения оно попадает в камеры сгорания и там взрывается, осуществляя работу двигателя, а при достижении цели остатки топлива выполняют основное свое предназначение.
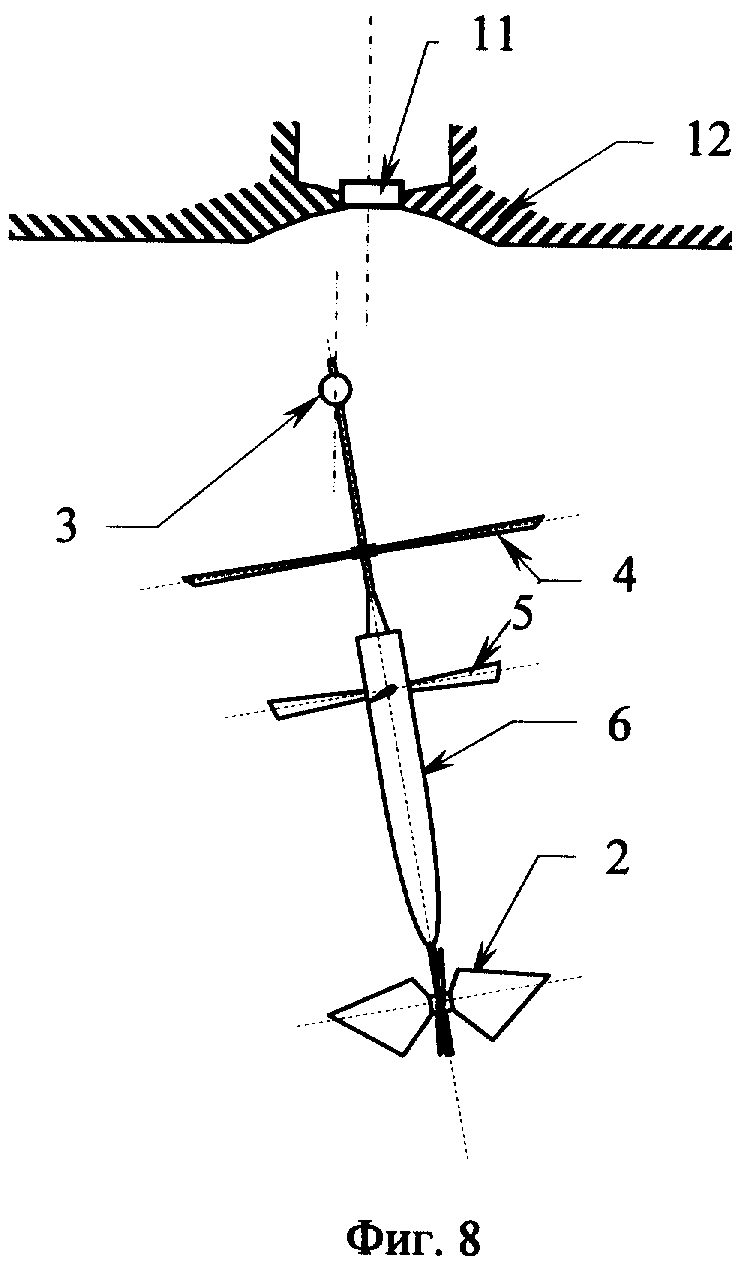
Причаливание к базе-"матке" 12 (фиг.8) при помощи захвата 11 осуществляется аппаратом при исчерпании ресурса по топливу или иным параметрам и невозможности в скором времени осуществления своего назначения - выполнения поставленной задачи. После пополнения боекомплекта, топлива и иных параметров аппарат отчаливает от базы-"матки" и процесс этот длится до команды отбоя, завершения всех ресурсов или гибели самого летательного аппарата.
Поиск цели осуществляется визуально с последующим распознаванием в бортовом или "маточном" компьютере с последующим режимом атаки, присущим только этой цели. Электронное оборудование располагается в обтекаемых плоскостях оперения, расположенных к противнику "ребром".
Масса летательного аппарата в боевой компоновке - от нескольких сотен грамм до нескольких килограмм и определяется экономическим показателем - не дороже оснащения, полной экипировки солдата и индивидуального боезапаса. Небольшие аппараты подобно саранче облепляют цель. Благодаря минимальной стоимости и сети баз-"маток" возможно обследование и контролирование большой территории.
Источники информации
- Цикл статей из журнала "Техника-молодежи" за 1982-1984: "Священный винт".
- Воздушная кавалерия; Поворотное крыло; "Малолитражки"; Вертолет в рюкзаке.
- Верхом на пропеллере; Винтокрылые роботы.
- http://www.vaz.ru/skbrpd/index.html - Официальная страничка СКБ РПД. Конструкция и принципы работы роторно-поршневого двигателя (РПД). Автомобили с роторно-поршневыми двигателями внутреннего сгорания.
- http://www.podrobnosti.ua - Микровертолеты - информация от 20 августа 2004, 1805. Автономный робот-вертолет (FR-II).
- http://www.rubrikon.ru/bse 1_asp - Большая Советская Энциклопедия: Д.Н.Вырубов, В.П.Алексеев о ДВС; Кулешов В.В.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1997 |
|
RU2132289C1 |
| СИСТЕМА ПОДВОДНАЯ РАЗВЕДЫВАТЕЛЬНО-УДАРНАЯ ТРАНСФОРМИРУЕМАЯ | 2019 |
|
RU2725567C1 |
Изобретение относится к авиации, а именно к оперению летательных аппаратов. Оперение включает расположенные в нижней части фюзеляжа вертолета обтекаемые плоскости, поворачивающиеся вокруг осей, расположенных перпендикулярно к продольной оси вертолета, проходящей через "точку приложения подъемной силы + центра тяжести вертолета + точку крепления оперения к фюзеляжу". Для обеспечения горизонтального движения из устойчивого вертикально-взвешенного полетного положения в точке крепления оперения к фюзеляжу расположен подшипник таким образом, чтобы обеспечивать свободное вращение оперения вокруг продольной оси вертолета. Соответствующий поворот обтекаемых плоскостей оперения должен препятствовать самопроизвольному, бесконтрольному вращению оперения вокруг продольной оси и создавать горизонтальную силу для горизонтального движения. Техническим результатом заявленного изобретения является повышение подъемной силы за счет компенсации реактивного момента. 8 ил.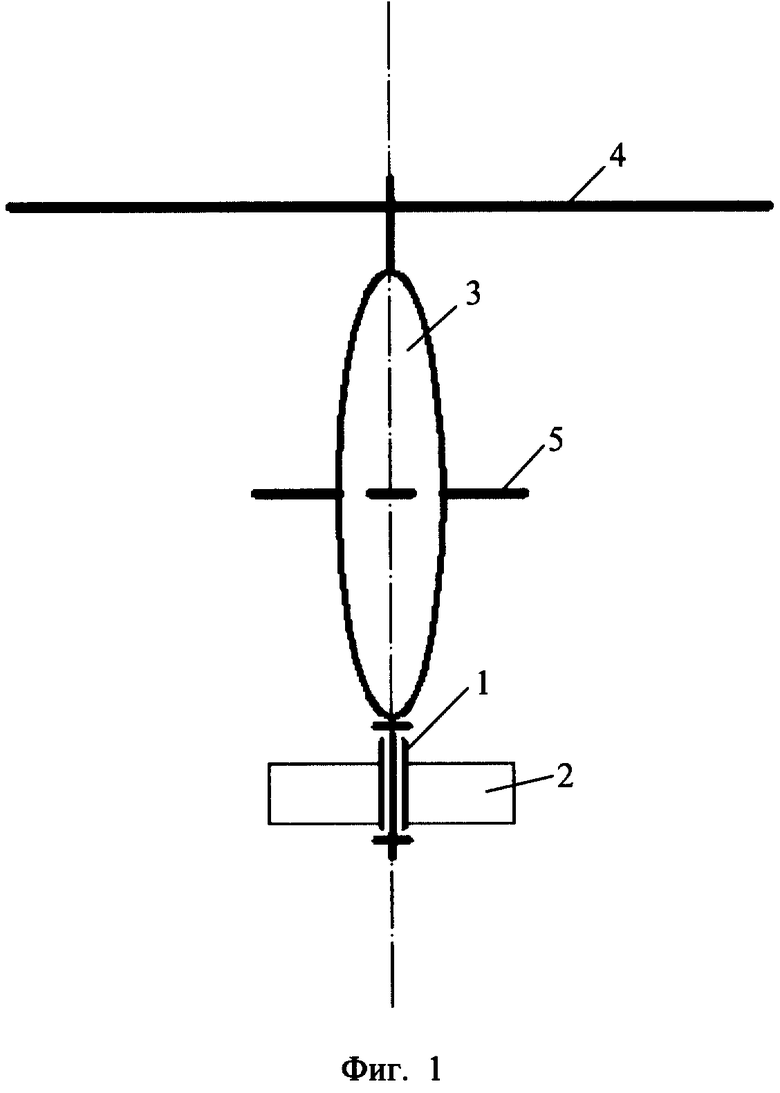
Оперение, включающее расположенные в нижней части фюзеляжа вертолета обтекаемые плоскости, поворачивающиеся вокруг перпендикуляров к продольной оси вертолета, проходящей через "точку приложения подъемной силы + центра тяжести вертолета + точку крепления оперения к фюзеляжу", отличающееся тем, что для обеспечения горизонтального движения из устойчивого вертикально-взвешенного полетного положения в точке крепления оперения к фюзеляжу расположен подшипник таким образом, чтобы обеспечивать свободное вращение оперения вокруг продольной оси вертолета, а соответствующим поворотом обтекаемых плоскостей оперения препятствовать самопроизвольному, бесконтрольному вращению оперения вокруг продольной оси и создавать горизонтальную силу для горизонтального движения.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И МЯГКОЙ ВЕРТИКАЛЬНОЙ ПОСАДКИ С ТЯГОЙ, МЕНЬШЕЙ ВЕСА | 1998 |
|
RU2152892C1 |
| WO 9812106, 26.03.1998 | |||
| Индикатор каплесодержания | 1987 |
|
SU1430857A1 |

