Настоящее изобретение относится к зевообразующему устройству и к ткацкому станку жаккардового типа с таким устройством.
В частности, оно относится к вертикальному приводу, в противофазе, двух наборов лезвий или ножей, которые в жаккардовом станке обеспечивают вертикальное смещение крючков ткацкой системы. В таком станке крючки, расположенные в рядах, попеременно поднимаются планками или лезвиями, обычно называемыми «ножами» или «планками», причем эти ножи или планки чаще всего поддерживаются одной или двумя рамами. Каждая рама должна приводиться в действие вертикальным колебательным перемещением в противофазе с другой рамой.
Из FR-A-2669650 известно, что для этих целей используется входной вал, приводимый в действие непрерывным вращательным перемещением, на котором установлены четыре эксцентрика, каждый из которых связан с шатуном (соединительным стержнем) для управления качающимся рычагом. Качающиеся рычаги установлены, двумя группами, на валы, имеющиеся на каждой стороне рамы. Эта кинематика относительно сложная и дорогая, и она к тому же чувствительна к регулировке, в частности из-за высокого числа сочленений, образованных в результате использования четырех эксцентриков и четырех управляющих рычагов. Кроме того, вспомогательные рамы или пластины должны быть добавлены на раме станка с целью опоры для входного вала с одной стороны, а с другой стороны для валов, на которых расположены качающиеся рычаги.
Более подробной целью изобретения является преодоление вышеуказанных недостатков предложением нового, упрощенного зевообразующего устройства, обладающего улучшенной надежностью и которое легче собирать и регулировать, чем ранее известные устройства.
В этой связи изобретение относится к зевообразующему механизму ткацкого станка жаккардового типа, в котором вертикальный привод двух наборов ножей осуществляется с одного входного вала, приводимого в действие непрерывным вращательным перемещением и расположенного между двух пластин, поддерживающих качающиеся валы, снабженные качающимися рычагами, кинематически связанными с набором ножей. Входной вал снабжен около каждой пластины средством для приведения в движения вышеупомянутых качающихся рычагов. Это устройство отличается тем, что качающиеся валы расположены параллельно, по меньшей мере, между пластинами и каждый из них соединен с входным валом одним рычагом и эксцентричным соединением, которое соответственно выполнено около каждой пластины.
Благодаря использованию качающихся валов, расположенных между поддерживающими пластинами, устройство согласно изобретению требует использования только двух рычагов и эксцентричных соединений, находящихся соответственно на каждой стороне ножей, то есть вблизи пластин, для того чтобы эффективно приводить в действие эти наборы ножей. Другими словами, качающиеся валы, которые расположены по всей длине ножей, передают приводную пару качающихся рычагов на обе стороны ножей, что делает возможным односторонний контроль двух качающихся рычагов, объединенных с каждым набором ножей на каждом качающемся валу.
Зевообразующее устройство, кроме того, может характеризоваться некоторыми из следующих признаков:
- качающиеся валы размещены сверху над наборами ножей,
- качающиеся валы по существу идентичны,
- входной вал и качающиеся валы поддерживаются подшипниками, установленными на пластинах.
В частности, нет необходимости выполнять масляные картеры, такие как иногда используются в устройствах, в состав которых входят кулачковые системы. Что касается кулачковых систем, рычаги и эксцентричные соединения делают возможным использование менее точной механической обработки, что дает преимущество с точки зрения себестоимости. Вышеупомянутые подшипники преимущественно состоят из смазывающих роликов.
- пластины по существу идентичны.
Входной вал выполнен с возможностью присоединения к ведущему валу на уровне каждого из его концов, что позволяет управлять устройством с одной или другой стороны, в зависимости от типа станка, на котором оно должно управляться.
Согласно возможным вариантам осуществления изобретения рычаги, соответственно относящиеся к двум соединениям устройства, могут быть как в одной, так и в противоположных фазах.
Изобретение также относится к ткацкому станку жаккардового типа с зевообразующим устройством, описанным здесь выше.
Изобретение будет более понятным и другие его преимущества станут очевидными после ознакомления с последующим описанием двух вариантов осуществления устройства и ткацкого станка в соответствии с принципами изобретения, показанных только в качестве примера со ссылками на сопроводительные чертежи, где
Фиг.1 - это вид в изометрии зевообразующего устройства согласно изобретению, установленного на ткацком станке согласно изобретению.
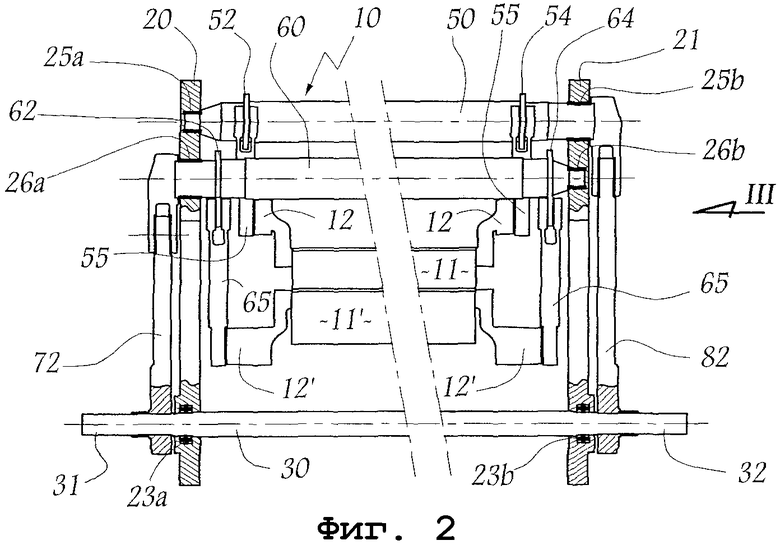
Фиг.2 схематически показывает устройство по фиг.1, вид сбоку с частичным разрезом на уровне подшипников.
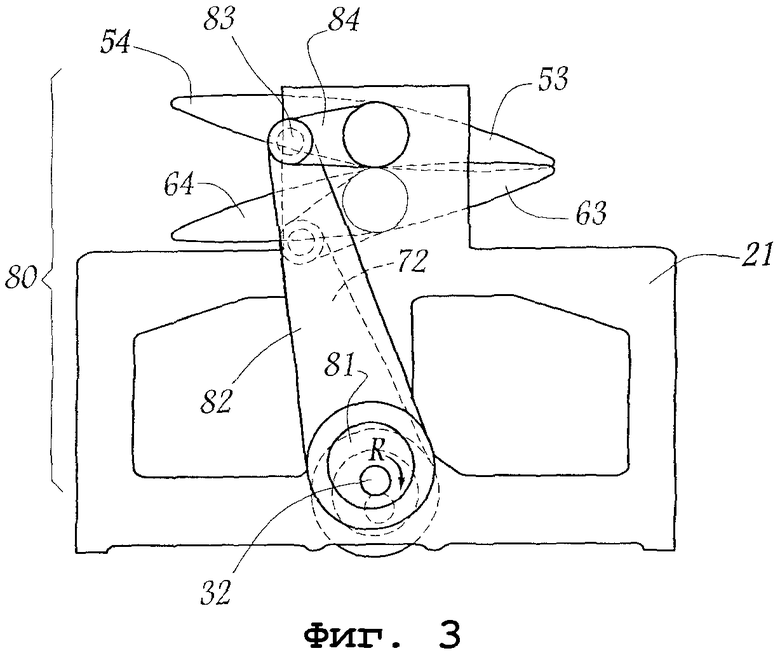
Фиг.3 - вид по направлению стрелки III на фиг.2,
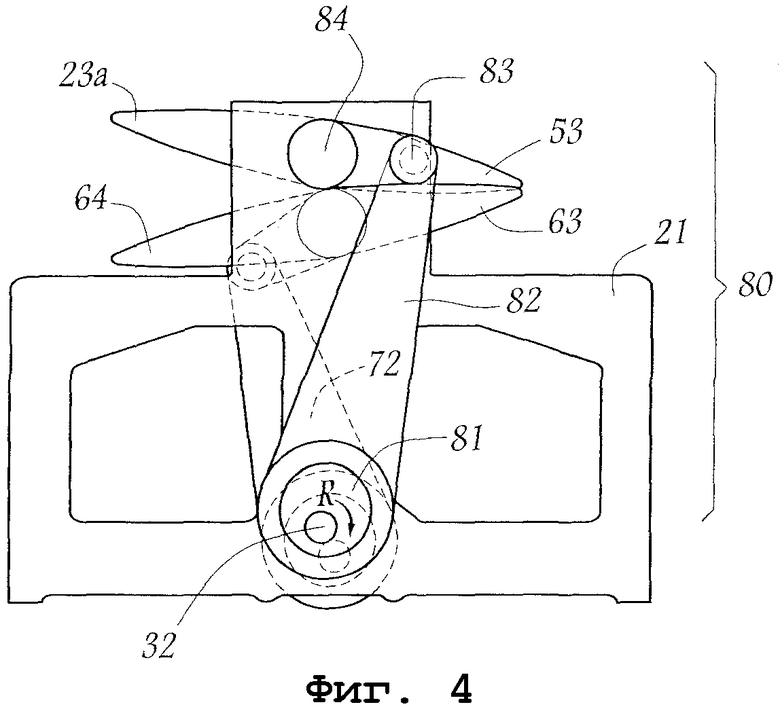
Фиг.4 - вид, идентичный виду по фиг.3, для устройства в соответствии со вторым вариантом осуществления изобретения.
Ткацкий станок М, показанный очень символично на фиг.1, снабжен зевообразующим устройством 10, которое содержит 2 набора ножей или лезвий.
Первый набор ножей 11 поддерживается двумя траверсами 12, которые формируют первую раму, в то время как второй набор ножей 11' поддерживается двумя другими траверсами 12', которые составляют вторую раму.
Ножи 11 и 11' предназначены для перемещения путем вертикального колебательного перемещения, представленного двойной стрелкой F1, что дает возможность перемещать крючки (не показано) между их соответствующими положениями в верхней и нижней мертвой точках, для того чтобы управлять перемещением галев ремизок 13, соединенных с крючком посредством ремизного жгута 14, что хорошо известно из области жаккардовых станков.
Траверсы рам 12 и 12' и ножи 11 и 11', объединенные вместе, установлены между двумя пластинами 20 и 21, предназначенными для соединения с рамой В.
Входной вал 30 расположен между пластинами 20 и 21 и выступает из них наружу. Он предназначен для кинематической связи на уровне одного из своих концов с приводным валом 40, представленным только осевой линией на фиг.1. Предусмотрено, что вал 30 соединен с валом 40 или на уровне его конца 31, видимого на фиг.1, или на уровне противоположного конца 32, по желанию, что делает возможным регулировку устройства 10 с одной или другой стороны в зависимости от функции используемого типа ткацкого станка М или от направления сборки устройства 10 на раме В.
Вал 30 приводится постоянным вращением по направлению стрелки R.
Вал 30 поддерживается подшипниками 23а и 23b, соответственно расположенными на пластинах 20 и 21. Эти подшипники преимущественно состоят из простых смазанных роликов.
Устройство 10 также включает два качающихся вала, а именно верхний качающийся вал 50 и нижний качающийся вал 60. Эти валы расположены один над другим, вал 50 находится над валом 60, и проходят параллельно друг другу над ножами и траверзами 11, 12, 11' и 12' и через пластины 20 и 21, на уровне которых они поддерживаются подшипниками 25а и 25b для вала 50, и 26а и 26b для вала 60 соответственно. Эти подшипники могут быть того же типа, что и 23a и 23b.
Вал 50 снабжен четырьмя качающимися рычагами 51, 52, 53 и 54, соединенными с траверсами 12 и 12' рычагами 55. Таким же образом вал 60 снабжен четырьмя качающимися рычагами, три из которых можно увидеть на фиг.1 со ссылочными номерами 62 и 64, которые присоединены к траверсам 12 и 12' рычагами 65.
Качающиеся рычаги 51, 62, 53 и 64 соединены с траверсами 12', тогда как остальные качающиеся рычаги соединены с траверсами 12.
Соединение 70 между валами 30 и 60 выполнено вблизи пластины 20, вне пространства, ограниченного пластинами 20 и 21. Это соединение содержит эксцентрик 71, установленный на валу 30. Шатун 72 (соединительный стержень) установлен вокруг эксцентрика 71 и приводится в действие вокруг штифта 73 на кривошипе 74, формирующем соединение с концом вала 60, который выступает за пластину 20.
Это одиночное соединение 70 дает возможность преобразовать постоянное вращательное перемещение вала 30 в качающееся перемещение вала 60 без необходимости использования кулачков или других механических устройств, требующих очень точной машинной обработки, и которые иногда нужно очень точно регулировать.
Перемещение, передающееся соединением 70 валу 60, само по себе передается качающимся рычагам, находящимся на этом валу, вблизи пластины 20, а также вблизи пластины 21, в результате чего нет необходимости обеспечивать кинематическое соединение между валами 30 и 60 вблизи пластины 21.
Кроме того, соединение 80 такого же типа, как и соединение 70, выполнено между валами 30 и 50 и также содержит эксцентрик 81, вокруг которого крепится шатун 82 (соединительный стержень), приводимый в действие вокруг штифта 83 на кривошипе 84, взаимодействующем с валом 50.
Как сказано выше, соединение 80 дает возможность передавать и преобразовывать постоянное вращательное перемещение вала 30 на качающиеся рычаги 51 и 54.
Каждый из этих качающихся рычагов снабжен щелевым отверстием 56 или 66, позволяющим регулировать положение рычагов 55 и 65 и, следовательно, образование зева на ткацком станке М.
Валы 50 и 60 одинаковые или по существу одинаковые, что дает возможность экономии при изготовлении устройства 10. Качающиеся рычаги, установленные на этих валах, также могут быть одинаковыми.
Подобным образом элементы, составляющие соединения 70 и 80, за исключением шатунов 72 и 82, могут быть одинаковыми.
Пластины 20 и 21 могут быть одинаковыми, так как через них проходят валы 30, 50 и 60. Это сходство повышает экономичность при массовом производстве устройства 10.
Как более подробно видно на фиг.3, шатуны 72 и 82 соединений 70 и 80 находятся в одной фазе.
Однако, как показано на фиг.4, эти шатуны могут также быть в противоположных фазах относительно вала 30, что является преимуществом для лучшей уравновешенности устройства 10, способствующей ограничению вибраций работающего станка.
Изобретение характеризуется довольно жесткой структурой соединения между ножами 11 и 11' c траверзами 12 и 12'. Конечно, это применимо к устройствам, в которых ножи подвешены на шатунах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЖАККАРДОВЫМ ЗЕВООБРАЗУЮЩИМ МЕХАНИЗМОМ ТКАЦКОГО СТАНКА С ВОЛНООБРАЗНО ПОДВИЖНЫМ ЗЕВОМ | 2000 |
|
RU2178471C1 |
| Ткацкий станок для изготовления тростниковой или тому подобной ткани | 1927 |
|
SU43612A1 |
| Ручной ткацкий станок для изготовления косынок | 1948 |
|
SU78801A1 |
| Ткацкий станок | 1981 |
|
SU1083652A1 |
| ТКАЦКИЙ СТАНОК, В ЧАСТНОСТИ ПНЕВМАТИЧЕСКИЙ БЕСЧЕЛНОЧНЫЙ ТКАЦКИЙ СТАНОК ДЛЯ ПРОИЗВОДСТВА АЖУРНОЙ ТКАНИ С ТКАНЫМ РИСУНКОМ | 2005 |
|
RU2339750C1 |
| Батаннай механизм ткацкого станка для выработки махровых тканей | 1980 |
|
SU1025334A3 |
| Сновально-ткацкий станок для тканья бесконечных приводных ремней | 1935 |
|
SU50111A1 |
| Ремизоподъемная каретка для ткацкого станка | 1978 |
|
SU739143A1 |
| Зевообразующее устройство ткацкого станка | 1982 |
|
SU1027301A1 |
| Петлеобразователь для ткацкого станка | 1989 |
|
SU1719481A1 |
Настоящее изобретение относится к текстильному машиностроению и касается зевообразующего устройства для ткацкого станка жаккардового типа. Переменный вертикальный привод двух наборов ножей осуществляется с одного входного вала, который приводится в действие непрерывным вращательным перемещением и расположен между двух пластин, которые поддерживают качающиеся валы, снабженные качающимися рычагами, кинематически связанными с наборами ножей. Вблизи каждой пластины входной вал снабжен средством для приведения в движение качающихся рычагов. Качающиеся валы расположены параллельно между пластинами, и каждый из них соединен с входным валом посредством единственного рычага и эксцентричного соединения. Соединения соответственно выполнены около каждой пластины. Изобретение обеспечивает создание упрощенного, более надежного зевообразующего устройства. 2 н. и 8 з.п. ф-лы, 4 ил.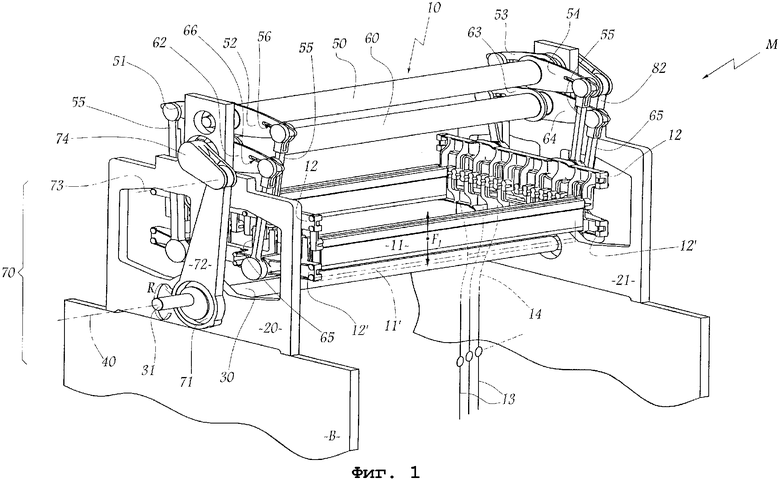
| СПОСОБ ГЕРМЕТИЗАЦИИ ЭКСПЛУАТАЦИОННОЙ КОЛОННЫ СКВАЖИНЫ | 2017 |
|
RU2669650C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФУТЕРОВКИ ТИГЛЯ ВАКУУМНОЙ ИНДУКЦИОННОЙ ПЕЧИ | 2022 |
|
RU2802219C1 |
| US 5513676 A1, 07.05.1996 | |||
| US 5671781 A1, 30.09.1997 | |||
| Устройство для скрепления листовшиХТОВАННОгО СЕРдЕчНиКА СТАТОРАэлЕКТРичЕСКОй МАшиНы | 1979 |
|
SU849384A1 |
| Устройство отбора подъемных крючков жаккардовой машины открытого зева | 1988 |
|
SU1584754A3 |

