Изобретение относится к подъемным кранам и может быть применено в системах управлений портальных кранов.
Известен способ изменения вылета стрелы портального крана путем преобразования вращения выходного вала электропривода механизма изменения вылета стрелы на прямолинейное перемещение зубчатой рейки с последующим преобразованием прямолинейного перемещения рейки на поворотное перемещение стрелы. При изменении вылета стрелы производят регулировку угла наклона грузового каната по отношению к оси стрелы посредством силового управляемого органа (а.с. №456781, кл. В66С 23/06, 1975 г.).
За прототип принят способ изменения вылета стрелы портального крана путем преобразования вращения выходного вала электропривода механизма изменения вылета стрелы на прямолинейное перемещение зубчатой рейки, с последующим преобразованием прямолинейного перемещения рейки на поворотное перемещение стрелы. Для изменения угла наклона стрелы на стойку, шарнирно связанную со стрелой, воздействуют регулятором положения стрелы (а.с. №1127841, кл. В66С 23/06, 1984 г.).
Недостатками известных технических решений являются значительные энергетические затраты электропривода механизма изменения вылета.
В основу изобретения поставлена задача путем изменений условий осуществления действий способа снизить энергопотребление крана.
Для достижения поставленной цели при использовании способа изменения вылета стрелы портального крана, путем преобразования вращения выходного вала электропривода механизма изменения вылета стрелы на прямолинейное перемещение зубчатой рейки с последующим преобразованием прямолинейного перемещения рейки на поворотное перемещение стрелы, согласно предложенному техническому решению, при достижении в рейке усилия, соответствующего 0,64-0,67 мощности потребляемой механизмом изменения вылета стрелы, снижают угловую скорость электропривода до достижения максимально допустимого усилия в рейке, после чего прекращают снижать угловую скорость электропривода.
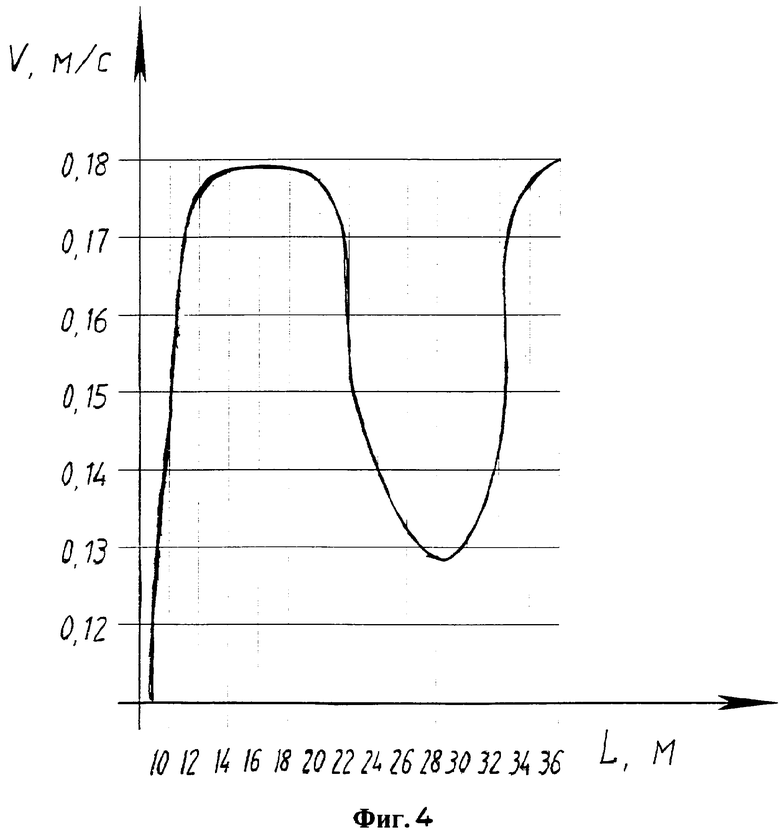
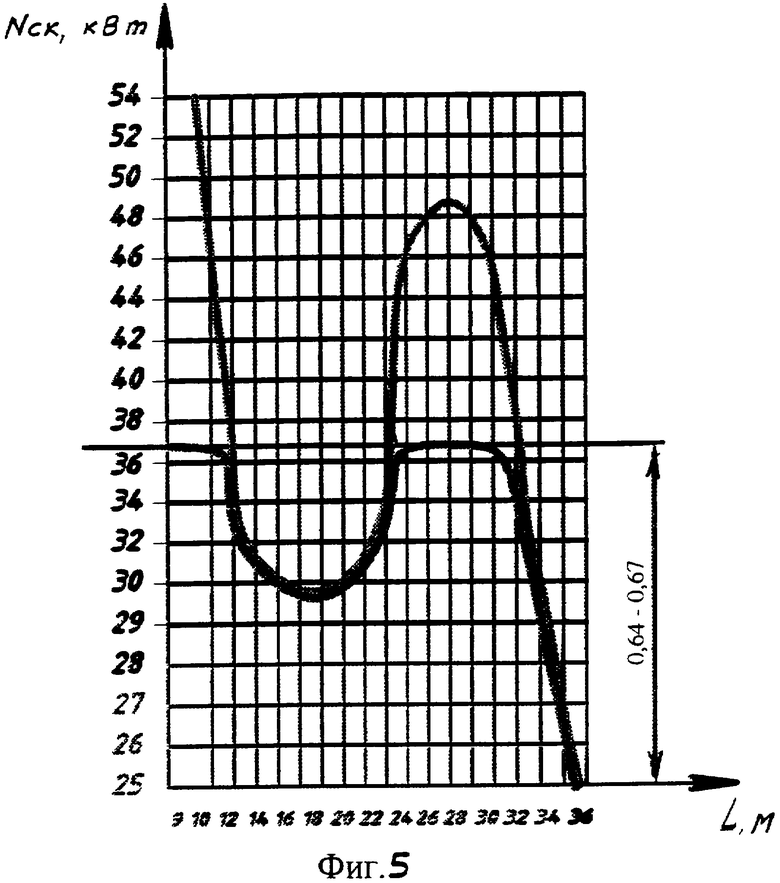
На фиг.1 представлена функциональная схема варианта устройства для реализации способа, на фиг.2 - схема силовых нагрузок к определению неуравновешенного момента, на фиг.3 - график зависимости усилия в рейке при движении от вылета стрелы, на фиг.4 - график зависимости скорости движения рейки от вылета стрелы, на фиг.5 - график зависимости мощности электропривода от изменения вылета стрелы.
Предложенный способ реализуется следующим образом.
Стрела 1 корнем шарнирно скреплена с колонной 2. Верхней частью стрела 1 шарнирно скреплена с хоботом 3. На передней части хобота 3 установлен грузовой блок 4. Хобот 3 шарнирно скреплен с оттяжкой 5. На месте стыка хобота 3 с оттяжкой 5 установлен грузовой блок 6. Грузовой канат 7 с грузозахватным органом 8, на котором размещен груз 9, огибает блоки 6, 7 и закреплен на барабане 10, взаимосвязанном с приводом 11 вертикального перемещения груза. Система уравновешивания собственного веса стрелы 1 содержит качающееся коромысло 12, противовес 13, взаимосвязанный посредством стреловой тяги 14 со стрелой 1. Стрела 1 посредством зубчатой рейки 15 взаимосвязана с выходным валом электропривода 16 механизма изменения вылета стрелы. Устройство содержит частотный преобразователь 17, программируемый командоконтроллер 18, датчик 19 изменения вылета стрелы 1.
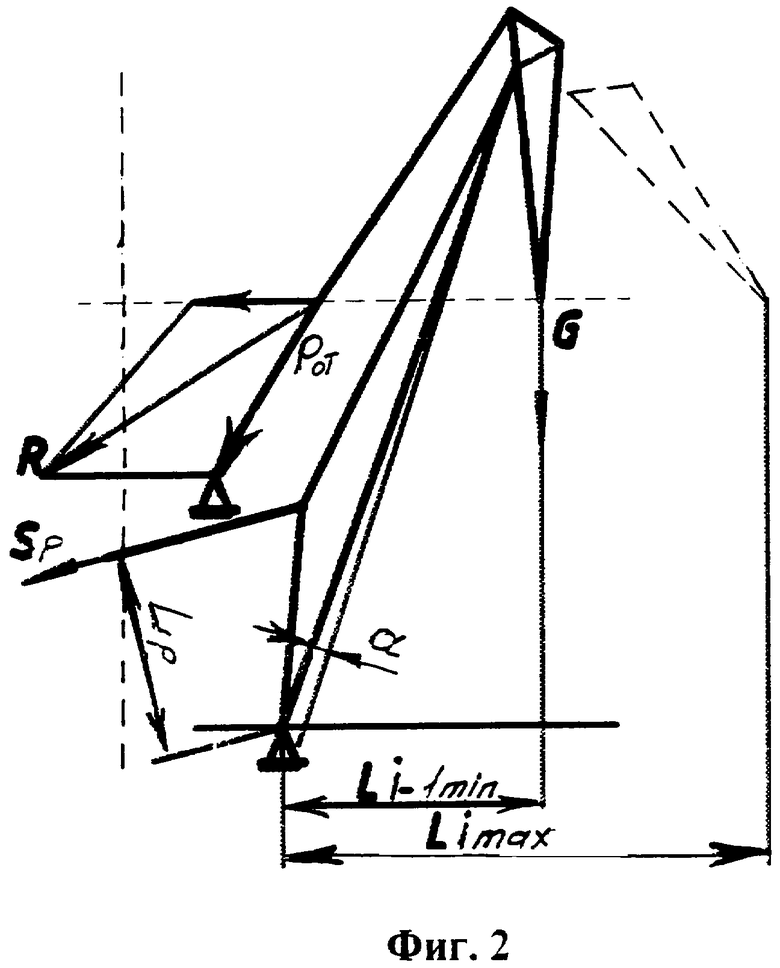
Груз 9 с грузозахватным органом 8 имеет вес G и создает в оттяжке 5 силу Рот. Результирующая сил G и Рот - сила R, которая приложена к верхнему шарниру стрелы 1 и создает относительно корня стрелы 1 грузовой момент Мха:
Мха=R×а, где
R - результирующая сила G и Рот;
а - плечо действия усилия в тяге противовеса, м.
Для перемещения груза 9 в сторону уменьшения вылета стрелы 1 создают электроприводом 16 механизма изменения вылета стрелы 1 силовой момент Мр:
Мр=Sp×Lp, где
Sp - усилие в рейке 15 механизма изменения вылета стрелы 1;
Lp - плечо действия силы Sp.
Величина усилия Sp в рейке 15 определяется:
Sp=S1+S2+S3+S4+S5+S6, где
S1 - усилие от неуравновешенного грузового момента (зависит от веса груза);
S2 - усилие от неуравновешенного момента стреловой системы (зависит от геометрических размеров звеньев укосины и изменяется по синусоидальной кривой);
S3 - усилие от сил трения в шарнирах стрелового устройства;
S4 - усилие от давления ветра на стреловую систему (зависит от типа шарниров укосин);
S5 - усилие от отклонения груза от вертикали (зависит от угла отклонения груза от вертикали и имеет зависимость от окружной скорости конца хобота);
S6 - усилие от сил инерции, возникающих при вращении крана и ускоренного движения ротора электродвигателя.
Суммарные усилия Sp на рейку 15 механизма изменения вылета для расчетных вылетов определены с помощью специально разработанных программных средств.
Момент при этом направлен против часовой стрелки и соответствует максимальному неуравновешенному моменту от собственного веса стрелы 1 и груза 9 с удовлетворением условия: Мха<Мр.
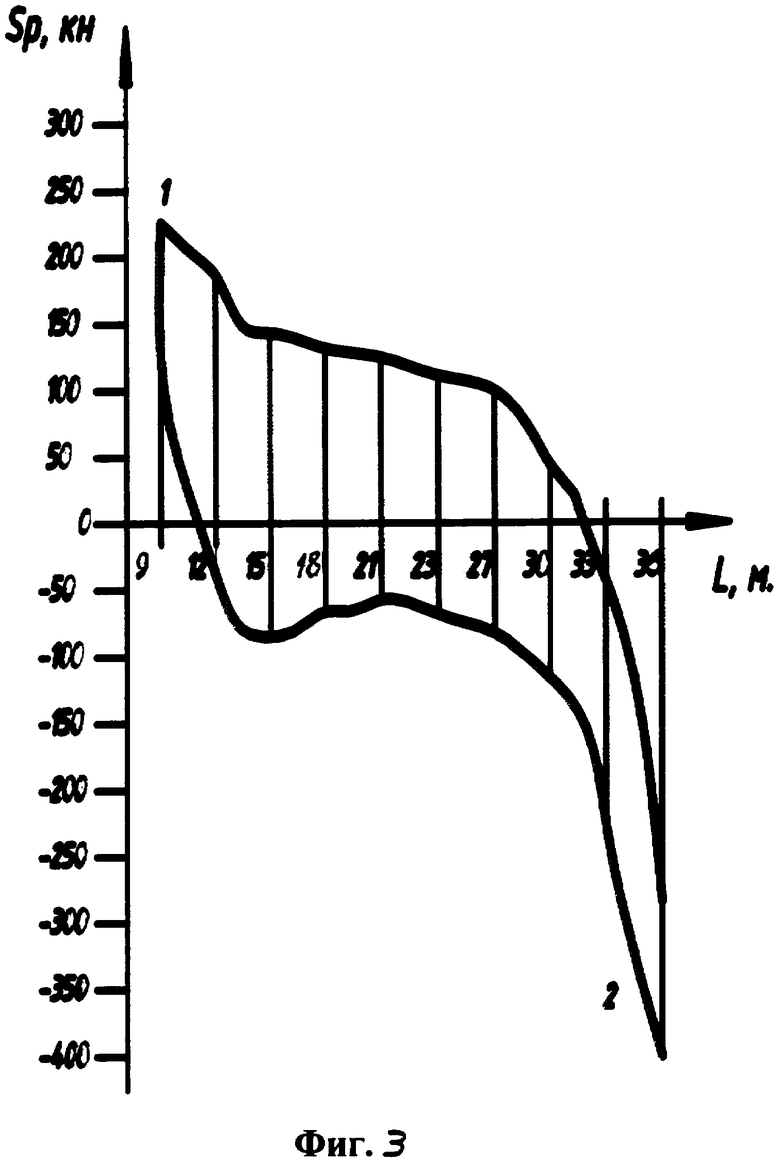
Строят график зависимости усилия в рейке Sp при движении стрелы от вылета Li-1min до вылета Li max и Li max до вылета Li-1min.
Из графиков статического усилия Sp в рейке 15 определяют величину вылета стрелы 1, на котором усилие в рейке 15 максимальное.
Строят график зависимости скорости V перемещения стрелы L при движении стрелы от вылета Li-1min до вылета Li max и от вылета Li max до вылета Li-1min.
По усилию Sp в рейке 15 при движении стрелы 1 от вылета Li-1min до вылета Li max и от вылета Li max до вылета Li-1min определяют потребляемую мощность N на этом участке. По полученным данным строят график потребляемой мощности N при движении от вылета Li-1min до вылета Li max и наоборот.
Номинальная мощность N выбранного электропривода 16 механизма изменения вылета должна быть больше или равна среднеквадратичной мощности Nск, определенной за цикл работы механизма:
 , где
, где
Sp.ск - среднеквадратичное усилие в рейке 15 за время цикла;
Vt - номинальная скорость рейки 15;
g - ускорение свободного падения;
η - общий к.п.д. механизма изменения вылета.
Общий к.п.д. механизма изменения вылета определяется как произведение к.п.д. привода и к.п.д. стрелового устройства:
η=ηпр×ηш, где
ηпр=0,83 - к.п.д. привода механизма изменения вылета,
ηш=0,92 - к.п.д. шарниров стрелового устройства.
Среднеквадратичное усилие Sр.ск в рейке 15 определяют по формуле:
 , где
, где
Scpi - среднеквадратичное усилие в рейке 15 при движении стрелы 1 от вылета Li-1min до вылета Li max и наоборот;
Δti - время движения от вылета Li-1min до вылета Li max и наоборот.
По величине вылета стрелы 1 определяют усилие Sicp в рейке 15, которое соответствует потреблению механизмом изменения вылета стрелы 1 мощности N=(0,64-0,67)Nmax.
Величина вылета стрелы 1 определяется датчиком 19 вылета стрелы 1. Сигнал от датчика 19 вылета стрелы 1 поступает в программируемый командоконтроллер 18. Сигнал от программируемого командоконтроллера 18 подается на частотный преобразователь 17. Частотный преобразователь 17 автоматически снижает скорость электропривода 16 механизма изменения вылета стрелы 1 и поддерживает постоянную мощность, при этом скорость движения рейки 15 уменьшается. Таким образом, срезают и сглаживают пики максимума мощности, потребляемой механизмом изменения вылета стрелы 1. Далее датчик 19 фиксирует расчетную величину вылета стрелы 1 при превышении усилия в рейке 15 значения Si max. Через передачу сигналов от датчика 19 на командоконтроллер 18 и от командоконтроллера 18 на преобразователь 17 угловую скорость электропривода 16 прекращают снижать и скорость V движения рейки 15 становится постоянной.
При уменьшении значения Si max частотный преобразователь 17 автоматически увеличивает угловую скорость электропривода 16 и поддерживает постоянную мощность, скорость V движения рейки 15 увеличивается.
Реализация предложенного способа обеспечивает уменьшение энергопотребления портального крана за счет уменьшения мощности электропривода 16 механизма изменения вылета стрелы, за счет ликвидации дополнительного привода механизма регулирования положения стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛОВОЕ УСТРОЙСТВО ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2095305C1 |
| Шарнирно-сочлененная укосина портального крана | 1971 |
|
SU456781A1 |
| Шарнирно-сочлененное стреловое устройство (его варианты) | 1982 |
|
SU1129177A1 |
| Способ перемещения груза двумя кранами | 1981 |
|
SU998314A1 |
| Шарнирно-сочлененная укосина грузоподъемного крана | 1967 |
|
SU524761A1 |
| ШАРНИРНО СОЧЛЕНЕННАЯ УКОСИНА | 1973 |
|
SU404758A1 |
| Портальный кран | 1979 |
|
SU893828A1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| Шарнирно-сочлененная укосина портального крана | 1971 |
|
SU461890A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2049038C1 |
Изобретение относится к подъемным кранам и может быть применено в системах управлений портальных кранов. Изменение вылета стрелы портального крана заключается в преобразовании вращения выходного вала электропривода механизма изменения вылета стрелы на прямолинейное перемещение рейки и на поворотное перемещение стрелы. При достижении в рейке усилия, соответствующего 0,64-0,67 мощности потребляемой механизмом изменения вылета стрелы, снижают угловую скорость электропривода до достижения максимально допустимого усилия в рейке, после чего прекращают снижать угловую скорость электропривода. Обеспечивается уменьшение энергопотребления портального крана за счет уменьшения мощности электропривода механизма регулирования положения стрелы. 5 ил.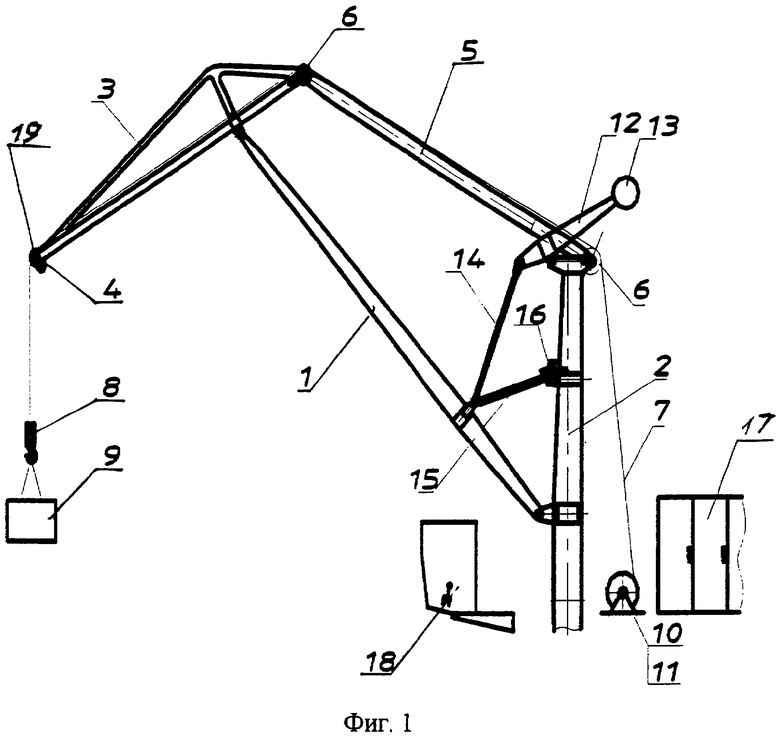
Способ изменения вылета стрелы портального крана путем преобразования вращения выходного вала электропривода механизма изменения вылета стрелы на прямолинейное перемещение зубчатой рейки с последующим преобразованием прямолинейного перемещения рейки на поворотное перемещение стрелы, отличающийся тем, что при достижении в рейке усилия, соответствующего 0,64-0,67 мощности потребляемой механизмом изменения вылета стрелы, снижают угловую скорость электропривода до достижения максимально допустимого усилия в рейке, после чего прекращают снижать угловую скорость электропривода.
| Шарнирно-сочлененная укосина портального крана | 1982 |
|
SU1127841A1 |
| Приспособление для приведения в движение коромысла углеподъемного крана-журавля | 1928 |
|
SU13463A1 |
| Ограничитель грузоподъемности стрелового крана | 1981 |
|
SU992407A1 |
| GB 624500 A, 09.06.1949. | |||

