Изобретение относится к способам борьбы с помехами, используемыми в обработке радиолокационной информации, в частности в аппаратуре первичной обработки радиолокационной информации.
Изобретение направлено на обнаружение тех частей радиолокационного пространства, которые поражены помехами.
Известен способ подавления радиолокационных помех, называемый селекцией движущихся целей (СДЦ). Недостаток этого способа состоит в том, что он зачастую не охватывает все радиолокационное пространство. Неохваченные области пространства могут быть поражены помехой и потому быть источником ложных тревог при обработке радиолокационной информации.
Наиболее близким является способ с устройством обнаружения радиолокационных помех [1], состоящий в следующем.
Видеоимпульсы с выхода радиолокационного приемника подвергают двоичному амплитудно-временному квантованию.
Вся рабочая дальность разбивается на элементарные участки - ячейки, временной интервал которых соответствует полосе радиолокационного приемника и потому обычно равен длительности зондирующего импульса.
Обозначим число ячеек в течение одного зондирования как N.
Обозначим число зондирований за время одного обзора как М.
Таким образом, все радиолокационное пространство состоит из N·M ячеек.
Анализ радиолокационного пространства на наличие или отсутствия помехи проводится следующим образом.
Все радиолокационное пространство разделяют на азимутально-дальностные участки.
Каждый азимутально-дальностной участок содержит 2·n ячеек по дальности в 2·n соседних зондированиях, т.е. количество ячеек в одном участке равно 4·n·m.
Число видеоимпульсов в данном азимутально-дальностном участке, превращенных благодаря двоично-временному квантованию в двоичную единицу («1»), лежит в пределах от нуля до 4·n·m.
Если в данном азимутально-дальностном участке количество двоичных единиц больше заданного порогового значения, то данный азимутально-дальностной участок считается пораженным помехой. В качестве порога принимается определенная часть максимального значения, равного 4·n·m, т.е. пороговое значение выражается как ближайшее целое величины b·4·n·m, где b<1.
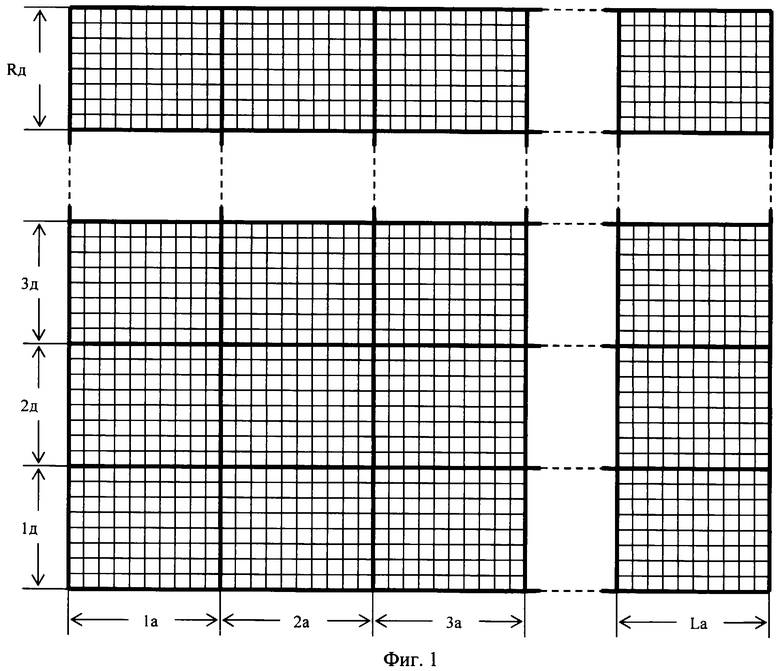
На фиг.1 показано радиолокационное пространство, разделенное на азимутально-дальностные участки. Каждый азимутально-дальностной участок характеризуется его координатой в радиолокационном пространстве следующим образом. Координата по дальности - это номер участка по дальности, начиная от нулевой дальности: 1д, 2д и т.д. до последнего участка Rд. Координата по оси азимута - это номер азимутального сектора, начиная от нулевого азимута: 1а, 2а и т.д. до последнего La.
С началом каждого нового оборота радиолокационной антенны начинается анализ помеховой обстановки нового радиолокационного обзора.
Будем считать, что новый обзор начинается с приходом первого импульса запуска после прихода импульса «Север».
С этого импульса запуска начинается первый азимутальный сектор, обозначенный как 1а. Второй азимутальный сектор начинается через 2·m импульсов запуска, т.е. с 2·m+1-го импульса запуска и т.д.
В каждом азимутальном секторе располагаются дальностные участки, начиная с 1д по Rд
Анализ помеховой обстановки, т.е. подсчет количества двоичных единиц в азимутально-дальностном участке и сравнении подсчитанного значения с порогом начинается в первом азимутальном секторе с 1-го азимутально-дальностного участка, который определяется координатами 1_д, 1_а. Далее переходят к анализу 2-го азимутально-дальностного участка, который определяется координатами 2_д, 1_а и так далее до последнего азимутально-дальностного участка в первом азимутальном секторе, обозначенного как R_д, 1а.
Затем переходят ко второму азимутальному сектору.
Во втором азимутальном секторе анализ также начинается с 1-го азимутально-дальностного участка, который определяется координатами 1_д, 2_а. Затем переходят к анализу 2-го азимутально-дальностного участка, который определяется координатами 2_д, 2_а и так далее до последнего азимутально-дальностного участка во втором азимутальном секторе, обозначенного как R_д, 2_а.
Таким образом, проходят все радиолокационное пространство вплоть до последнего азимутального сектора L_a.
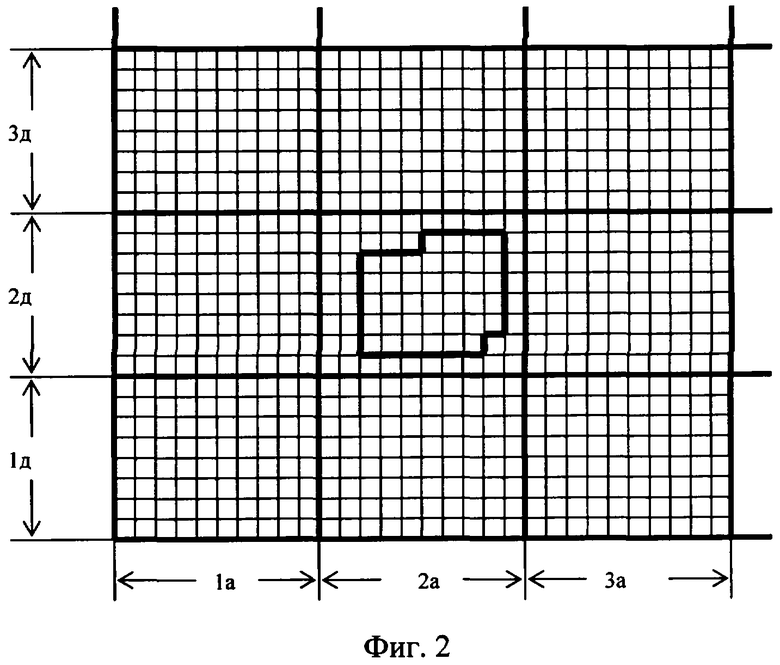
Помеха может расположиться по отношению к азимутально-дальностным участкам различным образом.
Помеха может полностью попасть в данный азимутально-дальностный участок. Такой случай представлен на фиг.2. На фиг.2 в участке с координатами 2_д, 2_а изображена помеха в виде фигуры неправильной формы. Будем считать, что помеха занимает площадь участка, превышающую пороговое значение. Т.е. число двоичных единиц в данном азимутально-дальностном участке больше величины b·4·n·m, где b<1. Следовательно, данный участок поражен помехой.
Таким образом, согласно прототипу, способ обнаружения радиолокационных помех состоит в том, что проводят двоично-временное квантование радиолокационной информации, подсчитывают количество двоичных «единиц» в каждом азимутально-дальностном участке размером 4·n·m ячеек радиолокационного пространства, состоящем из 2n элементарных ячеек по дальности в 2m соседних зондированиях по азимуту, сравнивают подсчитанное в каждом азимутально-дальностном участке количество двоичных «единиц» с порогом, равным 4·n·m·b, где b<1, объявляют азимутально-дальностной участок, в котором превышен порог, пораженным помехой. Недостаток прототипа заключается в следующем.
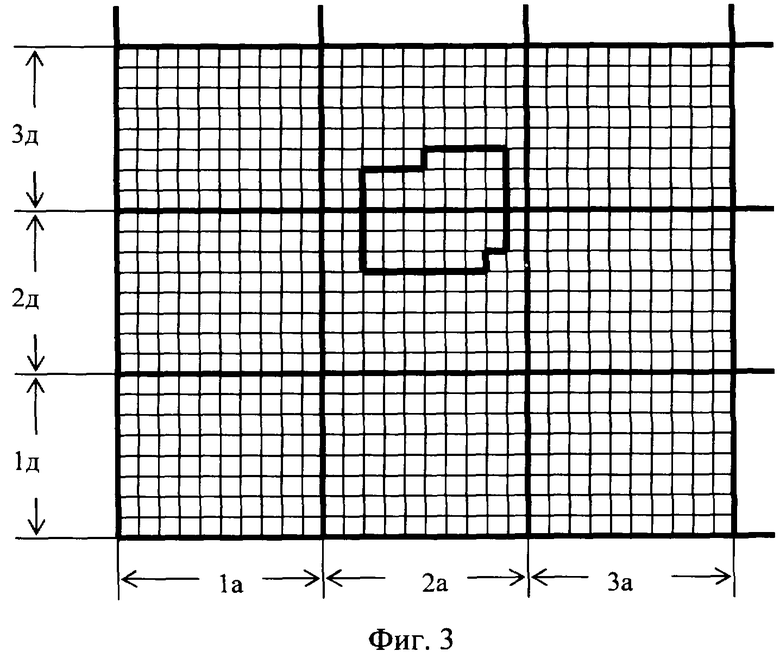
Помеха может расположиться так, что одна часть ее попадет в k-й участок по дальности, а вторая часть - в соседний по дальности k+1-й участок одного и того же азимутального сектора. На фиг.3 такими участками являются 2_д и 3_д в азимутальном секторе 2_а. Тогда помеха не обнаружится ни в том, ни в другом участке.
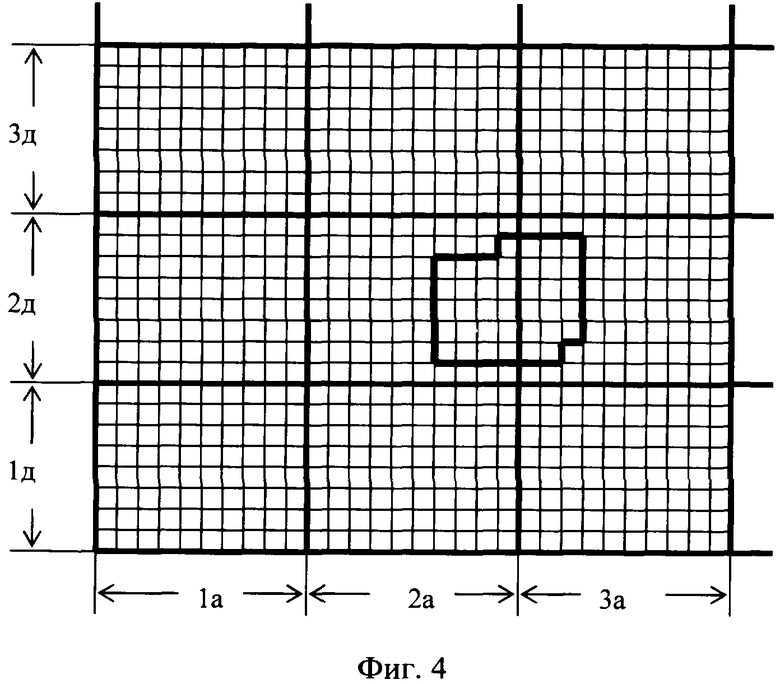
Помеха может расположиться так, что одна часть ее попадет в k-й участок по дальности одного азимутального сектора, а вторая часть - в k-й участок по дальности соседнего азимутального сектора. На фиг.4 такими участками являются участки с координатой по дальности 2_д в азимутальных секторах 2_а и 3_а. Тогда помеха и в этом случае не обнаружится ни в том, ни в другом участке.
Помеха может расположиться в четырех соседних участках: в двух соседних по дальности участках данного азимутального сектора и в двух соседних по дальности участках соседнего азимутального сектора. На фиг.5 такими участками являются участки с координатами по дальности 2_д и 3_д и по азимуту 2_а, 3_а. И в этом случае помеха не обнаружится ни в одном из участков.
Цель предлагаемого способа состоит в увеличении вероятности обнаружения помехи.
Эта цель достигается благодаря тому, что анализ радиолокационного пространства на наличие в нем помехи проводится движением в этом пространстве с «шагом», равным половине азимутально-дальностного участка как по дальности, так и по азимуту. При этом площадь исследуемого участка остается постоянной, всегда равной площади азимутально-дальностного участка, т.е. состоит из 4·n·m ячеек.
На фиг.6 показано радиолокационное пространство, разделенное на азимутально-дальностные участки, причем переход от одного к другому в пределах каждого азимутального сектора проходит с «шагом», равным половине участка по дальности, т.е. равным n ячеек по дальности. Переход от одного азимутального сектора к другому проходит с «шагом», равным половине азимутального сектора, т.е. равным m импульсам запуска.
Сначала анализируется первый азимутально-дальностной участок с координатами 1_д и 1_а, затем второй азимутально-дальностной участок с координатами 2_д и 1_а. Из фиг.6 видно, что второй анализируемый азимутально-дальностной участок сдвинут по отношению к первому азимутально-дальностному участку на половину размера участка по дальности, т.е. на n ячеек по дальности. Третий анализируемый азимутально-дальностной участок с координатами 3_д и 1_а сдвинут по дальности еще на n ячеек по дальности. Заметим, что это тот азимутально-дальностной участок, который в прототипе был вторым по счету и имел координаты 2_д и 1_а. После анализа последнего азимутально-дальностного участка первого азимутального сектора, т.е. участка с координатами 2R-1_д, анализ участков в первом азимутальном секторе закончится. Затем анализируются азимутально-дальностные участки со сдвигом по азимуту на m азимутальных позиций, т.е. со сдвигом на половину азимутального сектора. Т.е. теперь анализируются азимутально-дальностные участки начиная с азимутально-дальностного участка с координатами 1_д, 2_а по азимутально-дальностной участок с координатами 2R-1_д, 2_а.
Таким образом, после окончания анализа участков вдоль всей дальности проводится сдвиг по азимуту на m азимутальных позиций и начинается новый анализ участков вдоль всей дальности.
В этом случае вероятность нахождения азимутально-дальностного участка радиолокационного пространства, пораженного помехой, возрастает. Это иллюстрируется фиг.7, из которой видно, что помеха полностью расположена в участке с координатами 4_d, 2_а, Поэтому эта помеха будет обнаружена благодаря тому, что анализ помеховой обстановки в пространстве происходит с шагом, равным половине азимутально-дальностного участка по дальности и половине азимутально-дальностного участка по азимуту.
Таким образом, фиг.7 показывает, что предложенный способ позволяет обнаружить помеху в том случае, когда прототип с этим не справляется. Эта помеха не могла быть обнаружена в прототипе, что иллюстрируется фиг.5.
Таким образом, предлагаемый способ обнаружения радиолокационных помех состоит в том, что проводят двоично-временное квантование радиолокационной информации, подсчитывают количество двоичных «единиц» в азимутально-дальностном участке размером 4·n·m ячеек радиолокационного пространства, состоящем из 2п элементарных ячеек по дальности в 2m соседних зондированиях по азимуту, сравнивают подсчитанное количество двоичных «единиц» с порогом, равным 4·n·m·b, где b<1, объявляют азимутально-дальностной участок, в котором превышен порог, пораженным помехой, причем переход от одного азимутально-дальностного участка размером 4·n·m ячеек к следующему азимутально-дальностному участку размером 4·n·m ячеек проводят с «шагом», равным половине азимутально-дальностного участка по дальности, т.е. n ячеек в пределах данного азимутального сектора и с «шагом», равным половине азимутально-дальностного участка по азимуту, т.е. m зондирований при сдвиге по азимуту.
Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается наличием новых операций.
Таким образом, заявляемый способ соответствует критерию «новизна».
Предлагаемый способ при введении новых вышеуказанных операций совместно с операциями прототипа приобретает отличие, реализующее новое качество, позволяющее увеличить вероятность обнаружения помехи за счет того, что при анализе помеховой обстановки переход от одного азимутально-дальностного участка размером 4·n·m ячеек к другому азимутально-дальностному участку проходит
- по дальности с «шагом» n ячеек, т.е. равным половине интервала по дальности;
- по азимуту с «шагом» m ячеек, т.е. равным половине интервала по азимуту.
Из этого можно сделать вывод о соответствии технического решения критерию «изобретательский уровень».
Источники информации
1. Автоматизированные системы управления воздушным движением: Справочник. Под редакцией В.И.Савицкого. М.: Транспорт, 1986. стр.40. Картограф помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| МЕЖОБЗОРНОЕ УСТРОЙСТВО КАРТОГРАФИРОВАНИЯ ПОМЕХ | 1985 |
|
RU2040802C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ | 1998 |
|
RU2127437C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
Способ обнаружения радиолокационных помех при двоично-временном квантовании радиолокационной информации относится к способам борьбы с помехами, используемыми в обработке радиолокационной информации, в частности в аппаратуре первичной обработки радиолокационной информации. Достигаемым техническим результатом является повышение вероятности обнаружения участков радиолокационного пространства, пораженных помехой. Способ заключается в том, что подсчитывают количество двоичных «единиц» в азимутально-дальностном участке площадью 4·n·m элементарных ячеек радиолокационного пространства, состоящем из 2n элементарных ячеек по дальности в 2m соседних зондированиях по азимуту, сравнивают подсчитанное количество двоичных «единиц» с пороговым значением, в случае превышения порога объявляют данный азимутально-дальностной участок пораженным помехой. Переход от одного азимутально-дальностного участка к следующему проводится с «шагом», равным половине азимутально-дальностного участка по дальности в пределах данного азимутального сектора, и с «шагом», равным половине азимутально-дальностного участка по азимуту, при сдвиге по азимуту. При этом площадь исследуемого участка остается постоянной, всегда равной площади азимутально-дальностного участка, т.е. состоит из 4·n·m элементарных ячеек. 7 ил.
Способ обнаружения радиолокационных помех при двоично-временном квантовании радиолокационной информации, состоящий в том, что подсчитывают количество двоичных «единиц» в азимутально-дальностном участке площадью 4·n·m элементарных ячеек радиолокационного пространства, состоящем из 2n элементарных ячеек по дальности в 2m соседних зондированиях по азимуту, сравнивают подсчитанное количество двоичных «единиц» с пороговым значением, объявляют данный азимутально-дальностной участок пораженным помехой в случае превышения порога, отличающийся тем, что переход от одного азимутально-дальностного участка к следующему азимутально-дальностному участку проводят с «шагом», равным половине азимутально-дальностного участка по дальности в пределах данного азимутального сектора, и с «шагом», равным половине азимутально-дальностного участка по азимуту при сдвиге по азимуту.
| Автоматизированные системы управления воздушным движением | |||
| Справочник | |||
| Под ред | |||
| САВИЦКОГО В.И., Москва, Транспорт, 1986, с.40 | |||
| RU 2000114438 А, 27.05.2002 | |||
| СПОСОБ СЕЛЕКЦИИ ИНФОРМАЦИИ О ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТАХ С ОБЕСПЕЧЕНИЕМ ОТСЕВА ЛОЖНОЙ ТРАССОВОЙ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2099740C1 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| US 2007018883 А1, 25.01.2007 | |||
| US 2005104766 A1, 19.05.2005 | |||
| WO 2006078314 A2, 27.07.2006. | |||

