Изобретение относится к области навигации воздушного судна (ВС) и может быть использовано для коррекции по скорости, координатам и курсу систем счисления ВС.
Известен способ определения курса ВС оптическим методом с помощью теодолита, установленного на борту ВС и ориентиров, установленных на земле, и посредством которого определяют направление продольной оси самолета, углы визирования относительно продольной оси ВС, и по известным расстояниям между ориентирами R1 и R2, определенным азимутам двух ориентиров А1 и А2, определяют курс ВС (см., например, SU 267474, 04.01.1988 г.).
Недостатками данного способа являются недостаточная точность, связанная с субъективным фактором - присутствием человека-оператора, необходимость больших аппаратурных затрат.
Наиболее близкими по технической сущности заявляемому изобретению являются способ определения курса и координат ВС (см., например, Бондарев В.Г., Ипполитов С.В., Конотоп В.И., Захарин А.В., Лейбич А.А. Способ определения курса и координат самолета, RU 2356012, 20.05.09 г. (прототип) с помощью установленного в районе стартовой позиции сканирующего в горизонтальной плоскости лазерного маяка, излучение которого модулируется в зависимости от угла поворота, и приемников оптического излучения, определенным образом установленных на ВС. Используя данные о величинах базисных расстояний АВ, ВС и углов А, С между приемниками излучения, углах поворота луча лазера АА, АВ, АС, отсчитываемых от направления на Север до линии встречи луча лазера с приемниками А, В, С блока приемников излучения лазера, определяют курс и координаты ВС.
Недостатками данного способа является низкая точность коррекции навигационных параметров из-за отсутствия информации о скорости ВС.
Технической задачей изобретения является измерение скорости ВС, что повышает точность коррекции навигационной системы ВС по курсу, координатам и скорости.
Решение технической задачи состоит в том, что в известном способе, основанном на формировании кодированного лазерного излучения в направлении на ВС, приеме лазерного излучения тремя приемниками, установленными на борту ВС определенным образом так, что два из них расположены на продольной оси ВС, а третий вне продольной оси, декодировании принятых сигналов и определении курса и координат ВС, на основе данных об азимутальных углах приемников излучения, базисных расстояниях и углах между приемниками излучения; отличающийся тем, что, последовательно фиксируют два соседних момента времени приема сигнала приемником, установленным вне продольной оси (ti и ti) и вычисляют скорость ВС по формуле:
 ,
,
где l1 и l2 - расстояние между лазерным ориентиром и приемником ВС, вычисленные в моменты времени t1 и t2 соответственно;
AB1 и AB2 - углы поворота луча лазера, отсчитываемые от направления на север до линии встречи луча лазера с приемником, вычисленные в моменты времени t1 и t2 соответственно;
Δt - промежуток времени между моментами времени t1 и t2, определяемый как Δt=t2-t1.
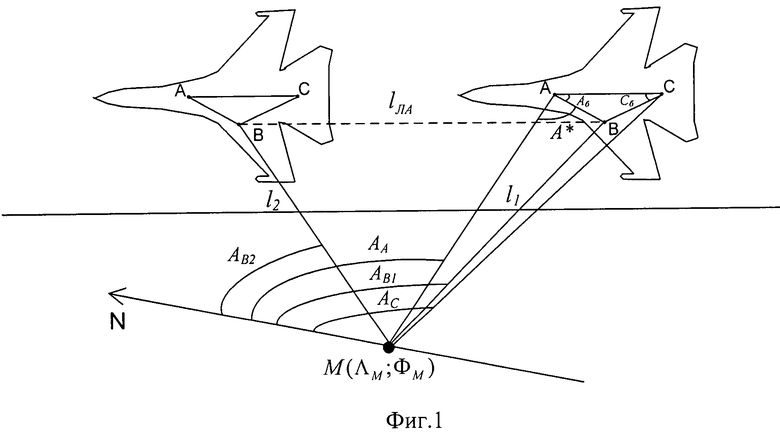
Сущность изобретения поясняется фиг.1, где представлено взаимное расположение источника лазерного излучения и приемников ВС для двух моментов времени t1 и t2. На фиг.1 обозначено:
А, В, С - приемники лазерного излучения, установленные на борту ВС;
М(ΛM, ΦM) - источник лазерного излучения М, координаты которого AM, ФM известны;
Aб и Cб - базисные углы между приемниками лазерного излучения А и С;
АВ и AC - базисные расстояния между приемниками лазерного излучения;
lЛА - расстояние, пройденное ЛА за промежуток времени t1 и t2;
А* - угол между стороной АВ и отрезком, соединяющим источник лазерного излучения и приемник лазерного излучения В;
АA и AC - углы поворота луча лазера, отсчитываемые от направления на север до линии встречи луча лазера с приемником;
l1 и l2 - расстояние между лазерным ориентиром и приемником, вычисленные в моменты времени t1 и t2;
AB1 и AB2 - углы поворота луча лазера, отсчитываемые от направления на север до линии встречи луча лазера с приемником, вычисленные в моменты времени t1 и t2;
N - прямая, обозначающая северное направление.
Из фиг.1 видно, что скорость ВС можно определить по формуле:
 ,
,
где lЛА определяется, как
 ,
,
а Δt определяется, как
Δt=t2-t1.
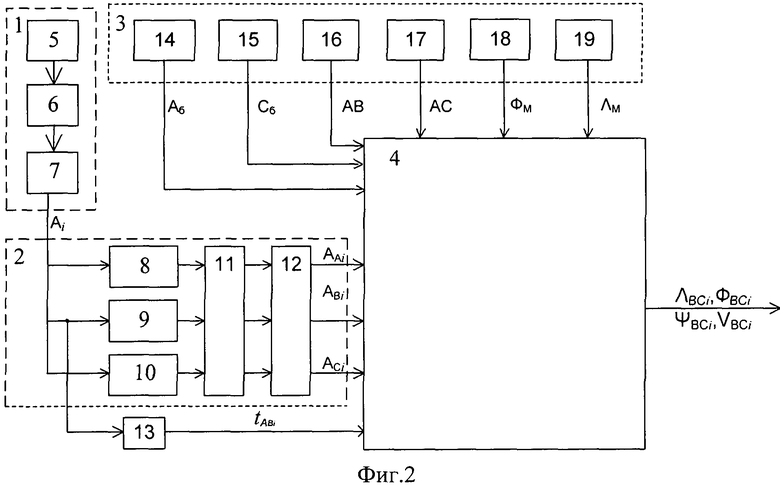
Способ определения координат, курса и скорости ВС может быть реализован, например, с помощью устройства, структурная схема которого приведена на фиг.2, на которой обозначены блок лазерного ориентира 1, блок приемников излучения 2, запоминающее устройство 3, вычислитель 4, лазер 5, кодирующее устройство 6, датчик угла луча лазера 7, приемники излучения лазера 8, 9, 10, декодирующее устройство 11, усилитель 12, хронометр 13, задатчики базисных углов Aб и Cб приемников лазерного излучения 14, 15, задатчики базисных расстояний АВ и ВС между приемниками лазерного излучения 16, 17, задатчики координат лазерного ориентира ΛM и ΦM 18, 19.
Устройство от известных (см., например, Бондарев В.Г., Ипполитов С.В., Конотоп В.И., Захарин А.В., Лейбич А.А. Способ определения курса и координат самолета, RU 2356012, 20.05.09 г. (прототип) отличается тем, что дополнительно введен хронометр 13 кварцевого типа.
Реализуется способ следующим образом. Лазерное излучение, создаваемое в блоке лазерного ориентира 1, кодируемое по закону f=f(Ai), где А - угол поворота луча лазера, принимается тремя приемниками лазерного излучения. Декодируемые и усиленные сигналы в блоке оптических сигналов, пропорциональные значениям азимутных углов AAi, ABi, ACi, передаются в вычислитель 4. При этом с помощью хронометра 13 регистрируется время приема лазерного излучения соответствующим приемником ti и данная информация передается так же в вычислитель 4. Запоминающее устройство служит для хранения и выдачу в вычислитель постоянных величин: углов А, С и сторон АВ, ВС базиса оптических приемников ВС, координат лазерного маяка ΛM, ΦM. Вычислитель осуществляет непосредственный расчет курса ΨBC и координат ΛBC, ΦBC и скорости ВС VBC и выдачу для последующей корректировки систем счисления ВС.
Изобретение относится к области навигации воздушного судна (ВС) и может быть использовано для коррекции навигационных систем BC по скорости, координатам и курсу. Технический результат - повышение точности коррекции навигационной системы ВС по курсу, координатам и скорости. Для этого осуществляют фиксирование двух соседних моментов времени приема лазерного излучения приемником, установленным на ВС вне его продольной оси, и вычисления скорости ВС по формуле: 
Способ определения координат, курса и скорости воздушного судна, основанный на формировании кодированного лазерного излучения в направлении на BC, приеме лазерного излучения тремя приемниками, установленными на борту ВС определенным образом так, что два из них расположены на продольной оси ВС, а третий вне продольной оси, дешифрировании принятых сигналов и определении курса и координат ВС, на основе данных об азимутальных углах приемников излучения, базисных расстояниях и углах между приемниками излучения, отличающийся тем, что последовательно фиксируют два соседних момента времени приема сигнала приемником, установленным вне продольной оси (t1 и t2), и вычисляют скорость ВС по формуле:

где l1 и l2 - расстояние между лазерным ориентиром и приемником ВС, вычисленные в моменты времени t1 и t2 соответственно;
AB1
и АB2 - углы поворота луча лазера, отсчитываемые от направления на север до линии встречи луча лазера с приемником, вычисленные в моменты времени t1 и t2 соответственно;
Δt - промежуток времени между моментами времени t1 и t2, определяемый как Δt=t2-t1.
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА И КООРДИНАТ САМОЛЕТА | 2007 |
|
RU2356012C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ, НАПРАВЛЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2006 |
|
RU2321029C1 |
| МАТВИЕНКО Г.Г., САМОХВАЛОВ И.В., РЫБАЛКО B.C | |||
| и др | |||
| Оперативное определение компонентов скорости ветра с помощью лидара // Оптика атмосферы и океана, 1988, т.1, №2, с.68-72 | |||
| Способ дистанционного измерения проекции скорости ветра на выбранное направление | 1979 |
|
SU812027A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ С ПОСЛЕДУЮЩЕЙ ИХ ИДЕНТИФИКАЦИЕЙ И АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИЕЙ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2382416C2 |
| Лазерная локация / МАТВЕЕВ И.Н., ПРОТОПОПОВ В.В., ТРОИЦКИЙ | |||

