Изобретение относится к оборудованию для автоматизации работы технологического оборудования и может найти применение на станках с ЧПУ, датчики обратной связи по перемещению которых представляют собой квадратурные энкодеры.
Известно устройство расчета и коррекции эквидистантного контура, позволяющее корректировать отклонения размеров режущего инструмента от заданного в управляющей программе системы ЧПУ, содержащее счетчики, регистры, элементы «И» и «ИЛИ» и другие дискретные вычислительно-логические устройства [1].
Недостатком этого устройства являются ограниченные функциональные возможности, позволяющие компенсировать только детерминированные, заранее заданные отклонения размеров инструмента от номинальных значений, а также возможность применения только к определенному типу систем ЧПУ. Другим недостатком устройства является его высокая сложность.
Известна система ЧПУ, включающая устройство для измерения геометрических параметров обработанной детали с целью коррекции размеров инструмента для последующих циклов обработки, содержащая измерительный датчик - квадратурный энкодер, регистры текущих и предыдущих значений квадратурных сигналов и дешифратор-ПЗУ этих состояний, выходами которого являются единичные приращения перемещения со знаком. На программно-аппаратных средствах процессора системы ЧПУ приращения трансформируются в график или численное представление отклонения размера от номинального [2].
Недостатком этого устройства является сложность коррекции текущих отклонений размеров детали в процессе обработки, что связано с необходимостью пересчета управляющей программы в реальном масштабе времени, требующего больших объемов программно-аппаратных средств высокого быстродействия. Другим недостатком этого устройства является ограниченность применения, связанная с привязкой к определенному набору программно-аппаратных средств конкретной системы ЧПУ.
Задачей настоящего изобретения является разработка устройства для коррекции погрешностей изготовления деталей на станках с ЧПУ, отличающегося универсальностью и простотой.
Поставленная задача решается тем, что в устройстве для коррекции погрешностей изготовления деталей на станках с ЧПУ, содержащем измерительный датчик-энкодер, а также канал преобразования последовательных состояний квадратурных сигналов датчика, образованный регистром сигналов и дешифратором приращений, причем выходы регистра сигналов соединены со входами дешифратора приращений, а выходы датчика коррекции соединены со входами регистра сигналов и дешифратора приращений, новым является то, что устройство снабжено вторым идентичным каналом преобразования, вход которого соединен с датчиком-энкодером коррекции, а выходы положительного и отрицательного приращений дешифратора каждого канала соединены с одним из входов двухвходовых элементов «И», при этом устройство дополнительно снабжено двухтактным генератором импульсов, двумя двухвходовыми элементами «ИЛИ», двухразрядным двоичным реверсивным счетчиком, элементом «исключающее И» и двумя элементами «НЕ», вторые входы элементов «И» первого канала соединены с входом управления записью регистра второго канала и первым выходом генератора, вторые входы элементов «И» второго канала соединены с входом управления записью регистра первого канала и вторым выходом генератора, элементы «И» каждого канала, регистрирующие положительные приращения, соединены с входами первого элемента «ИЛИ», а элементы «И» каждого канала, регистрирующие отрицательные приращения, соединены со входами второго элемента «ИЛИ», выходы элементов «ИЛИ» соединены с входами реверсивного счетчика, выход первого разряда которого соединен с первым входом элемента «исключающее И», выход второго разряда счетчика соединен с вторым входом элемента «исключающее И» и входом одного из элементов «НЕ», а выход элемента «исключающее И» соединен с входом другого элемента «НЕ», при этом выходы суммарного квадратурного сигнала образованы соответственно выходами элемента «исключающее И», элемента «НЕ», второго разряда счетчика, элемента «НЕ».
Предпосылкой для решения поставленной задачи является то, что при быстродействии современной элементной базы алгебраическое суммирование единичных приращений по основному каналу обратной связи по перемещению и каналу коррекции можно выполнять методом подсчета единичных приращений по каналам, синхронизированных двумя разнесенными по времени тактами генератора, а суммарный квадратурный сигнал можно получить шифрацией 4-х состояний двухразрядного двоичного счетчика, выполняющего функции сумматора. При реализации этих предпосылок универсальность устройства обеспечивается включением устройства между выходом датчика обратной связи и входом системы ЧПУ любой модели.
При проведении патентных исследований не выявлены решения, идентичные заявленному изобретению, а следовательно, заявленное решение соответствует условию охраноспособности «новизна».
Сущность заявленного изобретения не следует явным образом из решений, известных из уровня техники, а следовательно, заявленное изобретение соответствует условию охраноспособности «изобретательский уровень».
Сведений, изложенных в материалах заявки, достаточно для практического осуществления изобретения.
Конструктивное выполнение элементов и блоков устройства, не раскрытое в данной заявке, является известным и не составляет предмета изобретения.
Сущность заявленного изобретения поясняется графическими материалами, на которых:
- на фиг.1 представлена схема устройства;
- на фиг.2 представлен принцип дешифрации квадратурных сигналов при единичных приращениях в положительном (по часовой стрелке) и отрицательном (против часовой стрелки) направлении;
- на фиг.3 представлена диаграмма шифрации суммарного квадратурного сигнала;
- на фиг.4 представлена схема подсоединения устройства к системе ЧПУ.
Устройство содержит основной измерительный датчик-энкодер 1, измерительный датчик-энкодер коррекции 2, двухтактный генератор импульсов 3 и два идентичных канала преобразования последовательных состояний квадратурных сигналов датчиков в двухканальный «+» и «-» число-импульсный код приращений. В каждый канал преобразования входят по одному регистру 4, 5, по одному дешифратору приращений 6, 7, по одному двухвходовому элементу «И» для синхронизации положительных единичных приращений 8, 9 и по одному двухвходовому элементу «И» для синхронизации отрицательных единичных приращений 10, 11. Каждый из датчиков 1 и 2 связан с одним из регистров и одним из дешифраторов перемещений, принадлежащих одному каналу. Генератор импульсов 3 связан с одним из входов элементов 8, 9, 10, 11. Регистр 4 одного канала связан с элементами «И» 9 и 11 другого канала, а регистр 5 связан с элементами «И» 8 и 10. Устройство также содержит двухвходовые элементы «ИЛИ» 12, 13 для объединения соответственно положительных и отрицательных приращений обоих каналов и двухразрядный (двухканальный) реверсивный двоичный счетчик 14. Шифрация состояний счетчика для формирования суммарного квадратурного выходного сигнала устройства осуществляется с помощью элемента «исключающее И» 15 и элементов «НЕ» 16, 17. Устройство включается в разрыв кабеля связи между датчиком обратной связи по перемещению станка и системой ЧПУ в соответствии с фиг.4. При этом выходами устройства для получения суммарного квадратурного сигнала являются выходы элемента «исключающее И», выходы элементов «И», выход второго разряда счетчика.
Работает устройство следующим образом.
Во время работы станка с ЧПУ возможны четыре ситуации:
а) движения по траектории нет, коррекция отсутствует; при этом сигналы на выходах датчиков 1 и 2 не изменяются, состояние сигналов на выходах регистров 4, 5 идентично состоянию сигналов на выходах датчиков 1, 2, так как тактами генератора неизменяемые сигналы датчиков переписываются в регистры; на выходах дешифраторов приращений 6, 7 сигналы «+» и «-» отсутствуют, вследствие чего на выходах элементов 8, 9, 10, 11, 12, 13 сигналов нет и состояние счетчика 14 не изменяется, соответственно не изменяется состояние на выходах элементов 15, 16, 17 и состояние выходных квадратурных сигналов устройства также не изменяется. Ситуацию поясняет зона «а» диаграммы на фиг.3.
б) движения по траектории есть, коррекция отсутствует; при этом сигналы на выходах датчика 1 изменяются при движении в отрицательном направлении в соответствии с фиг.2, а при движении в положительном направлении в соответствии с фиг.3, вследствие чего с выходов элементов 8 или 9 через элементы 12 или 13 на счетчик 14 будут поступать импульсы, синхронизированные первым тактом генератора при каждой смене состояния сигналов основного датчика; состояние счетчика 14 будет циклически изменяться. Зоне «б» на фиг.3 соответствует единичное приращение в отрицательном направлении. При этом в соответствии с фиг.2 изменяется комбинация сигналов датчика, дешифратор 6 (фиг.1) вырабатывает сигнал «-Д», который опрашивается тактом 1 на элементе 10 и через ИЛИ 13 уменьшает на единицу состояние счетчика 14, и оно в соответствии с фиг.3 из состояния «00» переходит в состояние «11», при этом на выходе элемента 15 состояние «0» не изменяется, не изменяется и суммарный выходной сигнал А, а так как старший разряд счетчика перешел в состояние « единица», то суммарный выходной сигнал В переходит в единичное состояние. За тактом Т1 генератора 3 следует такт Т2, который переписывает состояние датчика 1 в регистр 4, на входах дешифратора 6 сигналы текущего и предыдущего состояний сигналов датчика одинаковы и в соответствии с фиг.2 и фиг.3 на выходах дешифратора 6 сигналы отсутствуют, при этом на выходе устройства состояние суммарного сигнала не изменяется.
в) движения по траектории нет, сигналы коррекции вырабатываются. Работу устройства в этой ситуации поясняет зона «в» на фиг.3. Функционирование устройства аналогично ситуации «б», но сигналы изменения состояния счетчика 14 вырабатываются элементами 5, 7, 11, 13.
г) есть движение по траектории и вырабатываются сигналы коррекции. В этой ситуации одновременно работают элементы, указанные в ситуациях «б» и «в». На диаграмме фиг.3 в зоне «г» основной датчик вырабатывает два единичных приращения в отрицательном направлении, а датчик коррекции сначала сигнал единичного приращения в отрицательном направлении, затем единичное приращение в положительном направлении.
Устройство может быть использовано в станках с ЧПУ моделей СВО 25 и СВО 14 для компенсации погрешностей обработки крупногабаритных цилиндрических и конических обечаек. Устройство позволит компенсировать погрешности обработки, связанные с нестационарными деформациями тонкостенных заготовок в процессе обработки, вызванных перераспределением внутренних напряжений материала заготовок.
Источники информации
1. В.Л.Кошкин. Аппаратные системы числового программного управления. Москва. Машиностроение. 1989, стр.87-116.
2. Каталог NC 60 SIEMENS, раздел 2, 2002 г. - наиболее близкий аналог.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Система программного управленияМЕТАллОРЕжущиМ CTAHKOM | 1978 |
|
SU805262A1 |
| Система автоматической настройки инструмента на станках с ЧПУ | 1982 |
|
SU1065091A1 |
| Устройство контроля затупления режущего инструмента на станках с ЧПУ | 1986 |
|
SU1442875A1 |
| Цифровой линейный интерполятор с оценочной функцией | 1981 |
|
SU991375A1 |
| Устройство стабилизации скорости резания для токарно-винтовых станков с числовым программным управлением | 1983 |
|
SU1180845A1 |
| Устройство для подсчета деталей | 1986 |
|
SU1474707A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
Изобретение относится к оборудованию для автоматизации работы технологического оборудования и может найти применение на станках с ЧПУ. Устройство содержит датчик измерения геометрических параметров детали (1), датчик коррекции размеров инструмента (2), двухвходовый элемент «И» (8), генератор импульсов (3), счетчик (4), дешифратор (6), регистр квадратурных сигналов (4), элемент «исключающее И» (15), два элемента «НЕ» (16, 17), два элемента «ИЛИ» (12, 13) и три дополнительных двухвходовых элемента «И» (9, 10, 11). Выход регистра (4) соединен с входом упомянутого дешифратора (6), образующими канал преобразования последовательных состояний квадратурных сигналов датчика измерения геометрических параметров детали (1). Устройство снабжено дешифратором (7) и регистром квадратурных сигналов (5), образующими канал преобразования последовательных состояний квадратурных сигналов датчика коррекции размеров инструмента (2). Технический результат заключается в компенсации погрешностей обработки деталей на станках с ЧПУ. 4 ил.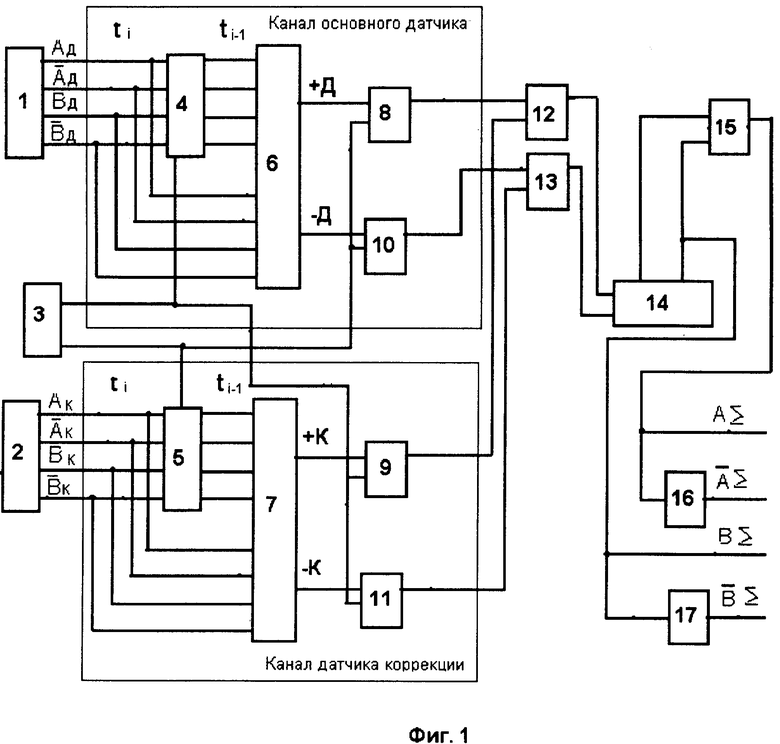
Устройство для коррекции погрешностей изготовления деталей на станках с ЧПУ, содержащее датчик измерения геометрических параметров детали, датчик коррекции размеров инструмента, двухвходовый элемент И, генератор импульсов и счетчик, отличающееся тем, что оно снабжено дешифратором и регистром квадратурных сигналов, выход которого соединен с входом упомянутого дешифратора, образующими канал преобразования последовательных состояний квадратурных сигналов датчика измерения геометрических параметров детали, дешифратором и регистром квадратурных сигналов, выход которого соединен с входом упомянутого дешифратора, образующими канал преобразования последовательных состояний квадратурных сигналов датчика коррекции размеров инструмента, элементом Исключающее И, двумя элементами НЕ, двумя элементами ИЛИ и тремя дополнительными двухвходовыми элементами И, при этом датчик измерения геометрических параметров детали и датчик коррекции размеров инструмента выполнены в виде энкодеров, использованы двухтактный генератор импульсов и двухразрядный двоичный реверсивный счетчик, первые входы двухвходовых элементов И канала преобразования последовательных состояний квадратурных сигналов датчика измерения геометрических параметров детали соединены с выходами дешифратора канала преобразования последовательных состояний квадратурных сигналов датчика измерения геометрических параметров детали, вторые входы упомянутых двухвходовых элементов И соединены с входом управления записью сигналов регистра канала преобразования последовательных состояний квадратурных сигналов датчика коррекции размеров инструмента и первым выходом генератора импульсов, первые входы двухвходовых элементов И канала преобразования последовательных состояний квадратурных сигналов датчика коррекции размеров инструмента соединены с выходами дешифратора канала преобразования последовательных состояний квадратурных сигналов датчика коррекции размеров инструмента, а вторые входы упомянутых двухвходовых элементов И соединены с входом управления записью сигналов регистра канала преобразования последовательных состояний квадратурных сигналов датчика измерения геометрических параметров детали и вторым выходом генератора импульсов, выходы двухвходовых элементов И каждого канала, регистрирующих положительные приращения, соединены с входами первого элемента ИЛИ, а выходы двухвходовых элементов И каждого канала, регистрирующих отрицательные приращения, соединены с входами второго элемента ИЛИ, выходы элементов ИЛИ соединены с входами счетчика, выход первого разряда которого соединен с первым входом элемента Исключающее И, выход второго разряда счетчика соединен с вторым входом элемента Исключающее И и входом первого элемента НЕ, при этом выход элемента Исключающее И соединен с входом второго элемента НЕ, а выходы суммарного квадратурного сигнала соединены соответственно с выходами элемента Исключающее И, первого и второго элементов НЕ и второго разряда счетчика.
| Устройство для адаптивного управления металлорежущим станком | 1989 |
|
SU1667008A1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2004 |
|
RU2293010C2 |
| 0 |
|
SU344633A1 | |
| JP 60020838 A, 02.02.1985. | |||

