Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин (температуры, частоты генерации, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях, где используется автоматика.
При создании замкнутых динамических систем управления, применяемых во многих отраслях науки и техники, актуальна задача достижения устойчивости переходного процесса и высокой точности. В таких системах ошибка управления с обратным знаком усиливается в регуляторе и поступает на управляемый объект. Для обеспечения устойчивости системы затухание амплитудно-частотной характеристики (а.ч.х.) разомкнутого ее контура управления в области частот, где усиление близко к единичному, накладываются ограничения на крутизну затухания этой характеристики. Крутизна затухания измеряется кратностью порядка объекта: первому порядку соответствует 20 дБ/дек, второму 40 дБ/дек и так далее. Устойчивость системы обеспечивается затуханием а.ч.х. в указанной области только первого порядка. Если а.ч.х. объекта затухает, описывается более высоким порядком, то регулятор на его входе должен компенсировать это затухание соответствующим подъемом а.ч.х. в этой же области частот за счет содержащегося в нем дифференциатора. Дифференциатор понижает кратность крутизны затухания на единицу. Один дифференциатор может скомпенсировать двукратное затухание до требуемого однократного, для компенсации трехкратного затухания потребуется два дифференциатора и так далее. Применение более чем одного дифференциатора резко увеличивает высокочастотные шумы, поэтому нежелательно. Поэтому потенциальное быстродействие системы ограничивается той областью частот, в которой а.ч.х. объекта еще не превышает затухания второго порядка.
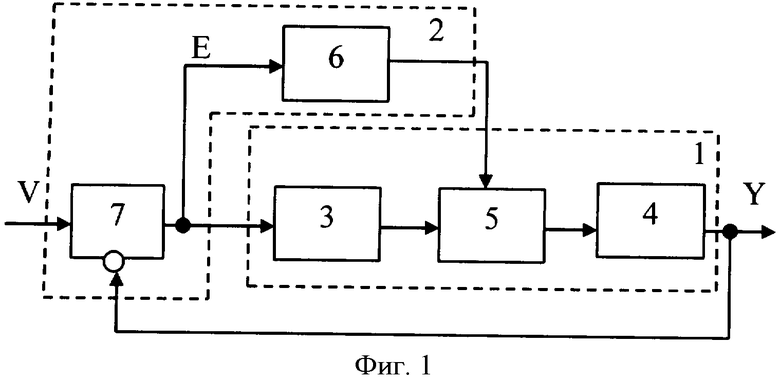
Известна система с обратной связью и прямым параллельным регулятором, схема которой приведена на фиг.1, где: 1 - объект, 2 - регулятор, 3 - медленная часть объекта, 4 - быстрая часть объекта, 5 - сумматор объекта, 6 - параллельный канал регулятора, 7 - вычитающее устройство регулятора; входом системы V является неинвертирующий вход вычитающего устройства, выходом системы Y является выход объекта; медленная часть 3 объекта 1 соединена с быстрой частью 4 объекта 1 последовательно через сумматор 5 объекта 1 [Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза. Учеб. пособие для ВУЗов. - СПб.: «БХВ-Петербург», 2004. с.436]. Система работает следующим образом. На неинвертирующий вход вычитающего устройства 7 поступает сигнал предписанного значения V, а на его инвертирующий вход поступает сигнал Y с выхода объекта 1. До начала работы выходной сигнал быстрой части 4 объекта 1 не совпадает с предписанным значением. Вычитающее устройство 7 формирует электрический сигнал ошибки Е, равный разности сигнала предписанного значения V и выходного сигнала объекта Y, и подает его на вход медленной части 3 объекта 1 и на параллельный канал 6 регулятора 2. Медленная часть объекта 3 не пропускает высокочастотную часть сигнала ошибки с выхода вычитающего устройства 7 на вход быстрой части объекта 4 либо вносит чрезмерное запаздывание. Параллельный канал 6 компенсирует этот недостаток, поскольку он передает высокочастотную часть сигнала ошибки через сумматор 5 на вход быстрой части объекта 4. Подача сигнала ошибки с выходов регулятора 2 на входы объекта 1 заставляет объект изменять свой выходной сигнал в нужном направлении и на нужную величину, чтобы уменьшить ошибку до пренебрежимо малого значения. В итоге выходной сигнал объекта становится равным предписанному значению.
Основным недостатком параллельного регулятора является ограниченная возможность его применения, поскольку для этого требуется редко встречающаяся структура объекта. Большинство реально встречающихся объектов неделимо на подсистемы с такими свойствами.
Наиболее близким к заявляемому регулятору является регулятор, схема которого приведена на фиг.2, где
- 6 - регулятор;
- 7 - объект;
- 8 - вычитающее устройство регулятора;
- 9 - последовательный канал регулятора;
[Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза. Учеб. пособие для вузов. - СПб.: БХВ-Петербург, 2004. с.435]. Этот регулятор принят за прототип изобретения. В его схеме не используется никакого иного воздействия на объект, кроме подачи управляющего сигнала на единственный его вход, поэтому этот регулятор получил широкое распространение. Входами регулятора являются входы вычитающего устройства, выходом регулятора является выход последовательного канала, выходом всей системы является выход объекта Y.
Этот регулятор в составе системы работает следующим образом.
На неинвертирующий вход вычитающего устройства 8 поступает сигнал предписанного значения V, а на инвертирующий вход поступает выходной сигнал Y объекта 7. До начала работы выходной сигнал Y объекта 7 не совпадает с предписанным значением V. Вычитающее устройство 8 регулятора 6 формирует сигнал ошибки Е (как правило, электрический), равный разности сигнала предписанного значения V и выходного сигнала Y объекта 7, и подает его на последовательный канал 9 регулятора 6. Последовательный канал 9 формирует управляющий сигнал U, который поступает на вход объекта 7 и воздействует на него таким образом, чтобы выходной сигнал Y объекта 7 совпадал с предписанным сигналом V. Последовательный канал 9, как правило, содержит пропорциональный, дифференцирующий и интегральный усилители со своими коэффициентами усиления и сумматор, объединяющий выходы этих усилителей и подающий суммарный сигнал на выход регулятора. Подача сигнала управления U с выхода последовательного канала 9 на вход объекта 7 заставляет объект 7 изменять свой выходной сигнал Y в нужном направлении и на нужную величину, чтобы уменьшить ошибку Е до пренебрежимо малого значения. Нужное направление изменения обеспечивается инвертированием на инвертирующем входе сумматора 8, в результате чего ошибка управления Е и изменение выходной величины Y, ей порождаемое, противоположны по знаку. Нужная величина изменения выходной величины Y обеспечивается большим коэффициентом усиления в контуре и отрицательной обратной связью. Ошибка в силу известного соотношения для статического режима в системе с большим коэффициентом и отрицательной обратной связью равна:

где V - предписанное значение выходной величины Y, Е - ошибка управления, Кр и
Ко - коэффициенты усиления регулятора и объекта [Никулин Е.А. Основы теории автоматического управления. Частотные методы анализа и синтеза. Учеб. пособие для вузов. - СПб.: БХВ-Петербург, 2004. с.37]. При достаточно большом значении произведения Кр и Ко за счет увеличения Кр ошибка Е может быть сделана сколь угодно малой. В итоге выходной сигнал объекта Y становится равным предписанному значению V, чем и достигается цель регулятора.
Основным недостатком прототипа является невозможность существенного повышения быстродействия системы с объектом второго и более высокого порядка. Для устойчивости системы знаменатель соотношения (1) никогда не должен достигать нулевого или слишком маленького значения. Для этого запаздывание по фазе в критической зоне частот, где коэффициент усиления разомкнутого контура близок к единице, не должно достигать 180 градусов. Если запаздывание в этой зоне больше, уменьшить его на 90 градусов позволяет дифференцирующий усилитель, содержащийся для этой цели в последовательном регуляторе 9. Большее по величине запаздывание резко ограничивает достижимое быстродействие системы, поскольку применение двух и более дифференцирующих усилителей нежелательно в связи с существенным возрастанием влияния высокочастотных шумов на выход объекта. Таким образом, ограниченное быстродействие объекта ограничивает быстродействие всей системы, поскольку задает максимальную частоту, на которой усиление контура управления равно единице. Это ограничивает усиление также на всех других частотах, поскольку скорость роста коэффициента усиления КрКо в системе с падением частоты ограничена по условиям устойчивости объекта. Так как коэффициент усиления определяет точность системы, в прототипе точность получается ограниченной во всем частотном диапазоне.
Таким образом, прототип не обеспечивает высокого быстродействия и высокой точности в достаточной степени для ряда часто встречающихся объектов, например объектов третьего и более высокого порядка.
Предлагаемое изобретение решает задачу повышения точности и быстродействия с сохранением устойчивости.
Поставленная задача решается тем, что предлагается регулятор для системы с обратной связью, содержащий вычитающее устройство, последовательный канал, обводной канал и сумматор, причем выход последовательного канала соединен с входами объекта и обводного канала, выход объекта соединен с инвертирующим входом через сумматор, второй вход которого соединен с выходом обводного канала, выход вычитающего устройства соединен с входом последовательного канала, неинвертирующий вход вычитающего устройства является входом всей системы, а выход объекта - ее выходом, при этом усиление параллельного канала в области высоких частот существенно превышает усиление объекта, а в области низких частот существенно меньше усиления объекта.
Вычитающее устройство может быть выполнено на дифференциальном усилителе или на операционном усилителе.
Сумматор может быть выполнен на дифференциальном усилителе или на операционном усилителе.
Последовательный канал может содержать пропорциональный, интегральный, дифференциальный и суммирующий усилитель, некоторые из этих усилителей могут отсутствовать; в простейшем случае последовательный канал может содержать только пропорциональный усилитель.
Обводной канал может содержать усилитель. Коэффициент усиления этого усилителя в рабочей полосе частот много меньше усиления объекта на этих частотах, а в высокочастотной части много больше усиления объекта на высоких частотах.
Схема предлагаемой системы приведена на фиг.3. Она содержит:
- 6 - регулятор;
- 7 - объект;
- 8 - вычитающее устройство регулятора;
- 9 - последовательный канал регулятора;
- 10 - обводной канал регулятора;
- 11 - сумматор.
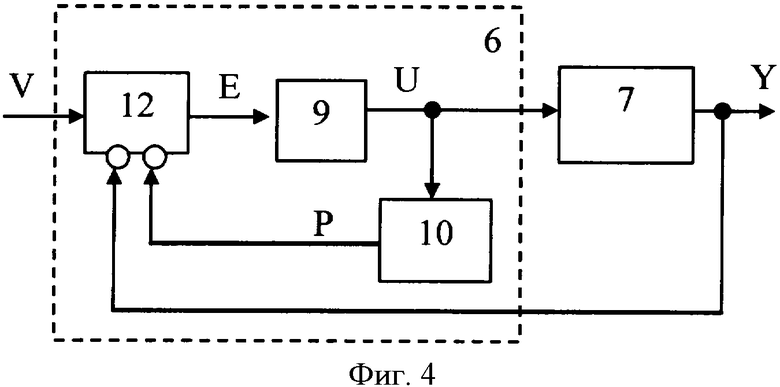
Входами регулятора являются неинвертирующий вход вычитающего устройства 8 и вход сумматора 11, выходом регулятора является выход последовательного канала 6, выходом всей системы является выход объекта Y. Вычитающее устройство и сумматор могут быть объединены в одно устройство 12, как показано на фиг.4.
Этот регулятор в составе системы работает следующим образом.
На неинвертирующий вход вычитающего устройства 8 поступает сигнал предписанного значения V, а на его инвертирующий вход через сумматор 11 поступает выходной сигнал Y объекта 7. До начала работы выходной сигнал Y объекта 7 не совпадает с предписанным значением V. Вычитающее устройство 8 регулятора 6 формирует сигнал ошибки Е (как правило, электрический), равный разности сигнала предписанного значения V и выходного сигнала Y объекта 7, и подает его на последовательный канал 9 регулятора 6. Последовательный канал 9 формирует управляющий сигнал U, который поступает на вход объекта 7 и воздействует на него таким образом, чтобы выходной сигнал Y объекта 7 совпадал с предписанным сигналом V. Последовательный канал 9, как правило, содержит пропорциональный, дифференцирующий и интегральный усилители со своими коэффициентами усиления и сумматор, объединяющий выходы этих усилителей и подающий суммарный сигнал на выход регулятора. Подача сигнала управления U с выхода последовательного канала 9 на вход объекта 7 заставляет объект 7 изменять свой выходной сигнал Y в нужном направлении и на нужную величину, чтобы уменьшить ошибку Е до пренебрежимо малого значения. Нужное направление изменения обеспечивается инвертированием на инвертирующем входе сумматора 8, в результате чего ошибка управления Е и изменение выходной величины Y, ей порождаемое, противоположны по знаку. Нужная величина изменения выходной величины Y обеспечивается большим коэффициентом усиления в контуре и отрицательной обратной связью. Одновременно с этим высокочастотная часть выходного сигнала последовательного канала 9 также поступает через обводной канал 10 на сумматор 11, где суммируется с выходным сигналом Y объекта, и далее совместно с выходным сигналом объекта Y поступает на вычитающее устройство 8. Поэтому та высокочастотная часть спектра сигнала, которая не может пройти через объект 7, или проходит через объект 7 с большим запаздыванием, все же проходит на вычитающее устройство 8 через обводной канал 10 и сумматор 11. Это обеспечивает включение обратной связи на высоких частотах в замкнутом контуре системы из элементов 8, 9, 10 и 11 в той полосе частот, где вследствие малого быстродействия объекта 7 нарушается устойчивая работа контура из элементов 8, 9, 7 и 11. Дополнительный высокочастотный контур, образованный из элементов 8, 9, 10 и 11, позволяет своевременно сформулировать отклик отрицательной обратной связи, чем обеспечивается устойчивость не только этого контура, но и всего контура, так как элементы 7 и 10 можно рассматривать как два параллельно включенных элемента и рассматривать совокупность элементов 7, 10 и 11 как новый объект управления, отличающийся от прежнего объекта 7 тем, что его коэффициент усиления в области высоких частот и быстродействие достаточны для обеспечения устойчивости всего контура. Таким образом, устойчивой оказывается и вся система.
Соотношение (1) для статического режима в системе с большим коэффициентом и отрицательной обратной связью для этой структуры приобретает следующий вид:

где E1 - ошибка выходной величины Z, Кр, Ко и Кок - коэффициенты усиления регулятора, объекта и обводного канала. При достаточно большом значении произведения Кр(Ко+Кок) за счет увеличения Кр ошибка Е1 выходной величины Z может быть сделана сколь угодно малой. Ошибка управления определяется следующим соотношением, очевидным из структуры системы:

В области средних и низких частот обеспечивается соотношение КOK<<КO, при этом КpКO>>1. Учет этого соотношения в соотношении (3) дает примерное равенство Е E1 и неравенство E1<<V. В области высоких частот обеспечивается соотношение КOK>>КO. Это препятствует знаменателю соотношения (3) обращаться в ноль или принимать малое в сравнении с числителем значение в области тех частот, при которых знаменатель соотношения (1) для системы без обводного канала обращался бы в ноль или принимал бы малые значения в сравнении с числителем соотношения (1). Это обеспечивает устойчивость системы: величина ошибки Е во всем диапазоне частот никогда не превышает величину V. В итоге в области низких и средних частот ошибка мала, то есть выходной сигнал объекта Y становится примерно равным предписанному значению V, чем и достигается цель регулятора, а в области высоких частот, хотя ошибка Е и не становится пренебрежимо малой, она остается ограниченной и меньше, чем соответствующая высокочастотная часть входного сигнала V. В высокочастотной части сигнал Y отличается от сигнала V незначительно, а в низкочастотной области совпадает с ним. Таким образом, действием обводного канала обеспечивается устойчивость системы.
E1 и неравенство E1<<V. В области высоких частот обеспечивается соотношение КOK>>КO. Это препятствует знаменателю соотношения (3) обращаться в ноль или принимать малое в сравнении с числителем значение в области тех частот, при которых знаменатель соотношения (1) для системы без обводного канала обращался бы в ноль или принимал бы малые значения в сравнении с числителем соотношения (1). Это обеспечивает устойчивость системы: величина ошибки Е во всем диапазоне частот никогда не превышает величину V. В итоге в области низких и средних частот ошибка мала, то есть выходной сигнал объекта Y становится примерно равным предписанному значению V, чем и достигается цель регулятора, а в области высоких частот, хотя ошибка Е и не становится пренебрежимо малой, она остается ограниченной и меньше, чем соответствующая высокочастотная часть входного сигнала V. В высокочастотной части сигнал Y отличается от сигнала V незначительно, а в низкочастотной области совпадает с ним. Таким образом, действием обводного канала обеспечивается устойчивость системы.
В результате повышается быстродействие и запас устойчивости всей системы. Это позволяет повысить точность и качество управления по средним и низким частотам.
Регулятор может быть также реализован на нескольких операционных усилителях [Воронов А. В. Основы теории автоматического управления. Т.1, М.-Л.: «Энергия», 1965, 396 с.] или в цифровом виде на микропроцессоре с соответствующей программой [Mixed-Signal Control Circuits Use Microcontroller for Flexibility in Implementing PID Algorithms. Analog Devices. http://uk.farnell.com/static/findings/DFl0_aducs.htm].
Таким образом, предлагаемый регулятор обеспечивает системе повышенную точность и быстродействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
| Система с обратной связью | 2021 |
|
RU2756229C1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2540461C1 |
| Многоканальный регулятор | 1987 |
|
SU1532895A1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2015 |
|
RU2584925C1 |
| Адаптивная система управления | 1986 |
|
SU1399700A1 |
| СИСТЕМА С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2541684C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| СИСТЕМА УПРАВЛЕНИЯ С ОБРАТНОЙ СВЯЗЬЮ | 2013 |
|
RU2566339C2 |
| Регулятор | 1980 |
|
SU855607A1 |

Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин (температуры, частоты генерации, скорости и т.д.) с обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях, где используется автоматика. Регулятор для системы с обратной связью содержит последовательно соединенные вычитающее устройство и последовательный канал, соединяющие вход и выход регулятора, включаемого между входом всей системы и входом объекта. Также содержит последовательно соединенные обводной канал и сумматор, причем вход обводного канала соединен с выходом последовательного канала. Выход сумматора соединен с инвертирующим входом вычитающего устройства, а его второй вход соединен с выходом объекта. При этом усиление параллельного канала в области высоких частот существенно превышает усиление объекта, а в области низких частот существенно меньше усиления объекта. Технический результат - повышение точности и быстродействия с сохранением устойчивости. 1 з.п. ф-лы, 4 ил.
1. Регулятор для системы с обратной связью, содержащий последовательно соединенные вычитающее устройство и последовательный канал, соединяющие вход и выход регулятора, включаемого между входом всей системы и входом объекта, отличающийся тем, что он содержит последовательно соединенные обводной канал и сумматор, причем вход обводного канала соединен с выходом последовательного канала, выход сумматора соединен с инвертирующим входом вычитающего устройства, а его второй вход соединен с выходом объекта; при этом усиление параллельного канала в области высоких частот существенно превышает усиление объекта, а в области низких частот существенно меньше усиления объекта.
2. Регулятор по п.1, отличающийся тем, что вычитающее устройство и сумматор объединены в одно устройство с тремя входами.
| НИКУЛИН Е.А | |||
| Основы теории автоматического управления | |||
| Частотные методы анализа и синтеза | |||
| Учеб | |||
| пособие для вузов | |||
| - СПб.: БХВ-Петербург, 2004 | |||
| Способ получения твердых неплавких и нерастворимых продуктов уплотнения формальдегида с фонолами | 1925 |
|
SU435A1 |
| RU 2058571 C1, 20.04.1996 | |||
| Регулятор тока электронного луча | 1987 |
|
SU1669671A1 |
| Цифровой регулятор | 1985 |
|
SU1293695A1 |
| JP 7253803 A, 03.10.1995. | |||

