Изобретение относится к области автоматизации силовых установок транспортных средств, в частности к способам и устройствам управления многодвигательными силовыми установками, установленными на транспортных средствах, например на судах.
Известны способ и система управления главным судовым двигателем по авторскому свидетельству №385825 (опубликовано 14.06.1973) и способ и устройство управления силовым агрегатом транспортного средства по авторскому свидетельству №2264549 (опубликовано 20.11.2005), позволяющие, помимо согласования задаваемых и заданных значений, также согласовывать связанные с ними качественные или характеризующие некоторые их свойства параметры и/или учитывать их при преобразовании в управляющие воздействия для управления силовым агрегатом, являющиеся аналогами заявляемых способа и устройства.
Известны способ и система управления многодвигательной силовой установкой транспортного средства (прототип) по авторскому свидетельству №612849 (опубликовано 30.06.1978). Способ управления многодвигательной силовой установкой транспортного средства, например судна, обеспечивает управление силовой установкой, которое производят от ручных задатчиков режимов работы каждого из двигателей многодвигательной силовой установки или от одного из них через суммирующее устройство с последующим формированием заданий режимов работы двигателей при их совместной работе и коррекцией общего сигнала управления в зависимости от рассогласования фактической и заданной скорости хода судна.
Система управления многодвигательной силовой установкой транспортного средства, например судна, (по прототипу) содержит установленные на пульте управления задатчики дистанционного управления, суммирующие устройства, пропорционально-интегральный корректор, переключатель автоматизированного и дистанционного режимов управления силовой установкой, устройство сбора информации, контроля параметров и определения готовности и фактического состояния силовой установки, датчики параметров силовой установки и датчик скорости хода транспортного средства, при этом выходы задатчиков дистанционного управления подключены ко второму входу переключателя автоматизированного и дистанционного режимов управления силовой установкой, второй вход пропорционально-интегрального корректора подключен к датчику скорости хода судна, выходы датчиков параметров силовой установки связаны с входами устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки.
Однако эта система не осуществляет способ формирования заданных значений регулируемых параметров многодвигательной силовой установки, не формирует оптимальную конфигурацию силовой установки в зависимости от ее готовности и фактического состояния, не обеспечивает оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, характеризующих реакцию силовой установки на заданные значения регулируемых параметров, допустимые режимы работы и состояние силовой установки. С учетом изложенного система управления многодвигательной силовой установкой транспортного средства (прототип) по авторскому свидетельству №612849 не обеспечивает движение транспортного средства с заданными значениями назначенной скорости хода и режима движения, что не обеспечивает требуемую точность выполнения графика движения транспортного средства по заданному маршруту.
Исходя из вышеизложенного в настоящем изобретении предлагаются меры, которые позволяют обеспечить движение судна с заданными значениями назначенной скорости хода и режима движения по заданному маршруту, обеспечивая требуемую точность выполнения графика движения транспортного средства по заданному маршруту.
Для решения указанной задачи исходя из назначения транспортного средства и выполняемых задач, маршрута движения и навигационных условий в способе управления многодвигательной силовой установкой транспортного средства, например судна, при котором управление силовой установкой производят от ручных задатчиков режимов работы каждого из двигателей силовой установки или от одного из них через суммирующее устройство с последующим формированием заданий режимов работы двигателей при их совместной работе и коррекцией общего сигнала управления в зависимости от рассогласования фактической и заданной скорости хода судна, предлагается управление силовой установкой, которое производят от задатчика назначенной скорости хода и задатчика режима движения транспортного средства, по командам которых определяют расчетную скорость хода и расчетную мощность силовой установки транспортного средства при движении на заданном маршруте, оценивая параметры, определяющие реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки, по результатам анализа которых формируют оптимальную конфигурацию силовой установки и производят расчет заданных значений регулируемых параметров, которые корректируют по фактическим значениям скорости хода транспортного средства, после чего оптимизируют с учетом фактических параметров силовой установки, определяющих реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки, с учетом этого формируют оптимальные управляющие воздействия на регуляторы параметров и исполнительные устройства силовой установки, обеспечивающие оптимальное, безаварийное и безопасное управление транспортным средством и силовой установкой при движении с назначенными скоростью хода и режимом движения на заданном маршруте.
Для реализации способа предлагается в систему управления многодвигательной судовой силовой установкой, имеющую установленные на пульте управления задатчики дистанционного управления, суммирующие устройства, пропорционально-интегральный корректор заданных значений регулируемых параметров силовой установки, переключатель автоматизированного и дистанционного режимов управления силовой установкой, устройство сбора информации, контроля параметров, готовности и фактического состояния силовой установки, датчики параметров силовой установки и датчик скорости хода транспортного средства, при этом выходы задатчиков дистанционного управления подключены ко второму входу переключателя автоматизированного и дистанционного режимов управления силовой установкой, второй вход пропорционально-интегрального корректора подключен к датчику скорости хода судна, выходы датчиков параметров силовой установки связаны с входами устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки, ввести задатчик назначенной скорости хода, задатчик режима движения (в долях от назначенной скорости хода), устройство задания расчетной скорости хода и расчетной мощности силовой установки (в зависимости от назначенной скорости хода и заданного режима движения), устройство формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки, устройство оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки (реакцию силовой установки на заданные значения регулируемых параметров, готовность), при этом выходы задатчиков назначенной скорости хода и режима движения подключены к первому и второму входам устройства задания расчетной скорости хода и расчетной мощности силовой установки, первый и второй входы устройства формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки связаны с выходами устройства задания расчетной скорости хода транспортного средства и расчетной мощности силовой установки и устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки соответственно, а его выход подключен к первому входу суммирующего устройства, второй вход которого связан с выходом пропорционально-интегрального корректора заданных значений регулируемых параметров силовой установки, первый и второй входы которого, в свою очередь, подключены ко второму выходу устройства задания расчетной скорости хода судна и расчетной мощности силовой установки и к выходу датчика скорости хода соответственно, выход суммирующего устройства связан с первым входом устройства оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки, второй вход которого связан с выходом устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки, а выход через переключатель автоматизированного и дистанционного режимов управления силовой установкой соединен с входами регуляторов параметров и исполнительных устройств силовой установки, второй вход переключателя автоматизированного и дистанционного режимов управления силовой установкой связан с задатчиками дистанционного управления, выходы датчиков параметров силовой установки связаны с входами устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки.
На чертеже изображена схема системы управления многодвигательной силовой установкой транспортного средства, например, судна.
Система содержит установленные на пульте 1 задатчик дистанционного управления 2, задатчик назначенной скорости хода 3, задатчик режима движения 4, выполненные, например, на кнопочной клавиатуре, устройство задания расчетной скорости хода судна и расчетной мощности силовой установки 5, устройство сбора информации, контроля параметров, готовности и фактического состояния силовой установки 6, устройство формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки 7, реализованные, например, на ЭВМ верхнего уровня (командная ЭВМ с использованием, например, операционной системы QNX), пропорционально-интегральный корректор заданных значений регулируемых параметров силовой установки 8, суммирующие устройства 9, устройство оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки 10, реализованные на ЭВМ нижнего уровня (исполнительная ЭВМ с использованием, например, операционной системы QNX), переключатель автоматизированного и дистанционного режимов управления силовой установкой 11, датчики параметров силовой установки 12 (например, датчики температуры, давления), датчик скорости хода 13. Выходы задатчиков назначенной скорости хода судна 3 и режима движения 4 подключены к первому и второму входам устройства задания расчетной скорости хода и расчетной мощности силовой установки 5, первый и второй входы устройства формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки 7 связаны с выходами устройства задания расчетной скорости хода и расчетной мощности силовой установки 5 и устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки 6 соответственно, а его выход подключен к первому входу суммирующего устройства 9, второй вход которого связан с выходом пропорционально-интегрального корректора заданных значений регулируемых параметров силовой установки 8, первый и второй входы которого, в свою очередь, подключены ко второму выходу устройства задания расчетной скорости хода и расчетной мощности силовой установки 5 и к выходу датчика скорости хода 13 соответственно, выход суммирующего устройства 9 связан с первым входом устройства оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки 10, второй вход которого связан с выходом устройства сбора информации, контроля готовности и фактического состояния силовой установки 6, а выход через переключатель автоматизированного и дистанционного режимов управления 11 соединен с входами регуляторов параметров и исполнительных устройств многодвигательной силовой установки 14, второй вход переключателя автоматизированного и дистанционного режимов управления силовой установкой 11 связан с задатчиками дистанционного управления 2, выходы датчиков параметров силовой установки 12 связаны с входами устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки 6.
При движении по заданному маршруту в соответствии с назначением и задачами, выполняемыми транспортным средством, с помощью установленного на пульте управления 1 задатчика назначенной скорости хода 3 вводят значение назначенной скорости хода, а с помощью задатчика режима движения 4 задают режим движения транспортного средства в долях от назначенной скорости хода. Таким образом, задается режим движения транспортного средства на маршруте с учетом назначения судна, навигационной обстановки, характера выполняемой задачи и других факторов, влияющих на качество и надежность ее выполнения.
В соответствии с заданными значениями назначенной скорости хода и режима движения транспортного средства устройством задания расчетной скорости хода судна и расчетного значения мощности силовой установки 5 определяется расчетная скорость хода и требуемая для выполнения заданного режима мощность силовой установки. Устройством сбора информации, контроля параметров, готовности и фактического состояния силовой установки 6 определяются параметры, характеризующие реакцию силовой установки на заданные значения регулируемых параметров, готовность и фактическое состояние силовой установки. На основании анализа параметров и фактического состояния силовой установки, ее готовности к работе в соответствии с назначенной скоростью и расчетной мощностью устройством 7 формируется оптимальная конфигурация силовой установки и определяются заданные значения регулируемых параметров силовой установки, которые корректируются пропорционально-интегральным корректором заданных значений регулируемых параметров 8 в зависимости от отклонения фактической скорости хода, измеряемой датчиком скорости хода 13, от расчетного значения, определяемого устройством задания расчетной скорости хода и расчетной мощности силовой установки 5. Коррекция осуществляется посредством суммирующих устройств 9. Откорректированные заданные значения регулируемых параметров силовой установки подаются в устройство оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих реакцию силовой установки на заданные значения регулируемых параметров, допустимые режимы работы и состояния силовой установки 10, которое осуществляет оптимальное согласование заданных значений параметров силовой установки с указанными параметрами и с учетом этого формируются оптимальные управляющие воздействия на регуляторы параметров и исполнительные устройства силовой установки 14 через переключатель автоматизированного и дистанционного режимов управления силовой установкой 11 (управление им может совершаться с задатчиков дистанционного управления 2), обеспечивающие оптимальное, безаварийное и безопасное управление транспортным средством 15 (при этом значения параметров силовой установки поступают на датчики параметров силовой установки 12), движение транспортного средства с заданными значениями назначенной скорости хода и режима движения, обеспечивая при этом требуемую точность выполнения графика движения транспортного средства по заданному маршруту.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления энергоустановкой беспилотного гибридного автомобиля | 2019 |
|
RU2733599C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕГУЛИРУЕМОЙ ВОССТАНАВЛИВАЮЩЕЙ СИЛОЙ НА ПЕДАЛИ АКСЕЛЕРАТОРА АВТОМОБИЛЯ И АВТОМОБИЛЬ | 2015 |
|
RU2700912C2 |
| Многодвигательный электропривод агрегата непрерывной обработки материала | 1980 |
|
SU1064850A1 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Устройство для оценки мастерства управления транспортным средством | 1988 |
|
SU1538179A1 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| Устройство управления движением транспортного средства | 1990 |
|
SU1837328A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ИЛИ УПРАВЛЕНИЯ СИЛОЙ АМОРТИЗАЦИИ РЕГУЛИРУЕМЫХ АМОРТИЗАТОРОВ В АВТОМОБИЛЯХ, В ЧАСТНОСТИ В АВТОМОБИЛЯХ ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2720858C2 |
| Устройство управления движением и маневрированием группы роботизированных и автономных наземных транспортных средств на основе применения многосвязной адаптивной системы управления | 2020 |
|
RU2753778C1 |
| СПОСОБ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО МАРШРУТУ СЛЕДОВАНИЯ | 1999 |
|
RU2178587C2 |
Изобретение относится к области автоматизации силовых установок транспортных средств, в частности к многодвигательным силовым установкам, установленным, например, на судах. Управление силовой установкой производят от задатчика назначенной скорости хода и задатчика режима движения транспортного средства. По командам задатчиков определяют расчетную скорость хода и расчетную мощность силовой установки транспортного средства при движении на заданном маршруте. Оценивают параметры, определяющие реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки. По результатам анализа формируют оптимальную конфигурацию силовой установки и производят расчет заданных значений регулируемых параметров. Параметры корректируют по фактическим значениям скорости хода транспортного средства. После чего оптимизируют с учетом фактических параметров силовой установки, определяющих реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки. С учетом этого формируют оптимальные управляющие воздействия на регуляторы параметров и исполнительные устройства силовой установки. Достигается оптимальное, безаварийное и безопасное управление транспортным средством и силовой установкой при движении с назначенными скоростью хода и режимом движения на заданном маршруте, обеспечивая требуемую точность выполнения графика движения транспортного средства по заданному маршруту. 2 н.п. ф-лы, 1 ил.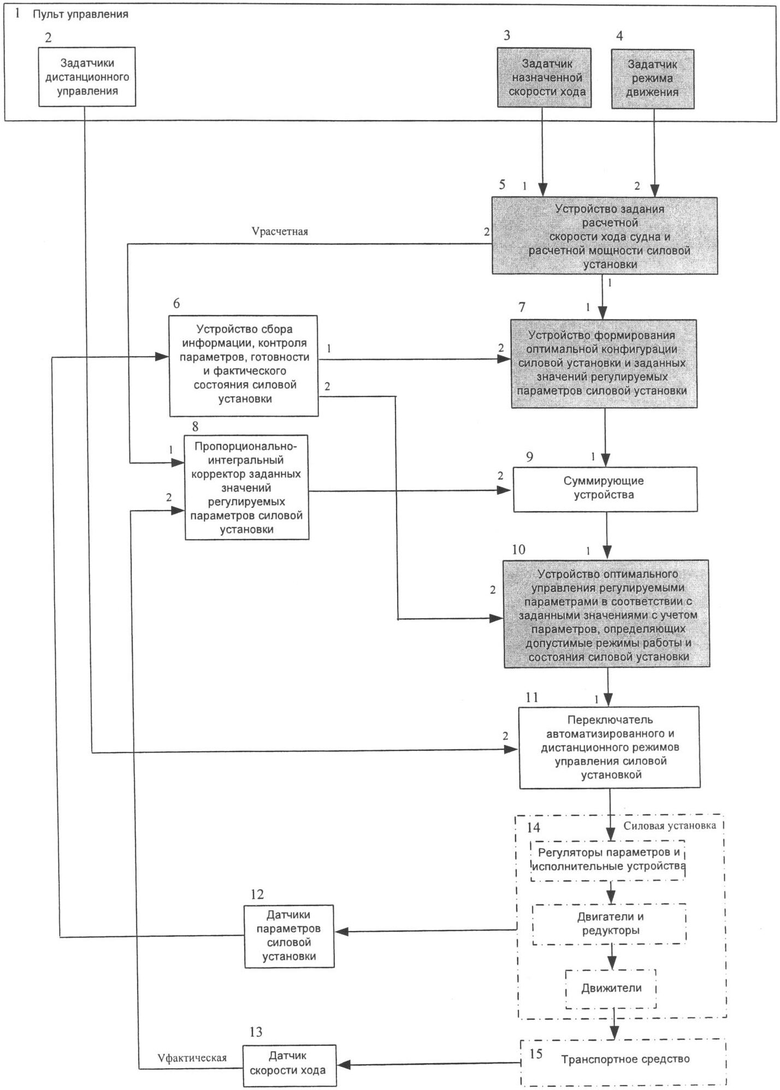
1. Способ управления многодвигательной силовой установкой транспортного средства, при котором управление силовой установкой производят от ручных задатчиков режимов работы каждого из двигателей многодвигательной силовой установки или от одного из них через суммирующее устройство с последующим формированием заданий режимов работы двигателей при их совместной работе и коррекцией общего сигнала управления в зависимости от рассогласования фактической и заданной скоростей хода транспортного средства, отличающийся тем, что управление силовой установкой производят от задатчика назначенной скорости хода и задатчика режима движения транспортного средства, по командам которых определяют расчетную скорость хода и расчетную мощность силовой установки транспортного средства при движении на заданном маршруте, оценивают параметры, определяющие реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки, по результатам анализа которых формируют оптимальную конфигурацию силовой установки и производят расчет заданных значений регулируемых параметров, которые корректируют по фактическим значениям скорости хода транспортного средства и после чего оптимизируют с учетом фактических параметров силовой установки, определяющих реакцию силовой установки на заданные значения регулируемых параметров, готовность, режимы работы и фактическое состояние силовой установки, с учетом этого формируют оптимальные управляющие воздействия на регуляторы параметров и исполнительные устройства силовой установки, обеспечивающие оптимальное, безаварийное и безопасное управление транспортным средством и силовой установкой при движении с назначенными скоростью хода и режимом движения на заданном маршруте.
2. Система управления многодвигательной силовой установкой транспортного средства, содержащая установленные на пульте управления задатчики дистанционного управления, суммирующие устройства, пропорционально-интегральный корректор заданных значений регулируемых параметров силовой установки, переключатель автоматизированного и дистанционного режимов управления силовой установкой, устройство сбора информации, контроля параметров, готовности и фактического состояния силовой установки, датчики параметров силовой установки и датчик скорости хода транспортного средства, при этом выходы задатчиков дистанционного управления подключены ко второму входу переключателя автоматизированного и дистанционного режимов управления силовой установкой, второй вход пропорционально-интегрального корректора подключен к датчику скорости хода транспортного средства, выходы датчиков параметров силовой установки поданы на входы устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки, отличающаяся тем, что содержит задатчик назначенной скорости хода, задатчик режима движения (в долях от назначенной скорости хода), устройство задания расчетной скорости хода и расчетной мощности силовой установки (в зависимости от назначенной скорости хода и заданного режима движения), устройство формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки, устройство оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки (реакцию силовой установки на заданные значения регулируемых параметров, готовность), при этом выходы задатчиков назначенной скорости хода и режима движения подключены к первому и второму входам устройства задания расчетной скорости хода и расчетной мощности силовой установки, первый и второй входы устройства формирования оптимальной конфигурации силовой установки и заданных значений регулируемых параметров силовой установки связаны с выходами устройства задания расчетной скорости хода транспортного средства и расчетной мощности силовой установки и устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки соответственно, а его выход подключен к первому входу суммирующего устройства, второй вход которого связан с выходом пропорционально-интегрального корректора заданных значений регулируемых параметров силовой установки, первый и второй входы которого, в свою очередь, подключены ко второму выходу устройства задания расчетной скорости хода транспортного средства и расчетной мощности силовой установки и к выходу датчика скорости хода соответственно, выход суммирующего устройства подан на первый вход устройства оптимального управления регулируемыми параметрами в соответствии с заданными значениями с учетом параметров, определяющих допустимые режимы работы и состояния силовой установки, второй вход которого связан с выходом устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки, а выход через переключатель автоматизированного и дистанционного режимов управления силовой установкой соединен с входами регуляторов параметров и исполнительных устройств многодвигательной силовой установки, второй вход переключателя автоматизированного и дистанционного режимов управления силовой установкой связан с задатчиками дистанционного управления, выходы датчиков параметров силовой установки поданы на входы устройства сбора информации, контроля параметров, готовности и фактического состояния силовой установки.
| Система управления многовальной судовой силовой установкой | 1976 |
|
SU612849A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2264549C2 |
| US 5491635 A, 13.02.1996 | |||
| Устройство для слива сгущенного молока из консервной банки | 1959 |
|
SU130794A1 |

