СП
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для выверки колес мостового крана | 1973 |
|
SU485058A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС | 2008 |
|
RU2375295C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2412105C1 |
| т-еСОЮЗНАЯАвторыинститут машииостроения | 1973 |
|
SU377289A1 |
| Подвесной грузоподъемный кран | 1976 |
|
SU652089A1 |
| Устройство для выверки колес крана | 1977 |
|
SU673591A1 |
| СПОСОБ ДИАГНОСТИКИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВОЙ ЧАСТИ МОСТОВЫХ КРАНОВ | 2008 |
|
RU2382347C1 |
| Ходовая часть мостового крана | 1985 |
|
SU1606435A1 |
| Приспособление для контроля положения ходовых колес | 1978 |
|
SU893814A1 |
| Мостовой кран | 1990 |
|
SU1744046A1 |
Изобретение относится к подъемно- транспортному машиностроению, а именно -$. гдеУ1У2к способам выверки колес крана. Цель изобретения - повышение точности. Согласно способу угол перекоса колеса определяют Yi - Y по формуле /3 arctg расстояния от центров колес до базовой линии, перпендикулярной продольной оси подкранового пути; L - база соосно расположенных колес; /3 - угол наклона плоскости колеса к базовой линии, параллельной продольной оси подкранового пути. Перед выверкой колес разгружают последние от действия внешних боковых сил. 1 ил.
Изобретение относится к подьемно- транспортному машиностроению, а именно к способам выверки колес ходовой части кранов.
Цель изобретения - повышение точности.
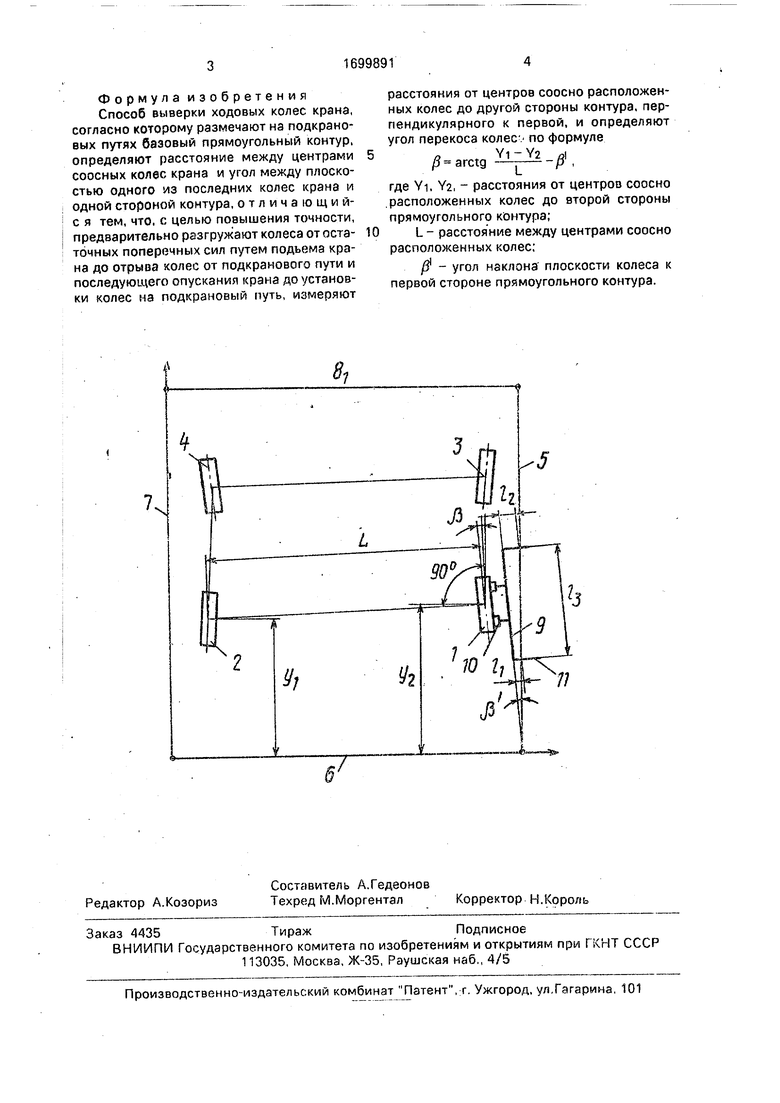
На чертеже приведена схема расположения колес крана, вид сверху,
Ходовая часть крана содержит колеса 1-4. Вдоль подкранового пути расположена первая базовая линия 5, а перпендикулярно к ней - вторая базовая линия 6.
Для выверки всех колес дополнительно строятся базовые линии 7 и 8. Кронштейн 9 с магнитами 10 и линейками 11 использует- ся при выверке колес. Перед выверкой колес 1-4 разгружают последние от действия внешних боковыхсил, для чего приподнимают поочередно колеса над подкрановым путем, воздействуя на ходовую часть вертикально направленной силой, амплитуда которой увеличивается ,со отрыва колеса от пути.
Согласно способу выверки колес прикладывают кронштейн 9 к колесу 1 и по пересечению линий 5 с линейками 11 судят угле наклона плоскости колеса 1 к базовой линии
0 arctg ilfJi ..
13
где И, 12 - показания линеек 11; з - база кронштейна 9. Измеряют расстояние между центрами колес 1 и 2, а затем - расстояния между центрами колес 1 и 2 и линией 6. Определяют угол перекоса колеса 1 по формуле
DS
ю ю
00 Ч)
/J-arctg XllYZ-,
где Yi, Y2 - расстояния между центрами колес 1 и 2 и базовой линией 6;
L - расстояние между центрами соосно расположенных колес.
Формула изобретения Способ выверки ходовых колес крана, согласно которому размечают на подкрановых путях базовый прямоугольный контур, определяют расстояние между центрами соосных колес крана и угол между плоскостью одного из последних колес крана и одной стороной контура, отличающий- с я тем, что. с целью повышения точности, предварительно разгружают колеса от остаточных поперечных сил путем подъема крана до отрыва колес от подкранового пути и последующего опускания крана до установки колес ма подкрановый путь, измеряют
расстояния от центров соосно расположенных колес до другой стороны контура, перпендикулярного к первой, и определяют угол перекоса колес по формуле
/ arctg -/3 ,
где Yi. Y2, - расстояния от центров соосно расположенных колес до второй стороны прямоугольного контура;
L - расстояние между центрами соосно расположенных колес;
$ - угол наклона плоскости колеса к первой стороне прямоугольного контура.
5
| Григоренко А | |||
| Г | |||
| и др | |||
| Технический контроль при эксплуатации подкрановых сооружений | |||
| М.: Металлургия, 1977 | |||
| с | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
