Область изобретения
Объектом настоящего изобретения является способ ограничения угла отклонения руля летательного аппарата в определенных условиях полета, в частности, когда происходит боковой снос летательного аппарата и отклонение его руля производится с максимальным углом отклонения. Объектом настоящего изобретения является также система для применения этого способа.
Изобретение находит свое применение в области авиации и, в частности, в области управления рулем летательного аппарата.
Уровень техники
В летательном аппарате руль направления является подвижным щитком, установленным в киле летательного аппарата и управляемым из кабины летчика для изменения направления летательного аппарата. Киль составляет относительно большую поверхность летательного аппарата, основной ролью которой является обеспечение путевой устойчивости летательного аппарата. Киль выполнен с возможностью восприятия усилий, которые могут быть относительно большими. Вместе с тем, эти усилия не должны превышать определенную нагрузку, которая может привести к разрыву киля. Эти усилия зависят от условий полета летательного аппарата и, в частности, от скорости летательного аппарата. Также для ограничения этих нагрузок на руль существует система, установленная на большинстве летательных аппаратов и позволяющая ограничивать угол отклонения руля в определенных условиях полета, то есть ограничить допустимый угол отклонения руля. Это ограничение достигается благодаря упорам, расположенным с одной и с другой стороны руля, положение которых управляется при помощи силовых цилиндров. Ограничение угла отклонения руля напрямую связано со скоростью летательного аппарата. Так, чем быстрее летит летательный аппарат и чем больше уменьшен угол отклонения руля, тем ближе упоры располагаются к рулю. И, наоборот, чем меньше скорость летательного аппарата, тем больше допустимый угол отклонения руля и, следовательно, тем упоры дальше расположены от руля.
При нормальных условиях полета летательного аппарата руль направления используется при посадке для выравнивания летательного аппарата с посадочной полосой и при рулении летательного аппарата на земле. В этих двух случаях летательный аппарат движется на небольшой скорости. Следовательно, допустимый угол отклонения руля может быть большим.
В ненормальных условиях полета летательного аппарата, например при неисправности двигателя, руль направления можно использовать, чтобы компенсировать асимметрию, появляющуюся в момент потери мощности двигателя. Действительно, когда один двигатель перестает работать, происходит боковой снос летательного аппарата, и он летит косо, то есть летательный аппарат больше не находится в оси полета. Тогда необходимо воздействовать на руль направления для возврата летательного аппарата в ось полета. В этих условиях важно, чтобы допустимый угол отклонения руля был достаточно большим для выравнивания положения самолета.
Классическая система ограничения угла отклонения руля предусмотрена, чтобы пилот мог компенсировать результаты такого отказа двигателя. Иначе говоря, классическое ограничение рассчитывают таким образом, чтобы оставить пилоту достаточно власти, чтобы он смог компенсировать асимметрию, появившуюся в результате отказа двигателя.
Вместе с тем, эта классическая система не учитывает другие ненормальные ситуации, которые могут потребовать управления углом отклонения руля.
Действительно, ничто не мешает пилоту произвести последовательно несколько маневров управления отклонением руля в противоположных направлениях при углах, достигающих максимально допустимое отклонение. Например, если пилот управляет первым отклонением руля в первом направлении по первой причине, затем следует второе отклонение руля в противоположном направлении по другой причине, затем - третье отклонение руля в первом направлении, причем с максимальными углами отклонения руля, то усилия, действующие на киль, могут стать такими большими, что приведут к сотрясению всей конструкции летательного аппарата.
В другом примере ненормальных условий полета, если происходит боковой снос летательного аппарата в результате маневра управления отклонением руля или вследствие отказа двигателя, летательный аппарат летит косо. В этом случае на него действует боковой ветер. Если в этот момент пилот управляет отклонением руля с максимальным углом, чтобы вернуться в ось полета, руль обладает наибольшей парусностью. На руль начинают действовать большие нагрузки. Если пилот управляет новым отклонением руля в противоположном направлении с максимальным углом, усилия, действующие на киль, могут превысить нагрузки, на которые рассчитан летательный аппарат.
Усилия, действующие на киль, могут достичь и даже превысить пределы, предусмотренные самой конструкцией летательного аппарата. В самых сложных ситуациях киль может разорваться под действием усилий или нагрузок и привести к падению летательного аппарата.
Сущность изобретения
Задачей настоящего изобретения является устранение недостатков описанных выше технических решений. В этой связи настоящим изобретением предлагаются способ и система, позволяющие повысить безопасность летательного аппарата путем предотвращения маневров такого типа, то есть последовательных отклонений руля в противоположных направлениях с максимальными углами отклонения. Для этого способ и система данного изобретения обеспечивают ограничение допустимого угла отклонения руля в определенных условиях полета. Иначе говоря, изобретение предлагает уменьшение возможности управления рулем для пилота, чтобы ограничить воздействие усилий на киль, когда самолет подвергается боковому сносу и отклонение руля производится в противоположном направлении до максимально допустимого угла.
Более точно, объектом настоящего изобретения является способ ограничения угла отклонения руля летательного аппарата, содержащий операцию определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата, отличающийся тем, что содержит следующие операции:
- детектирование конфигурации бокового сноса летательного аппарата, сопровождаемой первой командой на отклонение руля с максимальным углом отклонения и в первом направлении,
- применение ограничения максимально допустимого угла отклонения.
Этот способ может содержать один или несколько следующих отличительных признаков:
- детектирование конфигурации бокового сноса летательного аппарата состоит в детектировании отклонения руля с максимальным углом отклонения и во втором направлении, противоположном первому направлению,
- детектирование конфигурации бокового сноса летательного аппарата состоит в детектировании неравного нулю бокового ускорения летательного аппарата.
Объектом настоящего изобретения является также система для применения этого способа. Этой системой является система ограничения угла отклонения руля летательного аппарата, содержащая:
- устройство получения данных о скорости летательного аппарата,
- устройство определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата,
- устройство получения данных о текущем положении руля,
отличающаяся тем, что содержит:
- устройство для детектирования конфигурации бокового сноса летательного аппарата и команды на отклонение руля с максимально допустимым углом поворота и в первом направлении, и
- устройство для ограничения значения максимально допустимого угла отклонения.
Эта система может содержать один или несколько следующих отличительных признаков:
- устройство для детектирования бокового сноса является логической схемой, проверяющей, имеют ли два последовательных отклонения руля, называемых дублетом, противоположные направления и максимально допустимые углы отклонения,
- устройство для детектирования бокового сноса содержит датчик бокового ускорения,
- устройство для детектирования бокового сноса содержит логическую схему, проверяющую наличие команды на отклонение с максимальным углом отклонения, когда обнаруженное боковое ускорение не равно нулю,
- логическая схема содержит два канала детектирования, соединенные вентилем И,
- каждый канал детектирования содержит вентиль И, устройство задержки и триггер,
- ограничение максимально допустимого угла отклонения достигается путем изменения длины силового цилиндра, образующего упор руля.
Краткое описание чертежей
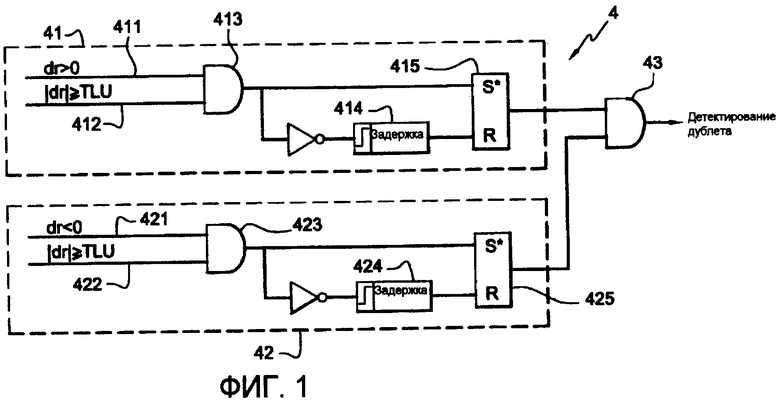
Фиг.1 - логическая схема детектирования дублета, обеспечивающая детектирование критической конфигурации.
Фиг.2 - функциональная схема системы ограничения угла отклонения руля согласно первому варианту воплощения изобретения.
Фиг.3 - вариант системы в соответствии с настоящим изобретением.
Фиг.4 - второй вариант воплощения системы в соответствии с настоящим изобретением.
Подробное описание вариантов воплощения изобретения
Объектами настоящего изобретения являются способ и система, позволяющие быстро уменьшить допустимый угол отклонения руля, когда летательный аппарат находится в конфигурации бокового сноса и когда отклонение с максимальным углом производится в направлении, противоположном текущему положению руля, то есть положению, в котором находится руль во время бокового сноса. В дальнейшем эта конфигурация будет называться критической конфигурацией.
Допустимый угол отклонения соответствует максимальному отклонению, которое может выдержать руль в ответ на команду отклонения. Этот угол ограничен двумя упорами, расположенными с одной и другой стороны от руля. Положение этих упоров диктуется устройством, называемым устройством RTLU (от Rudder Travel Limitation Unit в англосаксонской терминологии).
Таким образом, изобретение требует детектирования критической конфигурации с детектированием бокового сноса, детектирование максимального значения RTLU, то есть значения максимально допустимого угла отклонения, и детектирование текущего значения угла отклонения, соответствующего текущему положению руля. Однако на большинстве летательных аппаратов информацию о боковом сносе летательного аппарата получить не представляется возможным.
Поэтому для определения наличия бокового сноса настоящим изобретением предлагается детектировать:
- либо применение двух последовательных команд отклонения с максимальным углом отклонения в одном направлении, затем в другом направлении,
- либо наличие бокового ускорения летательного аппарата.
Эти два варианта детектирования позволяют сделать вывод, что происходит боковой снос летательного аппарата.
Более точно, способ в соответствии с настоящим изобретением состоит в том, чтобы определить, что летательный аппарат подвергается боковому сносу, при помощи одного из описанных выше вариантов, и что руль достиг своего максимального угла отклонения и поменял направление. Как только эти два факта установлены, способ согласно данному изобретению, по умолчанию, считает, что летательный аппарат находится в критической конфигурации и что существует возможный риск превышения предельных нагрузок. В этом случае способ в соответствии с настоящим изобретением состоит в уменьшении максимально допустимого угла отклонения руля, чтобы убедиться, что усилия, действующие на руль, не могут превысить предельную нагрузку, на которую рассчитан летательный аппарат. Таким образом, ограничивается возможность пилота воздействовать на руль и повышается безопасность летательного аппарата.
Описанный выше способ осуществляется системой в соответствии с настоящим изобретением. Эта система содержит:
- устройство 3 получения данных о скорости летательного аппарата,
- устройство 1 определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата,
- устройство 2 получения данных о текущем положении руля.
Она содержит также электронную схему для детектирования критической конфигурации и определения предельного значения угла отклонения руля, а также коммуникационные шины, которые обеспечивают связь между различными вычислителями летательного аппарата и схемой детектирования для передачи в упомянутую схему данных, поступающих от вычислителей и необходимых для детектирования критической конфигурации.
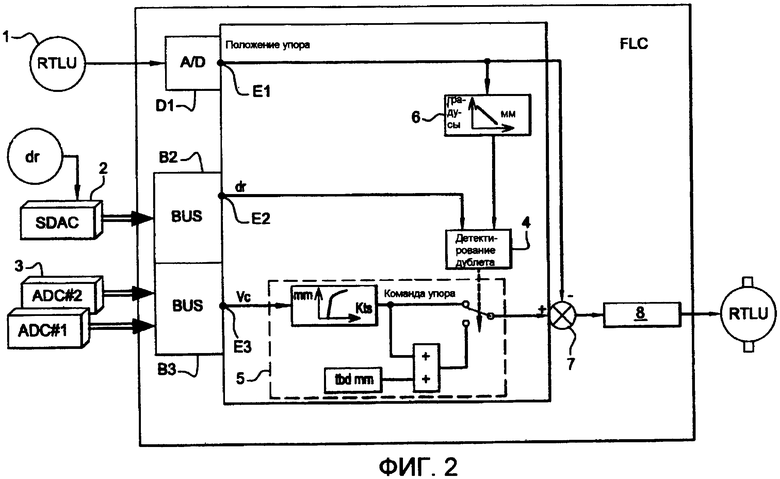
На фиг.2 показан пример системы в соответствии с настоящим изобретением с электронной схемой, позволяющей детектирование критической конфигурации и ограничение угла отклонения руля. Эта схема позволяет применить первый вариант воплощения изобретения, согласно которому боковой снос летательного аппарата определяется при применении двух последовательных команд отклонения с максимальным углом отклонения в одном направлении, затем в другом направлении. Одно из этих направлений называют первым направлением, а другое направление называют вторым направлением. Таким образом, схема, показанная на фиг.2, позволяет детектировать две последовательные команды на отклонение в противоположных направлениях до упора. Для этого упомянутая схема на входе Е1 получает положение упора руля, то есть значение максимально допустимого угла отклонения, для данной скорости полета летательного аппарата. Это значение поступает из блока RTLU 1, например, в аналоговом виде. После этого демодулятор D1 преобразует его в цифровые данные, которые затем вводятся в схему в соответствии с настоящим изобретением. На входе Е2 схема получает значение dr текущего положения руля, то есть значение угла между реальным положением руля и нерабочим положением упомянутого руля. Реальное положение, в котором находится руль в момент вычисления, иначе говоря, угол отклонения руля. Это значение поступает через коммуникационную шину В2 типа ARINC 429 от вычислителя 2, управляющего положением руля, например концентратора сбора данных SDAC (System Data Acquisition Concentrator). На своем входе Е3 схема получает данные о скорости летательного аппарата. Эти данные поступают через шину В3 от вычислителей 3, управляющих скоростью летательного аппарата, например вычислителей ADC (Air Data Computer) или ADIRU.
Эта схема обеспечивает сравнение между значением RTLU и значением dr текущего положения руля. Эти два значения являются значениями, выраженными в градусах. Это сравнение осуществляется схемой 4 детектирования дублета, детально показанной на фиг.1.
Более точно, на фиг.1 показан пример логической схемы, обеспечивающей детектирование дублета, то есть детектирование двух последовательных команд на отклонение руля с максимальными углами отклонения и в противоположных направлениях. Эта схема 4 детектирования дублета содержит первый канал детектирования 41 и второй канал детектирования 42. Эти два канала детектирования 41 и 42 соединены с логическим вентилем И 43.
Первый канал 41 содержит вентиль И 413, который принимает значение 1, если направление отклонения dr руля является положительным (вход 411 схемы 4) и абсолютное значение отклонения dr превышает или равно значению RTLU (вход 412 схемы 4). Этот канал 41 содержит устройство 414 задержки, которое применяет определенную задержку для логического значения, полученного на выходе вентиля И 413. Эта задержка соответствует, по меньшей мере, установленному времени между командой на отклонение руля и реакцией руля, то есть изменением положения руля. Эта задержка составляет примерно 5-6 секунд. Канал 41 дополнительно содержит триггер 415, который получает, с одной стороны, логическое значение непосредственно из вентиля И и, с другой стороны, логическое значение, поступающее из устройства 414 задержки. Этот триггер 415 позволяет заблокировать логическое значение 1 или 0, полученное от вентиля И 413. Таким образом, канал 41 схемы сохраняет полученное логическое значение на выходе первого вентиля И 413 в течение времени 5-6 секунд, чтобы убедиться, что руль имел достаточно времени для реагирования на команду отклонения.
Таким образом, канал 41 детектирует наличие отклонения с максимальным углом и в первом направлении.
Второй канал 42 схемы 4 детектирования дублета содержит вентиль И 423, который принимает значение 1, когда направление отклонения руля является отрицательным (вход 421 схемы 4) и абсолютное значение отклонения dr превышает или равно значению RTLU (вход 422 схемы 4). Этот канал 42 содержит устройство 424 задержки, которое применяет для полученного логического значения на выходе вентиля И 423 такую же задержку, что и устройство 414 задержки. Канал 42 дополнительно содержит триггер 425, который позволяет заблокировать логическое значение 1 или 0, полученное от вентиля И 423. Таким образом, канал 42 схемы сохраняет полученное логическое значение на выходе первого вентиля И 423 в течение времени 5-6 секунд, чтобы убедиться, что руль имел достаточно времени реагирования на команду отклонения.
Таким образом, канал 42 детектирует наличие отклонения с максимальным углом и во втором направлении.
Каждый из каналов 42 соединен на выходе с логическим вентилем И 43. Когда вентиль И 43 получает логическое значение 1 на каждом из своих входов, это значит, что детектированы две команды отклонения в противоположных направлениях и с максимальными углами. Логическое значение 1 передается на выходе схемы 4 детектирования дублета. В противоположном случае на выход схемы 4 передается логическое значение 0.
Когда выход вентиля И 43 находится в значении 1, это значит, что детектирована критическая конфигурация. В этом случае схема, показанная на фиг.2, обеспечивает ограничение значения RTLU. Схема управления упором 5, связанная с сумматором 7 и с силовым контуром 8, обеспечивает ограничение значения RTLU, то есть допустимого ограниченного угла отклонения.
Фиг.2 описана с учетом того, что значение RTLU является угловым значением, выдаваемым непосредственно блоком RTLU 1. Однако следует отметить, что упор руля выполнен при помощи силового цилиндра механического типа. Следовательно, информация, поступающая из блока RTLU 1, является метрическим значением, например, выраженным в миллиметрах. Схема, показанная на фиг.2, содержит элементы преобразования метрических величин в угловые величины, в частности, элемент 6 для преобразования миллиметров в градусы. Таким образом, ограничение допустимого угла отклонения соответствует удлинению силового цилиндра в миллиметрах: чем больше выдвинут силовой цилиндр, тем больше ограничен допустимый угол отклонения.
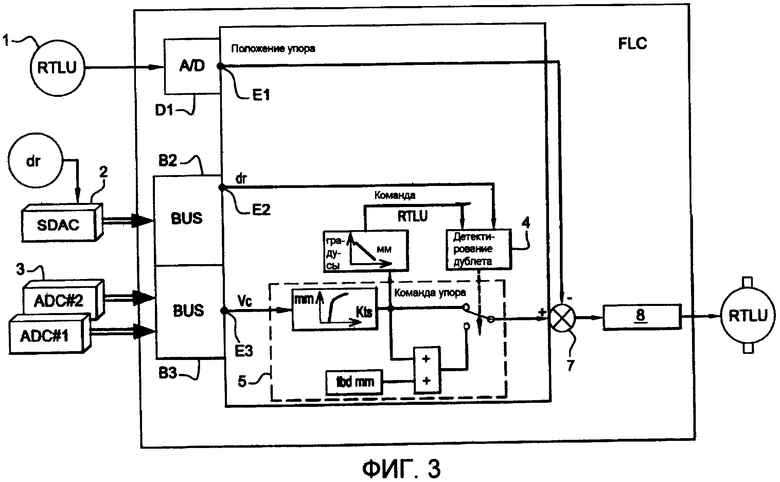
В примере, показанном на фиг.2, критическая конфигурация детектируется путем сравнения углов отклонения руля. На фиг.3 показан пример схемы, позволяющей детектировать критическую конфигурацию путем сравнения текущего положения руля и команды положения RTLU. Иначе говоря, с этой схемой нет необходимости ждать нужного положения RTLU. Используют непосредственно команду RTLU. Таким образом, на входе схема 4 детектирования дублета получают значение положения руля и значение команды RTLU, поступающее от схемы 5 управления упором.
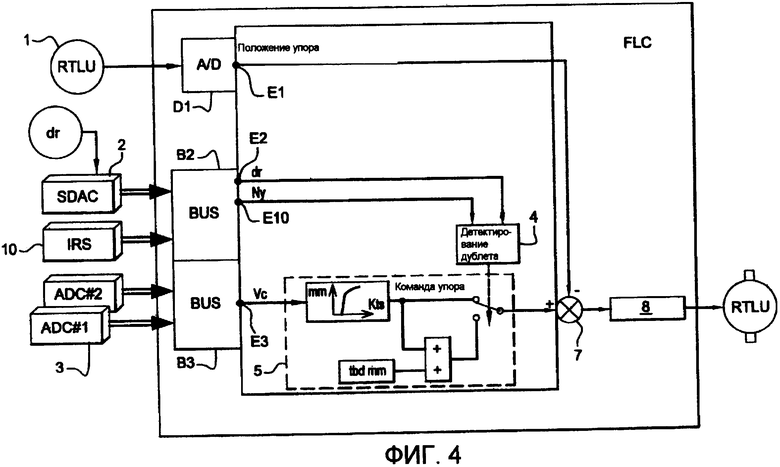
Согласно второму варианту воплощения изобретения, считается, что летательный аппарат подвергается боковому сносу, начиная с момента, когда появляется значение его бокового ускорения, не равное нулю. Действительно, на большинстве летательных аппаратов по бортам летательного аппарата устанавливают датчики скорости. Эти датчики позволяют определить значение бокового ускорения летательного аппарата. Если это боковое ускорение не равно нулю, значит имеет место боковой снос. А если обнаружен боковой снос и детектирована также команда на отклонение руля с максимальным углом отклонения, значит летательный аппарат находится в критической конфигурации. Пример схемы, позволяющий применять этот вариант выполнения, показан на фиг.4.
Эта схема, показанная на фиг.4, идентична схеме, показанной на фиг.2, за исключением того, что касается некоторых данных, получаемых на входе схемы, и что касается схемы детектирования дублета. Более точно, согласно этому варианту воплощения, схема содержит вход Е10, получающий значение Ny бокового ускорения летательного аппарата. Это значение Ny поступает из вычислителя 10 через шину В2.
В этом варианте воплощения схема детектирования дублета 4 содержит первый канал, который проверяет, является ли Ny не равным нулю и находится ли руль в первом направлении, и второй канал, который проверяет наличие отклонения руля во втором направлении с максимальным углом отклонения. Если логическими значениями обоих каналов является 1, считается, что летательный аппарат находится в критической конфигурации.
Каким бы ни был вариант воплощения, систему в соответствии с настоящим изобретением можно установить в вычислителе управления полетом летательного аппарата, например в вычислителе FLC (Field Limitation Computer). Этот компьютер FLC имеет преимущество в том, что обеспечивает, в частности, определение и команду RTLU; таким образом, он обязательно должен располагать значением RTLU.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ РУЛЯ НАПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2397111C2 |
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| Способ и устройство для защиты максимальной подъемной силы воздушного судна | 2016 |
|
RU2731194C2 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757549C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| Способ образования подъемной силы, аэроплан, способ взлета и посадки | 2002 |
|
RU2223891C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах управления летательными аппаратами. Технический результат - повышение надежности. Для достижения данного результата введены средства определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата, операции детектирования конфигурации бокового сноса летательного аппарата, сопровождаемой первой командой на отклонение руля с максимальным углом отклонения и в первом направлении, операции ограничения максимально допустимого угла отклонения. 3 н. и 7 з.п. ф-лы, 4 ил.
1. Способ ограничения угла отклонения руля летательного аппарата, содержащий операцию определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата, отличающийся тем, что содержит следующие операции:
детектирование конфигурации бокового сноса летательного аппарата, сопровождаемое первой командой на отклонение руля с максимальным углом отклонения и в первом направлении,
применение ограничения максимально допустимого угла отклонения.
2. Способ по п.1, отличающийся тем, что детектирование конфигурации бокового сноса летательного аппарата состоит в детектировании отклонения руля с максимальным углом отклонения и во втором направлении.
3. Способ по п.1, отличающийся тем, что детектирование конфигурации бокового сноса летательного аппарата состоит в детектировании не равного нулю бокового ускорения летательного аппарата.
4. Система ограничения угла отклонения руля летательного аппарата, содержащая:
устройство получения данных о скорости летательного аппарата,
устройство определения максимально допустимого угла отклонения в зависимости от скорости летательного аппарата,
устройство получения данных о текущем положении руля, отличающаяся тем, что содержит:
устройство для детектирования конфигурации бокового сноса летательного аппарата и команды на отклонение руля с максимально допустимым углом отклонения и в первом направлении, и
устройство для ограничения значения максимально допустимого угла отклонения.
5. Система по п.4, отличающаяся тем, что устройство для детектирования бокового сноса является логической схемой, проверяющей, имеют ли два последовательных отклонения руля противоположные направления и максимально допустимые углы отклонения.
6. Система по п.4, отличающаяся тем, что устройство для детектирования бокового сноса содержит датчик бокового ускорения.
7. Система по п.6, отличающаяся тем, что устройство для детектирования бокового сноса содержит логическую схему, проверяющую наличие команды на отклонение с максимальным углом отклонения, когда обнаруженное боковое ускорение не равно нулю.
8. Система по п.5, отличающаяся тем, что логическая схема содержит два канала детектирования, соединенные вентилем И.
9. Система по любому из пп.4-8, отличающаяся тем, что ограничение максимально допустимого угла отклонения достигается путем изменения длины силового цилиндра, образующего упор руля.
10. Летательный аппарат, отличающийся тем, что содержит систему ограничения угла отклонения руля по п.4.
| Шаровой кран | 1972 |
|
SU488428A3 |
| УСТРОЙСТВО ДЛЯ СУШКИ ЗЕРНА | 2023 |
|
RU2832551C1 |
| Центрирующее устройство | 1984 |
|
SU1256863A1 |
| US 6926233 В1, 09.08.2005 | |||
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С СЕКЦИОНИРОВАННЫМ РУЛЕМ | 1988 |
|
SU1596623A1 |
| Бортовые системы управления полетом | |||
| / Под общей ред | |||
| Ю.В.БАЙБОРОДИНА | |||
| - М.: Транспорт, 1975, с.254. | |||

