Изобретение относится к области автоматического сканирования поверхностей натурных моделей, имеющих сложную (скульптурно-художественную) поверхность для дальнейшего использования результатов в создании управляющих программ станков с ЧПУ.
Известен способ сканирования, реализованный в устройстве (а.с. СССР №849149 от 23.07.1981 г., М. кл. G05B 19/42) заключающийся в перемещении координат станка перпендикулярных датчику сканирования, и непрерывной записи сигналов перемещения от датчиков этих координат и датчика сканирования, щуп которого прижимается к сканируемой поверхности модели.
Недостатком способа и устройства является снижение скорости сканирования на крутых участках модели в связи с существенным увеличением давления щупа на модель и невозможностью сканирования профилей с кривизной, близкой и равной 90 угл. град., в связи с возможностью поломки щупа и датчика сканирования.
Известен и способ сканирования, реализованный в системе управления для сканирующего микроскопа (WO 9635154 А1 от 19.04.1996 г., М. кл. G05B 19/42), где, перед сканированием выбирают и запоминают координаты точек сканирования в заданной последовательности (шаг сканирования). Последовательно позиционируют измеритель в эти точки и проводят измерения.
А также известен, способ и устройство для фрезерования поверхностей произвольной формы (2005128836/02 от 2007,08.20. М. кл. В23С 3/16), при котором производят оцифровку по координатам множества расположенных с заданным шагом точек этой поверхности на участке оцифровки, форма и площадь которого регламентируется формой и площадью формируемого на этой поверхности рисунка гравюры.
Эти способы также имеют недостатки. Это низкая скорость и точность сканирования.
Действительно, требуется дополнительное время на подготовку к сканированию, а точность и скорость сканирования зависят от правильного выбора шага сканирования. Шаг же сканирования должен выбираться по кривой сканируемого профиля, которая заранее не известна. Неправильный выбор шага сканирования приводит либо к снижению точности (большой шаг), либо - к измерению и вводу лишних точек т.е. снижению скорости сканирования (малый шаг сканирования).
Наиболее близким по технической сущности к предлагаемому способу и устройству является техническое решение, реализованное в устройстве для изготовления программ (а.с. СССР №463101, от 05.03.1975 г., М. кл. G05B 19/42).
Устройство содержит датчик сканирования, привод координаты сканирования, персональный компьютер, через интерфейс подключенный к приводам подач, а также блок управления, первым входом подключенный к датчику сканирования, а выходом к персональному компьютеру.
Способ заключается в перемещении датчика сканирования относительно модели в направлении, зависящем от величины зазора между датчиком и поверхностью модели, определяемой по напряжению на межэлектродном промежутке (МЭП) при электрическом дуговом разряде и записи импульсных сигналов перемещения приводов координат.
Недостатками этого способа и устройства являются возможность сканирования только токопроводящих моделей, а также, низкие точность и скорость сканирования.
Действительно, низкая точность используемого здесь способа измерения межэлектродного промежутка по напряжению при электрическом разряде существенно ниже, чем у применяемых для измерения перемещений в датчиках сканирования оптического, индукционного, и контактного способов из-за:
- нестабильности процесса электродугового разряда;
- разрушения поверхностей модели и щупа;
- нестабильности процесса регулирования МЭП, которая, к тому же, существенно ограничивает скорость перемещения координат.
Кроме того, щуп имеет большие размеры (5 электродов), а это также снижает точность сканирования по сравнению с более тонким щупом.
Невозможность сканирования вертикальных участков модели, или близких к вертикальным, также является недостатком известного решения.
Требуется дополнительное время на подготовку к сканированию при переходах из карманов в карман и измерению полок. Это также снижает производительность.
Задача изобретения - повышение скорости и точности сканирования сложных (скульптурно-художественных) моделей как из металлических, так и неметаллических материалов.
Поставленная задача решается тем, что в предлагаемом способе сканирования на станке с ЧПУ датчику сканирования сообщают переодические колебания от генератора и сравнивают сигналы генератора и датчика, при рассогласовании же этих сигналов останавливают программное перемещение по координатам и изменяют положение координаты сканирования на сближение или удаление от сканируемой поверхности.
А также тем, что устройство сканирования на станке с ЧПУ для осуществления предлагаемого способа дополнительно содержит вибратор, генератор и устройство ЧПУ, подключенное к приводам координат станка, перпендикулярных координате сканирования, а входом прерывания подачи - ко входу блока управления, а генератор соединен с вибратором и вторым входом блока управления, привод же координаты сканирования через вибратор соединен с датчиком сканирования, а импульсный выход блока управления подключен ко входу привода координаты сканирования.
Это позволит повысить скорость и точность сканирования металлических, неметаллических моделей.
Способ и работа устройства сканирования поясняются описанием и чертежами.
На фиг.1 представлена блок схема предлагаемого устройства сканирования на станке с ЧПУ.
Устройство содержит датчик сканирования - 1, привод координаты сканирования - 2, последовательно соединенные персональный компьютер - 3 и интерфейс - 4, подключенный к приводам подач - 5 и 6, а также блок управления - 7, одним входом подключенный к датчику сканирования, а выходом соединенный с приводом координаты сканирования - 2 и интерфейсом - 4. Устройство также содержит генератор - 8, вибратор - 9 и устройство ЧПУ-10, выходами подключенное к приводам подач - 5 и - 6, а входом прерывания подачи - к соответствующему выходу блока управления - 7. Генератор - 8 соединен с вибратором - 9 и вторым входом блока управления, а привод координаты сканирования через вибратор - 9 соединен с датчиком сканирования - 1. Кроме того, на схеме показаны стол станка - 11 с установленной на нем сканируемой моделью - 12.
В качестве датчика сканирования - 1 используется 3-х координатный датчик контакта.
Устройство ЧПУ - практически любого типа, имеющее возможность прерывания подачи по внешнему сигналу (например, как при обеспечении функции стружкодробления или резьбонарезки, являющимися штатными функциями устройства).
Приводы подачи и сканирования могут быть выполнены как шаговыми, так и следящими.
В качестве генератора может быть использован стандартный генератор синусоидальных сигналов, а в качестве вибратора - электромагнит или пьезоэлемент.
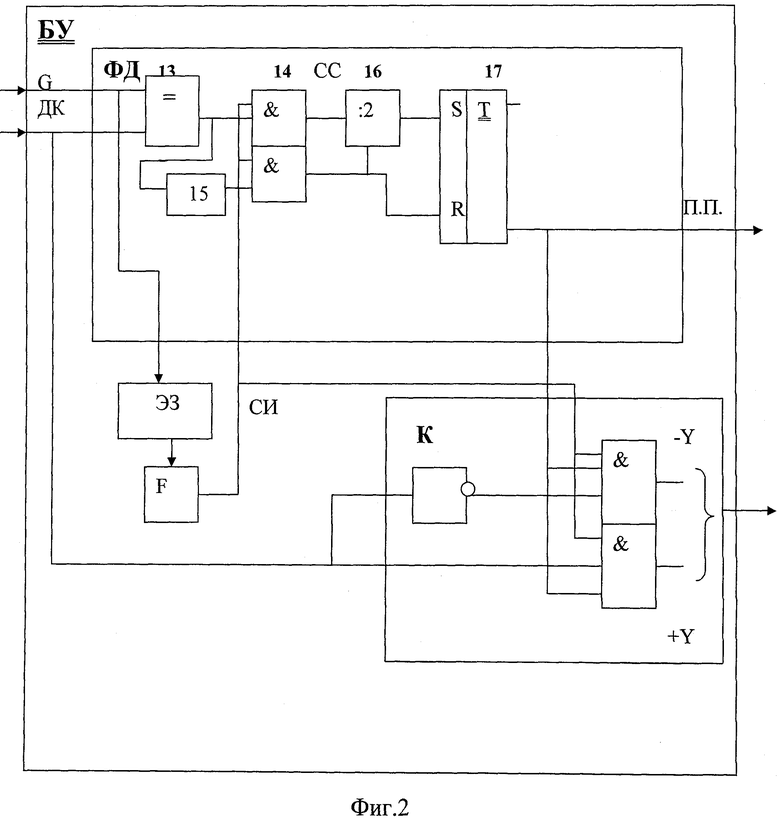
На фиг.2. приведена структурно-функциональная схема блока управления.
Блок содержит:
ФД-фазовый дискриминатор,
Э3-элемент задержки,
F-формирователь импульсов,
К-коммутатор знака.
Входы фазового дискриминатора подключены ко входам блока управления, а выходы - ко входу коммутатора знака и выходу прерывания подачи блока управления, другой вход коммутатора знака объединен со синхровходом фазового дискриминатора и выходом формирователя импульсов, вход которого через элемент задержки соединен со вторым входом блока управления.
Примеры функциональных схем фазового дискриминатора ФД и коммутатора знака-К приведены на этой же схеме.
Фазовый дискриминатор состоит из последовательно соединенных схемы совпадения - 13, элементов «И» - 14, элемента «НЕ» - 15, делителя частоты на два - 16 и триггера - 17.
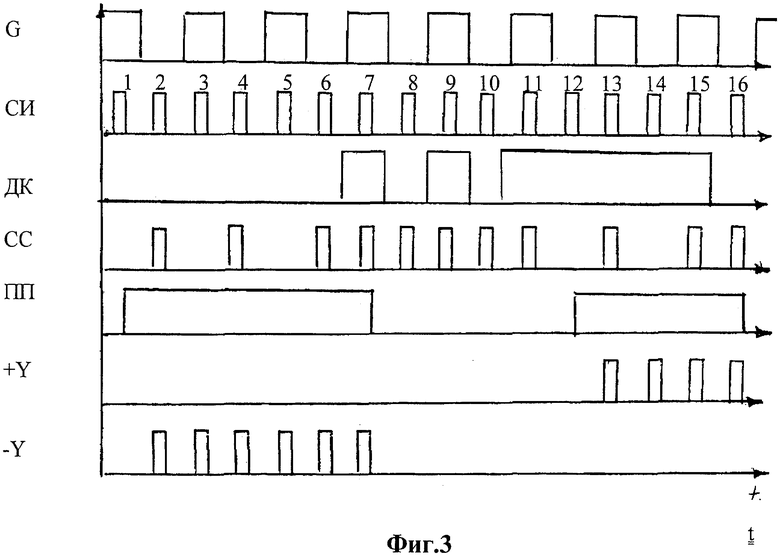
На фиг.3. приведена диаграмма работы устройства, где:
G - сигнал с генератора (Фиг.2),
СИ - сигнал с выхода формирователя F, (синхроимпульсы),
ДК - сигнал с датчика сканирования,
СС - синхронизированный сигнал схемы совпадения с выхода элемента 14,
П.П. - сигнал на выходе прерывания подачи блока управления,
+Y/-Y - сигналы на импульсном выходе блока управления.
Цифрами показан порядковый номер синхроимпульса.
Для осуществления способа предварительно в УЧПУ вводится программа перемещения стола при сканировании модели, например программа «построчного» перемещения (сканирования) или сканирования по «контуру». Запись импульсных сигналов перемещения приводов координат и датчика сканирования осуществляется в память персонального компьютера. В компьютере установлена программа, обеспечивающая последовательную запись этих сигналов. В качестве датчика сканирования используется датчик контакта. Такой датчик в свободном состоянии замкнут, а при контакте щупа с поверхностью по любой из 3-х координат - размыкается
Согласно предложенному способу датчику сканирования сообщают переодические колебания с частотой генератора - G (фиг.2.). В каждом полупериоде колебаний генератора сравнивают сигнал генератора и датчика сканирования во время действия синхроимпульса - (СИ). При отсутствии контакта щупа с моделью сигнал на выходе датчика будет нулевым (ДК, СИ №1…6). В этом случае возникает рассогласование сигналов датчика и генератора. В связи с этим программное перемещение координат станка останавливают (П, П,), а координату сканирования перемещают на сближение щупа с поверхностью модели. Вблизи поверхности модели щуп в результате колебаний датчика будет в одном полупериоде контактировать с поверхностью, а в следующем - отходить от нее. При этом на выходе датчика появится переодический сигнал, совпадающий по частоте с частотой генератора, но сдвинутый по фазе относительно него в связи с инерционностью электромеханической системы «вибратор-датчик сканирования».Чтобы избежать ошибок при сравнении, вызванных этим рассогласованием, сравнение этих сигналов осуществляют во время действия синхроимпульса, который сдвигают относительно начальной фазы генератора на величину, большую сдвига фазы сигнала датчика сканирования. Поэтому в эти моменты переодический сигнал с датчика сканирования, при нахождении щупа вблизи сканируемой поверхности, будет согласован с сигналом генератора. В этом случае, согласно способу, продолжают программное перемещение стола. Если в результате этого перемещения щуп без отрыва прижмется к поверхности модели и датчик разомкнется, опять возникнет рассогласование между сигналами с генератора и датчика. Программное перемещение координат опять останавливают, а координату сканирования перемещают. Поскольку рассогласование возникло в результате контакта датчика с поверхностью, то координату сканирования перемещают в направлении разведения щупа и модели. Таким образом, при сканировании щуп датчика не контактирует непрерывно со сканируемой поверхностью. Это улучшает условия скольжения щупа по модели. При этом снижается среднее давление щупа на модель. Все это позволяет повысить скорость сканирования, особенно, на крутых участках поверхности. При наезде щупа на вертикальный участок, согласно принципу работы, перемещаться будет только координата сканирования, поэтому поломки щупа не происходит.
Перед работой устройства в УЧПУ вводится программа перемещения стола при сканировании модели. Например, программа «построчного» сканирования или сканирования по «контуру».В компьютере установлена программа, обеспечивающая последовательную запись импульсных сигналов перемещений с приводов - 2,5 и 6.
Эти сигналы могут сниматься как со входа привода, так и с датчика положения координаты. Интерфейс обеспечивает нормализацию, синхронизацию и последовательный ввод этих сигналов в ПК.
Датчик сканирования в свободном состоянии замкнут, а при контакте щупа с поверхностью по любой из 3-х координат - размыкается. Амплитуда вибраций датчика может настраиваться с помощью изменения амплитуды генератора - 8, в зависимости от требований точности и скорости сканирования. Оптимальная амплитуда равна дискретности перемещения привода координаты сканирования.
Устройство работает следующим образом.
С помощью схемы совпадения - (13) ФД сравниваются сигналы генератора (G) (Фиг.3.) и датчика сканирования (ДК) и синхронизируются в каждом полупериоде на элементе 14 синхроимпульсом (СИ). При отсутствии контакта щупа с моделью сигнал на выходе датчика - 1 сканирования будет отсутствовать (СИ №1…6). Сработает схема совпадения - 13 фазового дискриминатора при неравенстве сигналов датчика и генератора в течение одного полупериода. Этот сигнал через элементы 15 и 14 установит триггер 17 в положение, прекращающее подачу импульсов с УЧПУ на приводы - 2 и 5 станка (П, П,). Одновременно сигнал с триггера разрешает прохождение синхроимпульсов через коммутатор знака-К на импульсный выход блока управления (-Y), т.е. на вход привода сканирования, который вызывает движение координаты на сближение щупа и модели. При приближении щупа датчика к модели щуп, в результате колебаний датчика, будет в одном полупериоде контактировать с поверхностью, а в следующем - отходить от нее. При этом на выходе датчика появится периодический сигнал, совпадающий по частоте с частотой генератора (ДК, СИ №7…11). Произойдет согласование сигналов генератора и датчика. При этом сигнал на схеме совпадения 13 изменится. Неравенства сигналов с генератора и датчика в период действия синхроимпульса не будет. При поступлении подряд за период двух импульсов СС через делитель 16 на триггер - 17 он перевернется, а подача импульсов на вход привода сканирования прекратится. Одновременно с выхода блока управления в УЧПУ поступит сигнал (П, П,) разрешающий продолжение движения приводов - 2 и 5. Допустим, что в результате этого движения щуп без отрыва прижмется к поверхности модели и датчик сканирования разомкнется (ДК). Схема совпадения - 13 сработает при рассогласовании в течение одного периода (два синхроимпульса подряд (СИ №11-12)). Тогда сигнал от схемы совпадения фазового дискриминатора (СИ №12) перевернет триггер - 17, а на входе УЧПУ - (П.П.) появится сигнал, прекращающий подачу импульсов на приводы - 2 и 5. Одновременно сигнал с триггера разрешает прохождение синхроимпульсов (СИ №13…16) через коммутатор знака-К на импульсный выход блока управления (+Y), т.е. на вход привода сканирования, который вызывает движение координаты на разведение щупа и модели. Таким образом, направление перемещения (т.е. +Y или -Y) координаты сканирования при рассогласовании сигналов генератора и датчика определяется состоянием этого датчика.
Устройство обеспечивает оптимальный шаг сканирования модели (например, в пределах дискретности привода сканируемой координаты) без предварительного изучения крутизны ее поверхности.
Действительно, формирование импульса перемещения по координате сканирования происходит только при нарушении фазировки (рассогласовании) сигналов с генератора и датчика сканирования. А это происходит когда перемещение модели вызывает неотрывное касание ее щупом или отхода от нее щупа. На диаграмме и показан наиболее неблагоприятный случай, когда при нарушении фазировки вырабатывается несколько импульсов на привод сканирования. Это может произойти на участках с высокой крутизной. При высокой крутизне сканируемой поверхности на один импульс перемещения по координате 5 (6) может приходиться несколько компенсирующих импульсов по сканируемой координате. Этот случай рассмотрен на диаграмме.
Чем меньше крутизна сканируемого участка модели, тем перемещение модели по координате 5 (6) до ее касания со щупом будет больше. При этом никакой промежуточной информации по координате сканирования до момента касания измеряться и запоминаться не будет. Таким образом, автоматически обеспечивается оптимальный шаг сканирования. Вибрация датчика сканирования уменьшает время контакта щупа с поверхностью модели и улучшает скольжение щупа по этой поверхности.
Все это позволяет повысить скорость и/или точность сканирования, обеспечить сканирование вертикальных участков модели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ параметрической компенсации циклических погрешностей привода подач станка с ЧПУ | 1986 |
|
SU1403017A1 |
| СПОСОБ ПРОЧТЕНИЯ ЗАКРЫТЫХ ДОКУМЕНТОВ | 2011 |
|
RU2451290C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| Зубофрезерный станок с чпу | 1977 |
|
SU666016A1 |
| Устройство для коррекции циклических ошибок | 1986 |
|
SU1359770A1 |
| Устройство для коррекции циклических ошибок | 1985 |
|
SU1293697A1 |
| Устройство для формирования корректирующих сигналов перемещения | 1984 |
|
SU1233106A1 |
| Роторный зубодолбежный станок с ЧПУ | 1989 |
|
SU1779542A1 |
| Роторный зубодолбежный станок | 1987 |
|
SU1583229A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
Изобретение относится к области автоматического сканирования поверхностей моделей, имеющих сложную поверхность для дальнейшего использования результатов в создании управляющих программ станков с ЧПУ. Способ включает программное перемещение координат станка, перпендикулярных датчику сканирования, и запись импульсных сигналов перемещения приводов координат и датчика сканирования. Датчику сканирования сообщают периодические колебания от генератора и сравнивают сигналы генератора и датчика сканирования. При их рассогласовании останавливают программное перемещение координат станка и изменяют положение координаты сканирования на сближение или удаление от сканируемой поверхности модели. Устройство содержит датчик сканирования, привод координаты сканирования, персональный компьютер, через интерфейс подключенный к приводам подач, а также блок управления. Первым входом блок управления подключен к датчику сканирования, а выходом к персональному компьютеру. Устройство содержит вибратор и генератор, при этом устройство ЧПУ подключено к приводам координат станка, перпендикулярных координате сканирования, а входом прерывания подачи - ко входу блока управления. Технический результат состоит в повышении скорости и точности сканирования моделей. 2 н.п. ф-лы. 3 ил.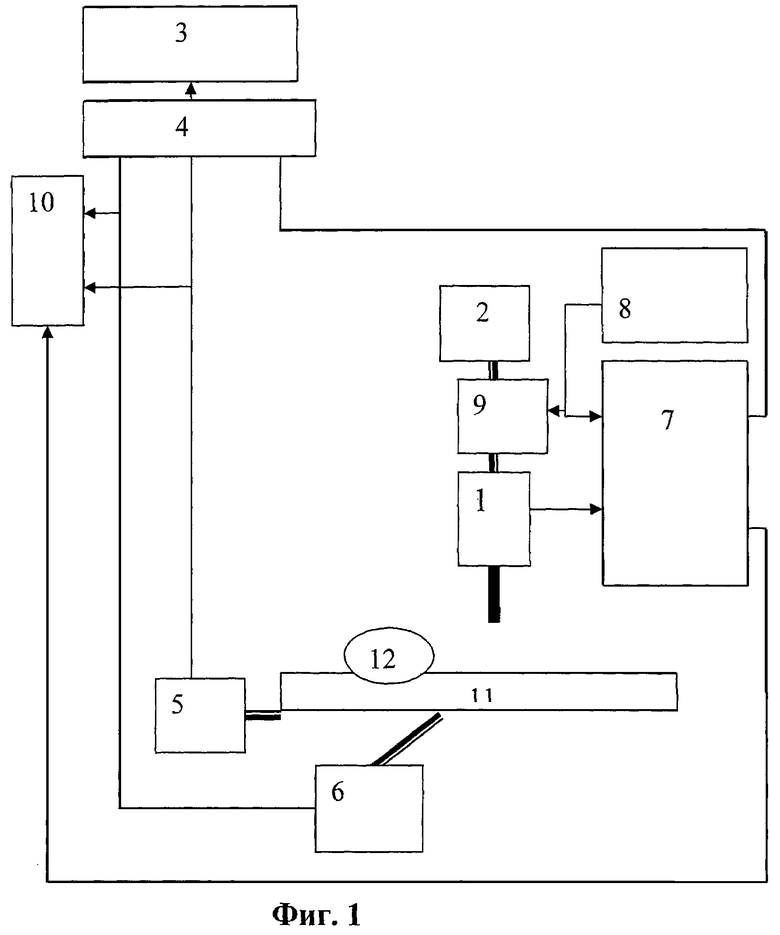
1. Способ сканирования поверхностей модели на станке с ЧПУ, включающий программное перемещение координат станка, перпендикулярных датчику сканирования, и запись импульсных сигналов перемещения приводов координат и датчика сканирования, отличающийся тем, что датчику сканирования сообщают периодические колебания от генератора и сравнивают сигналы генератора и датчика сканирования, при рассогласовании которых останавливают программное перемещение координат станка и изменяют положение координаты сканирования на сближение или удаление от сканируемой поверхности модели.
2. Устройство для сканирования поверхностей модели на станке с ЧПУ, содержащее датчик сканирования, привод координаты сканирования, персональный компьютер, через интерфейс подключенный к приводам подач, а также блок управления, первым входом подключенный к датчику сканирования, а выходом - к персональному компьютеру, отличающееся тем, что оно содержит вибратор и генератор, при этом устройство ЧПУ подключено к приводам координат станка, перпендикулярных координате сканирования, а входом прерывания подачи - ко входу блока управления, причем генератор соединен с вибратором и вторым входом блока управления, привод координаты сканирования через вибратор соединен с датчиком сканирования, а импульсный выход блока управления подключен ко входу привода координаты сканирования.
| Устройство для изготовления программ | 1972 |
|
SU463101A1 |
| СПОСОБ БЕСКОНТАКТНОГО СКАНИРОВАНИЯ ФОРМЫ НАРУЖНОГО КОНТУРА КРИВОЛИНЕЙНОЙ ПОВЕРХНОСТИ | 2000 |
|
RU2271514C2 |
| СТАЛЬ И ИЗДЕЛИЕ, ВЫПОЛНЕННОЕ ИЗ НЕЕ (ВАРИАНТЫ) | 2008 |
|
RU2387731C2 |
| WO 9635154 А1, 11.07.1996. | |||

