Изобретение относится к устройству для снятия шпуль в намоточной машине согласно ограничительной части пункта 1 формулы изобретения.
Обычно, при производстве синтетических нитей нити после формования их из расплава наматываются в намоточных машинах на отдельные шпули. Для реализации непрерывного потока материала предпочтительно используются намоточные машины с двумя установленными с выступом намоточными шпинделями, которые расположены на подвижной опоре и попеременно переводятся на участок намотки и участок смены. Таким образом, после формования волокна из расплава можно непрерывно наматывать нити на шпули. Кроме того, известно, что в целях автоматизации на намоточных машинах имеются устройства для снятия шпули, посредством которых шпули после из изготовления снимаются с намоточной машины и передаются, например, на устройство для транспортировки шпуль. Подобное устройство для снятия шпуль с намоточной машины известно из DE 4421916 А1.
В известном устройстве несколько расположенных на расстоянии друг от друга поворотных манипуляторов установлены на поворотной оси. При этом один поворотный манипулятор предпочтительно можно использовать для приема шпуль, а второй поворотный манипулятор - для подачи гильз. Поворотные манипуляторы установлены на горизонтальном уровне и позволяют их перемещение по вертикально проходящей поворотной оси из положения снятия в положение передачи. Поворотные манипуляторы при этом расположены на поворотной оси в форме турникета.
В известном устройстве поворотные манипуляторы во время вращения существенно выступают за боковые участки намоточной машины в зависимости от количества шпуль, а тем самым в зависимости от выступающей длины поворотных манипуляторов. Однако при производстве формируемых из расплава нитей принято располагать большинство намоточных машин в одном ряду друг рядом с другом для возможности изготовления большого количество нитей. Следовательно, известное устройство требует большего расстояния между соседними намоточными машинами, что приводит к увеличению занимаемой площади для всей линии.
В соответствии с этим задача изобретения заключается в создании устройства для снятия шпуль подобного рода таким образом, чтобы снятие шпуль выполнялось в основном в пределах ширины намоточной машины.
Еще одна цель изобретения заключается в разработке устройства для снятия шпуль подобного рода, которое позволяет высокую степень автоматизации при снятии шпуль и подаче гильз.
Эта задача решается согласно изобретению посредством устройства с признаками по пункту 1 формулы.
Предпочтительные конструктивные варианты изобретения определены признаками и комбинациями признаков зависимых пунктов формулы.
Изобретение отличается тем, что формируемые в намоточной машине шпули могут сниматься и отводиться в любое время и с любыми временными интервалами. Тем самым сохраняются преимущества неподвижно установленного устройства для снятия шпуль. Кроме того, используется свободное пространство сверху для того, чтобы прежде всего в самом узком пространстве снимать и отводить с намоточной машины несколько шпуль. Для этого поворотные манипуляторы перемещаются в вертикально направленной плоскости перемещения на горизонтально направленной поворотной оси. Тем самым поворотные манипуляторы требуют, по существу, только такую занимаемую площадь, которая ненамного превышает ширину шпули. Следовательно, устройство подходит прежде всего для того, чтобы отводить шпули в каждой из намоточных машинах, которые в большом количестве образуют продольную линию машин. Расстояние между соседними намоточными машинами при этом определяется исключительно шириной намоточной машины. Так как после приема намотанных шпуль с намоточной машины на высвобождающийся намоточный шпиндель для начала следующего процесса намотки обычно надевается гильза, поворотные манипуляторы установлены на поворотной оси в плоскости перемещения под углом друг к другу (с угловым смещением), причем поворотные манипуляторы попеременно могут переводиться в положение снятия. Тем самым возможно обеспечить короткое время прерывания (остановки), так как снятие шпуль может выполнять один из поворотных манипуляторов, а подачу новых гильз - второй поворотный манипулятор. Угол (смещения) между поворотными манипуляторами при этом имеет такие размеры, что не возникает препятствий для снятия и передачи шпули одним из поворотных манипуляторов и установки гильз вторым поворотным манипулятором.
Угол между поворотными манипуляторами с величиной в районе 90° проявил себя как особенно предпочтительный для того, чтобы можно было выполнять снятие шпуль и подачу гильзу на самом узком пространстве.
Высокую гибкость снятия шпуль и подачу гильзу можно также улучшить за счет того, что поворотные манипуляторы выполнены на поворотной оси с возможностью поворота по часовой стрелке и/или против часовой стрелки. В частности, такое возвратно-поступательное поворотное движение поворотных манипуляторов предпочтительно используется для того, чтобы можно было выполнять подачу электроэнергии на вспомогательные агрегаты поворотных манипуляторов простым способом посредством кабельных соединений.
Для этого поворотную ось предпочтительно устанавливают на неподвижную опору с возможностью вращения и соединяют с приводом механизма вращения. Крепежные концы поворотных манипуляторов жестко соединены с поворотной осью, поэтому поворотные манипуляторы можно поворачивать непосредственно с помощью привода механизма вращения.
Для обеспечения возможности быстрой и надежной транспортировки снятых с намоточной машины шпуль предусмотрено устройство для транспортировки шпуль, которое имеет по меньшей мере один узел приема шпуль на каждой намоточной машине, за счет чего по меньшей мере один из поворотных манипуляторов можно перевести из положения снятия в положение передачи узла приема шпуль.
При использовании мобильных транспортировочных устройств предпочтительно используется усовершенствованный вариант устройства, в котором узел приема шпуль расположен напротив намоточной машины и в котором поворотный манипулятор может поворачиваться между положением снятия и положением передачи на угол поворота в диапазоне 180°. При этом, чтобы осуществлять транспортировку шпуль, можно использовать проходящий параллельно продольной линии машин путь транспортировки.
Однако можно также выполнить узел приема шпуль на полу перед намоточной машиной, и закрепленный с возможностью вращения между положением снятия и положением передачи поворотный манипулятор может иметь зажимной механизм для закрепления шпули. За счет этого простым поворотом на 90° можно перевести шпули из положения снятия в положение передачи.
При производстве синтетических нитей при намотке также возникают ситуации, в которых катушки по причине обрыва нити имеют недостаточный размер или по причине ошибочного технологического процесса недостаточное качество нити. В этих случаях особенно предпочтительным является усовершенствованный вариант изобретения, в котором устройство для транспортировки шпуль имеет несколько узлов приема шпуль на каждой намоточной машине, которые в диапазоне поворота поворотного манипулятора образуют несколько последовательных положений передачи. Тем самым можно выполнить классификацию уже при снятии шпуль. Таким образом, можно отдельно снимать и отводить бракованные шпули в одном из положений передачи.
Для приема перемещаемых посредством поворотного манипулятора шпуль можно выполнить узел приема шпуль как с подвижной оправкой для шпуль, которая в положении передачи удерживается на одном уровне с поворотным манипулятором, так и с желобом для шпуль или движущимся ленточным транспортером.
Для полной автоматизации поворотным манипуляторам устанавливают в соответствие узел передачи гильз устройства подачи гильз, который предпочтительно имеет направляющую трубу, которая в положении загрузки установлена по меньшей мере на одном уровне с одним из поворотных манипуляторов.
При этом подачу гильз на поданные в положение заполнения поворотные манипуляторы можно предпочтительно выполнить согласно усовершенствованному варианту изобретения, в котором узел передачи гильз выполнен над намоточным шпинделем перед намоточной машиной. Таким образом, возможно передать гильзу из направляющей трубы на поворотный манипулятор всего лишь за счет действия силы тяжести. Дополнительные направляющие средства не требуются.
Однако также можно выполнять узел передачи гильз на полу перед намоточной машиной. При этом установленный в положении загрузки поворотный манипулятор имеет зажимной механизм для фиксации одной или нескольких гильз.
Для передачи установленных на поворотном манипуляторе шпуль или гильз особенно предпочтительным является, если поворотные манипуляторы имеют механизм сталкивания, посредством которого шпуля и/или гильза закреплена на поворотном манипуляторе с возможностью перемещения по осевой. Тем самым в положении передачи поворотного манипулятора можно равномерно столкнуть шпули с поворотного манипулятора и передать непосредственно на узел приема шпуль. Также можно подать одну или несколько закрепленных на поворотном манипуляторе гильз в положении снятия на поданный намоточный шпиндель с непрерывным перемещением.
Особенно зарекомендовал себя вариант, когда механизм сталкивания выполнен из толкателя и линейного привода, причем толкатель перемещается по поворотному манипулятору и, причем линейный привод расположен в осевом удлинении поворотного манипулятора. Таким образом, можно использовать необходимое для поворотного движения поворотного манипулятора свободное пространство для размещения дополнительных агрегатов. Кроме того, можно компенсировать вес поворотных манипуляторов на поворотной оси.
Предлагаемое устройство прежде всего подходит для того, чтобы снимать с осуществляющих непрерывную намотку намоточных машин постоянно наматываемые шпули и передавать их на устройство для транспортировки шпуль. При этом нет зависимости от количества наматываемых на намоточном шпинделе шпуль. Следовательно, предлагаемое устройство подходит для того, чтобы принимать только одну шпулю с намоточного шпинделя или даже несколько шпуль с намоточного шпинделя.
Далее изобретение поясняется подробнее на основании некоторых примеров осуществления предлагаемого устройства со ссылкой на прилагаемые чертежи.
На чертежах показаны:
фиг.1 схематический вид первого примера осуществления предлагаемого устройства,
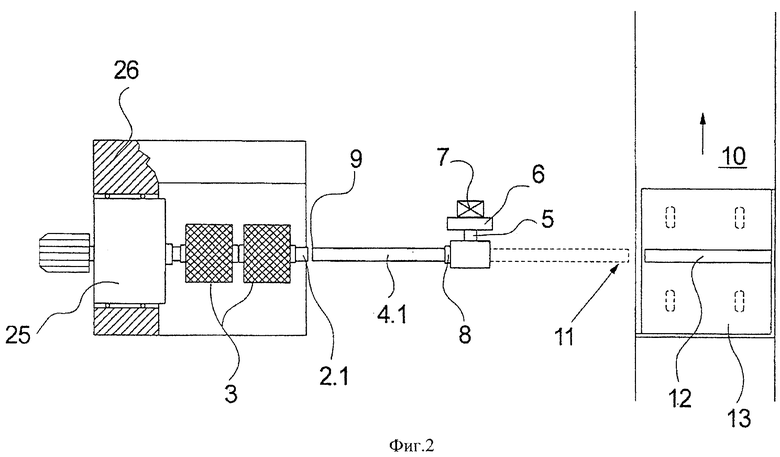
фиг.2 схематический вид сверху на пример осуществления по фиг.1,
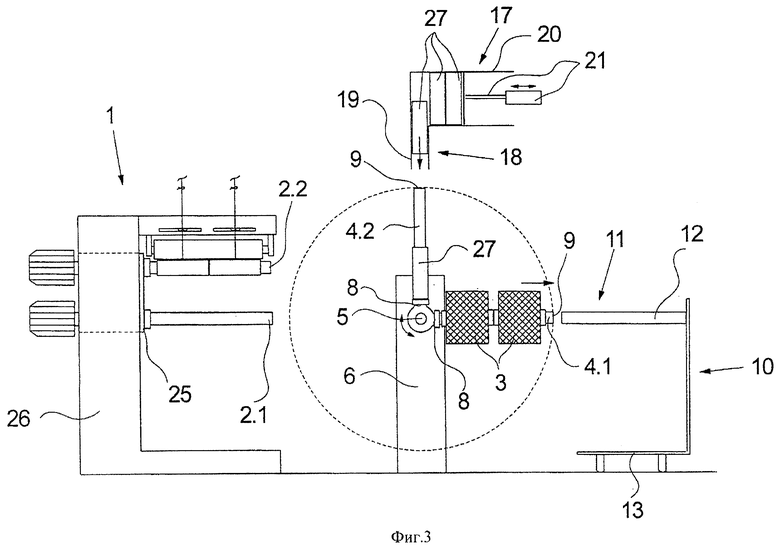
фиг.3,
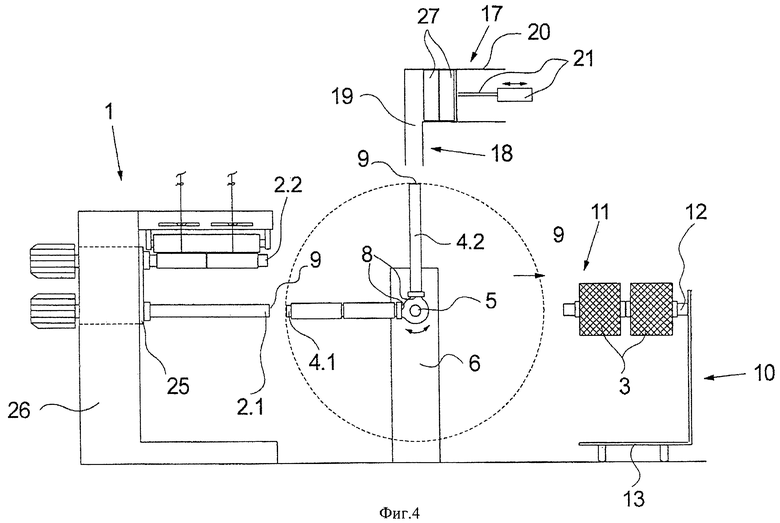
фиг.4 схематический пример осуществления изобретения по фиг.1 в нескольких рабочих ситуациях,
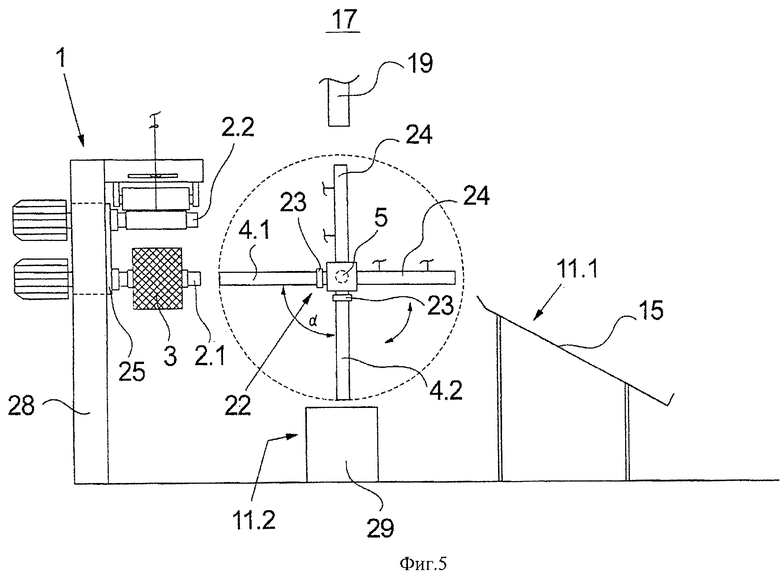
фиг.5 схематический вид еще одного примера осуществления предлагаемого устройства,
фиг.6 схематический вид примера осуществления изобретения по фиг.5 в измененной рабочей ситуации,
фиг.7 схематический вид еще одного примера осуществления предлагаемого устройства.
На фиг.1 и 2 показан первый пример осуществления предлагаемого устройства в нескольких видах. На фиг.1 показан вид сбоку на пример осуществления изобретения, а на фиг.2 - вид сверху. Если не дается точного указания на одну из этих фигур, то нижеследующее описание дается для обеих фигур.
Предлагаемое устройство имеет несколько поворотных манипуляторов 4.1 и 4.2, которые имеют соответственно один крепежный конец 8 и один свободный насадочный конец 9. Поворотные манипуляторы 4.1 и 4.2 соединены своими крепежными концами с поворотной остью 5. Поворотная ось 5 направлена горизонтально и установлена на опоре 6 с возможностью вращения. В этом примере осуществления изобретения поворотная ось установлена с выступом, причем на свободном выступающем конце поворотной оси 5 поворотные манипуляторы 4.1 и 4.2 неподвижно соединены с поворотной осью 5. Противоположным концом поворотная ось 5 соединена с приводом 7 механизма вращения, посредством которого поворотная ось 5 с поворотными манипуляторами 4.1 и 4.2 может поворачиваться по часовой стрелке и против часовой стрелки. При этом поворотные манипуляторы 4.1 и 4.2 передвигаются в вертикально направленной плоскости перемещения. На фиг.1 плоскость перемещения показана плоскостью чертежа. На фиг.2 плоскость перемещения обозначена серединой оси поворотного манипулятора 4.1.
Сбоку рядом с поворотными манипуляторами 4.1 и 4.2 расположена намоточная машина 1. Намоточная машина 1 имеет несколько намоточных шпинделей 2.1 и 2.2, которые установлены на подвижной опоре 25 шпинделя. Опора 25 шпинделя установлена в станине 26 машины подвижно для того, чтобы попеременно подавать намоточные шпиндели 2.1 и 2.2 на участок намотки для намотки шпули и на участок смены для снятия готовой намотанной шпули 3. Подобные намоточные машины общеизвестны из уровня техники и описаны, например, в ЕР 374536 В1. Если здесь не дается более подробного объяснения конструкции и работы намоточной машины, то указывается на процитированный документ.
Поворотные манипуляторы 4.1 и 4.2 установлены перед намоточной машиной таким образом, что находящийся на участке смены намоточный шпиндель 2.1 расположен соосно с поворотным манипулятором 4.1 в положении снятия. При этом, за счет вращения поворотной оси 5 по выбору поворотный манипулятор 4.1 или поворотный манипулятор 4.2 может быть приведен в положение снятия непосредственно перед намоточным шпинделем 2.1.
Над поворотной осью 5 расположено устройство 17 подачи гильз. Устройство 17 подачи гильз имеет для каждой намоточной машины узел 18 передачи гильз, который в этом примере осуществления изобретения имеет направляющую трубу 19 с направленным вниз отверстием. Направляющая труба 19 расположена в плоскости перемещения, при этом поворотные манипуляторы 4.1 и 4.2 выполнены с возможностью приведения в положение загрузки непосредственно под направляющей трубой 19. При этом поворотные манипуляторы 4.1 и 4.2 предпочтительно установлены концентрически относительно образованного направляющей трубой 19 отверстия. Направляющая труба 19 в верхней части связана с магазином 20 гильз, который содержит несколько гильз 27. Магазин 20 гильз имеет направляющее средство 21, посредством которого каждая из гильз 27 может быть направлена в направляющую трубу 19.
С противоположной намоточной машине 1 стороны поворотной оси 5 выполнено устройство 10 для транспортировки шпуль. Устройство 10 для транспортировки шпуль имеет узел 11 приема шпуль, в котором расположена тележка 13 для шпуль. Тележка 13 для шпуль имеет оправку 12 для шпуль, которая свободным концом направлена к направляющему каналу поворотных манипуляторов 4.1 и 4.2. Поворотный манипулятор 4.1 позволяет перевести его за счет поворота поворотной оси 5 в положение передачи, в котором поворотный манипулятор 4.1 и оправка 12 для шпуль расположены, по существу, соосно.
Для объяснения принципа работы предлагаемого устройства, наряду с фиг.1, далее будет приведена ссылка на фиг.3 и 4. На фиг.3 и 4 показан пример осуществления предлагаемого устройства в измененных рабочих ситуациях. При этом фиг.1 показывает ситуацию в начале снятия шпули, фиг.3 - ситуацию при передаче шпуль на устройство для транспортировки шпуль и фиг.4 - надевание новых гильз на пустой намоточный шпиндель.
На показанной на фиг.1 намоточной машине намоточный шпиндель 2.1 с двумя полностью намотанными шпулями 3 находится в положении смены. Намоточный шпиндель 2.2 находится в положении намотки, в котором две проходящие параллельно друг другу нити наматываются рядом друг с другом на шпули. Намоточный шпиндель 2.1 на участке смены намоточной машины обездвижен и готов к смене шпуль. Для этого посредством поворотной оси 5 поворотный манипулятор 4.1 переводится и устанавливается в положении снятия непосредственно напротив намоточного шпинделя 2.1. Затем посредством сталкивающего устройства на намоточном шпинделе 2.1 шпули 3 сталкиваются с намоточного шпинделя 2.1 и надеваются на поворотный манипулятор 4.1. Эта ситуация показана штрих-линиями на фиг.1. После того как шпули 3 установлены на поворотном манипуляторе 4.1, активируется привод 7 механизма вращения поворотной оси 5 для вращения по часовой стрелке таким образом, что поворотный манипулятор 4.1 выводится из положения снятия. Привод 7 механизма вращения остается активированным до тех пор, пока поворотный манипулятор 4.1 не достигнет положения передачи на противоположной стороне и не будет стоять напротив оправки 12 для шпуль узла 11 приема шпули. При этом поворотный манипулятор 4.1 выполняет поворот на угол в прим. 180°. Поворотные манипуляторы 4.1 и 4.2 закреплены относительно друг друга и образуют между собой угол α в диапазоне 90°. Тем самым при вращении поворотной оси 5 поворотный манипулятор 4.2 смещается одновременно по часовой стрелке на 90°.
На фиг.3 показана ситуация после поворота на поворотной оси 5 на угол в 180°. Поворотный манипулятор 4.1 встает в положении передачи напротив оправки 12 для шпуль. Поворотный манипулятор 4.2 установлен в этой ситуации в положении загрузки непосредственно под узлом 18 передачи гильзы. По направляющей трубе 19 на поворотный манипулятор 4.2 последовательно подаются две гильзы 27. В показанной ситуации одна из гильз 27 уже установлена на поворотном манипуляторе 4.2. Вторая гильза 27 направляется из магазина 20 гильз по направляющему средству 21 в направляющую трубу 19. Внутри направляющей трубы 19 гильза 27 под действием своей силы тяжести падает из выходного отверстия направляющей трубы 19 непосредственно на поданный поворотный манипулятор 4.2.
Одновременно с этим шпули 3 на поворотном манипуляторе 4.1 передаются на поданную оправку 12 для шпуль. После передачи шпуль 3 на оправку 12 для шпуль привод 7 механизма вращения поворотной оси 5 снова активируется, за счет чего поворотная ось 5 выполняет поворот прим. на 90° против часовой стрелки. При этом поворотный манипулятор 4.2 с гильзами 27 переводится из положения загрузки в положение снятия.
В положении снятия поворотный манипулятор 4.2 стоит соосно с намоточным шпинделем 2.1, как показано на фиг.4, Теперь возможно передать гильзы 27 с поворотного манипулятора 4.2 на намоточный шпиндель 2.1. Смена шпуль на намоточной машине 1 тем самым завершена. Поворотные манипуляторы 4.1 и 4.2 переводятся за счет активации привода 7 механизма вращения посредством вращения поворотной оси 5 в их исходное положение, как показано на фиг.1. Шпули на оправке 12 для шпуль отвозятся на тележке 13 для шпуль.
На показанных на фиг. 1-4 примерах осуществления изобретения плоскость перемещения поворотных манипуляторов 4.1 и 4.2 направлена по вертикали, поэтому даже большое количество шпуль может быть передано с намоточной машины на устройство для транспортировки шпуль на самом узком пространстве. При этом поворотные манипуляторы требуют пространства, по существу, соответствующего ширине шпули. Поставленные в соответствие поворотным манипуляторам устройство 17 подачи гильз и устройство 10 для транспортировки шпуль приведены в качестве примера. В принципе подходят системы, которые допускают передачу гильзы или прием шпули. Так, можно, например, подводить и позиционировать оправку 12 для шпуль посредством подвесного транспортера или прочих транспортировочных средств.
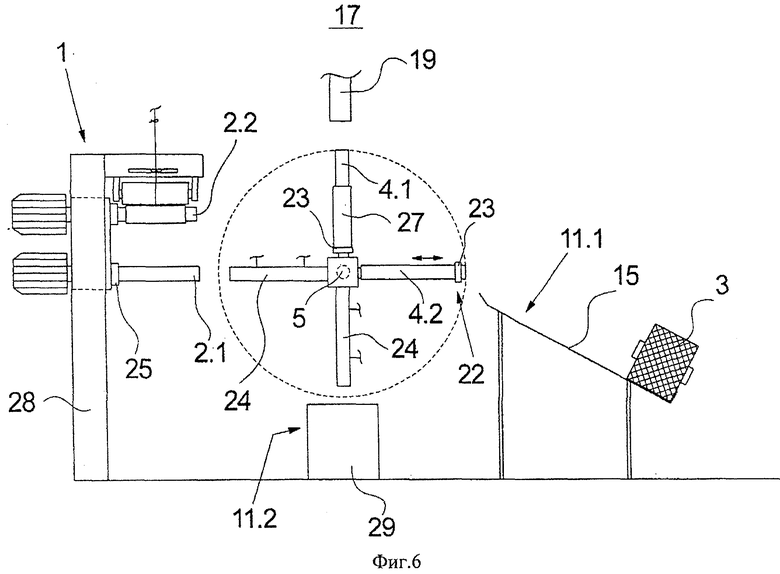
На фиг.5 и 6 схематически показан еще один пример осуществления предлагаемого устройства в виде сбоку в нескольких рабочих ситуациях. Если не дается точного указания на одну из этих фигур, то нижеследующее описание дается для обеих фигур.
Пример осуществления изобретения по фиг.5 и 6, по существу, идентичен примеру осуществления изобретения по фиг.1, поэтому далее будут объясняться только различия, а в остальном будет приводиться ссылка на вышеприведенное описание.
На показанном на фиг.5 и 6 устройстве поворотные манипуляторы 4.1 и 4.2 установлены на поворотной оси 5 со смещением на угол α относительно друг друга. Поворотные манипуляторы 4.1 и 4.2 приводятся в движение за счет вращения поворотной оси 5 по часовой стрелке и против часовой стрелки. Поворотная ось 5 соединена с не показанным здесь приводом механизма вращения и установлена с выступом или обеими сторонами на опоре.
Каждый из поворотных манипуляторов 4.1 и 4.2 имеет по одному сталкивающему механизму 22. Сталкивающий механизм 22 образован толкателем 23 и линейным приводом 24. Толкатель 23 перемещается по соответствующему поворотному манипулятору 4.1 или 4.2, например, в виде охватывающего по окружности кольца. Линейный привод 24, например, является пневматическим цилиндром, расположенным на осевом удлинении соответствующего поворотного манипулятора 4.1 или 4.2 таким образом, что линейный привод 4 простирается, по существу, по противоположной поворотному манипулятору 4.1 стороне поворотной оси 5 внутри плоскости перемещения. Такое выполнение имеет особое преимущество, которое заключается в том, что ведет к симметричному расположению относительно поворотной оси 5, за счет чего устанавливается весовая компенсация относительно поворотной оси 5. Тем самым необходимый крутящий момент для активации поворотной оси 5 ограничивается возникающими от шпуль нагрузками. При этом линейные приводы 24 поворотных манипуляторов 4.1 и 4.2 расположены по отношению друг к другу таким образом, что соответствующие толкатели 23 поворотных манипуляторов 4.1 и 4.2 могут эксплуатироваться отдельно и независимо друг от друга.
С одной стороны поворотных манипуляторов 4.1 и 4.2 расположена намоточная машина 1. Намоточная машина 1 имеет опору 25 шпинделя, которая подвижно установлена на стенке 28 станины. Опора 25 шпинделя имеет два выступающих намоточных шпинделя 2.1 и 2.2, каждая из которых держит и наматывает по одной шпуле. Для этого намоточные шпиндели 2.1 и 2.2 позволяют попеременно перевести себя посредством опоры 25 шпинделя на участок намотки и на участок смены. В показанной на фиг.5 ситуации намоточный шпиндель 2.1 удерживается со шпулей 3 в положении смены.
С противоположной намоточной машине 1 стороны поворотным манипуляторам 4.1 и 4.2 поставлено в соответствие два узла 11.2 и 11.3 приема шпуль устройства для транспортировки шпуль. Первый узел 11.1 приема шпуль имеет желоб 15 для шпуль, посредством которого могут приниматься шпули, столкнутые с поворотного манипулятора 4.1. Желоб 15 для шпуль установлен боком относительно поворотных манипуляторов 4.1 и 4.2. Второй узел 11.2 приема шпуль выполнен на полу непосредственно перед намоточной машиной 1. При этом узел 11.2 приема шпуль образован емкостью 29, которая принимает отдаваемую поворотным манипулятором 4.1 или 4.2 шпулю. Узел 11.2 приема шпули предусмотрен прежде всего для приема бракованных шпуль, которые, например, имеют недостаточный диаметр шпули или недостаточное качество нити. При этом емкость 29 можно подавать вручную или автоматически посредством ленточного транспортера.
В плоскости перемещения над поворотными манипуляторами 4.1 и 4.2 выполнено устройство 17 подачи гильз, причем в этом примере осуществления изобретения показана только одна направляющая труба 19 для передачи гильз.
Показанный на фиг.5 и 6 пример осуществления изобретения по своему принципу работы идентичен предшествующему примеру осуществления изобретения, поэтому далее будут объясняться только различия, а в остальном будет сделана ссылка на вышеприведенное описание.
На фиг.5 показана ситуация, в которой поворотный манипулятор 4.1 расположен в положении снятия непосредственно перед намоточным шпинделем 2.1. После передачи шпули 3 с намоточного шпинделя 2.1 поворотные манипуляторы 4.1 и 4.2 сдвигаются по часовой стрелке за счет активации поворотной оси 5. В зависимости от качества шпули поворотные манипуляторы сдвигаются на угол поворота в 180° или 270°. В случае небракованной шпули поворотный манипулятор 4.1 переводится в достигаемое после 180° положение передачи. Затем активируется приводной механизм 22 на захвате 4.1, за счет чего шпуля 3.1 сталкивается по свободному концу поворотного манипулятора 4.1 и автоматически подается на желоб 15 шпули. Эта ситуация показана на фиг.6. Одновременно на удерживаемый в положении загрузки поворотный манипулятор 4.2 подается гильза 27.
В случае если снятая с намоточного шпинделя 2.1 шпуля 3 бракована, поворотная ось 5 передвигается по часовой стрелке для перемещения поворотных манипуляторов 4.1 и 4.2 на угол поворота в 270°. В качестве альтернативы, можно было бы поместить поворотный манипулятор 4.1 в определяемое узлом 11.2 приема шпули положение передачи также посредством вращения поворотной оси 5 против часовой стрелки на 90°. После достижения положения передачи шпуля передается на узел 11.2 приема шпули, а тем самым шпуля 3 подается в емкость 29. Подробнее эта ситуация не представлена.
Надевание на пустой намоточный шпиндель 2.1 новой гильзы 27 выполняется идентично предшествующему примеру осуществления изобретения за счет того, что поворотный манипулятор 4.2 из положения загрузки переводится в положение снятия. Для сталкивания гильзы 27 на поворотном манипуляторе 4.2 активируется сталкивающий механизм 22.
Представленный на фиг.5 и 6 пример осуществления изобретения прежде всего подходит для того, чтобы выполнять предварительную сортировку шпуль по качеству. Например, можно сложить все шпули с достаточным А качеством непосредственно на желоб для шпуль, которые затем будут взяты с него и непосредственно упакованы. Напротив, шпули так называемого В качества подаются в емкость 29 и утилизируются.
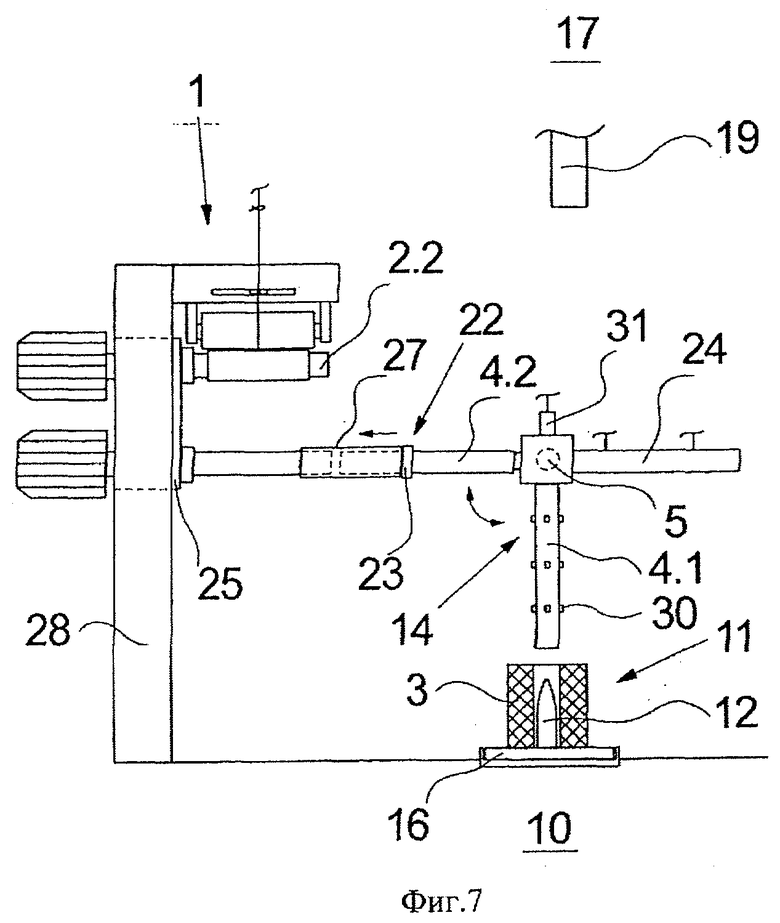
На фиг.7 схематически показан в виде сбоку еще один пример осуществления изобретения предлагаемого устройства. Пример осуществления изобретения, по существу, идентичен примеру осуществления изобретения по фиг.5 и 6, поэтому далее будут объясняться только различия, а в остальном будет сделана ссылка на выше приведенное описание.
На показанном на фиг.7 примере осуществления изобретения поворотные манипуляторы 4.1 и 4.2 закреплены вместе на поворотной оси 5 и могут активно перемещаться по часовой стрелке и против часовой стрелки за счет привода механизма вращения. Поворотный манипулятор 4.1 имеет зажимной механизм 14, который имеет несколько распределенных по окружности поворотного манипулятора 4.1 зажимных элементов, которые выполнены с возможностью активации для зажатия установленной на окружности поворотного манипулятора 4.1 шпули посредством перемещаемого внутри пневматического поршня. Для этого поворотный манипулятор 4.1 имеет вакуумное подключение 31. В отличие от этого поворотный манипулятор 4.2 имеет сталкивающий механизм 22, образованный сталкивателем 23 и линейным приводом 24. В плоскости перемещения поворотным манипуляторам 4.1 и 4.2 поставлены в соответствие над ними - устройство 17 подачи гильз, а на полу - устройство 10 для транспортировки шпуль. При этом узел 11 приема шпуль устройства 10 для транспортировки шпуль образован посредством ленточного транспортера 16, который имеет несколько выступающих оправок 12 для шпуль. Оправки 12 для шпуль выступают вертикально вверх и направлены в узле 11 приема шпуль соосно относительно удерживаемого в положении передачи поворотного манипулятора 4.2.
В представленном на фиг.7 примере осуществления изобретения после передачи шпули с намоточного шпинделя 2.1 на поворотный манипулятор 4.1 поворотная ось 5 поворачивается против часовой стрелки до тех пор, пока поворотный манипулятор 4.1 не выполнит угол поворота в 90° и не будет переведен в положение передачи. В это время активируется зажимной механизм 14 на поворотном манипуляторе 4.1 так, что шпуля 3 жестко закреплена на поворотном манипуляторе 4.1. Как только поворотный манипулятор 4.1 достигнет положения передачи над оправкой 12 для шпуль, зажимной механизм 14 отпускается, шпуля 3 соскальзывает по поворотному манипулятору 4.1 и самостоятельно падает центрированно по оправке 12 для шпуль на ленточный транспортер 16. Посредством ленточного транспортера 16 шпуля 3 отводится. Одновременно второй поворотный манипулятор 4.2 надевает на намоточный шпиндель 2.2 гильзу 27. Для этого на захвате 4.2 активируется сталкивающий механизм 22, за счет чего гильза 27 с равномерным перемещением соскальзывает с поворотного манипулятора 4.2 и подается на намоточный шпиндель 2.1. После того как гильза 27 установлена на намоточном шпинделе 2.1, поворотные манипуляторы 4.1 и 4.2 поворачиваются по часовой стрелке на 90°, в результате чего поворотный манипулятор 4.2 встает в положении загрузки, а поворотный манипулятор 4.1 - в положении снятия. При этом после достижения положения загрузки на поворотный манипулятор 4.2 может непосредственно надеваться новая гильза 27.
В ранее показанных примерах осуществления изобретения устройство снятия шпули показано соответственно с двумя поворотными манипуляторами. Однако в принципе изобретение не ограничивается количеством поворотных манипуляторов, которые проводятся с возможностью вращения вокруг поворотной оси 5. Например, возможно реализовать также три или четыре поворотных манипулятора. Кроме того, также существует возможность располагать поворотные манипуляторы в нескольких проходящих параллельно друг другу вертикальных плоскостях перемещения так, что поворотные манипуляторы закреплены на поворотной оси со смещением также в осевом направлении. Тем самым возможно было бы использовать для процесса сталкивания шпуль с намоточного шпинделя и процесса надевания гильз на намоточный шпиндель два различных положения намоточных шпинделей. Это имеет особенное преимущество в случае, если намоточные шпиндели во время обычного процесса намотки движутся на поворотной тарелке и останавливаются только для смены шпуль. При этом время остановки намоточного шпинделя можно разделить на два небольших периода времени. Точно так же предлагаемое устройство не ограничено тем, что намоточная машина имеет горизонтально направленный намоточный шпиндель для снятия шпуль. Также возможны и вертикальные намоточные шпиндели, при этом поворотные манипуляторы предпочтительно проходят под намоточным шпинделем так, что от сталкивания шпуль можно отказаться в силу того, что полные шпули будут автоматически переходить на поворотные манипуляторы. Кроме того, на этом месте особенно подчеркивается, что предлагаемое устройство связано с управляющим устройством, которое распознает отдельные рабочие состояния посредством датчиков и осуществляет автоматическое управление приводом механизма вращения, а тем самым и поворотным движением поворотного манипулятора. Однако в принципе также существует возможность ручного управления предлагаемого устройства для того, чтобы выполнять снятие шпули.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАМОТКИ ХИМИЧЕСКОЙ НИТИ | 1993 |
|
RU2078734C1 |
| Устройство для намотки ленточного материала | 1983 |
|
SU1138375A1 |
| ЛИНИЯ НАМОТКИ КАТУШЕК РЕЛЕ | 2004 |
|
RU2262479C1 |
| Способ холодной прокатки полос в рулонах и прокатный стан для его осуществления | 1977 |
|
SU788513A1 |
| АВТОМАТИЧЕСКИЙ БУХТОНАМОТЧИК | 2006 |
|
RU2312054C1 |
| Устройство для завивки спиральных пружин | 1980 |
|
SU921656A1 |
| Устройство для намотки бескаркасных якорей электрических машин | 1980 |
|
SU936247A1 |
| СПОСОБ ТЕПЛОВОЙ ОБРАБОТКИ И/ИЛИ УВЛАЖНЕНИЯ ПОЧАТКОВ ПРЯЖИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023779C1 |
| РАЗДЕЛИТЕЛЬНАЯ СИСТЕМА И СООТВЕТСТВУЮЩАЯ УПАКОВОЧНАЯ УСТАНОВКА | 2017 |
|
RU2745901C2 |
| Автоматическая машина для изготовления картонных катушек (шпуль) | 1931 |
|
SU33059A1 |
Изобретение относится к устройству для снятия шпуль на намоточной машине. Устройство содержит установленный с выступом намоточный шпиндель для намотки, по меньшей мере, одной шпули с несколькими поворотными манипуляторами, каждый из которых имеет один свободный насадочный конец и один поворотный крепежный конец. Крепежные концы поворотных манипуляторов соединены с поворотной осью, которая направлена горизонтально. По меньшей мере один из поворотных манипуляторов установлен для снятия шпули в положении снятия соосно с намоточным шпинделем намоточной машины. Поворотные манипуляторы выполнены с возможностью перемещения в вертикально направленной плоскости перемещения и установлены на поворотной оси в плоскости перемещения с угловым смещением между собой. Поворотные манипуляторы выполнены с возможностью попеременного перевода в положение снятия. Достигается повышение автоматизации при снятии шпуль и подаче гильз. 14 з.п. ф-лы, 7 ил.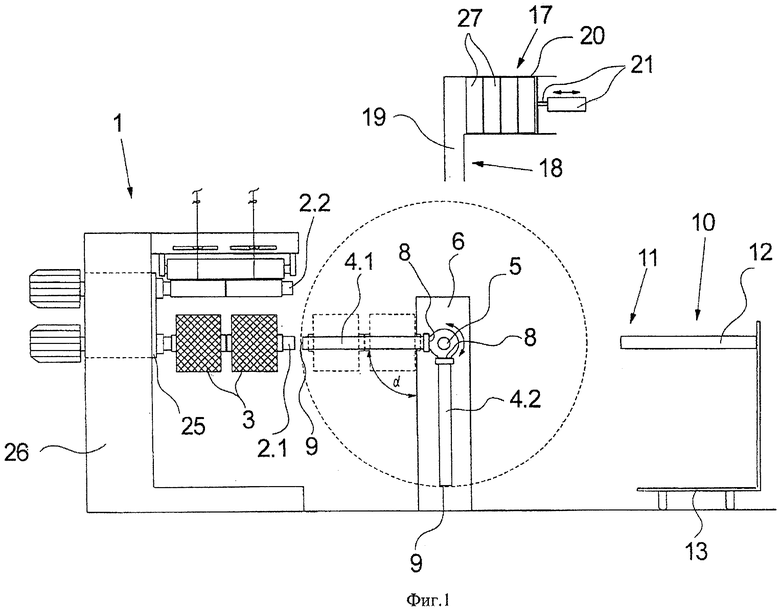
1. Устройство для снятия шпуль на намоточной машине (1), которая имеет установленный с выступом намоточный шпиндель (2.1) для намотки по меньшей мере одной шпули (3) с несколькими поворотными манипуляторами (4.1, 4.2), каждый из которых имеет один свободный насадочный конец (9) и один противоположный крепежный конец (8), причем крепежные концы (8) поворотных манипуляторов (4.1, 4.2) соединены с поворотной осью (5), а по меньшей мере один из поворотных манипуляторов (4.1, 4.2) установлен для снятия шпули (3) в положении снятия соосно с намоточным шпинделем (2.1) намоточной машины (1), отличающееся тем, что поворотная ось (5) направлена горизонтально, а поворотные манипуляторы (4.1, 4.2) выполнены с возможностью перемещения в вертикально направленной плоскости перемещения и установлены на поворотной оси (5) в плоскости перемещения с угловым смещением между собой, при этом поворотные манипуляторы (4.1, 4.2) выполнены с возможностью попеременного перевода в положение снятия.
2. Устройство по п.1, отличающееся тем, что угол смещения имеет величину в районе 90°.
3. Устройство по п.1 или 2, отличающееся тем, что поворотные манипуляторы (4.1, 4.2) выполнены с возможностью поворота на поворотной оси (5) по часовой стрелке и/или против часовой стрелки.
4. Устройство по п.3, отличающееся тем, что поворотная ось (5) установлена с возможностью вращения на неподвижной опоре (6) и соединена с приводом (7) механизма вращения, при этом крепежные концы (8) поворотных манипуляторов (4.1, 4.2) жестко соединены с поворотной осью (5).
5. Устройство по п.1 или 2, отличающееся тем, что предусмотрено устройство (10) для транспортировки шпуль, которое имеет по меньшей мере один узел (11) приема шпуль, и что по меньшей мере один из поворотных манипуляторов (4.1) выполнен с возможностью перемещения из положения снятия в соотнесенное с узлом (11) приема шпуль положение передачи.
6. Устройство по п.5, отличающееся тем, что узел (11) приема шпуль расположен противоположно намоточной машине (1), и что поворотные манипуляторы (4.1, 4.2) выполнены с возможностью поворота между положением снятия и положением передачи на угол поворота в районе 180°.
7. Устройство по п.5, отличающееся тем, что узел (11) приема шпули выполнен на полу перед намоточной машиной (1), и что установленный с возможностью поворота между положением снятия и положением передачи поворотный манипулятор (4.1, 4.2) имеет зажимной механизм (14) для закрепления шпули (3).
8. Устройство по п.5, отличающееся тем, что устройство (10) для транспортировки шпуль имеет несколько узлов (11.1, 11.2) приема шпуль на каждой намоточной машине (1), которые в диапазоне поворота поворотного манипулятора (4.1, 4.2) образуют несколько последовательных положений передачи.
9. Устройство по п.5, отличающееся тем, что узел (11) приема шпули имеет подвижно перемещаемую оправку (12) для шпули, которая в положении передачи расположена соосно с поворотным манипулятором (4.1, 4.2).
10. Устройство по п.5, отличающееся тем, что узел приема шпули имеет желоб (15) для шпуль или движущийся ленточный транспортер (16).
11. Устройство по п.1, отличающееся тем, что предусмотрено устройство (17) подачи гильз, которое имеет узел (18) передачи гильз с направляющей трубой (19), и что по меньшей мере один из поворотных манипуляторов (4.1, 4.2) выполнен с возможностью перемещения в соосное с направляющей трубой (19) положение загрузки.
12. Устройство по п.11, отличающееся тем, что узел (18) передачи гильз выполнен над намоточным шпинделем (2.1) перед намоточной машиной (1), при этом поворотный манипулятор (4.1, 4.2) выполнен с возможностью приведения в положение загрузки под направляющей трубой (19).
13. Устройство по п.11, отличающееся тем, что узел (18) передачи гильзы выполнен на полу перед намоточной машиной (1), и что установленный с возможностью поворота между положением загрузки и положением снятия поворотный манипулятор (4.1, 4.2) имеет зажимной механизм (14) для закрепления гильзы (27).
14. Устройство по п.1, отличающееся тем, что по меньшей мере один из поворотных манипуляторов (4.1, 4.2) имеет сталкивающий механизм (22), посредством которого шпуля (3) и/или гильза (7) соосно установлена на поворотном манипуляторе (4.1, 4.2) с возможностью перемещения.
15. Устройство по п.14, отличающееся тем, что сталкивающий механизм (22) имеет толкатель (23) и линейный привод (24), причем толкатель (23) перемещается по поворотному манипулятору (4.1, 4.2), и причем линейный привод (24) расположен в осевом удлинении поворотного манипулятора (4.1, 4.2).
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| DE 19505838 A1, 07.09.1995 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| JP 51001740 A, 08.01.1976 | |||
| Машина для перфорировки бумажных листов | 1927 |
|
SU14527A1 |
| US 5393003 А, 28.02.1995 | |||
| Устройство для перегрузки паковок | 1990 |
|
SU1726347A1 |
| Устройство для приема наработанных паковок на многоместной мотальной машине и перегрузки их на шпулярник | 1979 |
|
SU1125180A1 |

