Изобретение относится к экспериментальной аэродинамике, в частности к определению характеристик штопора геометрически и динамически подобной свободно летающей модели летательного аппарата (ЛА) в воздушном потоке вертикальной аэродинамической трубы.
Важность исследования проблемы полета на больших углах атаки обусловлена, прежде всего, необходимостью обеспечения безопасности эксплуатации самолета и предотвращением возникновения сваливания самолета и попадания его в штопор. Не случайно по мировой статистике летных происшествий свыше пятидесяти процентов аварий и катастроф происходит именно на этих режимах. (Авиация общего назначения. Рекомендации для конструкторов. Под ред. д.т.н., проф. В.Г.Микеладзе, М., ЦАГИ, 2001 г., стр.213). Проблемы сваливания и штопора являются критическими для всех типов самолетов. Особенно остро они стоят для истребительной авиации в связи с освоением сверхбольших углов атаки. При этом введение эксплуатационных ограничений не всегда приемлемо, поскольку в этом случае снижаются маневренные возможности самолета. Проблема безопасности полета на больших углах атаки весьма важна для пассажирских и транспортных самолетов. Решение проблем полета на больших углах атаки и сопротивляемости штопору очень важно для самолетов общего назначения и административных, которые могут пилотироваться сравнительно слабо подготовленными пилотами. Исследование и в значительной степени решение этих проблем может быть осуществлено на этапе проектирования и доработки самолета. Оно может вестись по двум направлениям:
- удовлетворение определенным требованиям по характеристикам сваливания, штопора и методам вывода из него, сформулированным для каждого конкретного типа самолета (истребитель, административный, пассажирский, транспортный и т.д.);
- поиск аэродинамических компоновок самолетов, не имеющих неуправляемых режимов штопора.
Именно на решение этих проблем направлено данное изобретение.
Известен способ определения характеристик штопора ЛА, основанный на проведении летных испытаний реального летательного аппарата (Тетерюков Я.И. Штопор самолетов. - М., Оборонгиз, 1954; Котик М.Г. Динамика штопора самолета - М., Машиностроение, 1976). Способ базируется на том, что пилот на основе ранее разработанных методов пилотирования в штопоре или, основываясь на личном опыте, при попадании в штопор принимает меры по выводу самолета из штопора путем некоторой последовательности действий на органы управления - элероны, руль направления, руль высоты. Действия пилота, положения рулей по времени и параметры движения самолета записываются на бортовые самописцы, которые затем обрабатываются на земле. В результате, на основе этих летных испытаний определяются характеристики штопора и вырабатываются методы пилотирования в штопоре для вывода из него для конкретного типа самолета.
Недостатками этого способа являются:
- высокая степень опасности проведения таких летных испытаний даже для опытного летчика-испытателя;
- опасность потери самолета, поскольку для каждого типа самолета, как правило, требуется разработка своих методов вывода из режима штопора;
- высокая стоимость проведения таких испытаний на натурном ЛА.
Известен также способ исследования характеристик штопора динамически подобной модели самолета в горизонтальной аэродинамической трубе, основанный на размещении модели в потоке аэродинамической трубы на поддерживающем устройстве, позволяющем модели осуществлять свободное вращение с тремя угловыми степенями свободы вокруг неподвижного центра (патент РФ №2227279, 2003 г., МПК G01M 9/00), и устройстве для исследования характеристик штопора самолета в потоке аэродинамической трубы, представляющем собой шарнир, имеющий три угловые степени свободы, обеспечивающий свободное вращение модели вокруг неподвижного центра тяжести и позволяющий динамически подобной модели самолета осуществлять свободное вращение с тремя угловыми степенями свободы вокруг неподвижного центра (патент РФ №2226680, 2004 г., МПК G01M 9/00).
Основными недостатками такого способа являются:
- отсутствие свободного движения модели и, соответственно, свободного штопора, что может не соответствовать реальному движению ЛА, когда радиус штопора не равен нулю;
- когда реальный ЛА имеет радиус штопора, не равный нулю, этот способ принципиально не может моделировать его движение, поскольку сила тяжести, действующая на ЛА, в нем не моделируется;
- сильное влияние поддерживающих устройств на обтекание модели ЛА, даже если радиус штопора у ЛА отсутствует.
Наиболее близким по выполняемым операциям из известных технических решений к предлагаемому изобретению является способ определения характеристик штопора в вертикальной аэродинамической трубе и устройство для его осуществления. (Авиация общего назначения. Рекомендации для конструкторов. Под ред. д.т.н., проф. В.Г.Микеладзе - М., ЦАГИ, 2001 г., стр.272-276). Способ основан на следующих операциях: запускают с помощью тросового подвеса в поток вертикальной аэродинамической трубы геометрически и динамически подобную свободно штопорящую модель летательного аппарата; ожидают момент времени t0 взвешивания модели в потоке вертикальной аэродинамической трубы, который определяется с помощью специального устройства, соединенного с сигнальной лампочкой под номером n=0, после которого модель находится в свободном штопоре; проводят скоростную одновременную съемку на кинопленку движения модели летательного аппарата, хронометра и сигнальных лампочек, подключенных к конкретному рулю, количество которых n≥0, указывающих визуально моменты времени tn отклонения каждого из n рулей на угол δn; выводят модель из потока; проявляют кинопленку; помещают кинопленку в расшифровочный теневой прибор; помещают в карданный подвес расшифровочного теневого прибора макет модели, геометрически подобный свободно штопорящей модели; проецируют на экран изображение свободно штопорящей модели с кинопленки и тень от макета модели; совмещают тень с изображением; считывают с изображения показания хронометра и моменты времени tn, n≥0, загорания сигнальных лампочек, а с лимбов карданного подвеса значения угла ψ поворота модели относительно вертикали, углов атаки α и скольжения β через определенные интервалы времени t; определяют зависимости по времени α(t), β(t), ψ(t), δn(t) - характеристики штопора геометрически и динамически подобной свободно штопорящей модели летательного аппарата.
В устройстве для осуществления данного способа геометрически и динамически подобная модель летательного аппарата имеет шарниры для крепления гибких тросовых подвесок для подвешивания модели в рабочей части трубы и подведения электропитания к автомату отклонения рулей и сигнальным лампочкам.
Недостатками устройства для осуществления известного способа, а также способа определения характеристик штопора модели летательного аппарата являются:
- невозможность определения траектории движения модели ЛА в поле вертикальной аэродинамической трубы, а возможность определения только углового положения и угловых скоростей модели;
- невозможность определения траектории, угловых положений и скоростей модели ЛА в реальном масштабе времени;
- невозможность введения и моделирования законов управления для модели ЛА, соответствующих реальным законам системы дистанционного управления ЛА в штопоре;
- длительность процесса обработки результатов испытаний и отсутствие оперативности в получении характеристик штопора и методов выхода из него;
- сравнительно высокая стоимость проведения всего цикла исследований и получения характеристик штопора и методов вывода из него;
- сравнительно невысокая точность определения характеристик штопора.
Задачами предлагаемых способа и устройства являются:
- возможность определения как углового положения и угловых скоростей модели ЛА, так и ее траектории в поле вертикальной аэродинамической трубы в реальном масштабе времени;
- возможность введения и моделирования законов управления для модели ЛА, соответствующих реальным алгоритмам системы дистанционного управления ЛА в штопоре;
- снижение длительности процесса обработки результатов испытаний и повышение оперативности в получении характеристик штопора ЛА и выработки методов выхода из него при моделировании реальных законов управления системы дистанционного управления ЛА в штопоре;
- повышение производительности работы аэродинамической трубы при исследовании штопора и всего цикла исследований;
- снижение стоимости проведения всего цикла исследований и получения характеристик штопора ЛА и методов выхода из него;
- повышение точности определения характеристик штопора.
Технический результат заключается в:
- расширении возможности определения всех динамических характеристик штопора модели ЛА и методов вывода из него путем введения реальных законов управления ЛА в штопоре и их оптимизации в реальном масштабе времени;
- повышении достоверности моделирования законов управления в штопоре за счет использования реальных законов управления;
- повышении оперативности в определении характеристик штопора и производительности работы аэродинамической трубы;
- повышении точности определения характеристик штопора и методов вывода из него.
Решение поставленной задачи и технический результат достигаются тем, что в способе определения характеристик штопора модели летательного аппарата, основанном на запуске в поток вертикальной аэродинамической трубы, геометрически и динамически подобной свободно штопорящей модели летательного аппарата, определении момента взвешивания модели в потоке, определении зависимости по времени t динамических (штопорных) характеристик модели летательного аппарата и отклонения каждого из n рулей на углы δn(t), выведении модели из потока, внутри модели летательного аппарата размещают бесплатформенное инерциальное измерительное устройство, сервомеханическую систему управления отклонением рулей модели и измерения их положения, сигналы от которых по линиям связи направляют в управляющий вычислительный модуль, затем модель соединяют с элементами подвески и устанавливают на опорном координатном столе, при этом положение осей системы координат, связанной с моделью, привязывают к осям стартовой системы координат опорного стола, жестко связанной с опорным столом, фиксируют положение опорного стола относительно аэродинамической трубы и поточной системы координат; непосредственно перед запуском модели в воздушный поток подают электропитание на инерциальное измерительное устройство, управляющий вычислительный модуль, сервомеханическую систему управления отклонением рулей и измерения их положения, а также на датчик взвешивания модели; записывают во внутреннюю память управляющего вычислительного модуля алгоритм управления полетом модели и включают периодическую регистрацию в память управляющего вычислительного модуля положения рулей и инерциальных параметров, поступающих от бесплатформенного инерциального устройства в управляющий вычислительный модуль, полученные инерциальные параметры сохраняют во внутренней памяти вычислительного управляющего модуля или, в случае использования радиоканала в качестве устройства связи, передают на компьютер экспериментатора, затем снимают модель с опорного координатного стола и, придавая ей вращательное движение, запускают модель в воздушный поток аэродинамической трубы, в течение полета модели вычислительный управляющий модуль периодически контролирует состояние датчика взвешивания и при обнаружении стабильного взвешенного состояния модели в воздушном потоке начинает выполнение заданного алгоритма управления полетом; при этом вычислительный управляющий модуль выдает управляющие сигналы на сервоприводы рулей и элеронов модели и периодически регистрирует во внутренней памяти или передает компьютеру экспериментатора текущее положение рулей; после завершения полета модели летательного аппарата и вывода ее из потока, при отсутствии радиосвязи с моделью, накопленные данные считывают из памяти вычислительного модуля и на компьютере экспериментатора рассчитывают и строят полученные характеристики штопора.
Решение поставленной задачи и технический результат достигаются также тем, что в память управляющего вычислительного модуля записывают алгоритм обнаружения сваливания в штопор и закон управления полетом, препятствующий сваливанию в штопор.
Решение поставленной задачи и технический результат достигаются также тем, что питание бортовой системы модели осуществляют через подвеску.
Решение поставленной задачи и технический результат достигаются также тем, что бортовая система может питаться от аккумулятора.
Решение поставленной задачи и технический результат достигаются также тем, что устройство для определения характеристик штопора модели, содержащее геометрически и динамически подобную модель летательного аппарата, систему световой сигнализации, автомат отклонения рулей модели, подвеску для крепления и размещения модели в рабочей части аэродинамической трубы, содержит вычислительный управляющий модуль, опорный координатный стол, положение которого фиксировано относительно аэродинамической трубы и поточной системы координат, с расположенными на нем устройствами удержания модели, причем внутри модели установлены бесплатформенное инерциальное устройство, устройство связи с компьютером, бортовая система световой сигнализации, сервомеханическая система управления рулями модели и измерения их положения, которые соединены между собой и с вычислительным управляющим модулем линиями связи для передачи сигналов и бортовой системой питания.
Решение поставленной задачи и технический результат достигаются также тем, что управляющий вычислительный модуль размещают внутри модели.
Решение поставленной задачи и технический результат достигаются также тем, что управляющий вычислительный модуль размещают вне модели.
Реализация предложенных способа и устройства для определения характеристик штопора модели ЛА поясняется на фиг.1-4, на которых, в частности, представлены:
на фиг.1 - фотография экспериментального образца модели, с помощью которой реализуется предложенный способ;
на фиг.2 - блок-схема бортовой внутримодельной системы;
на фиг.3 - схема проведения экспериментальных исследований по определению характеристик штопора в вертикальной аэродинамической трубе;
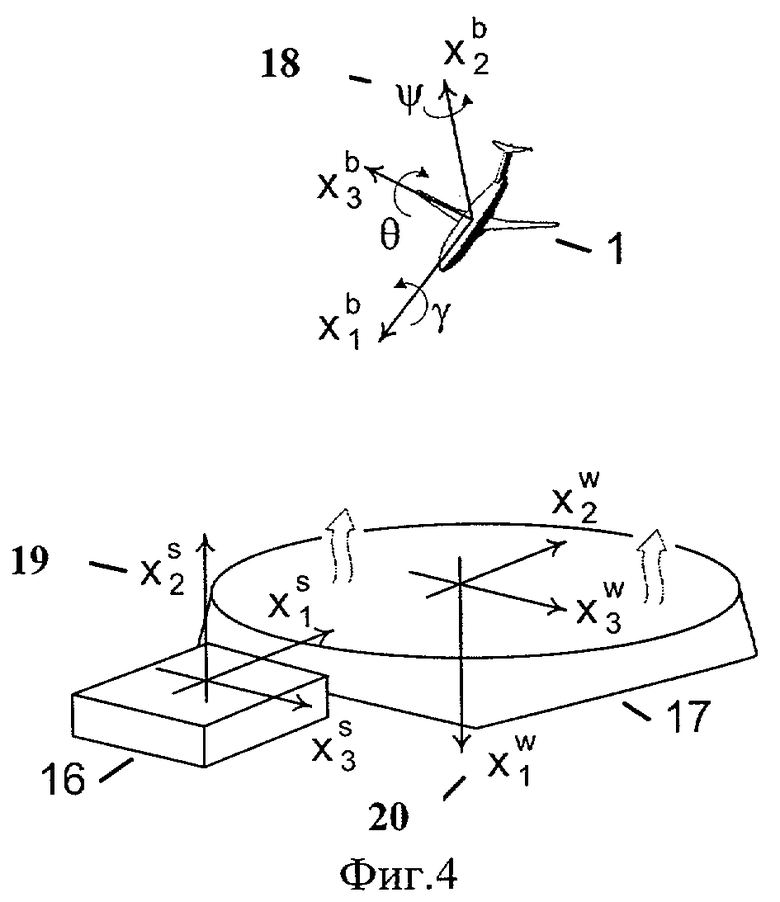
на фиг.4 - схема расположения осей координат, связанных с моделью, и поточная система координат.
Перечень используемых позиций в описании изобретений.
I. Модель летательного аппарата.
2. Бесплатформенное инерциальное измерительное устройство.
3. Вычислительный управляющий модуль.
4. Устройство связи с компьютером экспериментатора.
5. Система световой сигнализации.
6-10. Сервомеханическая система управления отклонением рулей модели (сервоприводы рулей и элеронов модели) и их положения.
11. Датчик взвешивания модели.
12. Бортовая система питания.
13-15. Подвеска для крепления и размещения модели в рабочей части аэродинамической трубы
16. Опорный координатный стол.
17. Рабочая часть вертикальной аэродинамической трубы.
18. Связанная система координат модели.
19. Стартовая система координат опорного стола.
20. Поточная система координат аэродинамической трубы.
Предлагаемый способ реализуется с помощью устройства для определения штопорных характеристик модели летательного аппарата 1 (фиг.1, фиг.2), содержащего бесплатформенное инерциальное измерительное устройство 2, вычислительный управляющий модуль 3, устройство связи с компьютером экспериментатора 4, бортовую систему световой сигнализации 5, состоящую из импульсных излучателей, сервомеханическую систему управления отклонением рулей модели и измерения их положения 6-10, датчик взвешивания модели 11, которые соединены с бортовой системой питания 12. Все элементы устройства устанавливаются внутри модели 1, датчик взвешивания 11 устанавливается на шарнирном креплении модели с подвеской. Вычислительный управляющий модуль 3 соединен линиями связи для передачи сигналов на бортовую систему световой сигнализации 5, сервомеханическую систему управления отклонением рулей модели и измерения их положения 6-10 и для приема сигналов от бесплатформенного инерциального измерительного устройства 2 и датчика взвешивания модели 11. С устройством связи с компьютером экспериментатора устанавливается двусторонняя связь как для передачи, так и для приема сигналов.
Система световой сигнализации 5 обеспечивает оповещение экспериментатора о моменте взвешивания модели в воздушном потоке, определяемого с помощью датчика взвешивания 11, и о моментах отклонения рулей модели, выполняемых сервоприводами 6-10. Система может выдавать непрерывный световой сигнал с помощью светоизлучающих приборов, располагаемых на подвеске, или проблесковый световой сигнал с помощью импульсных излучателей, закрепленных на корпусе модели (бортовая система световой сигнализации). Выбор вида световой сигнализации определяется источником электроэнергии для бортовой системы питания: если питание к модели подводится через подвеску, то применяется непрерывная световая сигнализация, если используется автономное питание от аккумулятора, то - менее энергопотребляющая проблесковая световая сигнализация. В качестве устройства связи модели с компьютером экспериментатора может быть использован любой тип проводного или беспроводного интерфейса. Единственными требованиями к нему являются достаточно высокая скорость передачи данных и возможность передачи данных на расстоянии.
Определение характеристик штопора модели летательного аппарата предлагаемым способом выполняется следующим образом. Сначала снабжают модель 1 летательного аппарата устанавливающимся внутри нее бесплатформенным инерциальным измерительным устройством 2, сервомеханической системой управления 6-10 (в виде сервоприводов) отклонения рулей модели и измерения их положения, сигналы от которых по линиям связи передаются в управляющий вычислительный модуль 3, который может располагаться как внутри модели, так и вне ее. Модель 1 соединяют с элементами подвески 13, 14, 15 и размещают на опорном координатном столе 16 в непосредственной близости к соплу вертикальной аэродинамической трубы 17 (фиг.3). При этом положение осей системы координат 18, связанной с моделью, (фиг.4) однозначно привязывается к осям стартовой системы координат 19 опорного стола, жестко связанной с опорным столом 16 и с расположенными на нем устройствами удержания модели. Положение опорного стола 16 фиксировано относительно аэродинамической трубы 17 и поточной системы координат 20. Знание положения опорного стола относительно поточной системы координат и исходного положения модели на опорном столе позволяет определить положение и поворот модели в воздушном потоке во время ее свободного полета. Непосредственно перед запуском модели 1 в воздушный поток вертикальной аэродинамической трубы 17 экспериментатор подает электропитание от системы питания 12 на инерциальное измерительное устройство 2, управляющий вычислительный модуль 3, систему управления отклонением рулей (сервоприводы) и измерения их положения 6-10, на датчик 11 взвешивания модели. Записывает во внутреннюю память управляющего вычислительного модуля 3 алгоритм управления полетом модели и включает периодическую регистрацию в память управляющего вычислительного модуля 3 положения рулей и инерциальных параметров, поступающих от бесплатформенного инерциального устройства 2 в управляющий вычислительный модуль 3. В качестве закона управления полетом может быть записан алгоритм, препятствующий сваливанию в штопор, а также алгоритм обнаружения признаков сваливания. Полученные инерциальные параметры сохраняются во внутренней памяти вычислительного управляющего модуля 3 или, в случае использования радиоканала в качестве устройства связи 4, передаются на компьютер экспериментатора. Затем экспериментатор снимает модель 1 с опорного координатного стола 16 и, придавая модели вращательное движение, запускает ее в воздушный поток аэродинамической трубы 17. В течение полета модели вычислительный управляющий модуль 3 периодически контролирует состояние датчика взвешивания 11 и при обнаружении стабильного взвешенного состояния модели в воздушном потоке начинает выполнение заданного алгоритма управления полетом. При этом вычислительный управляющий модуль 3 выдает управляющие сигналы на сервоприводы рулей и элеронов модели 6-10 и периодически регистрирует во внутренней памяти или передает компьютеру экспериментатора текущее положение рулей. После завершения полета модели летательного аппарата и выводе ее из потока, при отсутствии радиосвязи с моделью, накопленные данные считывают из памяти вычислительного модуля и на компьютере экспериментатора рассчитывают и строят полученные характеристики штопора. При разработке методов пилотирования в штопоре алгоритм управления полетом модели представляет собой последовательность отклонения рулей и элеронов модели на заданные углы. При разработке и оптимизации законов управления, препятствующих штопору, алгоритм управления полетом модели описывает разрабатываемый закон стабилизации полета модели.
Таким образом, при экспериментальных исследованиях свободного штопора в аэродинамической трубе в реальном времени определяются характеристики штопора моделей летательных аппаратов. Это, наряду с введением реальных законов управления, позволяет оперативно разрабатывать методы пилотирования в штопоре, выхода из штопора, а также методы, препятствующие развитию штопора. Введение реальных законов управления позволяет реализовать не только релейные, как в прототипе, но и реальные законы управления на закритических (штопорных) углах атаки. Это существенно расширяет возможности определения всех динамических характеристик штопора и повышает достоверность полученных результатов.
В настоящее время выполнен экспериментальный образец модели ЛА, с помощью которого реализуется предлагаемый способ определения характеристик штопора (фиг.1). Апробирование этого способа показало возможность получения характеристик штопора в реальном масштабе времени, что недостижимо в способе-прототипе, поскольку он связан с длительной покадровой расшифровкой кинопленки на специальном теневом приборе. Если в способе-прототипе реальный цикл определения характеристик штопора для типовой программы исследований на штопор после ее завершения занимал 2,5-3 месяца, то в предлагаемом способе это происходит практически мгновенно. Кроме того, в способе-прототипе точность определения характеристик штопора связана со многими субъективными факторами, зависящими от оператора, который производит расшифровку (совмещение изображения свободно штопорящей модели с кинопленки с тенью от макета модели, расположенной в карданном подвесе и т.д.), и не превышает 1,5÷2° по углам атаки и скольжения. В отличие от этого в предлагаемом способе точность определения характеристик штопора определяется свойствами инерциального модуля, в частности точностью его градуировочных характеристик и их дрейфом во времени. Поскольку время движения модели в режиме штопора не превышает 2-3 минут, то по реальным результатам экспериментов точность определения углов составляет ~0,25°. Тем самым достигается существенное повышение оперативности и точности определения характеристик штопора модели летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЕТНОГО ЭКСПЕРИМЕНТА | 2022 |
|
RU2790358C1 |
| Многоцелевой резервный контур взаимодействия "лётчик-самолет" для лётных испытаний высокоавтоматизированных и беспилотных авиационных комплексов | 2020 |
|
RU2743236C1 |


Изобретения относятся к экспериментальной аэродинамике, в частности к определению характеристик штопора геометрически и динамически подобной свободно летающей модели летательного аппарата (ЛА) в воздушном потоке вертикальной аэродинамической трубы. Способ заключается в запуске в поток вертикальной аэродинамической трубы, геометрически и динамически подобной свободно штопорящей модели летательного аппарата, определении момента взвешивания модели в потоке, определении зависимости по времени динамических характеристик модели летательного аппарата и отклонения каждого из рулей на углы, выведении модели из потока. При этом снабжают модель летательного аппарата установленным внутри бесплатформенным инерциальным измерительным устройством, системой управления отклонением рулей модели и измерения их положения, сигналы от которых по линиям связи передаются в управляющий вычислительный модуль. Перед началом испытаний устанавливают модель на опорный координатный стол, задающий начальное положение модели относительно рабочей части аэродинамической трубы. Затем включают периодическую регистрацию в память управляющего вычислительного модуля положения рулей и пространственного положения модели и выполняют автоматически в течение полета с помощью управляющего вычислительного модуля любой заданный алгоритм управления полетом. Считывают после завершения полета полученные характеристики штопора модели летательного аппарата, рассчитывают и строят полученные характеристики штопора. Технический результат заключается в расширении возможностей определения всех динамических характеристик штопора модели ЛА и методов вывода из него, повышении достоверности моделирования законов управления в штопоре, повышении оперативности в определении характеристик штопора и производительности работы аэродинамической трубы, а также в повышении точности определения характеристик штопора и методов вывода из него. 2 н. и 5 з.п. ф-лы, 4 ил.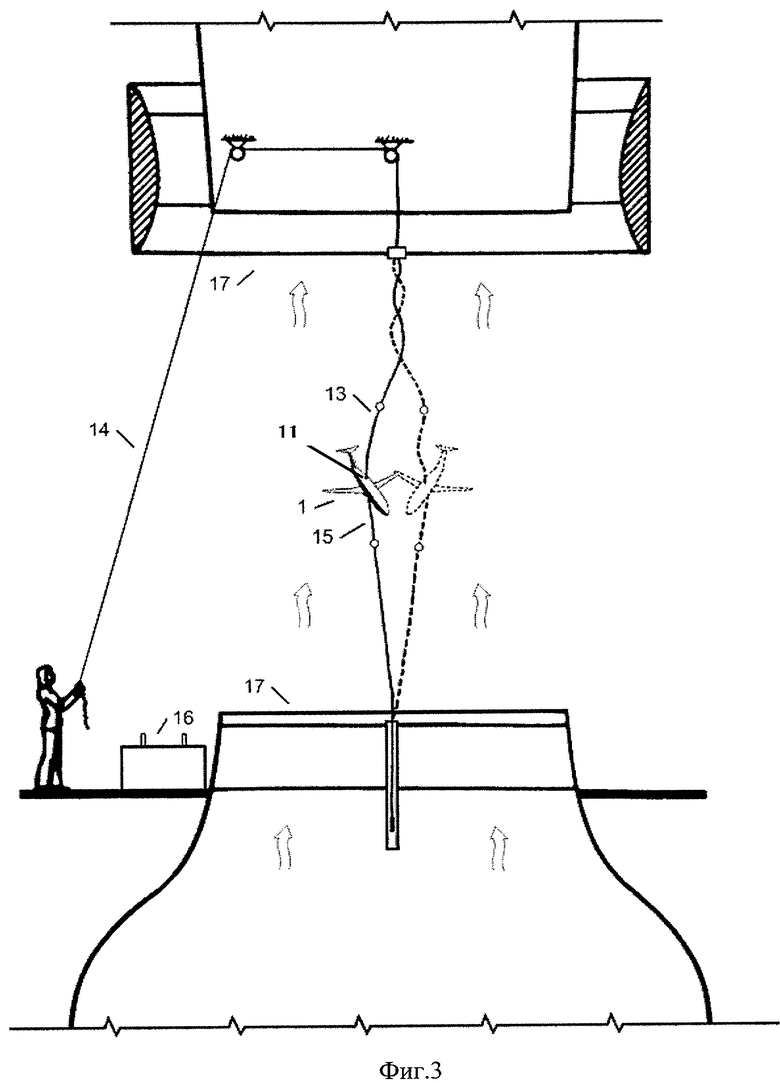
1. Способ определения характеристик штопора модели летательного аппарата, основанный на запуске в поток вертикальной аэродинамической трубы геометрически и динамически подобной модели летательного аппарата, регистрации момента взвешивания модели в потоке, определении зависимости по времени t динамических (штопорных) характеристик модели летательного аппарата и отклонения каждого из n рулей на углы δn(t), выведении модели из потока, отличающийся тем, что внутри модели летательного аппарата размещают бесплатформенное инерциальное измерительное устройство, сервомеханическую систему управления отклонением рулей модели и измерения их положения, сигналы от которых по линиям связи направляют в управляющий вычислительный модуль, затем модель соединяют с элементами подвески и устанавливают на опорном координатном столе, при этом положение осей системы координат, связанной с моделью, привязывают к осям стартовой системы координат опорного стола, жестко связанной с опорным столом, фиксируют положение опорного стола относительно аэродинамической трубы и поточной системы координат; непосредственно перед запуском модели в воздушный поток подают электропитание на инерциальное измерительное устройство, управляющий вычислительный модуль, сервомеханическую систему управления отклонением рулей и измерения их положения, а также на датчик взвешивания модели; записывают во внутреннюю память управляющего вычислительного модуля алгоритм управления полетом модели и включают периодическую регистрацию в память управляющего вычислительного модуля положения рулей и инерциальных параметров, поступающих от бесплатформенного инерциального устройства в управляющий вычислительный модуль, полученные инерциальные параметры сохраняют во внутренней памяти вычислительного управляющего модуля или, в случае использования радиоканала в качестве устройства связи, передают на компьютер экспериментатора, затем снимают модель с опорного координатного стола и, придавая ей вращательное движение, запускают модель в воздушный поток аэродинамической трубы; в течение полета модели вычислительный управляющий модуль периодически контролирует состояние датчика взвешивания и при обнаружении стабильного взвешенного состояния модели в воздушном потоке начинает выполнение заданного алгоритма управления полетом, при этом вычислительный управляющий модуль выдает управляющие сигналы на сервоприводы рулей и элеронов модели и периодически регистрирует во внутренней памяти или передает компьютеру экспериментатора текущее положение рулей; после завершения полета модели летательного аппарата и вывода ее из потока при отсутствии радиосвязи с моделью накопленные данные считывают из памяти вычислительного модуля и на компьютере экспериментатора рассчитывают и строят полученные характеристики штопора.
2. Способ по п.1, отличающийся тем, что в память управляющего вычислительного модуля записывают алгоритм обнаружения момента сваливания в штопор и закон управления полетом, препятствующий сваливанию.
3. Способ по п.1, отличающийся тем, что питание бортовой системы модели осуществляют через подвеску.
4. Способ по п.1, отличающийся тем, что бортовую систему запитывают от аккумулятора.
5. Устройство для определения характеристик штопора, содержащее геометрически и динамически подобную модель летательного аппарата, подвеску для крепления и размещения модели в рабочей части аэродинамической трубы, систему световой сигнализации, автомат отклонения рулей модели, отличающееся тем, что устройство содержит управляющий вычислительный модуль, опорный координатный стол, положение которого фиксировано относительно аэродинамической трубы и поточной системы координат, с расположенными на нем устройствами удержания модели, причем внутри модели установлены бесплатформенное инерциальное устройство, устройство связи с компьютером, бортовая система световой сигнализации, сервомеханическая система управления рулями модели и измерения их положения, которые соединены между собой линиями связи для передачи сигналов и бортовой системой питания.
6. Устройство по п.5, отличающееся тем, что управляющий вычислительный модуль размещают вне модели.
7. Устройство по п.5, отличающееся тем, что управляющий вычислительный модуль размещают внутри модели.
| Авиация общего назначения | |||
| Рекомендации для конструкторов | |||
| / Под ред | |||
| д.т.н., проф | |||
| В.Г.Микеладзе | |||
| - М.: ЦАГИ, 2001, с.272-276 | |||
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК ШТОПОРА САМОЛЁТА | 2002 |
|
RU2226680C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ХАРАКТЕРИСТИК ШТОПОРА САМОЛЕТА | 2002 |
|
RU2227279C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| CN 101387570 А, 18.03.2009 | |||
| Тетерюков Я.И | |||
| Штопор самолетов | |||
| - М.: Оборонгиз, 1954 | |||
| Котик М.Г | |||
| Динамика штопора самолета | |||
| - М.: Машиностроение, 1976. | |||

