Область техники
Изобретение относится к гибочному прессу со столами для регулируемой деформации.
Уровень техники
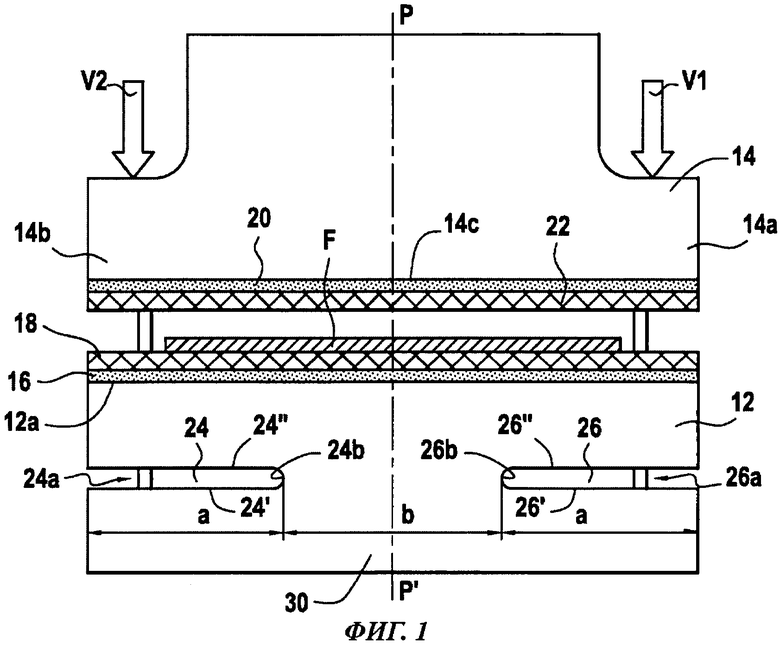
Гибочные прессы являются станками, которые сами по себе хорошо известны. Как это показано на фиг.1, станок содержит нижний стол 12 и верхний стол 14, подвижный относительно стола 12. Чаще всего нижний стол 12 выполнен неподвижным, а верхний стол 14 может придвигаться к нижнему столу под действием силовых цилиндров V1 и V2, которые воздействуют на концы 14а и 14b верхнего стола 14. Чаще всего нижний стол 12 имеет свободную кромку 12а, снабженную крепежными средствами 16 для гибочных матриц 18. Таким же образом кромка 14 с верхнего стола 14 снабжена крепежными средствами 20 для гибочных пуансонов 22.
Металлический лист или листовой металл F укладывают на гибочные матрицы 18 нижнего стола 12. Листовой металл F может иметь самую различную длину в зависимости от назначения. Под действием поршней цилиндров V1 и V2 установленные на верхнем столе пуансоны 22 приближаются к металлическому листу или листовому металлу F, уложенному на матрицах нижнего стола. После контакта пуансона 22 с листовым металлом сила давления начинает увеличиваться, и пуансон задавливается в листовой металл F, деформируя его вначале в области упругой деформации, а затем в области пластической деформации, что позволяет получить окончательный изгиб листового металла.
Вследствие того, что усилие передается верхнему столу 14 цилиндрами V1 и V2, которые воздействуют на концы этого стола, линейная нагрузка, распределенная между двумя концами столов, соответствует линии деформации верхнего стола в форме вогнутой дуги с максимумом деформации вблизи средней плоскости стола. Это означает, что в конце процесса гибки центральная группа пуансонов 22 задавливается в листовой металл F меньше, чем концевые группы. Если гибку производят на матрице, которая при гибке остается идеально прямолинейной, получают изделие с более открытым углом изгиба в центральной части, чем на концах. Разумеется, такой результат неприемлем.
Для устранения этого недостатка предлагались различные решения, направленные на управление деформацией кромок столов с помощью различных средств с целью получения равномерной гибки по всей длине изогнутого изделия.
Традиционно эти решения предусматривают выполнение прорезей, таких как прорези 24 и 26, показанные на фиг.1, выполненных в нижнем столе 12 симметрично относительно средней плоскости РР' пресса. Эти прорези 24, 26 определяют между собой центральную зону 30 нижнего стола 12, в которой нет прорезей и которая имеет длину b, при этом каждая прорезь 24 и 26 имеет длину а. При наличии прорезей 24 и 26 классического типа, то есть оставляющих между собой часть 30 длиной b без прорезей, получают, по существу, параллельные линии деформации кромок верхнего стола 14 и нижнего стола 12.
Таким образом, трудность состоит в том, чтобы создать гибочный пресс, способный обеспечивать, по существу, равномерную деформацию подлежащего гибке металлического листа или листового металла F по всей его длине, когда его длина невелика относительно длины столов 12, 14 пресса, или наоборот, когда его длина равна длине столов 12, 14 пресса. Дополнительная трудность связана с тем, что до сих пор плохо удавалось регулировать деформацию верхних кромок 24'', 26'' прорезей 24, 26 во время приложения усилия гибки верхним подвижным столом 14 к нижнему неподвижному столу 12 и восприятие этого усилия нижними кромками 24', 26' прорезей 24, 26.
Раскрытие изобретения
Задачей изобретения является решение этих двух проблем за счет использования, по меньшей мере, одной пары клиньев с расположением каждого клина в одной из прорезей 24, 26. Решение по изобретению отличается также тем, что содержит общее регулировочное средство для клиньев из указанной пары клиньев, способное перемещать эти клинья из пары клиньев в соответствующих прорезях 24, 26 для лучшей настройки восприятия усилия.
Таким образом, изобретение относится к гибочному прессу для гибки, по меньшей мере, одного металлического листа, содержащему верхний стол, нижняя кромка которого несет первые гибочные инструменты, и нижний стол, верхняя кромка которого несет вторые гибочные инструменты, причем два стола выполнены подвижными относительно друг друга для передачи усилия гибки на металлический лист, причем один из указанных столов снабжен двумя прорезями, и каждая прорезь имеет первую кромку и вторую кромку, а также первый открытый конец, выходящий на боковую кромку стола, и закрытый конец, отличающемуся тем, что дополнительно содержит по меньшей мере, одну пару клиньев, каждый клин которой расположен соответственно в одной из двух прорезей, и регулировочное средство, общее для клиньев пары клиньев, выполненное с возможностью перемещения указанных клиньев пары клиньев в их соответствующих прорезях, причем регулировочное средство содержит основной управляющий рычаг для совместного перемещения двух клиньев пары клиньев, предпочтительно на одинаковое расстояние.
Согласно одному примеру осуществления каждый клин пары клиньев связан с основным управляющим рычагом посредством, по меньшей мере, одной тяги.
Согласно одному примеру осуществления регулировочное средство перемещает клинья пары клиньев в противоположных направлениях. В этом случае тяги, которые связывают соответственно два клина пары клиньев с основным управляющим рычагом, присоединены к этому рычагу с двух сторон от центра поворота этого рычага.
Согласно другому примеру осуществления регулировочное средство перемещает клинья пары клиньев в одном и том же направлении. В этом случае тяги, которые связывают соответственно два клина пары клиньев с основным управляющим рычагом, присоединены к этому рычагу с одной и той же стороны от центра поворота этого рычага.
Предпочтительно гибочный пресс по изобретению содержит, по меньшей мере, две пары клиньев, причем два клина каждой пары клиньев расположены соответственно в каждой из двух прорезей.
Согласно аспекту изобретения клинья двух пар клиньев перемещаются основным управляющим рычагом.
Согласно созданной изобретением возможности гибочный пресс помимо основного управляющего рычага, выполненного с возможностью перемещения клиньев первой пары клиньев, дополнительно содержит вспомогательный управляющий рычаг, выполненный с возможностью перемещения клиньев второй пары клиньев. В этом примере осуществления вспомогательный управляющий рычаг связан с основным управляющим рычагом таким образом, что положение вспомогательного управляющего рычага относительно основного управляющего рычага может регулироваться, при этом при приводе в действие основного управляющего рычага клинья первой и второй пары клиньев могут перемещаться совместно.
Согласно особенно выгодному аспекту изобретения регулировочное средство выполнено с возможностью перемещения первой пары клиньев на первое расстояние и второй пары клиньев на второе расстояние, причем первое и второе расстояния пропорциональны друг другу.
Предпочтительно основной управляющий рычаг и вспомогательный управляющий рычаг установлены с возможностью поворота вокруг одного и того же центра поворота.
Согласно выгодному аспекту изобретения каждый клин этой, по меньшей мере, одной пары клиньев образует со вторым неподвижным клином упорный узел.
В этом случае предпочтительно каждый клин этой, по меньшей мере, одной пары клиньев имеет первый конец, жестко соединенный с первой кромкой прорези, и второй конец, образующий контактную поверхность клина, с помощью которой клин образует упорный узел.
Согласно выгодному аспекту изобретения прорези имеют постоянную высоту, по меньшей мере, в зоне клиньев, так что первые кромки и вторые кромки параллельны при отсутствии усилия гибки на металлическом листе.
Предпочтительно контактная поверхность, по меньшей мере, одного из клиньев каждого упорного узла является наклонной, причем уклон составляет от 1% до 40%, предпочтительно от 5% до 10% относительно параллельных кромок прорезей.
Согласно примеру осуществления гибочный пресс по изобретению имеет вертикальную среднюю плоскость РР', при этом две прорези расположены симметрично относительно этой средней плоскости. Предпочтительно две прорези проходят по всей толщине стола.
Другие особенности и преимущества изобретения будут ясны из последующего описания.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны предпочтительные примеры осуществления изобретения, не имеющие ограничительного характера.
На чертежах:
фиг.1 изображает гибочный пресс с двумя прорезями, расположенными с двух сторон симметрично относительно средней плоскости РР' пресса и проходящими от противоположных боковых сторон нижнего стола,
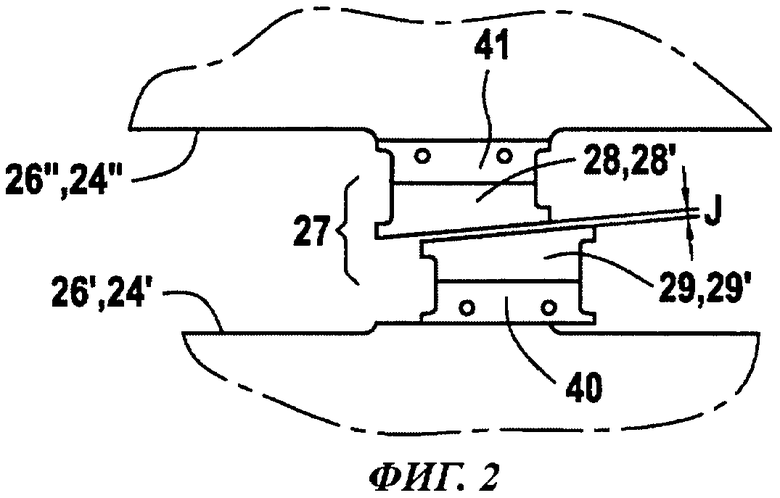
фиг.2 схематично изображает упорный узел, образованный двумя клиньями, из которых один соединен с верхней кромкой прорези, а другой соединен с нижней кромкой прорези,
фиг.3 схематично изображает гибочный пресс в соответствии с первым примером осуществления изобретения,
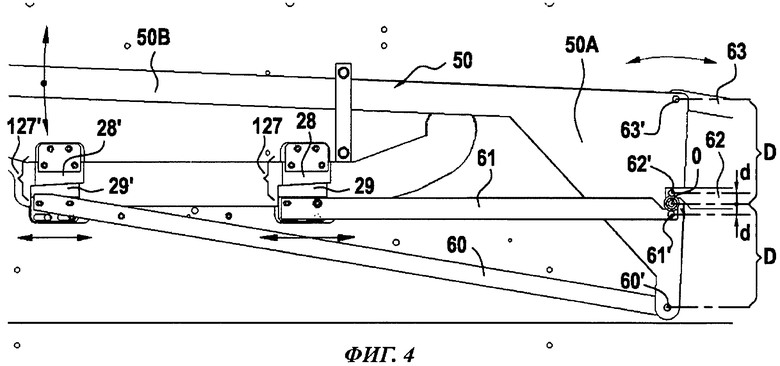
фиг.4 изображает в увеличенном виде часть гибочного пресса по фиг.3,
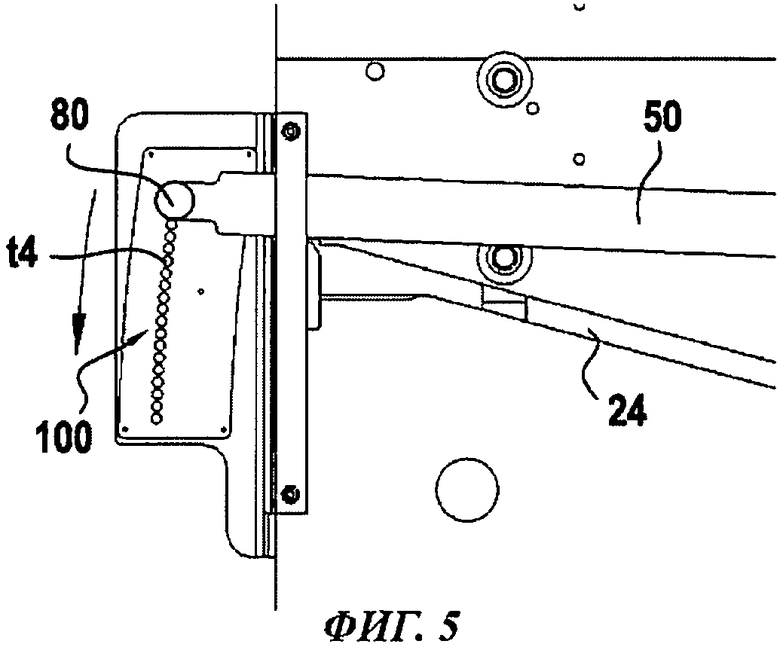
фиг.5 изображает в увеличенном виде другую часть гибочного пресса по фиг.3,
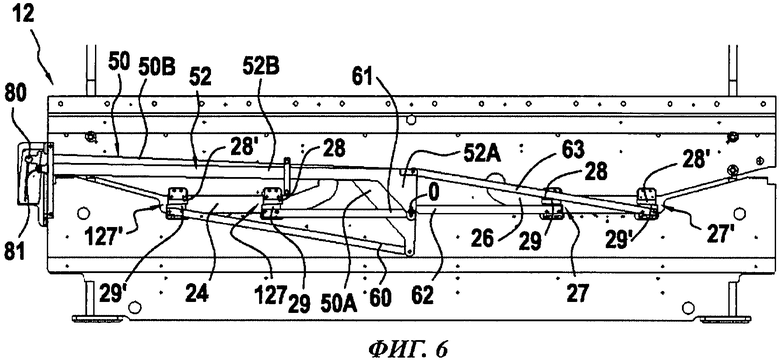
фиг.6 изображает часть гибочного пресса в соответствии со вторым примером осуществления изобретения,
фиг.7 изображает в увеличенном виде часть гибочного пресса по фиг.6,
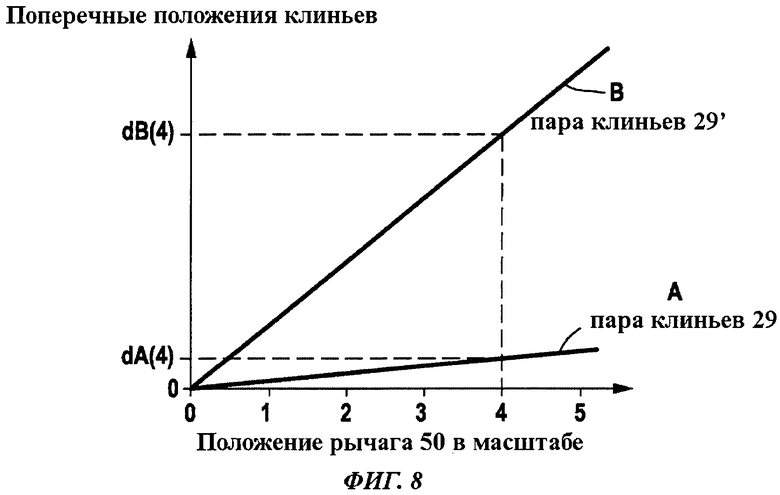
фиг.8 изображает диаграмму, иллюстрирующую поперечные положения двух пар упоров как функцию положения основного управляющего рычага в соответствии с первым примером осуществления по фиг.3-5,
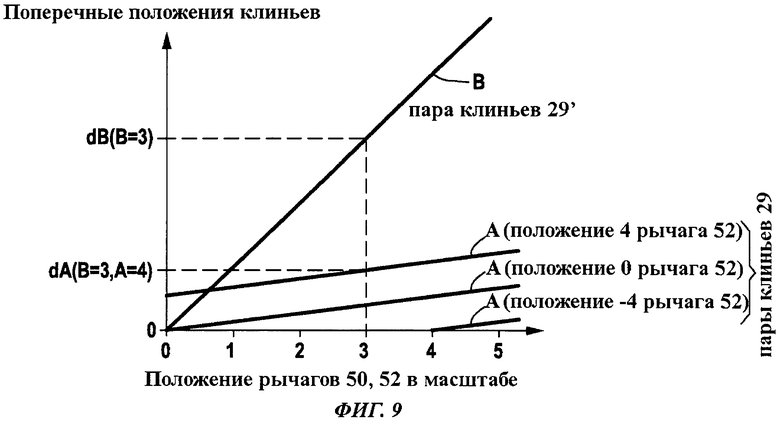
фиг.9 изображает диаграмму, иллюстрирующую поперечные положения двух пар упоров как функцию положения двух управляющих рычагов, основного и вспомогательного, в соответствии со вторым примером осуществления по фиг.6 и 7.
Осуществление изобретения
Как это иллюстрирует фиг.3, под выражением «пара клиньев» 29 имеется в виду один клин 29, расположенный в прорези 24, и один клин 29, расположенный в прорези 26. В данном примере выполнения предусмотрена также вторая пара клиньев 29' с одним клином 29' в прорези 24 и одним клином 29' в прорези 26. Клинья 29 расположены ближе к центральной части 30, чем клинья 29'. В данном примере выполнения каждый клин 29 или 29' связан с другим клином соответственно 28 или 28'.
На фиг.2 показаны в разрезе два клина 28, 29 упора 27 по изобретению. Каждый из двух клиньев 28, 29 имеет первую контактную поверхность напротив контактной поверхности другого клина 28', 29'. Перед приложением усилия гибки зазор J разделяет эти соответствующие контактные поверхности. Показанные на фиг.2 клинья 28, 29 иллюстрируют пример выполнения клиньев, которые могут использоваться в изобретении, однако изобретение не ограничивается этим типом клиньев.
Каждый из клиньев 28, 28', 29, 29' установлен на опоре 40, 41, связанной с кромкой 24', 26' или 24'', 26'' прорези 24 или 26. Функцией каждого клина 28, 28', 29, 29' / упора 27 является регулирование сближения кромок 24', 24'' и 26', 26'' каждой прорези 24, 26 при приложении усилия гибки. Путем регулирования сближения кромок 24', 24'' и 26', 26'' прорези 24 или 26 регулируют деформацию верхней кромки 24'', 26'' прорези 24 или 26 и, следовательно, деформацию верхней кромки 12а нижнего стола 12.
По меньшей мере, одна из опор 40 или 41, а при определенных условиях обе опоры 40 и 41 выполнены с возможностью поперечного перемещения, то есть перемещения вдоль оси, параллельной параллельным кромкам 24', 26' и 24'', 26'' прорези 23, 26, на которой они установлены.
В примерах выполнения, выбранных для иллюстрации изобретения на чертежах, только опоры 40 выполнены с возможностью перемещения посредством регулировочного средства, но очевидно, что опоры 41 клиньев 28 или 28' также могут быть выполнены подвижными. Однако следует заметить, что важным здесь является относительное позиционирование двух клиньев 28, 29 или 28', 29', которые принадлежат одному и тому же упору и предназначены для контакта друг с другом, так что путем перемещения только одного из них, 28, 28' или 29, 29' получают регулировку относительного положения клиньев 28, 29 или 28', 29' для оптимальной передачи усилий от одного клина на другой. Относительное положение двух клиньев 28, 29 или 28', 29' предназначенных для контакта друг с другом, может регулироваться с точностью до сотых долей миллиметра как для клиньев, так и для пар клиньев благодаря регулировочному средству в соответствии с изобретением.
Первая задача изобретения заключается в симметричном перемещении двух клиньев одной пары клиньев 29, 29', то есть в том, чтобы приближение или удаление одного клина пары клиньев 29, 29' относительно средней плоскости РР' преобразовывалось в точное идентичное приближение или удаление другого клина пары клиньев 29 или 29'. Решение задачи достигается за счет примера осуществления по фиг.3 и 4.
Показанное на фиг.3 и 4 общее регулировочное средство для перемещения клиньев одной пары клиньев 29 или 29' представляет собой основной управляющий рычаг 50. Этот основной управляющий рычаг 50 содержит головку 50А рычага, которая может шарнирно поворачиваться вокруг оси О, и приводное плечо 50В. Центр О поворота расположен на нижнем столе 12, предпочтительно в средней плоскости РР'. Основной управляющий рычаг 50 приводится в действие на конце 80 приводного плеча 50В, на котором имеется ручка для захвата оператором. Каждый клин пары клиньев 29 и 29' соединен с основным управляющим рычагом 50 соответствующей тягой 60, 61, 62 и 63.
Тяги 61 и 62 одинаковой длины соединяют с основным управляющим рычагом 50 клинья 29 пар клиньев, расположенных ближе к средней плоскости РР'. Каждая из этих двух тяг 61, 62 имеет один конец, прикрепленный к клину 29, и другой конец 61', 62', прикрепленный к головке 50А вблизи оси О поворота. Расстояние d между концом 61', 62' и осью О одинаково и невелико, оно может быть равно, например, 5 мм. В данном примере выполнения концы 61' и 62' прикреплены к головке 50А рычага симметрично по обе стороны от оси О, при этом концы 61', 62' и центр О находятся на одной линии.
Таким же образом тяги 60 и 63 одинаковой длины имеют каждая один конец, прикрепленный к одному из клиньев 29', и другой конец 60', 63', прикрепленный к головке 50А основного управляющего рычага 50 на одинаковом расстоянии D от оси О поворота, равном, например, 40 мм. Два конца 60' и 63' двух тяг 60, 63 расположены подобно концам 61' и 62' тяг 61, 62 по обе стороны от оси О поворота, при этом концы 60', 63' и ось О находятся на одной линии.
Когда основной управляющий рычаг 50 приводится в действие таким образом, что его головка 50А рычага поворачивается на определенный угол, это вызывает поворот концов 60', 63' и 61', 62' соответствующих тяг 60, 63 и 61, 62 таким образом, что тяги 61 и 62 перемещают каждый клин пары клиньев 29 на первое расстояние, а тяги 60, 63 перемещают каждый клин пары клиньев 29' на второе расстояние. Отношение первого расстояния ко второму расстоянию равно отношению D к d. Таким образом, изобретение позволяет регулировать относительное положение клиньев двух пар клиньев 29 и 29' пропорциональным образом.
В данном примере выполнения перемещение тяг 61, 62 и 60, 63 является перемещением приближения или удаления двух клиньев каждой пары клиньев 29 или 29' относительно средней плоскости РР' за счет того, что тяги 61, 62 и 60, 63 установлены соответственно парами, причем концы 60', 63' и 61', 62' тяг каждой пары расположены по обе стороны от оси О поворота. В примере выполнения по фиг.3 и 4 перемещения клиньев каждой пары клиньев 29 и 29' являются симметричными перемещениями, так что клинья пары клиньев 29 и 29' сохраняют симметрию своего положения относительно средней плоскости РР'.
В том гипотетическом примере выполнения, когда концы 61', 62' двух тяг 61, 62 расположены с одной стороны относительно оси О поворота, клинья пары клиньев 29 будут перемещаться в одном направлении, так что если один клин пары клиньев 29 удаляется от средней плоскости РР', другой клин пары клиньев 29 приближается к средней плоскости РР'. Разумеется, такое же расположение концов 60', 63' двух тяг 60, 63 с одной стороны относительно оси О поворота оказало бы такое же воздействие на перемещение каждого клина пары клиньев 29'. В этом примере выполнения, не показанном на чертежах, перемещения пар клиньев 29 и 29'' являются перемещениями, несимметричными относительно средней плоскости РР'.
Предпочтительно положение основного управляющего рычага 50 является индексируемым. Фиг.5 иллюстрирует возможность такой индексации. На фиг.5 подробно показан конец 80 приводного плеча основного управляющего рычага 50. Этот конец 80 приводного плеча основного управляющего рычага 50 содержит ручку, снабженную стержнем, который может быть введен во множество отверстий 100 индексации и при смещении основного управляющего рычага 50 удерживает его в желаемом положении; при этом каждое из отверстий 100 индексации определяет угол поворота основного управляющего рычага 50, а следовательно, и степень его задействования. Конец 80 основного управляющего рычага 50 может приводиться в действие оператором или, при определенных условиях, автоматизированной системой, способной перемещать основной управляющий рычаг 50 путем его поворота.
Фиг.8 иллюстрирует соотношение между положением основного управляющего рычага 50 и перемещением клиньев каждой пары клиньев 29 и 29'. Как видно на диаграмме, основной управляющий рычаг 50 был перемещен из первоначального положения (на фиг.5 соответствует положению 0) в положение 4, например, соответствующее четвертому отверстию t4 индексации (см. фиг.5). При этом клинья пары клиньев 29 переместились на расстояние dA, а клинья пары клиньев 29' переместились на расстояние dB. Перемещения пар клиньев 29 и 29' всегда остаются пропорциональными. Из уравнения k=D/d (см. фиг.4) получаем отношение dB=k×dA. В качестве примера если принять отношение k, равное 8 (d=5 мм, D=40 мм), перемещение клиньев 29 пары клиньев 29, равное 0,4 мм, соответствует перемещению клиньев 29', равному 3,2 мм.
В примере выполнения по фиг.6 и 7 гибочный пресс по изобретению содержит вспомогательный управляющий рычаг 52 в дополнение к основному управляющему рычагу 50. Подобно основному управляющему рычагу 50 вспомогательный управляющий рычаг 52 содержит головку 52А рычага, которая может шарнирно поворачиваться вокруг оси О, и приводное плечо 52В. Этот вспомогательный управляющий рычаг 52 укреплен одним своим концом на оси О поворота основного управляющего рычага 50, а его второй конец 81 укреплен на основном управляющем рычаге 50. Таким образом, ось О поворота является общей для двух рычагов 50 и 52. Тяги 60 и 63 клиньев пары клиньев 29' укреплены на основном управляющем рычаге 50 таким же образом, как в примерах выполнения по фиг.3 и 4 (их концы 60', 63' находятся на расстоянии D от оси О поворота). В отличие от этого тяги 61 и 62 укреплены своими концами 61', 62' на головке 52А вспомогательного управляющего рычага 52 на расстоянии d от оси О поворота. Рычаг 52 может наклоняться относительно рычага 50 таким образом, чтобы изменять проекцию расстояния d на ось А, которая определяется осью О и концом 60' и 63'. Вспомогательный управляющий рычаг 52 может удерживаться в выбранном наклонном положении относительно рычага 50 для того, чтобы привод в действие рычага 50 перемещал одновременно клинья 29 и 29'. Положение рычага 52 относительно основного управляющего рычага 50 может индексироваться системой (отверстия 101 индексации), аналогичной описанной выше системе 100 индексации основного управляющего рычага 50. Таким образом, перемещение поворотом вспомогательного управляющего рычага 52 осуществляется так же, как и перемещение поворотом основного управляющего рычага 50, путем перевода стержня ручки на концах 80, 81 соответственно из одного отверстия индексации в другое отверстие ряда 100, 101 отверстий индексации. Понятно, что перемещение основного управляющего рычага 50 вызывает перемещение вспомогательного управляющего рычага 52, а следовательно, и всех тяг 60, 61, 62 и 63, в то время как перемещение только вспомогательного управляющего рычага 52 вызывает перемещение только тяг 61 и 62.
Следует заметить, что в примере, выбранном для иллюстрации изобретения, имеется девять отверстий индексации для перемещения вспомогательного управляющего рычага 52 относительно основного управляющего рычага 50 (от положения «4» до положения «-4» с проходом через положение 0, в котором два рычага 60 и 52 совмещены), как это упомянуто при ссылке на фиг.9 в соответствии с этим примером осуществления.
Как показано на фиг.9, приводные плечи 50В, 52В рычагов 50, 52 могут быть расположены на одной линии (положение 0 вспомогательного управляющего рычага 52: центральный случай А на фиг.9). В этом случае создается ситуация, в которой имеется единственный основной управляющий рычаг 50 по фиг.3-5 с поперечным перемещением пар клиньев 29 и 29', идентичным представленному на фиг.8. В противоположность этому благодаря вспомогательному управляющему рычагу 52 можно выбрать перемещение исключительно клиньев пары клиньев 29. Так, фиг.9 иллюстрирует кроме положения 0, в котором два приводных плеча 50В, 52В расположены на одной линии, два крайних положения управляющего рычага 52 относительно основного управляющего рычага 50, а именно соответствующие положения «4» и «-4». Возможность перемещения вспомогательного управляющего рычага 52 относительно основного управляющего рычага 50 позволяет изменять отношение пропорциональности между перемещениями клиньев 29 с одной стороны и клиньев 29' с другой стороны.
В этом втором примере выполнения основной управляющий рычаг 50 перемещен из своего первоначального положения (положение 0) в положение «3», что вызывает перемещение в пропорции к каждого из клиньев двух пар клиньев 29 и 29'. Далее, оператор или автоматизированная система имеет возможность перемещать только клинья пары клиньев 29, расположенные ближе к средней плоскости РР', например, путем перевода ручки 81 на конце вспомогательного управляющего рычага 52 из положения «4» в положение «-4» (то есть из одного крайнего положения в другое). В результате при перемещении двух рычагов 50 и 52 пропорциональное перемещение между клиньями двух пар клиньев 29 и 29' уже не будет равно вышеуказанному отношению k, а будет равно отношению (k+γ), где γ является функцией перемещения вспомогательного управляющего рычага 52, способного перемещать только клинья пары клиньев 29.
Следует заметить, что в рамках изобретения может быть предусмотрено, что управляющие рычаги 50 и 52 независимы друг от друга. В этом не показанном примере осуществления основной управляющий рычаг 50 может, например, вызывать поворот только тяг 60, 63, а вспомогательный рычаг 52 вызывает поворот тяг 61, 62.
Хотя изобретение иллюстрировано двумя парами клиньев, причем клинья каждой пары клиньев 29, 29' расположены в каждой из прорезей 24, 26, изобретение применимо для любого числа клиньев пар клиньев, расположенных в каждой из прорезей 24, 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБОЧНЫЙ ПРЕСС ДЛЯ ГИБКИ ЛИСТОВОГО МЕТАЛЛА | 2010 |
|
RU2429096C1 |
| ГИБОЧНЫЙ ПРЕСС ДЛЯ ГИБКИ ЛИСТОВОГО МЕТАЛЛА (ВАРИАНТЫ) | 2010 |
|
RU2433008C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ЛИСТОВ | 1991 |
|
RU2015769C1 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| Способ поперечной гибки профилированного или продольно-гофрированного листового металла и устройство для его осуществления | 1981 |
|
SU1207390A3 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |
| Устройство для гибки деталей из листового материала | 1984 |
|
SU1186319A1 |
| Автомат универсально-гибочный с приводом от центральной шестерни | 1986 |
|
SU1423219A1 |
| Листогибочная валковая машина | 1987 |
|
SU1523213A1 |
| ТРУБОГИБОЧНЫЙ СТАНОК | 1987 |
|
SU1429414A1 |

Изобретение относится к обработке металлов давлением, в частности к гибочному прессу для гибки металлических листов. Пресс содержит верхний стол с первыми гибочными инструментами, нижний стол со вторыми гибочными инструментами. Столы выполнены подвижными относительно друг друга, один из которых снабжен двумя прорезями, в которых расположены клинья. Имеется регулировочное средство, общее для клиньев, выполненное с возможностью перемещения указанных клиньев. При этом регулировочное средство содержит основной управляющий рычаг для совместного перемещения двух клиньев предпочтительно на одинаковое расстояние. Повышается качество гибки. 17 з.п. ф-лы, 9 ил.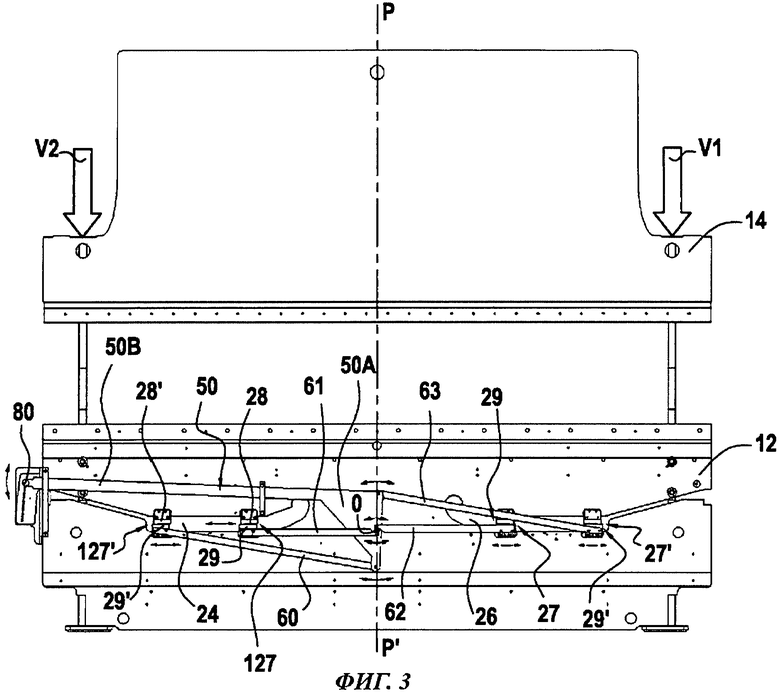
1. Гибочный пресс для гибки, по меньшей мере, одного металлического листа, содержащий верхний стол, нижняя кромка которого несет первые гибочные инструменты, и нижний стол, верхняя кромка которого несет вторые гибочные инструменты, причем два стола выполнены подвижными относительно друг друга для передачи усилия гибки на металлический лист, при этом один из указанных столов снабжен двумя прорезями, и каждая прорезь имеет первую кромку и вторую кромку, а также первый открытый конец, выходящий на боковую кромку стола, и закрытый конец, отличающийся тем, что он дополнительно содержит по меньшей мере, одну пару клиньев, каждый клин которой расположен, соответственно, в одной из двух прорезей, и регулировочное средство, общее для клиньев пары клиньев, выполненное с возможностью перемещения указанных клиньев пары клиньев в их соответствующих прорезях, при этом регулировочное средство содержит основной управляющий рычаг для совместного перемещения двух клиньев пары клиньев, предпочтительно на одинаковое расстояние.
2. Гибочный пресс по п.1, отличающийся тем, что каждый клин пары клиньев связан с основным управляющим рычагом посредством, по меньшей мере, одной тяги.
3. Гибочный пресс по п.1 или 2, отличающийся тем, что регулировочное средство перемещает клинья пары клиньев в противоположных направлениях.
4. Гибочный пресс по п.3, отличающийся тем, что тяги, которые связывают соответственно два клина пары клиньев с основным управляющим рычагом, присоединены к указанному рычагу с двух сторон от центра поворота указанного рычага.
5. Гибочный пресс по п.1 или 2, отличающийся тем, что регулировочное средство перемещает клинья пары клиньев в одном и том же направлении.
6. Гибочный пресс по п.5, отличающийся тем, что тяги, которые связывают соответственно два клина пары клиньев с основным управляющим рычагом, присоединены к указанному рычагу с одной и той же стороны от центра поворота указанного рычага.
7. Гибочный пресс по п.1, отличающийся тем, что содержит, по меньшей мере, две пары клиньев, причем два клина каждой пары клиньев расположены соответственно в каждой из двух прорезей.
8. Гибочный пресс по п.7, отличающийся тем, что перемещение клиньев двух пар клиньев происходит посредством основного управляющего рычага.
9. Гибочный пресс по п.7, отличающийся тем, что помимо основного управляющего рычага, выполненного с возможностью перемещения клиньев первой пары клиньев, дополнительно содержит вспомогательный управляющий рычаг, выполненный с возможностью перемещения клиньев второй пары клиньев.
10. Гибочный пресс по п.9, отличающийся тем, что вспомогательный управляющий рычаг связан с основным управляющим рычагом таким образом, что обеспечена возможность регулирования положения вспомогательного управляющего рычага относительно основного управляющего рычага, при этом при приводе в действие основного управляющего рычага клинья первой и второй пары клиньев могут перемещаться совместно.
11. Гибочный пресс по любому из пп.7-10, отличающийся тем, что регулировочное средство выполнено с возможностью перемещения первой пары клиньев на первое расстояние и второй пары клиньев на второе расстояние, причем первое и второе расстояния пропорциональны друг другу.
12. Гибочный пресс по п.9, отличающийся тем, что основной управляющий рычаг и вспомогательный управляющий рычаг установлены с возможностью поворота вокруг одного и того же центра поворота.
13. Гибочный пресс по п.1, отличающийся тем, что каждый клин указанной, по меньшей мере, одной пары клиньев образует со вторым неподвижным клином упорный узел.
14. Гибочный пресс по п.13, отличающийся тем, что каждый клин указанной, по меньшей мере, одной пары клиньев имеет первый конец, жестко соединенный с первой кромкой прорези, и второй конец, образующий контактную поверхность клина, с помощью которой клин образует упорный узел.
15. Гибочный пресс по п.1, отличающийся тем, что прорези имеют постоянную высоту, по меньшей мере, в зоне клиньев, так что первые кромки и вторые кромки параллельны при отсутствии усилия гибки на металлическом листе.
16. Гибочный пресс по п.14, отличающийся тем, что контактная поверхность, по меньшей мере, одного из клиньев каждого упорного узла является наклонной, причем уклон составляет от 1% до 40%, предпочтительно от 5% до 10% относительно параллельных кромок прорезей.
17. Гибочный пресс по п.1, отличающийся тем, что имеет вертикальную среднюю плоскость, при этом две прорези расположены симметрично относительно указанной средней плоскости.
18. Гибочный пресс по п.1, отличающийся тем, что две прорези проходят по всей толщине стола.
| Способ изготовления барабанно-дискового ротора турбины | 1983 |
|
SU1112130A1 |
| Пресс для гибки заготовок | 1979 |
|
SU835826A1 |
| Листогибочный пресс | 1989 |
|
SU1697925A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОСНОВАННОЙ НА ТОКЕНАХ ПРИВЯЗКИ ФИЗИЧЕСКИХ ОБЪЕКТОВ В СРЕДЕ РАСПРЕДЕЛЕННОГО РЕЕСТРА | 2020 |
|
RU2809976C2 |

