Изобретение относится к области машиностроения, и может быть использовано в высокоточном технологическом оборудовании, например, при обработке изделий лазерным инструментом.
Известен Z-манипулятор, содержащий стойку с передними и задними вертикальными параллельными гранями, рабочий стол, рабочий орган, привод рабочего органа, включающий размещенные на грани стойки вертикальные направляющие, каретку и размещенный между направляющими привод каретки [1].
Данное техническое решение имеет ограничение на размеры обрабатываемой детали из-за ограниченного расстояния между рабочим органом и обрабатываемой деталью. Для увеличения этого расстояния требуется увеличение габаритов устройства.
Результат, для достижения которого направлено данное техническое решение, заключается в обеспечении возможности обработки крупногабаритных изделий за счет увеличения расстояния между рабочим органом и рабочим столом без увеличения габаритов устройства при одновременном повышении точности позиционирования рабочего органа и обрабатываемого изделия.
Указанный результат достигается за счет того, что Z-манипулятор, содержащий стойку с передними и задними вертикальными параллельными гранями, рабочий стол, рабочий орган, привод рабочего органа, включающий размещенные на грани стойки вертикальные направляющие, каретку и размещенный между направляющими привод каретки, снабжен дополнительным приводом, включающим размещенные на грани стойки вертикальные направляющие, каретку, размещенный между направляющими привод каретки, причем направляющие привода рабочего органа размещены на задней грани стойки, направляющие дополнительного привода - на передней, а каретка дополнительного привода соединена с рабочим столом. Привода кареток смещены от направляющих в сторону продольной оси симметрии стойки и могут быть размещены внутри стойки. Z-манипулятор снабжен Г-образным кронштейном, вертикальная часть которого соединена с кареткой привода рабочего органа, а горизонтальная - соединена с рабочим органом.
Указанный результат достигается также за счет того, что Z-манипулятор может быть снабжен либо размещенным между рабочим органом и кронштейном координатным столом, либо размещенными, соответственно, между рабочим органом и кронштейном и кареткой дополнительного привода и рабочим столом взаимно перпендикулярными линейными осями.
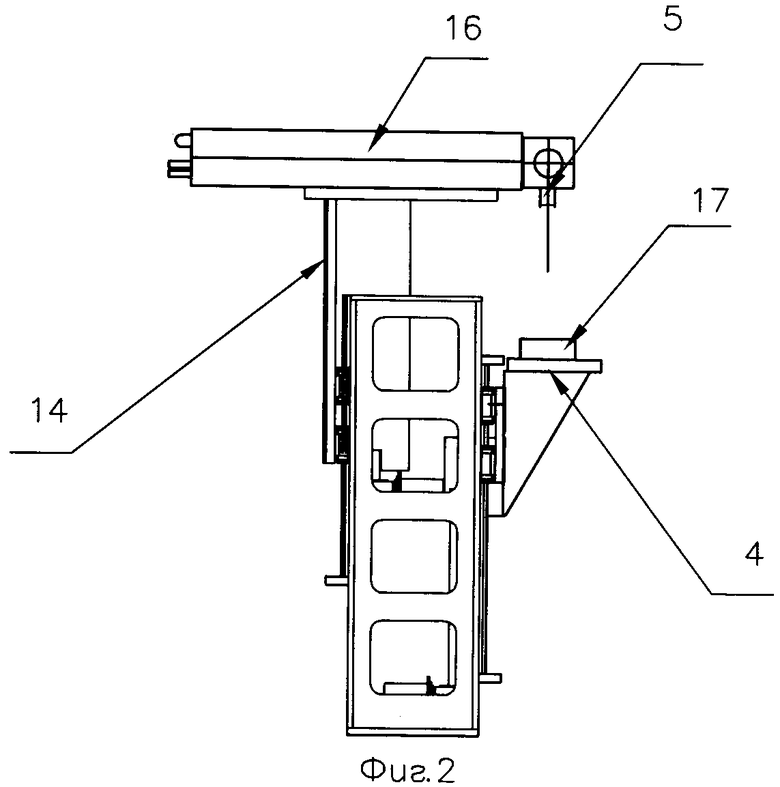
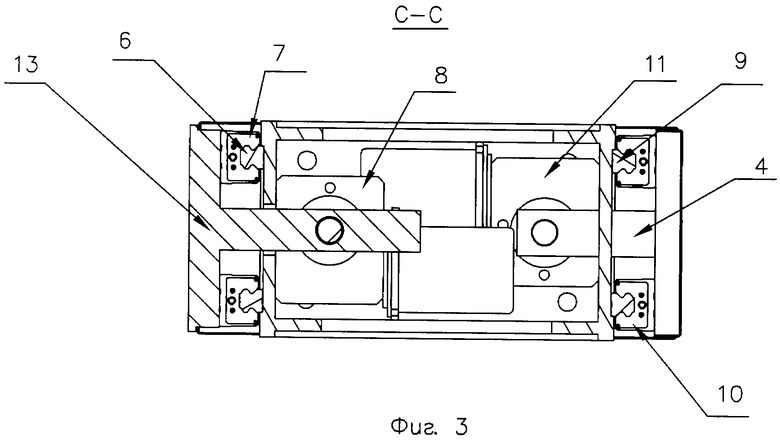
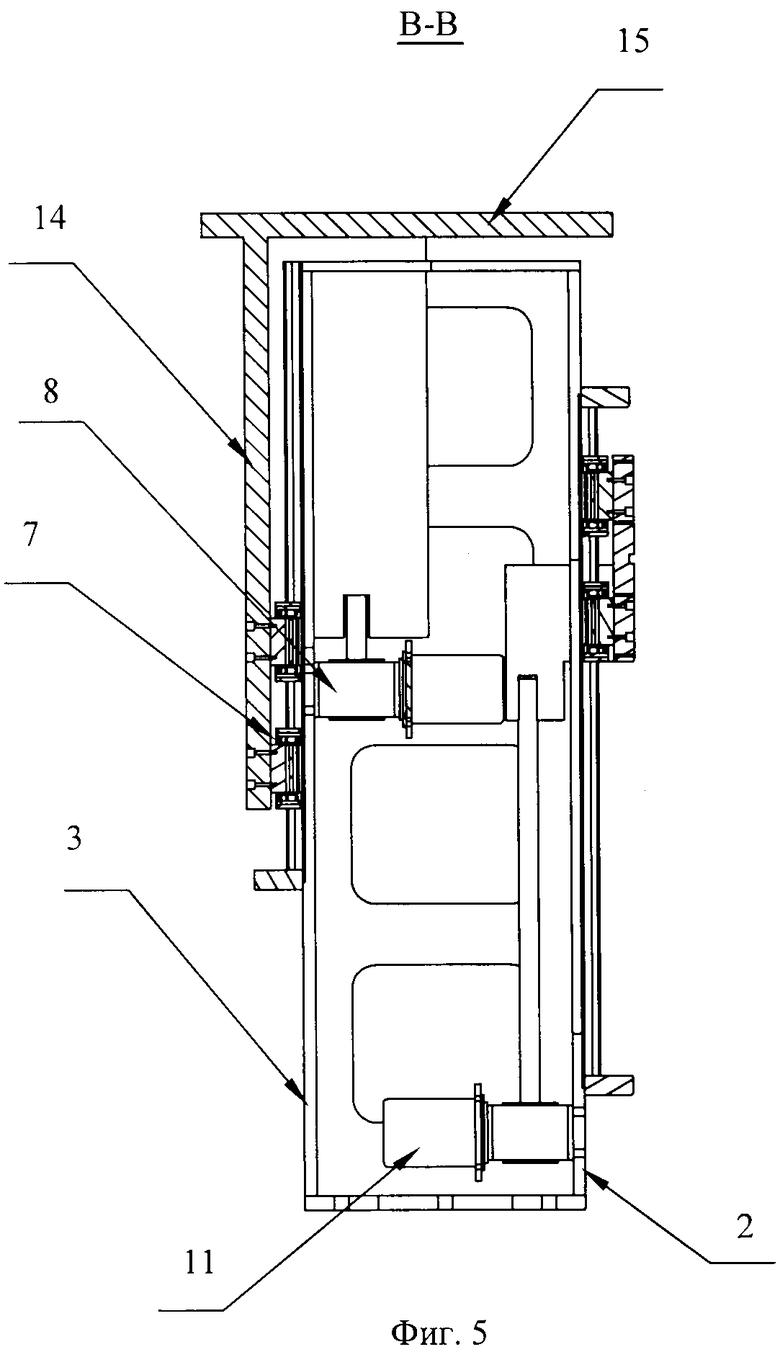
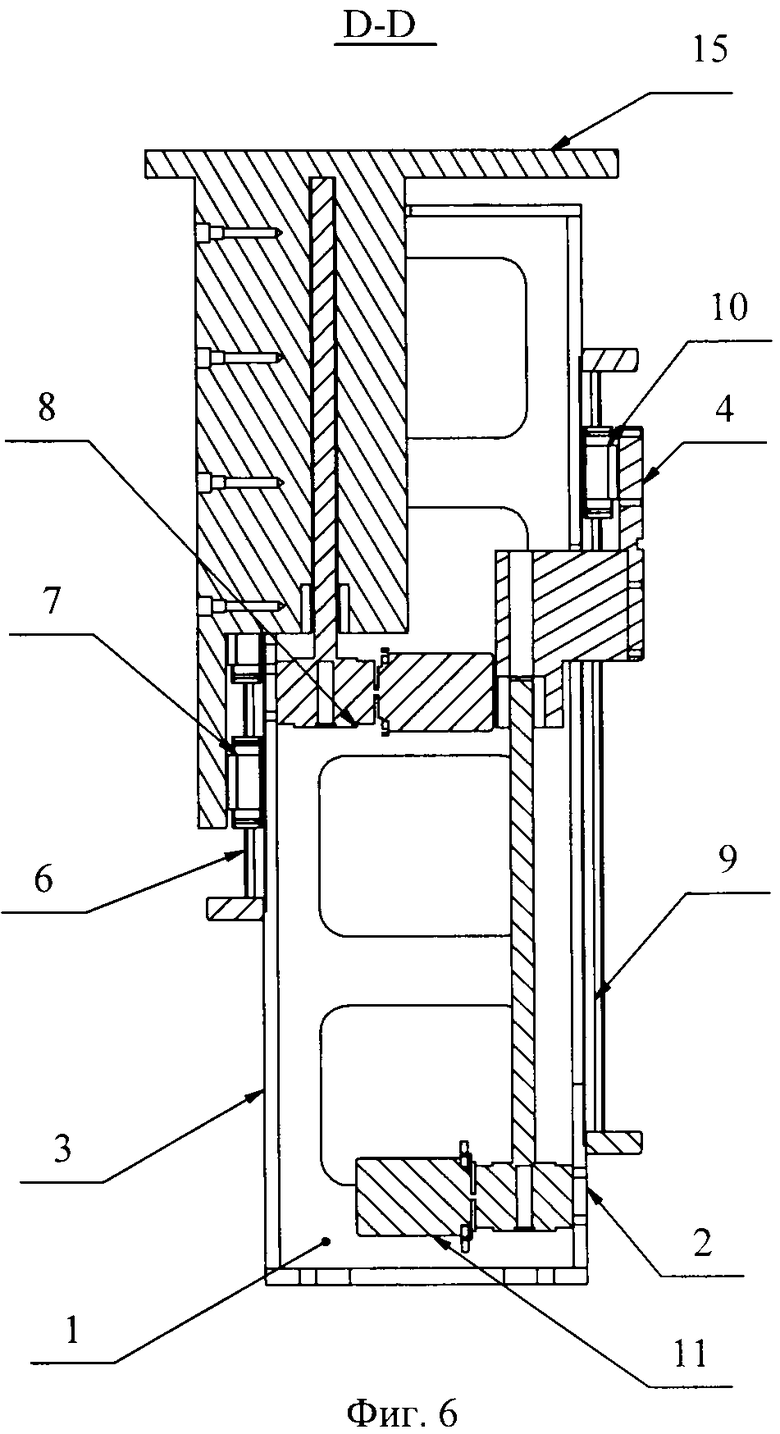
Изобретение поясняется чертежами, где на фиг.1 и 2 изображен пример выполнения заявляемого устройства с опущенным и поднятым кронштейном, на фиг.3 - разрез С-С, на фиг.4 - вид А (без рабочего стола), на фиг.5, 6 - разрез В-В, D-D соответственно.
Z-манипулятор содержит стойку 1 с передними 2 и задними 3 вертикальными параллельными гранями, рабочий стол 4, рабочий орган 5, привод рабочего органа, включающий размещенные на грани стойки вертикальные направляющие 6, каретку 7 и размещенный между направляющими привод 8 каретки, дополнительный привод, включающий размещенные на грани стойки вертикальные направляющие 9, каретку 10, размещенный между направляющими привод каретки 11. Направляющие 6 привода рабочего органа размещены на задней 3 грани стойки, направляющие 9 дополнительного привода размещены на передней 2 грани, а каретка 10 дополнительного привода соединена с рабочим столом 4.
Привода 8, 11 кареток смещены от направляющих в сторону продольной оси симметрии 12 стойки. Привода каретки могут быть размещены внутри стойки 1.
Z-манипулятор снабжен Г-образным кронштейном 13, вертикальная часть 14 которого соединена с кареткой 7 привода рабочего органа, а горизонтальная 15 - соединена с рабочим органом 5. В данном примере выполнения на кронштейне размещен координатный стол 16 для перемещения рабочего органа.
При необходимости, вместо координатного стола, одна линейная ось может быть размещена между рабочим органом и кронштейном, а другая - между кареткой дополнительного привода и рабочим столом, причем эти оси взаимно перпендикулярны между собой (данный вариант на чертежах не показан).
Перед установкой обрабатываемой детали 17 на рабочий стол устанавливают кронштейн и рабочую площадку на необходимую высоту.
За счет того, что направляющие привода рабочего органа размещены на задней грани стойки, а направляющие дополнительного привода - на передней, имеется возможность увеличить расстояние между рабочим органом и обрабатываемой деталью без увеличения габаритов устройства. При этом уменьшается длина направляющих кареток, что ведет к повышению точности позиционирования рабочего органа и детали относительно друг друга.
Так как привода кареток смещены от направляющих в сторону продольной оси симметрии стойки и размещены внутри стойки, снижаются изгибающие нагрузки, действующие на рабочий стол и кронштейн, что также повышает точность позиционирования рабочего органа и детали относительно друг друга.
Таким образом, предложенное техническое решение позволит:
- увеличить расстояние между рабочим органом и рабочим столом для обеспечения возможности обработки крупногабаритных изделий без увеличения габаритов устройства;
- повысить точность позиционирования рабочего органа и обрабатываемого изделия.
Источники информации
1. Проспект фирмы «Sitec Industrietechnologie» LaserWorkStation. LWS, 06.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| 3D-ПРИНТЕР ДЛЯ ПАРАЛЛЕЛЬНОЙ ПЕЧАТИ | 2019 |
|
RU2719528C1 |
| КООРДИНАТНЫЙ СТОЛ | 2009 |
|
RU2417870C2 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| ПЯТИКООРДИНАТНАЯ УСТАНОВКА ДЛЯ ТРЕХМЕРНОЙ ПРЕЦИЗИОННОЙ ГИДРОСТРУЙНОЙ РЕЗКИ | 2010 |
|
RU2453417C2 |
| Многооперационный сборочный центр | 1985 |
|
SU1271717A1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ ПОСРЕДСТВОМ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ С ИСПОЛЬЗОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО ЦЕНТРА | 2010 |
|
RU2446916C1 |

Изобретение относится к области машиностроения и может быть использовано в высокоточном технологическом оборудовании, например, при обработке изделий лазерным инструментом. Z-манипулятор содержит стойку с передними и задними вертикальными параллельными гранями, рабочий стол, рабочий орган, привод рабочего органа, включающий размещенные на грани стойки вертикальные направляющие, каретку и размещенный между направляющими привод каретки. Он также снабжен дополнительным приводом, включающим размещенные на грани стойки вертикальные направляющие, каретку, размещенный между направляющими привод каретки, и Г-образным кронштейном, вертикальная часть которого соединена с кареткой привода рабочего органа, а горизонтальная - с рабочим органом. Причем направляющие привода рабочего органа размещены на задней грани стойки, направляющие дополнительного привода - на передней, а каретка дополнительного привода соединена с рабочим столом. Изобретение позволит обеспечить возможность обработки габаритных изделий за счет увеличения расстояния между рабочим органом и рабочим столом без увеличения габаритов устройства при одновременном повышении точности позиционирования рабочего органа и обрабатываемого изделия. 4 з.п. ф-лы, 6 ил.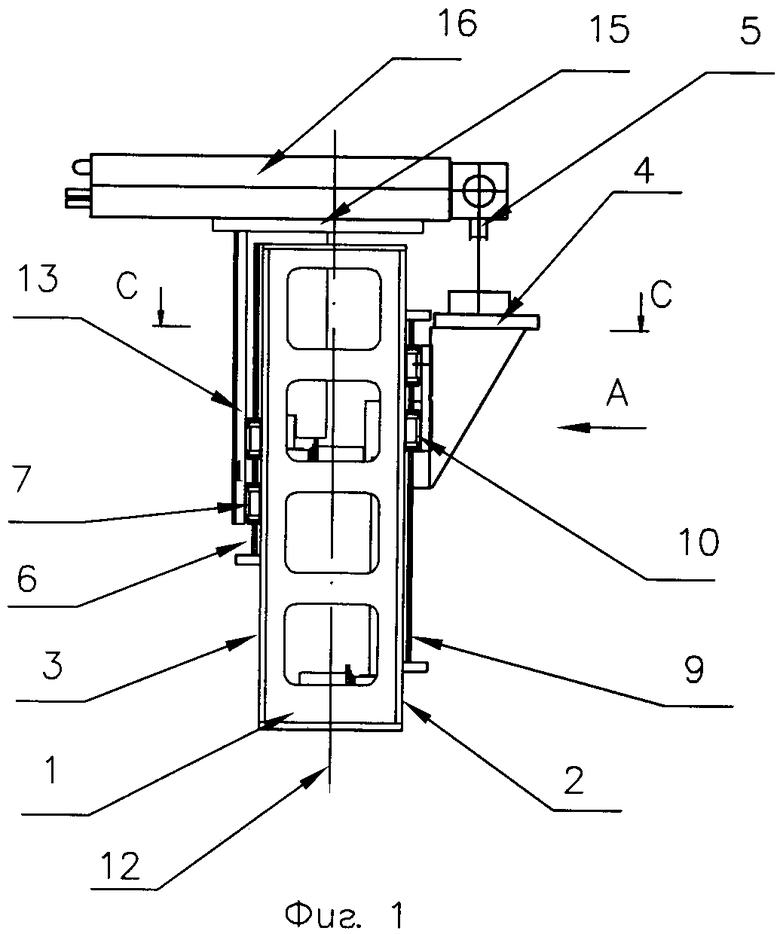
1. Z-манипулятор, содержащий стойку с передними и задними вертикальными параллельными гранями, рабочий стол, рабочий орган, привод рабочего органа, включающий размещенные на грани стойки вертикальные направляющие, каретку и размещенный между направляющими привод каретки, отличающийся тем, что он снабжен дополнительным приводом, включающим размещенные на грани стойки вертикальные направляющие, каретку, размещенный между направляющими привод каретки, и Г-образным кронштейном, вертикальная часть которого соединена с кареткой привода рабочего органа, а горизонтальная - с рабочим органом, причем направляющие привода рабочего органа размещены на задней грани стойки, направляющие дополнительного привода - на передней, а каретка дополнительного привода соединена с рабочим столом.
2. Z-манипулятор по п.1, отличающийся тем, что приводы кареток смещены от направляющих в сторону продольной оси симметрии стойки.
3. Z-манипулятор по п.2, отличающийся тем, что приводы каретки размещены внутри стойки.
4. Z-манипулятор по п.4, отличающийся тем, что он снабжен размещенным между рабочим органом и кронштейном координатным столом.
5. Z-манипулятор по п.4, отличающийся тем, что он снабжен размещенными соответственно между рабочим органом и кронштейном, а также между кареткой дополнительного привода и рабочим столом взаимно перпендикулярными линейными осями.
| "Sitec Industrietechnologie" LaserWorkStation | |||
| LWS, 06, 2007 | |||
| US 4746800 A, 24.05.1988 | |||
| US 7304717 B2, 04.12.2007 | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Манипулятор | 1979 |
|
SU823118A1 |

