Изобретение относится к железнодорожной автоматике и телемеханике и может использоваться для определения параметров движения поезда.
Известно устройство, реализующее способ определения параметров движения поезда, содержащее генератор импульсов, арифметический блок, емкостный датчик перемещений, дифференциальный мост переменного тока, фазовый дискриминатор, счетчик импульсов, канал связи, триггер со счетным входом, элемент И, триггер фиксирования направления движения, ключевые элементы [патент РФ №2049693, МПК B61L 25/06. Способ определения параметров движения поезда. Авторы: Кручинин В.П., Баранов И.А., 1995 г., БИ №34].
Недостатком устройства является отсутствие информации об ординате хвоста поезда, его скорости и ускорении.
Известно устройство для определения местоположения рельсового транспортного средства, содержащее подключенный к рельсам калибровочный шунт, блок измерения временного интервала, блок определения занятости участка, блок памяти, вычислительный блок, информационный блок. [А.с. СССР №1162653 А, МПК B61L 25/02. Устройство для определения местоположения рельсового транспортного средства. Авторы: Бакулин Ю.А., Ерохин Ю.А., 23.06.85 г., БИ №23].
Недостатком устройства является отсутствие информации об ординате хвоста поезда, его скорости и ускорении.
Техническим результатом является повышение точности определения параметров движения и расширение функциональных возможностей за счет возможности определения параметров движения поезда (ординаты, скорости и ускорения).
Указанный технический результат достигается тем, что в устройство определения параметров движения поезда, содержащее рельсовую линию, состоящую из рельсовых нитей, вычислительный блок, генератор импульсов, информационный блок и блок памяти, дополнительно введены токовый датчик, согласующее регулируемое комплексное сопротивление, блок регулирования, причем положительный вывод генератора экспоненциальных импульсов через согласующее регулируемое комплексное сопротивление подключен к одной рельсовой нити, а отрицательный вывод генератора экспоненциальных импульсов подключен к другой рельсовой нити через токовый датчик, выход которого подключен к первому входу вычислительного блока, второй вход которого подключен к выходу информационного блока, а первый выход - к входу устройства регулирования, первый выход которого подключен к согласующему регулируемому комплексному сопротивлению, а второй выход - к входу генератора экспоненциальных импульсов, второй выход вычислительного блока подключен к входу блока памяти, выход которого подключен к входу информационного блока.
Введение токового датчика, согласующего регулируемого комплексного сопротивления, блока регулирования позволит непрерывно измерять длительность "затяжки" заднего фронта каждого импульса (длительность заднего фронта импульса), которая появляется из-за индуктивного характера сопротивления рельсовой линии. Длительность "затяжки" заднего фронта импульса зависит от величины индуктивности, распределенной вдоль рельсовой линии, то есть от расстояния до головы или хвоста поезда от точки подключения генератора. Это позволяет более точно определять ординату головы или хвоста поезда. По разности ординат, определенных для каждого из двух следующих друг за другом импульсов, при известном периоде следования этих импульсов определяется скорость и ускорение поезда, что расширяет функциональные возможности устройства.
На фиг.1 приведена блок-схема устройства определения параметров движения поезда. Устройство содержит: генератор импульсов 1, например экспоненциальных импульсов, согласующее регулируемое комплексное сопротивление Zcoг. 2, которое автоматически настраивается равным волновому сопротивлению рельсовой линии, токовый датчик 3, рельсовую линию с зоной контроля, состоящую из рельсовых нитей 4 и 5, устройство регулирования 6, вычислительный блок 7, информационный блок 8, блок памяти 9.
Положительный вывод (+) генератора экспоненциальных импульсов 1 через согласующее регулируемое комплексное сопротивление Zcoг. 2 подключен к рельсовой нити 4, а отрицательный вывод (-) генератора экспоненциальных импульсов 1 подключен к рельсовой нити 5 через токовый датчик 3, выход которого подключен на первый вход вычислительного блока 7, второй вход которого подключен к выходу информационного блока 8, а первый выход - к входу устройства регулирования 6, первый выход которого подключен к согласующему регулируемому комплексному сопротивлению Zcoг. 2, а второй выход - к входу генератора экспоненциальных импульсов 1, второй выход вычислительного блока 7 подключен к входу блока памяти 9, выход которого подключен к входу информационного блока 8.
Устройство работает следующим образом.
На выходе генератора экспоненциальных импульсов 1, работающего в режиме энергосбережения (низкая частота генерации импульсов), формируются экспоненциальные импульсы, которые через Zcoг. 2 подаются в рельсовую линию на рельсовые нити 4 и 5 и распространяются в обе стороны от места подключения. Zcoг. 2 обеспечивает равенство выходного сопротивления генератора экспоненциальных импульсов 1 и волнового сопротивления рельсовой линии с соблюдением условия передачи максимума энергии в импульсе. Через токовый датчик 3 из-за наличия утечек между рельсовыми нитями 4 и 5 протекает импульсный ток. Причем в связи с индуктивным характером сопротивления рельсовой линии происходит "затяжка" заднего фронта каждого импульса. На выходе токового датчика 3 формируется напряжение такого же вида. Длительность "затяжки" каждого импульса измеряет вычислительный блок 7 и сравнивает с длительностью "затяжки" предыдущего импульса.
При отсутствии на рельсовой линии поезда длительность "затяжки" заднего фронта сохраняется неизменной. Вычислительный блок 7 фиксирует это и, воздействуя на генератор экспоненциальных импульсов 1 через устройство регулирования 6, сохраняет его работу в режиме энергосбережения.
Вступление поезда на рельсовую линию (рельсовые нити 4 и 5) в зоне контроля приведет к уменьшению "затяжки" очередного импульса. Вычислительный блок 7, зафиксировав это уменьшение, переводит генератор экспоненциальных импульсов 1 в режим увеличения частоты генерации импульсов, что обеспечивает более высокую точность измерения параметров движения поезда.
По мере дальнейшего движения поезда происходит постепенное уменьшение индуктивности рельсовой линии между поездным шунтом и генератором экспоненциальных импульсов 1, что приводит к уменьшению длительности «затяжки» заднего фронта импульса. Вычислительный блок 7, измеряя "затяжку" заднего фронта напряжения на выходе токового датчика 3 для каждого импульса, производит расчет ординаты головы поезда хi, xi+1, хi+2,… в каждый момент времени.
Вычислительный блок 7 вычисляет скорость поезда в реальном масштабе времени в моменты определения каждой новой ординаты головы поезда с учетом того, что расстояние между соседними ординатами поезд проходит за время Т (Т - периодичность следования импульсов от генератора экспоненциальных импульсов 1):
 - скорость на отрезке между ординатами хi и хi+1;
- скорость на отрезке между ординатами хi и хi+1;
 - скорость на отрезке между ординатами xi+1 и хi+2.
- скорость на отрезке между ординатами xi+1 и хi+2.
Вычислительный блок 7 вычисляет ускорение поезда в реальном масштабе времени по изменению скорости на двух соседних отрезках:

Если токовый датчик 3 формирует на своем выходе импульс напряжения с отсутствием "затяжки" заднего фронта, то вычислительный блок 7 делает вывод, что индуктивность равна нулю и поезд находится на ординате подключения генератора экспоненциальных импульсов 1 к рельсовой линии.
Так как экспоненциальный импульс распространяется по рельсовой линии в обе стороны от точки подключения генератора экспоненциальных импульсов 1, то при удалении поезда от генератора экспоненциальных импульсов 1 контроль ординаты хвоста поезда, а также определение скорости поезда и его ускорения осуществляется аналогично описанному выше.
Информация об ординате головы и хвоста поезда, его скорости и ускорении со второго выхода вычислительного блока 7 непрерывно записывается в блок памяти 9 и с его выхода передается на вход информационного блока 8 для передачи этих данных в соответствующую систему автоматики и/или для ее отображения при необходимости причастным работникам.
Текущее значение сопротивления балласта рельсовой линии (рельсовые нити 4 и 5) с выхода информационного блока 8 подается на второй вход вычислительного блока 7. В соответствии с этим вычислительный блок 7 рассчитывает величину волнового сопротивления рельсовой линии и формирует команду, которая с первого выхода вычислительного блока 7 подается на вход устройства регулирования 6, которое с первого выхода производит соответствующую настройку активной и реактивной составляющих сопротивления Zcoг. 2.
Предлагаемое устройство позволяет повысить точность определения параметров движения, расширяет функциональные возможности устройства и может быть использовано, например, в системах интервального регулирования движения поездов, для организации участков приближения к переезду с контролем скорости и ускорения поезда, для контроля заполнения подгорочных путей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 2010 |
|
RU2463188C2 |
| УСТРОЙСТВО КОРРЕКТИРОВКИ ЛИНЕЙНОЙ КООРДИНАТЫ НАХОЖДЕНИЯ ПОЕЗДА | 2005 |
|
RU2290335C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| РЕЛЬСОВАЯ ЦЕПЬ | 1992 |
|
RU2089426C1 |
| Устройство для позиционирования рельсового транспорта | 2021 |
|
RU2768805C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСА | 2010 |
|
RU2424936C1 |
| Устройство для интервального регулирования движения поездов на перегоне | 1980 |
|
SU901130A1 |
| Рельсовая цепь | 1987 |
|
SU1525063A1 |
| Система интервального регулирования движения поездов с контролем изменения алгоритма работы | 2021 |
|
RU2775907C1 |
Изобретение относится к железнодорожной автоматике и телемеханике и может использоваться для определения параметров движения поезда. Устройство содержит рельсовые нити, вычислительный блок, генератор импульсов, информационный блок и блок памяти. В устройство дополнительно введены токовый датчик, согласующее регулируемое комплексное сопротивление, блок регулирования. Причем положительный вывод генератора экспоненциальных импульсов через согласующее регулируемое комплексное сопротивление подключен к одной рельсовой нити, а отрицательный вывод генератора экспоненциальных импульсов подключен к другой рельсовой нити через токовый датчик. Выход токового датчика подключен к первому входу вычислительного блока, второй вход которого подключен к выходу информационного блока, а первый выход - к входу устройства регулирования, первый выход которого подключен к согласующему регулируемому комплексному сопротивлению, а второй выход - к входу генератора экспоненциальных импульсов. Второй выход вычислительного блока подключен к входу блока памяти, выход которого подключен к входу информационного блока. Достигается повышение точности определения параметров движения и расширение функциональных возможностей. 1 ил.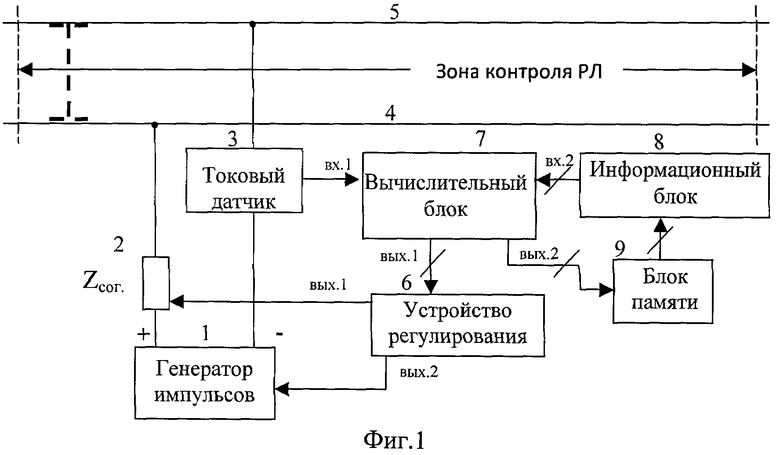
Устройство определения параметров движения поезда, содержащее рельсовую линию, состоящую из рельсовых нитей, вычислительный блок, генератор импульсов, информационный блок и блок памяти, отличающееся тем, что в него дополнительно введены токовый датчик, согласующее регулируемое комплексное сопротивление, блок регулирования, а в качестве генератора импульсов используют генератор экспоненциальных импульсов, положительный вывод которого через согласующее регулируемое комплексное сопротивление подключен к одной рельсовой нити, а отрицательный вывод подключен к другой рельсовой нити через токовый датчик, выход которого подключен к первому входу вычислительного блока, второй вход которого подключен к выходу информационного блока, а первый выход - к входу устройства регулирования, первый выход которого подключен к согласующему регулируемому комплексному сопротивлению, а второй выход - к входу генератора экспоненциальных импульсов, второй выход вычислительного блока подключен к входу блока памяти, выход которого подключен к входу информационного блока.
| Устройство для определения местоположения рельсового транспортного средства | 1983 |
|
SU1162653A1 |
| Устройство для определения параметров движения рельсовых транспортных средств | 1991 |
|
SU1791255A1 |
| Устройство для измерения параметров движения рельсовых подвижных единиц | 1982 |
|
SU1060527A1 |
| ГИДРОМЕХАНИЧЕСКОЕ ПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ КОЛЕСНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2090491C1 |
| Устройство для измерения параметров движения рельсовых подвижных единиц | 1975 |
|
SU662401A1 |

