Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству отображения и к машиночитаемому носителю.
Уровень техники
Обычно устройство отображения для отображения построенных точек или приближенных графиков способно разделять область отображения на две области, чтобы построенные точки/приближенные графики в разных системах координат, например в системе координат XY и XZ системе координат, могли, соответственно, отображаться в каждой области (см., например, публикацию заявки на патент Японии 2003-281102). Согласно такому устройству отображения, это позволяет анализировать распределение построенных точек трехмерного пространства одновременно в совокупности координатных плоскостей и, таким образом, увеличивать обучающий эффект пользователя.
Однако устройство отображения вышеупомянутого патентного документа не позволяет коррелировать распределение построенных точек в трехмерном пространстве и события в реальной жизни, и, таким образом, обучающий эффект пользователя оказывается низким.
Раскрытие изобретения
Задачи настоящего изобретения включают в себя обеспечение устройства отображения и машиночитаемого носителя, которые могут обеспечивать более высокий обучающий эффект, чем обычные.
Согласно первому аспекту настоящего изобретения, предусмотрено устройство отображения, включающее в себя:
блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси;
память, где хранятся по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении; и
процессор, который осуществляет:
обработку указания файлов изображения, которая указывает любой из файлов изображения, хранящихся в памяти, как указанный файл изображения на основании пользовательской операции;
обработку отображения, которая (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве данных указанной таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения, в первой области отображения блока отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат, в первой области отображения, и (iv) управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и
обработка отображения устанавливает вторую систему координат во второй области отображения на основании данных указанной таблицы значений координат и управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции второй системы координат.
Согласно второму аспекту настоящего изобретения предусмотрен машиночитаемый носитель, где хранится программа, включающая в себя последовательность инструкций, побуждающих компьютер выполнять обработку, причем компьютер включает в себя: блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси; и память, где хранятся по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении, и обработка включает в себя:
инструкцию указания файлов изображения, которая указывает любой из файлов изображения, хранящихся в памяти, как указанный файл изображения на основании пользовательской операции;
инструкцию отображения, которая (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве данных указанной таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения, в первой области отображения блока отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат, в первой области отображения, и (iv) управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и
инструкция отображения устанавливает вторую систему координат во второй области отображения на основании данных указанной таблицы значений координат, и управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции второй системы координат.
Согласно третьему аспекту настоящего изобретения предусмотрено устройство отображения, включающее в себя:
блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси;
блок хранения файлов изображения, где хранятся по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении;
блок указания файлов изображения, который указывает любой из файлов изображения, хранящихся в блоке хранения файлов изображения, как указанный файл изображения на основании пользовательской операции;
блок управления отображением, который (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве данных указанной таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения, в первой области отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат, в первой области отображения, и (iv) управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и
блок управления отображением устанавливает вторую систему координат во второй области отображения на основании данных указанной таблицы значений координат и управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции второй системы координат.
Краткое описание чертежей
Фиг. 1 - плоский вид, демонстрирующий схематическую конфигурацию альфа-калькулятора.
Фиг. 2 - блок-схема, демонстрирующая функциональную конфигурацию альфа-калькулятора.
Фиг. 3 - вид, демонстрирующий конфигурацию данных файла изображения.
Фиг. 4A и 4B - виды, демонстрирующие изображение данных изображения.
Фиг. 5 - логическая блок-схема, демонстрирующая последовательность действий обработки отображения информации.
Фиг. 6 - логическая блок-схема, демонстрирующая последовательность действий обработки режима построения множественных изображений.
Фиг. 7 - логическая блок-схема, демонстрирующая последовательность действий обработки режима построения единичного изображения.
Фиг. 8 - логическая блок-схема, демонстрирующая последовательность действий обработки разделения.
Фиг. 9 - логическая блок-схема, демонстрирующая последовательность действий обработки задания левого экрана.
Фиг. 10A и 10B - виды, демонстрирующие содержимое отображения на дисплее.
Фиг. 11A-11D - виды, демонстрирующие содержимое отображения на дисплее.
Фиг. 12A-12D - виды, демонстрирующие содержимое отображения на дисплее.
Фиг. 13A и 13B - виды, демонстрирующие содержимое отображения на дисплее.
Фиг. 14A и 14B - виды, демонстрирующие содержимое отображения на дисплее.
Осуществление изобретения
Пример варианта осуществления настоящего изобретения будет подробно описан ниже со ссылкой на сопровождающие чертежи. Однако объем изобретения не ограничивается представленным примером.
1.1 Внешний вид
На фиг. 1 показан плоский вид, демонстрирующий схематическую конфигурацию альфа-калькулятора 1, снабженного электрическим устройством согласно настоящему изобретению.
Согласно чертежу, альфа-калькулятор 1 включает в себя группу 2 клавиш ввода, имеющую различные типы клавиш, и дисплей 3.
Группа 2 клавиш ввода - это группа клавиш для приема операции ввода композиционного элемента математической формулы, например численного значения или символа вычисления, или для приема операционных инструкций различных типов обработки со стороны пользователя, и включает в себя совокупность клавиш, каждой из которых приписана уникальная функция. Уникальная функция назначается каждой из клавиш. В настоящем варианте осуществления группа 2 клавиш ввода включает в себя числовую кнопочную панель 20, клавишу 21 вычислительного символа, клавишу 22 курсора, клавишу EXE 23, клавишу удаления 24, и пр.
Среди них числовая кнопочная панель 20 предназначена для приема операции ввода численного значения, и клавиша 21 вычислительного символа предназначена для приема операции ввода различных вычислительных символов, например символов четырех арифметических операций, скобок, черты дроби, знака корня (√), символа логарифма, постоянной (круговой постоянной “π”, скорости света “c”, и пр.), и символа тригонометрической функции.
Клавиша курсора 22 - это клавиша, которую нажимают, когда курсор, указывающий позицию цели редактирования или позицию цели выбора, перемещается по дисплею 3 в заранее определенном направлении и т.п. Клавиша курсора 22 приспособлена для операций ввода в четырех направлениях, вверх, вниз, вправо и влево согласно настоящему варианту осуществления.
Клавиша EXE 23 - это клавиша для приема операции ввода инструкции выполнения обработки или инструкции принятия решения, которая приспособлена функционировать как клавиша инструкции для выполнения, например, вычислительной обработки после ввода формулы. Клавиша удаления 24 - это клавиша для приема операции удаления численного значения или вычислительного символа, отображаемого на дисплее 3.
Дисплей 3 включает в себя жидкокристаллический дисплей (ЖКД), электролюминесцентный дисплей (ЭЛД) и т.п. и отображает различные типы данных, которые необходимы при использовании альфа-калькулятора 1, помимо символа, кода, формулы и результата вычисления, в соответствии с операцией группы 2 клавиш ввода и т.п. При этом, дисплей 3 согласно настоящему варианту осуществления может отображать совокупность слоев в режиме наложения. Кроме того, дисплей 3 имеет левостороннюю область отображения 3A в левой стороне и правостороннюю область отображения 3B в правой стороне экрана дисплея, который делится пополам, что позволяет переключать экран дисплея между состоянием разделенного отображения, когда экран дисплея делится на левостороннюю область отображения 3A и правостороннюю область отображения 3B, как показано на описанной ниже фиг. 11B и т.п., и состоянием полноэкранного отображения, когда отображение выполняется без разделения экрана дисплея. Кроме того, дисплей 3 может задавать ортогональную систему координат XY для отображения в левосторонней области отображения 3A и ортогональную систему координат TX или ортогональную систему координат TY для отображения в правосторонней области отображения 3B, при отображении в состоянии разделенного отображения. Кроме того, в порядке объединения, на всем экране дисплея 3 предусмотрен сенсорный экран 30.
1.2 Функциональная конфигурация
Теперь опишем функциональную конфигурацию альфа-калькулятора 1.
На фиг. 2 показана блок-схема, демонстрирующая функциональную конфигурацию альфа-калькулятора 1.
Согласно чертежу, альфа-калькулятор 1 включает в себя клавишный блок ввода 14, блок отображения 15, интерфейс 16, оперативную память (ОЗУ) 12, запоминающее устройство 13 и центральный процессор (ЦП) 11.
Клавишный блок ввода 14 имеет вышеупомянутую группу 2 клавиш ввода и выводит сигнал операции, который соответствует нажатой клавише, на ЦП 11.
Блок отображения 15 имеет вышеупомянутый дисплей 3 и отображает различные фрагменты информации на дисплее 3 согласно сигналу отображения от ЦП 11. Кроме того, блок отображения 15 имеет сенсорный экран 30, обеспеченный совместно с дисплеем 3 для вывода информации позиции касания пера ввода на экране дисплея на ЦП 11.
Интерфейс 16 представляет собой соединительный терминал для подключения устройства отображения к внешнему устройству (не показано). В настоящем варианте осуществления, интерфейс 16 может считывать описанный ниже файл 132 изображения и т.п. с внешнего устройства по кабелю USB и т.п., благодаря чему информацию можно сохранять в запоминающем устройстве 13. При этом, интерфейс 16 может считывать данные с носителя записи, например карты памяти.
ОЗУ 12 - это энергозависимая память для временного хранения информации, которая имеет совокупность рабочих областей для хранения различных типов программ, подлежащих выполнению, данных, относящихся к различным типам программ, и т.п.
Запоминающее устройство 13 - это энергонезависимая память, включающая в себя постоянную память (ПЗУ) и т.п., где хранятся различные программы и различные данные. В частности, в запоминающем устройстве 13 хранятся программа 130 отображения информации в качестве программы согласно настоящему изобретению и группа 131 файлов изображения.
Программа 130 отображения информации - это программа, предписывающая ЦП 11 выполнять описанную ниже обработку отображения информации (см. фиг. 5).
Группа 131 файлов изображения включает в себя совокупность файлов 132 изображения и, в частности, включает в себя по меньшей мере один файл 132 изображения, имеющий совокупность фрагментов данных 133 изображения (ниже именуемый файлом 132A множественных изображений) и по меньшей мере один файл 132 изображения, имеющий только один фрагмент данных 133 изображения (ниже именуемый файлом 132B единичного изображения) соответственно, как показано на фиг. 3. Каждый из файлов 132 изображения имеет данные 133 изображения, данные 134 установки режима отображения и данные 135 таблицы значений координат, которые коррелируют друг с другом. При этом для упрощения чертежа изображение данных 133 изображения не показано на фиг. 3.
Данные 133 изображения - это данные, относящиеся к изображению, которое может отображаться в режиме перекрывания в системе координат и где показана заранее определенная форма, которую можно аппроксимировать графиком (например, параболой, прямой, окружностью, многоугольником и т.п.). В частности, изображение данных 133 изображения в файле 132B единичного изображения представляет собой изображение, полученное составлением последовательной радиографии движущегося объекта, например мяча, или изображение, полученное взятием группы объектов, которые совершают одно и то же движение, например гондолы чертова колеса, как показано, например, на фиг. 4A или фиг. 4B, где в каждом изображении заранее определенная форма изображена посредством массы позиций объектов (целевых точек анализа). С другой стороны, изображение данных 133 изображения файла 132A множественных изображений включает в себя, например, совокупность изображений, сделанных посредством последовательной радиографии движущегося объекта, и масса позиций объектов (точек объекта анализа) в каждом изображении демонстрирует заранее определенную форму. Однако изображение, отличающееся от фактического события, например нарисованное изображение, можно использовать в качестве данных 133 изображения. Кроме того, заранее определенная форма, которую можно аппроксимировать графиком, не ограничивается параболой, прямой, окружностью и многоугольником и может принимать другие формы.
Кроме того, данные 134 установки режима отображения - это данные, указывающие режим отображения дисплея 3, которые указывают режим отображения для каждого режима, в котором может отображаться изображение, в частности, указывает каждый из режима графического рисунка, графического режима и геометрического режима. Здесь, режим графического рисунка - это режим, в котором построенные точки отображаются путем наложения на изображение. В графическом режиме, график отображается путем наложения на единичное изображение. В геометрическом режиме, фигура, начерченная пользователем, отображается путем наложения на изображение.
Кроме того, в качестве информации, относящейся к режиму отображения изображения в режиме графического рисунка и графическом режиме, данные 134 установки режима отображения включают в себя: данные, указывающие диапазон системы координат XY (верхнее предельное значение и нижнее предельное значение по оси XY), которая задана на полном изображении данных 133 изображения в режиме перекрывания (ниже именуемом полным изображением, соответствующим данным 138 диапазона координат); данные, указывающие диапазон системы координат XY, которая задается в режиме перекрывания части изображения цели отображения в случае, когда изображение уменьшается или обрезается для отображения в левосторонней области отображения 3A дисплея 3 (ниже именуемого уменьшенным изображением, соответствующим данным 139 диапазона координат); и данные, указывающие интервал шкалы каждой координатной оси. Однако уменьшенное изображение, соответствующее данным 139 диапазона координат, может не быть включено в данные 134 установки режима отображения.
Кроме того, в качестве информации, относящейся к режиму отображения в режиме графического рисунка и в графическом режиме, данные 134 установки режима отображения включают в себя: информацию установки, относящуюся к цвету или форме построенной точки P (см. фиг. 11A-11D), отображаемой при осуществлении описанной ниже обработки отображения информации (см. фиг. 5), отличную от информации установки, указывающей, отображается ли координатная ось (см. статью на тему “ось”), отображается ли шкала (см. статью на тему “шкала”), отображается ли обозначение координаты (имя координатной оси для оси XY и начало координат “0”) (см. статью на тему “обозначение”) и пр.
Кроме того, данные 135 таблицы значений координат указывают значения координат каждой из построенных точек P в системах координат XYT. При этом, в настоящем варианте осуществления, данные 135 таблицы значений координат заранее включают в себя по меньшей мере значение координаты, относящееся к оси T (оси времени). Значение координаты, относящееся к оси T, может быть задано пользователем или может быть задано заранее, при создании файла 132 изображения внешним устройством. С другой стороны, значение координаты оси XY может быть заранее включено в данные 135 таблицы значений координат или может быть вновь включено описанной ниже обработкой режима построения единичного изображения (см. фиг. 7) или обработкой режима построения множественных изображений (см. фиг. 6). Значения координат XY каждой построенной точки P указывает значения координат в системе координат XY, относящиеся к целевой точке анализа, которая заранее задана пользователем в изображении данных 133 изображения (например, мяч на фиг. 4A, гондола на фиг. 4B и т.п.).
При этом, данные 135 таблицы значений координат в файле 132A множественных изображений коррелируют одно значение координаты с каждым фрагментом данных 133 изображения, благодаря чему количество полей данных в данных 135 таблицы значений координат, т.е. количество значений координат, которые могут храниться, равно количеству фрагментов данных 133 изображения в файле 132 изображения. С другой стороны, данные 135 таблицы значений координат в файле 132B единичного изображения коррелируют совокупность значений координат с одним фрагментом данных 133 изображения, благодаря чему количество полей данных в данных 135 таблицы значений координат равно количеству, ранее установленному пользователем или установленному при создании файла (например, номеру композиции в составном файле). При этом, каждое значение координаты, относящееся к оси T, указывает время, прошедшее с начала отсчета времени, которое устанавливается при взятии каждого фрагмента данных 133 изображения, в файле 132A множественных изображений. Кроме того, в файле 132B единичного изображения, значение координаты указывает время, прошедшее с начала отсчета времени в случае взятия любой целевой точки анализа в данных 133 изображения устанавливается как начало отсчета времени. Таким образом, в файле 132A множественных изображений, имеющем имя файла, например “basketball2.g3p”, каждый фрагмент данных 133 изображения является непрерывно делаемой фотографией, и значение оси T в данных 135 таблицы значений координат является записью времени, истекшего после фотографирования каждого изображения. Кроме того, в файле 132B единичного изображения, имеющем имя файла “basketball.g3p”, один фрагмент данных 133 изображения является, например, составным изображением, составляющим траекторию переменных точек непрерывно делаемых фотографий, и значение оси T в данных 135 таблицы значений координат является записью времени, истекшего после фотографирования каждой переменной точки.
ЦП 11 централизованно управляет каждым блоком альфа-калькулятора 1. В частности, ЦП 11 расширяет системную программу, хранящуюся в запоминающем устройстве 13, и программу, указанную среди различных прикладных программ в ОЗУ 12, для выполнения различных типов обработки совместно с программой, расширенной в ОЗУ 12.
1.3 Порядок работы альфа-калькулятора
Ниже описан порядок работы альфа-калькулятора 1.
На фиг. 5 показана логическая блок-схема, поясняющая операцию обработки отображения информации. При этом обработка отображения информации выполняется посредством следующей процедуры: когда инструкция выполнения обработки отображения информации вводится пользователем посредством сенсорного экрана 30 или клавишного блока ввода 14, программа 130 отображения информации считывается из запоминающего устройства 13 и расширяется в ОЗУ 12, и, в результате, обработка отображения информации выполняется путем кооперации программы отображения информации 130 и ЦП 11.
Согласно чертежу, при обработке отображения информации, ЦП 11 сначала побуждает дисплей 3 отображать экран меню выбора в различных режимах (Этап S1), после чего принимается решение, выполняется ли операция выбора режима графического рисунка (Этап S2), и, если принято решение, что операция выбора не выполняется (Этап S2; Нет), обработка переходит к другой обработке.
Кроме того, в случае, когда на этапе S2 принимается решение, что операция выбора режима графического рисунка выполняется (Этап S2; Да), ЦП 11 побуждает экран указания выбора файла 132 изображения для отображения на дисплее 3 позволить пользователю указать любой из файлов 132 изображения из группы 131 файлов изображения (Этап S3). При этом, на этапе S3 согласно настоящему варианту осуществления пользователь указывает файл 132 изображения посредством группы 2 клавиш ввода. Однако указание можно производить посредством сенсорного экрана 30.
Затем ЦП 11 считывает данные 133 изображения, полное изображение, соответствующее данным 138 диапазона координат, и данные 135 таблицы значений координат в файле 132 изображения, указанном на этапе S3 (ниже именуемом указанным файлом 132S изображения), в качестве данных 133S указанного изображения, указанное полное изображение, соответствующее данным 138S диапазона координат, и данные 135S указанной таблицы значений координат и, в то же время, побуждает дисплей 3 находиться в состоянии полноэкранного отображения, чтобы изображение данных 133S указанного изображения отображалось в полноэкранном режиме на заднем слое дисплея 3 (Этап S4). При этом, в случае, когда указанный файл 132S изображения является файлом 132A множественных изображений, ЦП 11 указывает первый или последний фрагмент данных 133 изображения в качестве данных 133S указанного изображения на этапе S4.
Затем ЦП 11 определяет, включена ли информация значения координаты XY в данные 135S указанной таблицы значений координат (Этап S5). Если принято решение, что информация включена (Этап S5; Да), система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается на переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой из позиций, указанных данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY (Этап S50). Затем обработка переходит к описанному ниже этапу S11.
Кроме того, если на этапе S5 принято решение, что информация значения координаты XY не включена (Этап S5; Нет), то ЦП 11 определяет тип указанного файла 132S изображения (Этап S7). При этом, на этапе S7, ЦП 11 определяет, является ли указанный файл 132S изображения файлом 132A множественных изображений или файлом 132B единичного изображения.
Если на этапе S7 принято решение, что указанный файл 132S изображения является файлом 132A множественных изображений (Этап S7; Множественные), то ЦП 11 выполняет обработку режима построения множественных изображений (Этап S8).
В частности, согласно фиг. 6, при обработке режима построения множественных изображений, ЦП 11 сначала устанавливает ось XY в переднем слое экрана дисплея 3 и систему координат XY, определяемую установленной координатной осью, как показано на фиг. 6 (Этап T1), на основании данных 134 установки режима отображения в указанном файле 132S изображения. В частности, ЦП 11 считывает диапазон задания системы координат XY из указанного полного изображения, соответствующего данным 138S диапазона координат данных 134 установки режима отображения, и устанавливает систему координат XY в диапазоне задания в области отображения изображения в переднем слое. При этом, в случае, когда информация установки для отображения координатной оси включена в данные 134 установки режима отображения, ЦП 11 предписывает отображение оси XY в переднем слое.
Затем ЦП 11 устанавливает “1” в качестве значения переменной “n” (Этап T2), и предписывает отображение изображения “n”-х данных 133 изображения указанного файла 132S изображения на дисплее 3 в качестве заднего слоя системы координат XY (Этап T3). При этом, в случае, когда построенные точки P отображаются на переднем слое на описанном ниже этапе T5, ЦП 11 предписывает отображение каждой построенной точки P и поддерживает состояние, предписывая отображение изображения в качестве заднего слоя на этапе T3.
Затем ЦП 11 позволяет пользователю выполнять операцию построения в отношении нужной целевой точки анализа в изображении в состоянии, когда изображение данных 133 изображения отображается на экране дисплея (Этап S4), и предписывает отображение построенной точки P в целевой позиции операции построения в переднем слое в соответствии с операцией построения (Этап T5). При этом, на этапе T4 в настоящем варианте осуществления, пользователь осуществляет операцию построения посредством сенсорного экрана 30. Однако пользователь может выполнять операцию с помощью клавиши 22 курсора или клавиши EXE 23. Кроме того, ЦП 11 устанавливает цвет и форму построенной точки P на основании данных 134 установки режима отображения указанного файла 132S изображения на этапе T5. Кроме того, если построенная точка P уже отображается на момент времени этапа T5, ЦП 11, продолжая отображать построенную точку P, предписывает отображение новой построенной точки P.
Затем ЦП 11 коррелирует значение координаты построенной точки P в системе координат XY как “n”-е значение координаты со значением координаты оси T, и сохраняет значение в данных 135S указанной таблицы значений координат (Этап T6) и затем определяет, выполняет ли пользователь операцию окончания обработки режима построения множественных изображений (Этап T7).
Если на этапе T7 принято решение, что операция окончания не выполняется (Этап T7; Нет), ЦП 11 определяет, существует ли “n+1”-й фрагмент данных 133 изображения в указанном файле 132S изображения (Этап T8).
Если на этапе T8 принято решение, что “n+1”-й фрагмент данных 133 изображения существует (Этап T8; Да), то ЦП 11 увеличивает переменную “n” на “1” для повторного задания значения (Этап T9), и затем обработка переходит к вышеупомянутому этапу T3. Затем вышеупомянутая обработка на этапах T3-T9 повторно выполняется для последовательного переключения данных 133 изображения, подлежащих управляемому отображению, в указанном файле 132S изображения, и операция построения выполняется для каждого изображения. В результате, построенные точки P отображаются в целевых позициях каждой операции построения и, в качестве массы построенных точек P, отображается траектория целевых точек анализа.
Затем, если на вышеупомянутом этапе T7 принято решение, что операция окончания выполняется (Этап T7; Да), или если на вышеупомянутом этапе T8 принято решение, что “n+1”-го фрагмента данных 133 изображения не существует (Этап T8; Нет), то ЦП 11 предписывает отображение изображения данных 133S указанного изображения в заднем слое экрана дисплея 3 и заканчивает обработку режима построения множественных изображений.
Посредством вышеупомянутой обработки режима построения множественных изображений, изображение данных 133S указанного изображения отображается в полноэкранном режиме, в то же время система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается в переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой из позиций, указанных данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY.
Затем, по окончании обработки режима построения множественных изображений, как показано на фиг. 5, ЦП 11 переходит к описанному ниже этапу S10.
Кроме того, если на вышеупомянутом этапе S7 принято решение, что указанный файл 132S изображения является файлом 132B единичного изображения (Этап S7; Единичное), то ЦП 11 выполняет обработку режима построения единичного изображения (Этап S9).
В частности, согласно фиг. 7, ЦП 11, при обработке режима построения единичного изображения, сначала устанавливает ось XY в переднем слое экрана дисплея 3 на основании данных 134 установки режима отображения указанного файла 132S изображения и системы координат XY, определяемой осью (Этап U1). В частности, ЦП 11 считывает диапазон задания системы координат XY из указанного полного изображения, соответствующего данным 138S диапазона координат данных 134 установки режима отображения и устанавливает систему координат XY в диапазоне задания в области отображения изображения в переднем слое. При этом, в случае, когда информация установки для отображения координатной оси включена в данные 134 установки режима отображения, ЦП 11 предписывает отображение оси XY в переднем слое.
Затем ЦП 11 предписывает отображение изображения данных 133S указанного изображения на дисплее 3 в качестве заднего слоя системы координат XY (Этап U2) и, в то же время, устанавливает значение переменной “n” равным “1” (Этап U3).
Затем ЦП 11 позволяет пользователю выполнять операцию построения в отношении нужной целевой точки анализа в изображении в состоянии, когда изображение данных 133S указанного изображения отображается на экране дисплея (Этап U4) и предписывает отображение построенной точки P в целевой позиции операции построения в переднем слое в соответствии с операцией построения (Этап U5). При этом, на этапе U4 в настоящем варианте осуществления, пользователь осуществляет операцию построения посредством сенсорного экрана 30. Однако пользователь может выполнять операцию с помощью клавиши 22 курсора или клавиши EXE 23. Кроме того, ЦП 11 устанавливает цвет и форму построенной точки P на основании данных 134 установки режима отображения указанного файла 132S изображения на этапе U5. Кроме того, если построенная точка P уже отображается на момент времени этапа U5, ЦП 11, продолжая отображать построенную точку P, предписывает отображение новой построенной точки P.
Затем ЦП 11 коррелирует значение координаты построенной точки P в системе координат XY как “n”-е значение координаты со значением координаты оси T, и сохраняет значение в данных 135S указанной таблицы значений координат (Этап T6) и затем определяет, выполняет ли пользователь операцию окончания обработки режима построения единичного изображения (Этап U7).
Если на этапе U7 принято решение, что операция окончания не выполняется (Этап U7; Нет), ЦП 11 определяет, существует ли “n+1”-й столбец данных изображения в данных 135 таблицы значений координат указанного файла 132S изображения (Этап U8).
Если на этапе U8 принято решение, что существует “n+1”-й столбец данных изображения (Этап U8; Да), ЦП 11 увеличивает переменную “n” на “1” для повторного задания значения (Этап U9), и затем обработка переходит к вышеупомянутому этапу U4.
Затем вышеупомянутая обработка на этапах U4-U9 повторно выполняется, благодаря чему операция построения последовательно выполняется для изображения в состоянии, когда изображение данных 133S указанного изображения указанного файла 132S изображения отображается. В результате, отображаются построенные точки P целевых позиций каждой операции построения, и отображается траектория целевых точек анализа в качестве массы построенных точек P.
Затем, если на вышеупомянутом этапе U7 принято решение, что операция окончания выполняется (Этап U7; Да), или если на вышеупомянутом этапе U8 принято решение, что не существует “n+1”-го столбца данных в данных 135 таблицы значений координат указанного файла 132S изображения (Этап U8; Нет), ЦП 11 заканчивает обработку режима построения единичного изображения.
Посредством вышеупомянутой обработки режима построения единичного изображения, изображение данных 133S указанного изображения отображается в полноэкранном режиме, и, в то же время, система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается в переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой из позиций, указанных данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY.
Затем, по окончании обработки режима построения единичного изображения, как показано на фиг. 5, ЦП 11 определяет, выполняет ли пользователь операцию окончания (Этап S10) и, если принято решение, что операция выполняется (Этап S10; Да), ЦП 11 заканчивает обработку отображения информации.
Кроме того, если на этапе S10 принято решение, что операция окончания не выполняется (Этап S10; Нет), ЦП 11 определяет, выполняется ли операция инструкции отображения построенных точек P в системе координат TX или в системе координат TY (Этап S11) и, если принято решение, что операция не выполняется (Этап S11; Нет), ЦП 11 переходит к вышеупомянутому этапу S6.
Кроме того, если на этапе S11 принято решение, что операция инструкции отображения построенных точек P в системе координат TX или в системе координат TY выполняется (Этап S11; Да), ЦП 11 определяет, существуют ли данные значения координаты, которые могут быть построены в системе координат, в данных 135S указанной таблицы значений координат (Этап S12) и, если принято решение, что таких данных не существует (Этап S12; Нет), ЦП 11 переходит к вышеупомянутому этапу S6.
Кроме того, если на этапе S12 принято решение, что данные значения координаты существуют (Этап S12; Да), то ЦП 11 выполняет обработку разделения экрана (Этап S13) и переходит к вышеупомянутому этапу S6.
При этом, в ходе обработке разделения экрана, ЦП 11 сначала выполняет обработку задания левого экрана, как показано на фиг. 8 (Этап V1).
В частности, согласно фиг. 9, ЦП 11 сначала определяет, включено ли уменьшенное изображение, соответствующее данным 139 диапазона координат в указанный файл 132S изображения при обработке задания левого экрана (Этап W1).
Если на этапе W1 принято решение, что уменьшенное изображение, соответствующее данным 139 диапазона координат, включено (Этап W1; Да), то ЦП 11 обрезает изображение данных 133S указанного изображения, которое перекрывается в системе координат XY полным изображением, соответствующим данным 138 диапазона координат, чтобы оставить только часть изображения диапазона, соответствующего уменьшенному изображению, соответствующему данным 139 диапазона координат (Этап W2).
Затем ЦП 11 устанавливает обработанную часть изображения в качестве содержимого отображения в заднем слое левосторонней области отображения 3A дисплея 3 (Этап W3) и заканчивает обработку задания левого экрана.
Кроме того, если на вышеупомянутом этапе W1 принято решение, что уменьшенное изображение, соответствующее данным 139 диапазона координат, не включено в указанный файл 132S изображения (Этап W1; Нет), то ЦП 11 считывает значения координат построенных точек P в системе координат XY из данных 135S указанной таблицы значений координат и вычисляет приближенную кривую для массы построенных точек P (Этап W11). При этом, ЦП 11 может накладывать приближенную кривую на массу построенных точек P для отображения кривой на дисплее 3. Кроме того, тип вычисляемой приближенной кривой автоматически определяется ЦП 11 с использованием известного способа на основании состояния распределения построенных точек P. Альтернативно, тип приближенной кривой может вводиться посредством пользовательской операции, или может вводиться сама приближенная кривая.
Затем ЦП 11 определяет, имеет ли вычисленная или введенная приближенная кривая форму окружности или правильного многоугольника (Этап W12) и, если принято решение, что кривая не принимает такую форму (Этап W12; Нет), ЦП 11 уменьшает изображение данных 133S указанного изображения до заранее определенного размера, имеющего другое аспектное отношение (ниже именуемого уменьшенный размер с изменением аспектного отношения) (Этап W13) и переходит к вышеупомянутому этапу W3. При этом, на этапе W13, ЦП 11 использует размер изображения в состоянии полноэкранного отображения, который уменьшается на заранее определенную величину только в горизонтальном направлении (в частности, размер, уменьшенный меньше, чем наполовину исходного размера) в качестве уменьшенного размера с изменением аспектного отношения, чтобы полное изображение данных 133S указанного изображения могло отображаться в левосторонней области отображения 3A. Однако, в случае, когда экран дисплея 3 делится на верхнюю и нижнюю половины, ЦП 11 может использовать размер отображения изображения, который уменьшается вполовину от исходного размера в направлениях вверх и вниз, в качестве уменьшенного размера с изменением аспектного отношения на этапе W13.
Кроме того, если на вышеупомянутом этапе W12 принято решение, что приближенная кривая имеет форму окружности или правильного многоугольника (Этап W12; Да), ЦП 11 определяет, все ли построенные точки P (целевые точки анализа в изображении) в системе координат XY, которая накладывается на изображение, могут визуализироваться в левосторонней области отображения 3A в случае, когда изображение данных 133S указанного изображения отображается в левосторонней области отображения 3A без уменьшения, другими словами, все ли построенные точки P в системе координат XY могут визуализироваться в левосторонней области отображения 3A путем обрезки изображения данных 133S указанного изображения и наложения системы координат XY на изображение (Этап W15).
Если на этапе W15 принято решение, что все построенные точки P могут визуализироваться в левосторонней области отображения 3A (Этап W15; Да), ЦП 11 обрезает изображение данных 133S указанного изображения до заранее определенного размера (ниже именуемого размером обрезки) (Этап W16) и затем переходит к вышеупомянутому этапу W3. При этом, на этапе W16, ЦП 11 использует размер, посредством которого изображение данных 133S указанного изображения обрезается только до части изображения, включающей в себя все построенные точки (целевые точки анализа), в качестве размера обрезки.
Кроме того, если на этапе W15 принято решение, что все построенные точки P не могут визуализироваться в левосторонней области отображения 3A (W15; Нет), то ЦП 11 уменьшает изображение данных 133S указанного изображения до заранее определенного размера, имеющего такое же аспектное отношение (ниже именуемый уменьшенным размером без изменения аспектного отношения) (Этап W17) и затем переходит к вышеупомянутому этапу W3. При этом, на этапе W17, ЦП 11 использует размер, при котором размер отображения для изображения данных 133S указанного изображения в состоянии полноэкранного отображения одинаково уменьшается в горизонтальном и вертикальном направлениях, благодаря чему полное изображение может отображаться в левосторонней области отображения 3A (в частности, размер, который уменьшается наполовину или менее в каждом направлении) в качестве уменьшенного размера без изменения аспектного отношения.
По окончании вышеупомянутой обработки задания левого экрана, как показано на фиг. 8, ЦП 11 определяет, выполняется ли операция инструкции отображения в системе координат TX на вышеупомянутом этапе S11 (см. фиг. 5) (Этап V2) и если принято решение, что операция не выполняется, т.е. принято решение, что операция инструкции отображения в системе координат TY выполняется (Этап V2; Нет), ЦП 11 устанавливает систему координат TY в правосторонней области отображения 3B дисплея 3 (Этап V3), и затем ЦП 11 переходит к описанному ниже этапу V5. В частности, на этапе V3, ЦП 11 устанавливает ось T в диапазоне, где каждое значение координаты, указанное данными 135S указанной таблицы значений координат, включено в правостороннюю область отображения 3B в направлении оси T, тогда как в направлении оси Y ЦП 11 устанавливает такой же диапазон, как в направлении оси Y в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают) для задания системы координат TY в правосторонней области отображения 3B.
Кроме того, если на вышеупомянутом этапе V2 принято решение, что операция инструкции отображения в системе координат TX выполняется (Этап V2; Да), то ЦП 11 устанавливает систему координат TX в правосторонней области отображения 3B дисплея 3 (Этап V4). В частности, на этапе V4, ЦП 11 устанавливает ось T в диапазоне, где каждое значение координаты, указанное данными 135S указанной таблицы значений координат включено в правостороннюю область отображения 3B в направлении оси T, тогда как в направлении оси X ЦП 11 устанавливает такой же диапазон, как в направлении оси X в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают) для задания системы координат TX в правосторонней области отображения 3B.
Затем ЦП 11 переводит дисплей 3 в состояние разделенного отображения и, в то же время, предписывает отображение изображения данных 133S указанного изображения и построенных точек P для отображения в левосторонней области отображения 3A и построенных точек P в правосторонней области отображения 3B на основании вышеупомянутого этапа V1 и содержания установки на этапе V3 или V4 (Этап V5). В частности, на этапе V5, ЦП 11 предписывает отображение по меньшей мере части изображения данных 133S указанного изображения в заднем слое левосторонней области отображения 3A, с размером изображения, установленным на этапе V1, т.е. размером, который меньше размера отображения в состоянии полноэкранного отображения, и, в то же время, устанавливает систему координат XY, имеющую диапазон, установленный для перекрытия части изображения в указанном полном изображении, соответствующем данным 138S диапазона координат в переднем слое левосторонней области отображения 3A. Затем ЦП 11 предписывает отображение построенных точек P в каждой позиции, которая указана данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Кроме того, ЦП 11 предписывает отображение построенных точек P в каждой из позиций, которые указаны данными 135S указанной таблицы значений координат, среди каждой координатной позиции в системе координат TX или в системе координат TY в диапазоне, установленном на этапе V3 или V4.
Затем ЦП 11 определяет, выполняется ли клавишная операция (Этап V6) и, если принято решение, что операция не выполняется (Этап V6; Нет), ЦП 11 заканчивает обработку разделения.
Кроме того, в случае, когда принимается решение, что клавишная операция выполняется на этапе V6 и предписывается переключение экрана (Этап V6; Да, переключение экранов), ЦП 11 переключает размер отображения изображения данных 133S указанного изображения в левосторонней области отображения 3A для обновления содержимого отображения дисплея 3 (Этап V7) и переходит к вышеупомянутому этапу V6. В частности, на этапе V7, ЦП 11 последовательно переключает размер отображения изображения между вышеупомянутым уменьшенным размером с изменением аспектного отношения, уменьшенным размером без изменения аспектного отношения и размером обрезки всякий раз, когда выполняется операция инструкции для переключения отображения. Кроме того, в это время, ЦП 11 устанавливает систему координат XY в диапазоне, установленном для перекрытия части изображения, отображаемого в левосторонней области отображения 3A, на передний слой левосторонней области отображения 3A и предписывает отображение построенных точек P в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Кроме того, в это время, ЦП 11 переустанавливает диапазон в направлении оси X или в направлении оси Y в правосторонней области отображения 3B таким же, как диапазон в направлении оси X или в направлении оси Y, вновь заданный в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают), и предписывает отображение построенных точек P в каждой позиции, указанной данными 135S указанной таблицы значений координат среди каждой координатной позиции в переустановленной системе координат TX или системе координат TY.
Кроме того, в случае, когда на вышеупомянутом этапе V6 принимается решение, что клавишная операция выполняется, и если предписывается отображение приближенной кривой (Этап V6; Да, приближенная кривая), ЦП 11 вычисляет приближенную кривую для массы построенных точек, отображаемых в правосторонней области отображения 3B, предписывает наложение приближенной кривой на массу построенных точек P для отображения в правосторонней области отображения 3B (Этап V8) и затем переходит к вышеупомянутому этапу V6.
Кроме того, если на вышеупомянутом этапе V6 принято решение, что клавишная операция выполняется и предписывается трассировка построенных точек P (Этап V6; Да, трассировка), ЦП 11 выбирает любую из построенных точек P, отображаемых в правосторонней области отображения 3B в качестве выбранной построенной точки P1, обнаруживает построенную точку P, имеющую значение координаты, которое соответствует координате выбранной построенной точки P1 среди построенных точек, отображаемых в левосторонней области отображения 3A, в качестве соответствующей построенной точки P2, и предписывает, соответственно, идентификацию выбранной построенной точки P1 и соответствующей построенной точки P2 для отображения (Этап V9). Однако, в это время, ЦП 11 может выбирать построенную точку P в левосторонней области отображения 3A в качестве выбранной построенной точки P1 и обнаруживать построенную точку P в правосторонней области отображения 3B в качестве соответствующей построенной точки P2. При этом, в настоящем варианте осуществления, объяснение будет дано исходя из того, что ЦП 11 идентифицирует построенные точки P, делая их мигающими. Однако, в другом варианте осуществления, построенные точки можно идентифицировать в другом режиме. Кроме того, построенная точка, имеющая значение координаты, которое соответствует координате выбранной построенной точки P1 среди построенных точек P, отображаемых в левосторонней области отображения 3A, означает построенную точку P, имеющую соответствующее значение координаты X в случае, когда в правосторонней области отображения 3B установлена система координат TX, и построенную точку P, имеющую соответствующее значение координаты Y в случае, когда в ней установлена система координат TY.
Затем ЦП 11 определяет, предписана ли смена цвета построенной точки P (Этап V10), и если принято решение, что смена предписана (Этап V10; Да), ЦП 11 изменяет цвет отображения построенных точек P, которые идентифицируются для отображения (выбранной построенной точки P1 и соответствующей построенной точки P2) (Этап V11) и затем переходит к вышеупомянутому этапу V6.
Кроме того, если на этапе V10 принято решение, что смена цвета не предписана (Этап V10; Нет), ЦП 11 определяет, задействована ли клавиша курсора 22 (Этап V12), и если принято решение, что клавиша не задействована (Этап V12; Нет), ЦП 11 переходит к вышеупомянутому этапу V6.
Кроме того, если на этапе V12 принято решение, что клавиша курсора 22 задействована (Этап V12; Да), ЦП 11 переключает построенные точки P, идентифицируемые для отображения, на предписанное направление (Этап V13) и переходит к вышеупомянутому этапу V6. В частности, на этапе V13, ЦП 11 переключает выбранную построенную точку P1 на направление, предписанное клавишей курсора 22 в правосторонней области отображения 3B, обнаруживает построенную точку P, имеющую значение координаты, соответствующее координате выбранной построенной точки P1 среди каждой из построенных точек P, отображаемых в левосторонней области отображения 3A, в качестве новой соответствующей построенной точки P2 и предписывает идентификацию построенных точек P для отображения.
Кроме того, в случае, когда принимается решение, что клавишная операция выполняется, и предписывается отображение списка значений координат (Этап V6; Да, список значений координат), ЦП 11 предписывает отображение содержимого 135S указанной таблицы значений координат на дисплее 3 (Этап V15) и затем переходит к вышеупомянутому этапу V6. При этом, в случае, когда цвет отображения построенной точки P изменяется на вышеупомянутом этапе V11, ЦП 11 предписывает отображение значения координаты построенной точки с измененным цветом отображения в измененном цвете отображения на этапе V15.
1.4 Пример операции
Далее следует дополнительное подробное объяснение вышеупомянутого порядка работы альфа-калькулятора 1 со ссылкой на чертежи.
Пример операции 1
Прежде всего, согласно фиг. 10A, на дисплее 3 отображается экран меню выбора различных режимов (Этап S1). Если пользователь осуществляет операцию выбора режима графического рисунка в этом состоянии (Этап S2; Да), как показано на фиг. 10B, на дисплее 3 отображается экран указания выбора файла 132 изображения.
Затем, если пользователь указывает файл 132 изображения, имеющий имя файла [wheel.g3p] из группы 131 файлов изображения (Этап S3), как показано на фиг. 3, данные 133 изображения, полное изображение, соответствующее данным 138 диапазона координат, и данные 135 таблицы значений координат в указанном файле 132S изображения считываются в качестве данных 133S указанного изображения, указанного полного изображения, соответствующего данным 138S диапазона координат, и данных 135S указанной таблицы значений координат и, в то же время, дисплей 3 переводится в состояние полноэкранного отображения, как показано на фиг. 11A, благодаря чему изображение данных 133S указанного изображения отображается в полноэкранном режиме в заднем слое дисплея 3 (Этап S4).
Затем принимается решение, что данные 135S указанной таблицы значений координат включают в себя информацию значения координаты XY (Этап S5; Да), система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается в переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY (Этап S50).
Затем, если пользователь осуществляет операцию инструкции отображения построенных точек P в системе координат TY (Этап S11; Да), принимается решение, что в данных 135S указанной таблицы значений координат существуют данные значения координаты, которые могут быть построены в системе координат TY, (Этап S12; Да).
Затем принимается решение, что указанный файл 132S изображения не включает в себя уменьшенное изображение, соответствующее данным 139 диапазона координат (Этап W1; Нет), значения координат построенных точек P (-12.7, 1.6), (-42.9, 24.2), … в системе координат XY считываются из данных 135S указанной таблицы значений координат и вычисляется приближенная кривая для массы этих построенных точек P (Этап W11).
Затем принимается решение, что вычисленная таким образом приближенная кривая выражает окружность (Этап W12; Да), и что все построенные точки P (целевые точки анализа в изображении) в системе координат XY не могут визуализироваться в левосторонней области отображения 3A, если изображение, которое перекрывается системой координат XY, данных 133S указанного изображения отображается в левосторонней области отображения 3A без уменьшения размера (Этап W15; Нет). Затем изображение данных 133S указанного изображения уменьшается наполовину в горизонтальном направлении и наполовину в вертикальном направлении, что является уменьшенным размером без изменения аспектного отношения (Этап W17), после чего обработанная часть изображения устанавливается в качестве содержимого отображения в заднем слое левосторонней области отображения 3A на дисплее 3 (Этап W3).
Затем система координат TY устанавливается в правосторонней области отображения 3B дисплея 3 (Этап V3). В частности, ось T устанавливается в диапазоне, где каждое значение координаты (0, 10, 20, 30, …), указанное данными 135S указанной таблицы значений координат, включено в правостороннюю область отображения 3B в направлении оси T, тогда как в направлении оси Y диапазон является таким же, как диапазон в направлении оси Y в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают) для задания системы координат TY в правосторонней области отображения 3B.
Затем, согласно фиг. 11B, дисплей 3 переводится в состояние разделенного отображения, и изображение данных 133S указанного изображения и построенные точки P отображаются в левосторонней области отображения 3A, и построенные точки P отображаются в правосторонней области отображения 3B на основании вышеупомянутого содержания установки (Этап V5). В частности, изображение данных 133S указанного изображения, имеющее размер, установленный на этапах W3 и W17, т.е. размер, который меньше размера отображения в состоянии полноэкранного отображения, отображается в заднем слое в левосторонней области отображения 3A, и система координат XY в диапазоне, установленном указанным полным изображением, соответствующим данным 138S диапазона координат, для перекрытия части изображения, устанавливается в переднем слое левосторонней области отображения 3A. Кроме того, построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Кроме того, система координат TY в диапазоне, установленном на этапе V3, задается в правосторонней области отображения 3B, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат TY.
Затем, если пользователь предписывает трассировку построенных точек P (Этап V6; Да, трассировка), как показано на фиг. 11C, любая из построенных точек P, отображаемых в правосторонней области отображения 3B, выбирается в качестве выбранной построенной точки P1. Построенная точка P, имеющая соответствующее значение координаты к выбранной построенной точке P1, выбирается среди построенных точек P, отображаемых в левосторонней области отображения 3A, в качестве соответствующей построенной точки P2, и выбранная построенная точка P1 и соответствующая построенная точка P2 соответственно идентифицируются для отображения (Этап V9).
Затем, если пользователь предписывает изменение цвета построенных точек P (Этап V10; Да), цвет отображения построенных точек P (выбранной построенной точки P1 и соответствующей построенной точки P2), которые идентифицируются для отображения, изменяется, как показано на фиг. 11D и фиг. 12A (Этап V11). При этом, на фиг. 11D показано состояние, когда экран выбора цвета отображения построенной точки P отображается на дисплее 3, и пользователь выбирает “лайм” в качестве цвета отображения с помощью экрана выбора. Кроме того, предполагается, что построенные точки P отображаются жирными линиями, и численные значения указывают, что их цвет отображения является “лайм”.
Затем, если пользователь предписывает отображение списка значений координат (Этап V6; Да, список значений координат), содержимое 135S указанной таблицы значений координат отображается на дисплее 3, как показано на фиг. 12B (Этап V15). При этом, значение координаты построенной точки P с измененным цветом отображения отображается в измененном цвете отображения “лайм”.
Затем, если пользователь предписывает отображение приближенной кривой (Этап V6; Да, приближенная кривая), приближенная кривая для массы построенных точек, отображаемая в правосторонней области отображения 3B, вычисляется и отображается в правосторонней области отображения 3B, перекрывая массу построенных точек P, как показано на фиг. 12C (Этап V8).
Затем, если пользователь предписывает переключение экранов (Этап V6; Да, переключение экрана), как показано на фиг. 12D, размер отображения изображения данных 133S указанного изображения в левосторонней области отображения 3A переключается на уменьшенный размер с изменением аспектного отношения. В то же время, система координат XY в диапазоне, установленном для перекрытия части изображения, отображаемого в левосторонней области отображения 3A, устанавливается в переднем слое левосторонней области отображения 3A на основании указанного полного изображения, соответствующего данным 138S диапазона координат, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY (Этап V7). Кроме того, в это время, диапазон в направлении оси Y в правосторонней области отображения 3B переустанавливается таким же, как диапазон в направлении оси Y, переустановленный в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают), и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат среди переустановленных координатных позиций системы координат TY.
Пример операции 2
Прежде всего, по аналогии с вышеупомянутыми фиг. 10A и 10B, из состояния, когда экран меню выбора каждого режима отображается на дисплее 3 (Этап S1), если пользователь осуществляет операцию выбора режима графического рисунка (Этап S2; Да) и указывает файл изображения, имеющий имя файла “wheel.g3p”, из группы 131 файлов изображения (Этап S3), как показано на фиг. 3, данные 133 изображения, полное изображение, соответствующее данным 138 диапазона координат, и данные 135 таблицы значений координат в указанном файле 132S изображения считываются в качестве данных 133S указанного изображения, указанного полного изображения, соответствующего данным 138S диапазона координат, и данных 135S указанной таблицы значений координат. Дисплей 3 переводится в состояние полноэкранного отображения, и изображение данных 133S указанного изображения отображается в полноэкранном режиме на заднем слое дисплея 3, как показано на фиг. 13A (Этап S4). При этом, в примере операции 2, позиции целевых точек анализа (гондол) сосредоточены в большей степени в центральной части в горизонтальном направлении в изображении по сравнению с вышеупомянутым примером операции 1.
Затем принимается решение, что данные 135S указанной таблицы значений координат включают в себя информацию значения координаты XY (Этап S5; Да), система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается в переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY (Этап S50).
Затем, если пользователь осуществляет операцию инструкции отображения построенных точек P в системе координат TY (Этап 11; Да), принимается решение, что данные значения координаты, которые могут быть построены в системе координат TY, существуют в данных 135S указанной таблицы значений координат (Этап S12; Да).
Затем принимается решение, что указанный файл 132S изображения не включает в себя уменьшенное изображение, соответствующее данным 139 диапазона координат (Этап W1; Нет), значения координат построенных точек P (-12.7, 1.6), (-42.9, 24.2), … в системе координат XY считываются из данных 135S указанной таблицы значений координат, и вычисляется приближенная кривая для массы этих построенных точек P (Этап W11).
Затем принимается решение, что вычисленная таким образом приближенная кривая является окружностью (Этап W12; Да). Кроме того, принимается решение, что в случае, когда изображение данных 133S указанного изображения отображается в левосторонней области отображения 3A без уменьшения размера изображения, все построенные точки P в системе координат XY, перекрывающие изображение, могут визуализироваться в левосторонней области отображения 3A (Этап W15; Да). Затем изображение данных 133S указанного изображения обрезается, чтобы оставлять только часть изображения, включающую в себя все построенные точки (целевые точки анализа) (Этап W16), и затем часть обработанного таким образом изображения устанавливается в качестве содержимого отображения в заднем слое левосторонней области отображения 3A на дисплее 3 (Этап W3).
Затем система координат TY устанавливается в правосторонней области отображения 3B дисплея 3 (Этап V3). В частности, ось T устанавливается в диапазоне, где каждое значение координаты (0, 10, 20, 30, …), указанное данными 135S указанной таблицы значений координат включено в правостороннюю область отображения 3B в направлении оси T, тогда как в направлении оси Y диапазон является таким же, как диапазон в направлении оси Y в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают) для задания системы координат TY в правосторонней области отображения 3B.
Затем, как показано на фиг. 13B, дисплей 3 переводится в состояние разделенного отображения, и изображение данных 133S указанного изображения, и построенные точки P отображаются в левосторонней области отображения 3A, и построенные точки P отображаются в правосторонней области отображения 3B на основании вышеупомянутого содержания установки (Этап V5). В частности, часть изображения данных 133S указанного изображения после обрезки имеющая размер изображения, установленный на этапах W3 и W16, т.е. размер, который меньше размера отображения в состоянии полноэкранного отображения, отображается в заднем слое левосторонней области отображения 3A. Система координат XY в диапазоне, установленном указанным полным изображением, соответствующим данным 138S диапазона координат, для перекрытия части изображения устанавливается в переднем слое левосторонней области отображения 3A, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Кроме того, система координат TY в диапазоне, установленном на этапе V3, устанавливается в правосторонней области отображения 3B, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат среди каждой координатной позиции системы координат TY.
(Пример операции 3)
Прежде всего, по аналогии с фиг. 10A и 10B, из состояния, когда экран меню выбора каждого режима отображается на дисплее 3 (Этап S1), пользователь выполняет операцию выбора режима графического рисунка (Этап S2; Да) и указывает файл 132 изображения, имеющий имя файла “basketball.g3p”, из группы 131 файлов изображения (Этап S3). Затем данные 133 изображения, полное изображение, соответствующее данным 138 диапазона координат, и данные 135 таблицы значений координат указанного файла 132S изображения считываются в качестве данных 133S указанного изображения, указанного полного изображения, соответствующего данным 138S диапазона координат, и данных 135S указанной таблицы значений координат. Кроме того, согласно фиг. 14A, дисплей 3 переводится в состояние полноэкранного отображения, и изображение данных 133S указанного изображения отображается в полноэкранном режиме в заднем слое дисплея 3 (Этап S4).
Затем принимается решение, что данные 135S указанной таблицы значений координат включают в себя информацию значения координаты XY (Этап S5; Да), система координат XY в диапазоне, указанном указанным полным изображением, соответствующим данным 138S диапазона координат, устанавливается в переднем слое экрана дисплея 3, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY (Этап S50).
Затем, если пользователь осуществляет операцию инструкции отображения построенных точек P в системе координат TX (Этап 11; Да), принимается решение, что данные значения координаты, которые могут быть построены в системе координат TX, существуют в данных 135S указанной таблицы значений координат (Этап S12; Да).
Затем принимается решение, что указанный файл 132S изображения не включает в себя уменьшенное изображение, соответствующее данным 139 диапазона координат (Этап W1; Нет), значения координат построенных точек P (2.1, 3.8), (2.5, 4.5), … в системе координат XY считываются из данных 135S указанной таблицы значений координат, и вычисляется приближенная кривая для массы этих построенных точек P (Этап W11).
Затем принимается решение, что вычисленная таким образом приближенная кривая не имеет формы окружности или правильного многоугольника (Этап W12; Нет), изображение данных 133S указанного изображения уменьшается наполовину только в горизонтальном направлении (Этап W13), и часть обработанного таким образом изображения устанавливается в качестве содержимого отображения в заднем слое левосторонней области отображения 3A дисплея 3 (Этап W3).
Затем система координат TX устанавливается в правосторонней области отображения 3B дисплея 3 (Этап V4). В частности, ось T устанавливается в диапазоне, где каждое значение координаты (0.19, 0.40, …), указанное данными 135S указанной таблицы значений координат, включено в правостороннюю область отображения 3B в направлении оси T, тогда как в направлении оси X диапазон является таким же, как диапазон в направлении оси X в левосторонней области отображения 3A (диапазон, где верхние предельные значения и нижние предельные значения соответственно совпадают) для задания системы координат TX в правосторонней области отображения 3B.
Затем, согласно фиг. 14B, дисплей 3 переводится в состояние разделенного отображения, и изображение данных 133S указанного изображения, и построенные точки P отображаются в левосторонней области отображения 3A, и построенные точки P отображаются в правосторонней области отображения 3B на основании вышеупомянутого содержания установки (Этап V5). В частности, изображение данных 133S указанного изображения, имеющее размер, установленный на этапах W3 и W13, т.е. размер, который меньше размера отображения в состоянии полноэкранного отображения, отображается в заднем слое в левосторонней области отображения 3A. Система координат XY в диапазоне, установленном указанным полным изображением, соответствующим данным 138S диапазона координат, для перекрытия части изображения, устанавливается в переднем слое левосторонней области отображения 3A, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Кроме того, система координат TX в диапазоне, установленном на этапе V3, устанавливается в правосторонней области отображения 3B, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат TX.
Как описано выше, согласно настоящему варианту осуществления, как показано на этапе V5 на фиг. 8, фиг. 10A, фиг. 10B, фиг. 11A-11D, и т.п., если какой-либо файл 132 изображения из группы 131 файлов изображения указан в качестве указанного файла 132S изображения, данные 133 изображения, полное изображение, соответствующее данным 138 диапазона координат, и данные 135 таблицы значений координат считываются из указанного файла 132S изображения, соответственно, в качестве данных 133S указанного изображения, указанного полного изображения, соответствующего данным 138S диапазона координат, и данных 135S указанной таблицы значений координат. По меньшей мере, часть изображения данных 133S указанного изображения отображается в левосторонней области отображения 3A. Система координат XY в диапазоне, перекрывающем часть изображения в указанном полном изображении, соответствующем данным 138S диапазона координат, устанавливается в левосторонней области отображения 3A, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Таким образом, это позволяет проводить исследование, коррелируя событие реальной жизни с распределением построенных точек P и, в то же время, анализировать, какой математический смысл имеет распределение.
Кроме того, согласно фиг. 3, этапам V3 и V4 на фиг. 8, фиг. 11A-11D, и т.п., данные 135 таблицы значений координат коррелируют значение координаты на оси T со значением координаты в системе координат XY. Система координат TX или система координат TY задана в правосторонней области отображения 3B, и построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат среди каждой координатной позиции системы координат. Таким образом, это позволяет коррелировать распределение построенных точек P в трехмерном пространстве с событием реальной жизни путем одновременного обращения к левосторонней области отображения 3A и правосторонней области отображения 3B.
Таким образом, это позволяет получать более высокий обучающий эффект пользователя, чем в традиционном случае.
Кроме того, как показано на этапе V9 на фиг. 8, фиг. 11C, и т.п., если построенная точка P, отображаемая в левосторонней области отображения 3A или правосторонней области отображения 3B, выбирается в качестве выбранной построенной точки P1 на основании пользовательской операции, построенная точка P, имеющая значение координаты, которое соответствует с координатой выбранной построенной точки P1, выявляется в качестве соответствующей построенной точки P2 среди каждой из построенных точек P, отображаемых в другой области отображения, и выбранные построенную точку P1 и соответствующую построенную точку P2 можно соответственно идентифицировать для отображения. Таким образом, это позволяет легко понять соответствующее соотношение между построенными точками в каждой системе координат.
Кроме того, как показано на этапе V11 на фиг. 8, фиг. 11D, фиг. 12A и 12B, и т.п., если цвет отображения построенных точек P, которые, как предполагается, являются выбранной построенной точкой P1 и соответствующей построенной точкой P2, изменяется на основании пользовательской операции, и содержимое 135S указанной таблицы значений координат отображается на основании пользовательской операции, то значение координаты построенной точки P с измененным цветом отображения отображается в цвете после изменения. Таким образом, это позволяет подтвердить, какая из построенных точек подлежит изменению цвета отображения в таблице значений координат.
Кроме того, как показано на этапе V9 на фиг. 8, фиг. 11C, и т.п., поскольку одна область отображения является правосторонней областью отображения 3B, в отличие от случая, когда левосторонняя область отображения 3A, в которой построенные точки P могут отображаться по кругу, является одной областью отображения, можно препятствовать возникновению совокупности построенных точек P в направлении, указанном клавишей курсора 22. Таким образом, это позволяет легко выбирать произвольную построенную точку P с помощью клавиши 22 курсора.
Кроме того, как показано на этапах V3 и V4 на фиг. 8, фиг. 11B, фиг. 14B, и т.п., в направлении оси X или оси Y в системе координат TX или в системе координат TY, система координат устанавливается в правосторонней области отображения 3B в диапазоне, где верхние предельные значения и нижние предельные значения, соответственно, совпадают в направлении соответствующей оси в левосторонней области отображения 3A. Таким образом, это позволяет пользователю проводить исследования, коррелируя распределение построенных точек P в системе координат XY и распределение построенных точек P в системе координат TX, в системе координат TY или в системе координат TXY.
Кроме того, как показано на этапе V7 на фиг. 8, фиг. 12C, фиг. 12D, и т.п., изображение данных 133S указанного изображения отображается в левосторонней области отображения 3A в любом размере, выбранном посредством пользовательской операции из трех типов размеров: уменьшенного размера с изменением аспектного отношения, при котором размер отображения для изображения в состоянии полноэкранного отображения уменьшается только в горизонтальном направлении на заранее определенную величину, чтобы полное изображение данных 133S указанного изображения могло отображаться в левосторонней области отображения 3A; уменьшенного размера без изменения аспектного отношения, при котором размер отображения для изображения в состоянии полноэкранного отображения одинаково уменьшается в горизонтальном и вертикальном направлениях, чтобы полное изображение данных 133S указанного изображения могло отображаться в левосторонней области отображения 3A; и размера обрезки, при котором изображение данных 133S указанного изображения обрезается, чтобы оставлять только часть изображения, включающую в себя все целевые точки анализа. В то же время, система координат XY в диапазоне, установленном для перекрытия части изображения, отображаемого в левосторонней области отображения 3A, устанавливается в левосторонней области отображения 3A, на основании указанного полного изображения, соответствующего данным 138S диапазона координат. Построенные точки P отображаются в каждой позиции, указанной данными 135S указанной таблицы значений координат, среди каждой координатной позиции системы координат XY. Таким образом, это позволяет предписывать отображение изображения с различными размерами и предписывать отображение построенных точек P согласно изображению.
Кроме того, как показано на этапах W16 и W17 на фиг. 9, фиг. 11B, фиг. 13B, и т.п., если принято решение, что приближенная кривая для массы построенных точек P в системе координат XY имеет форму окружности или правильного многоугольника, размер изображения данных 133S указанного изображения, отображаемого в левосторонней области отображения 3A, устанавливается как уменьшенный размер без изменения аспектного отношения или размер обрезки. Таким образом, это позволяет уменьшать размер изображения данных 133S указанного изображения для отображения без изменения формы, выражаемой массой построенных точек P. С другой стороны, как показано на этапе W13 фиг. 9, фиг. 14B, и т.п., если принято решение, что приближенная кривая не имеет формы окружности или правильного многоугольника, размер изображения данных 133S указанного изображения, отображаемого в левосторонней области отображения 3A, устанавливается как уменьшенный размер с изменением аспектного отношения. Таким образом, это позволяет препятствовать чрезмерному уменьшению изображения по сравнению со случаем, когда изображение одинаково уменьшается в горизонтальном и вертикальном направлениях.
При этом, очевидно, что детали каждого элемента конфигурации и детали порядка работы альфа-калькулятора 1 согласно вышеупомянутому варианту осуществления можно надлежащим образом изменять, не выходя за рамки объема настоящего изобретения.
Например, объяснение было дано исходя из того, что устройством отображения, согласно настоящему изобретению, является альфа-калькулятор 1. Однако настоящее изобретение можно применять не только к этому изделию, но и к электронным устройствам в целом, например сотовому телефону, персональному компьютеру, карманному персональному компьютеру (КПК), игровому устройству. Кроме того, программу 130 отображения информации и группу 131 файлов изображения, согласно настоящему изобретению, можно сохранять в карте памяти, на CD, и т.п., которые можно присоединять с возможностью отсоединения к альфа-калькулятору 1.
Кроме того, объяснение было дано исходя из того, что координатной осью каждой системы координат является ось X, ось Y, или ось T. Однако можно использовать другие имена координатных осей. Кроме того, объяснение было дано исходя из того, что система координат является ортогональной системой координат. Однако система координат может быть другой системой координат, например косоугольной системой координат или полярной системой координат. Кроме того, объяснение было дано исходя из того, что в правосторонней области отображения 3B задана система координат TX или система координат TY. Однако можно задать систему координат XYT.
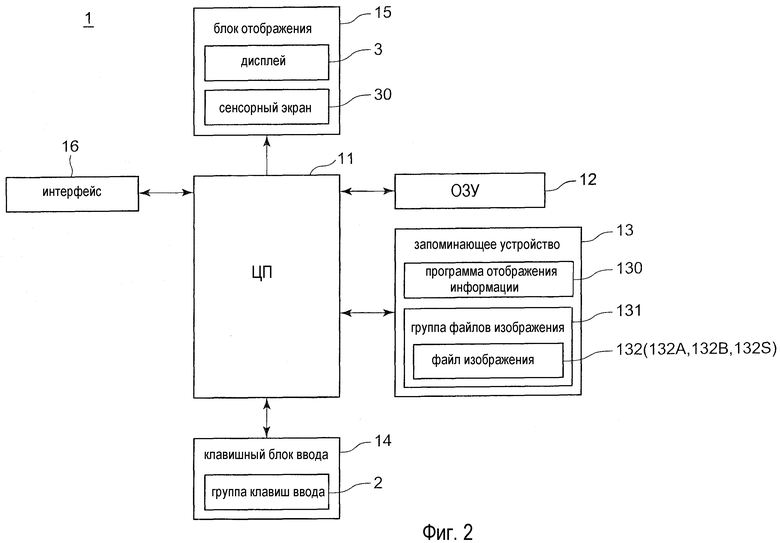
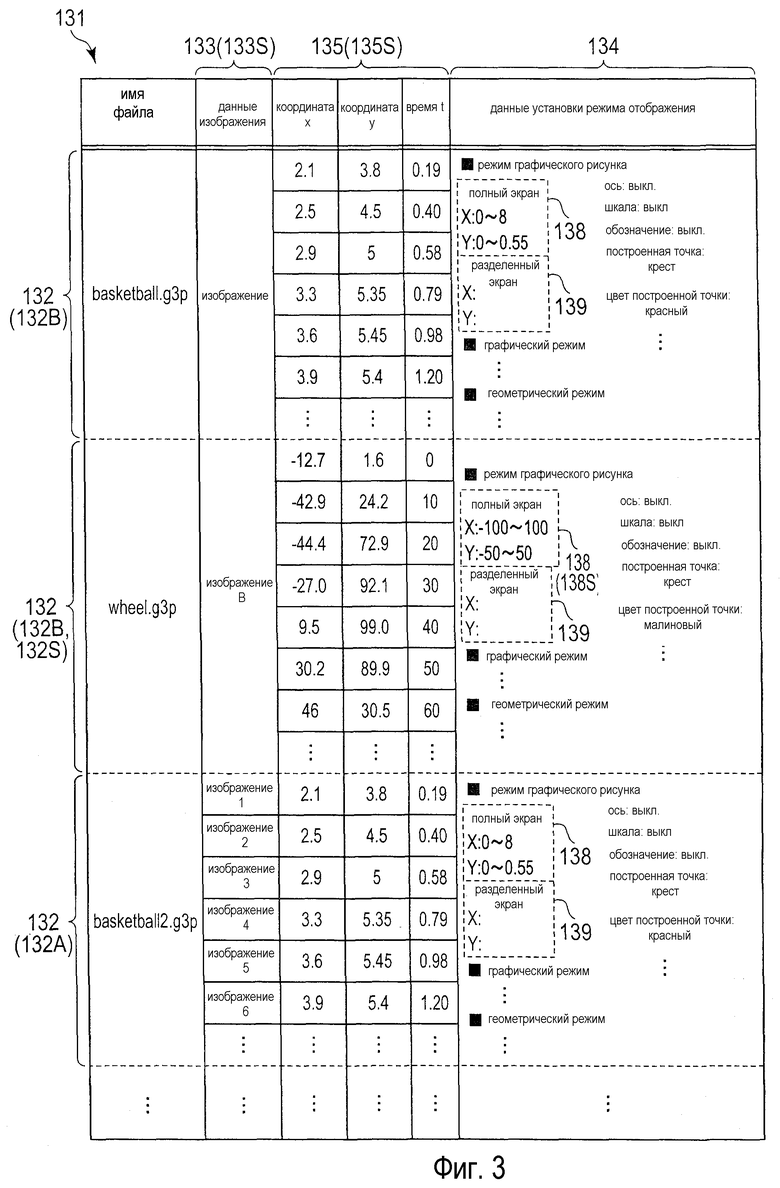
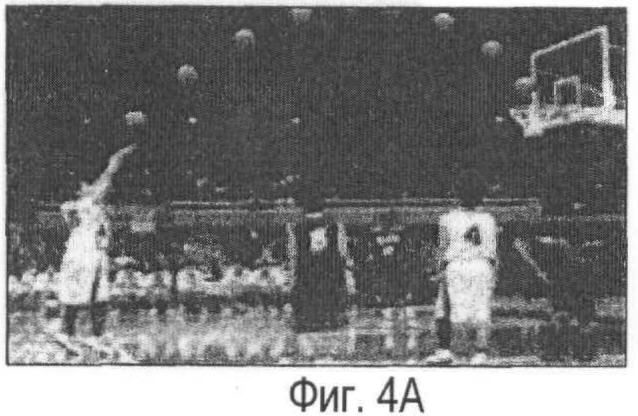
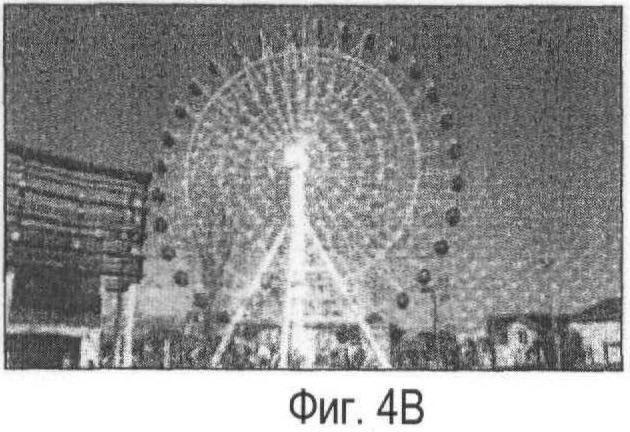
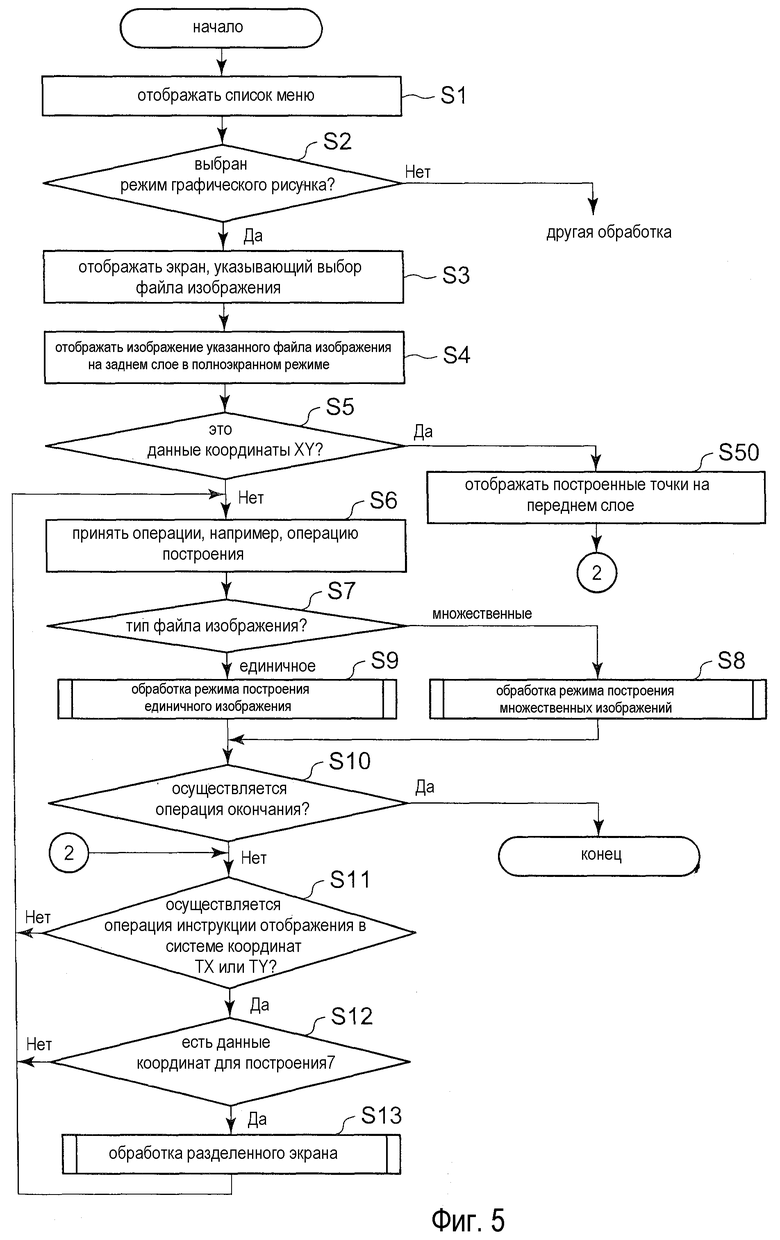
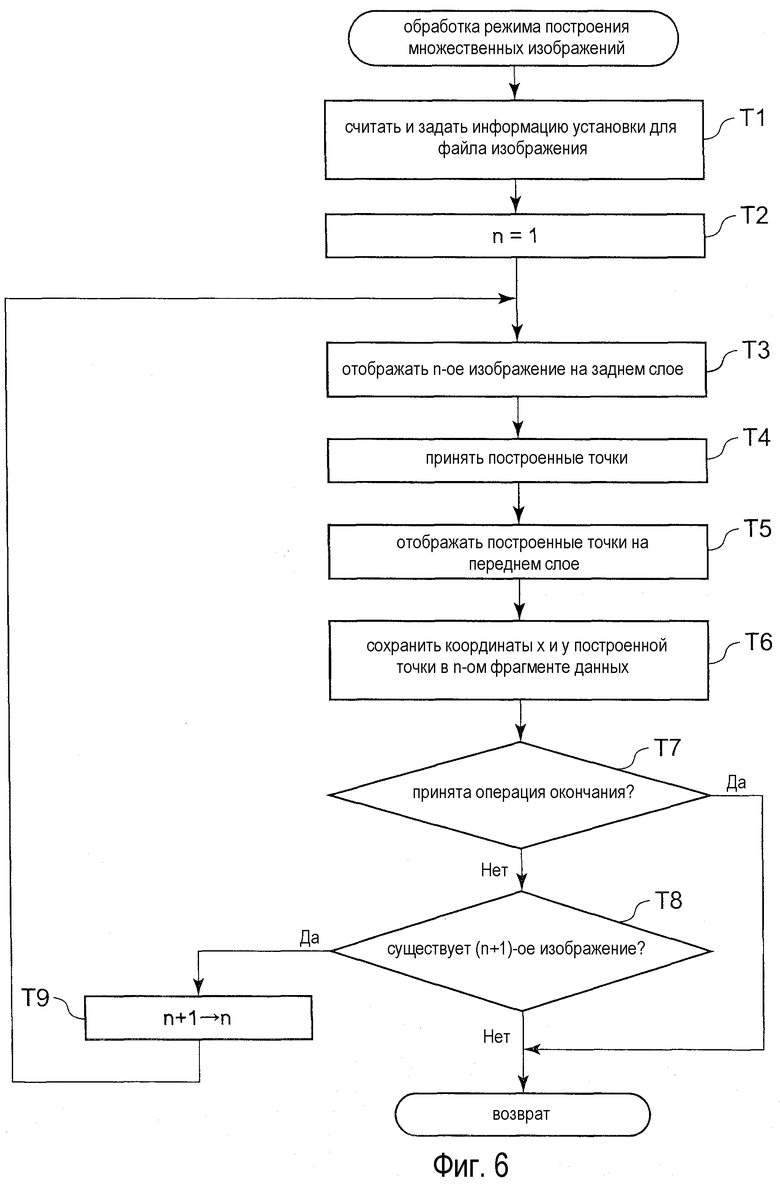
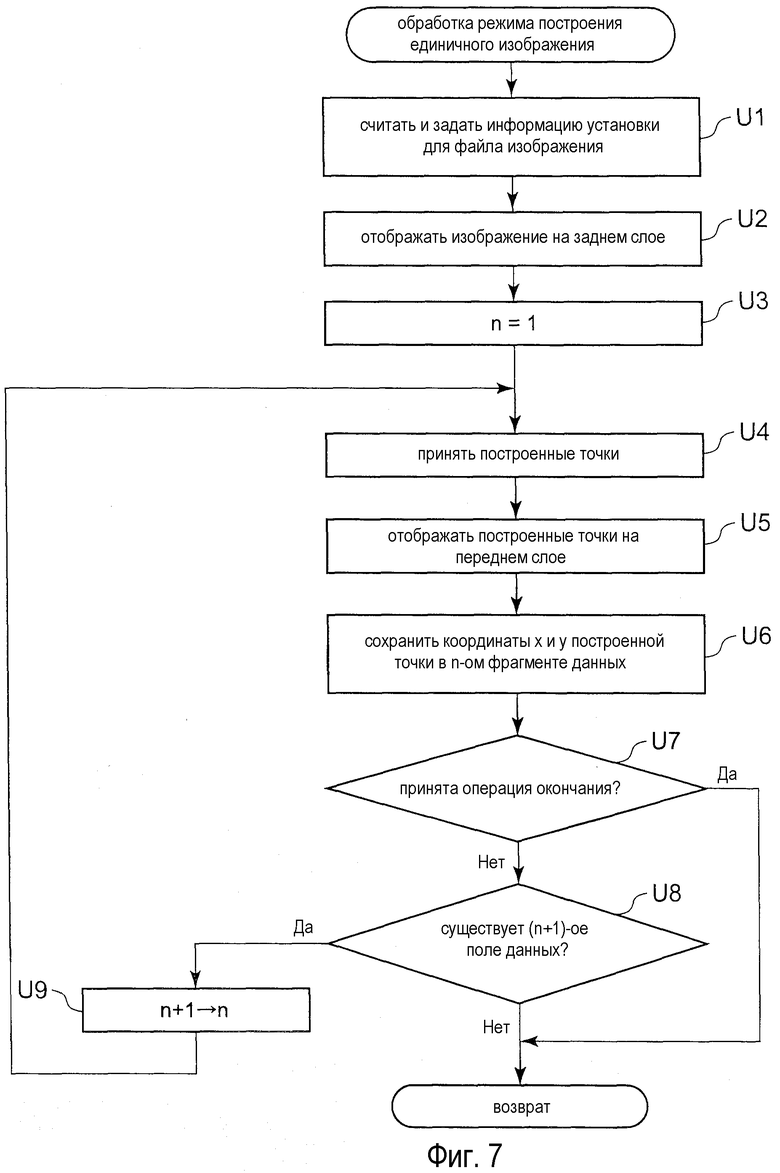
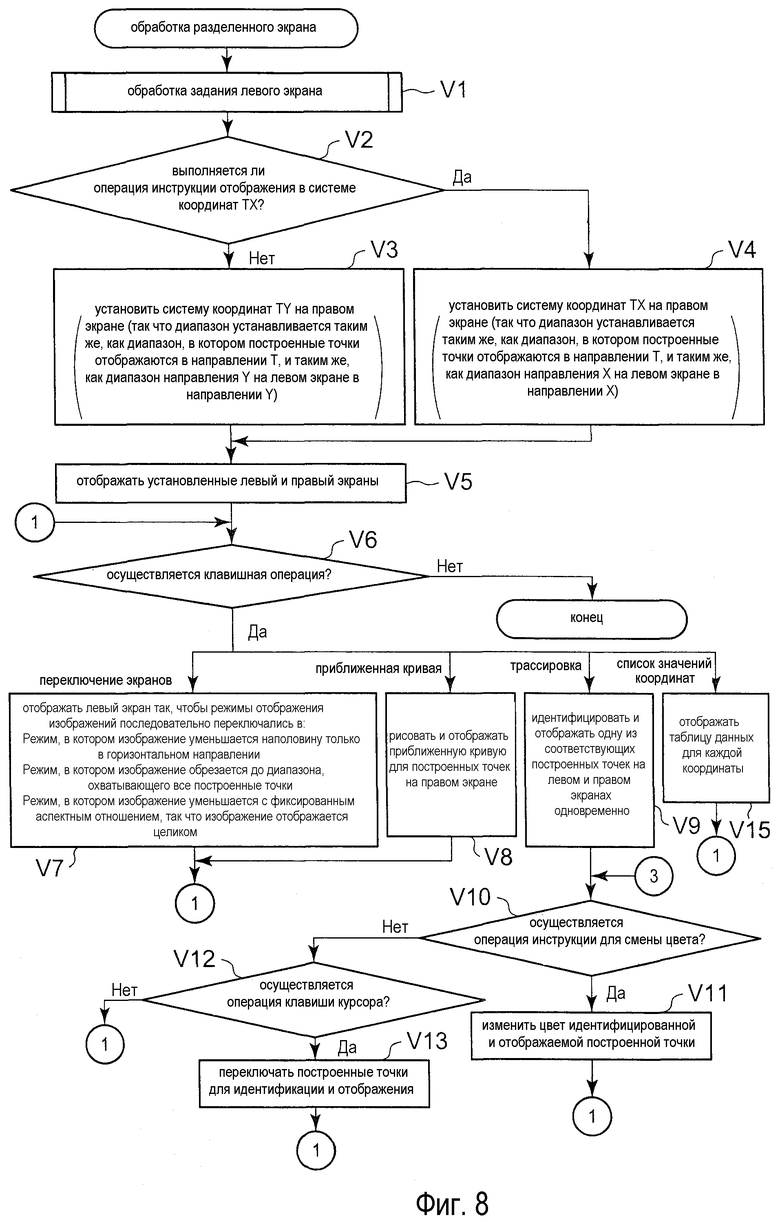
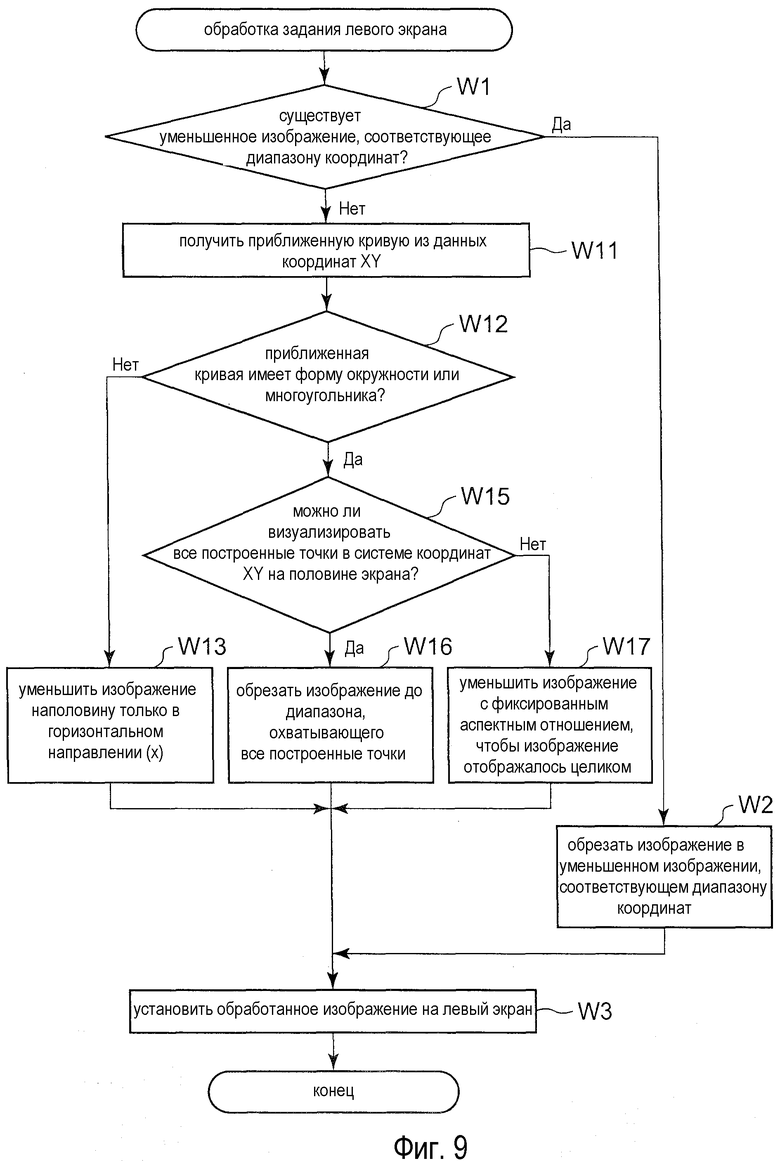
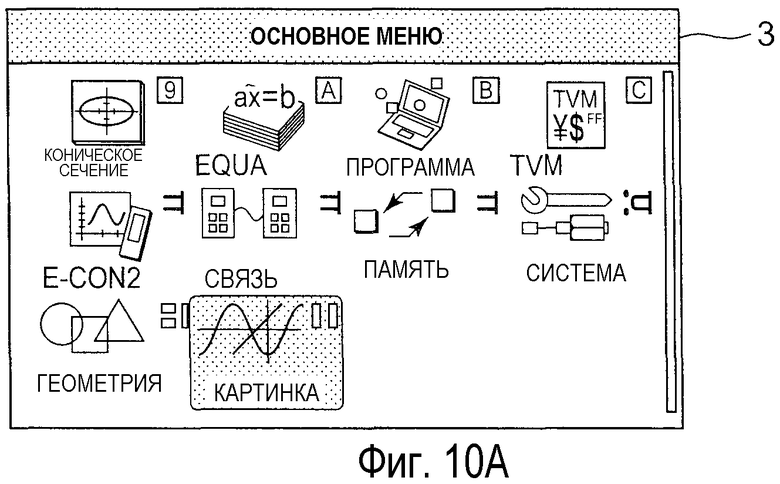
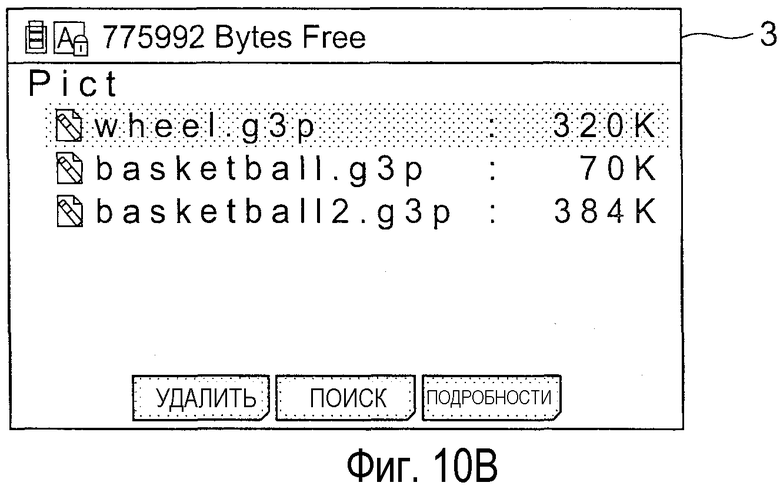
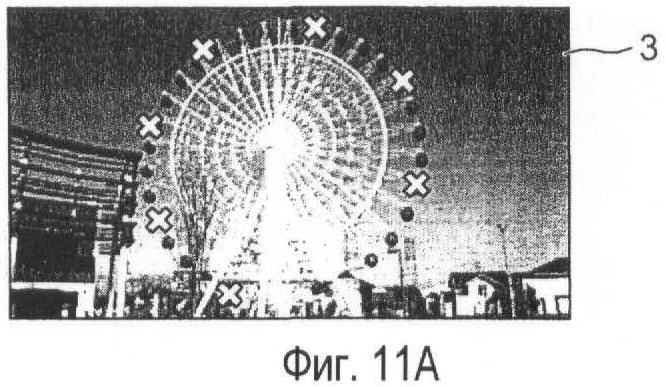
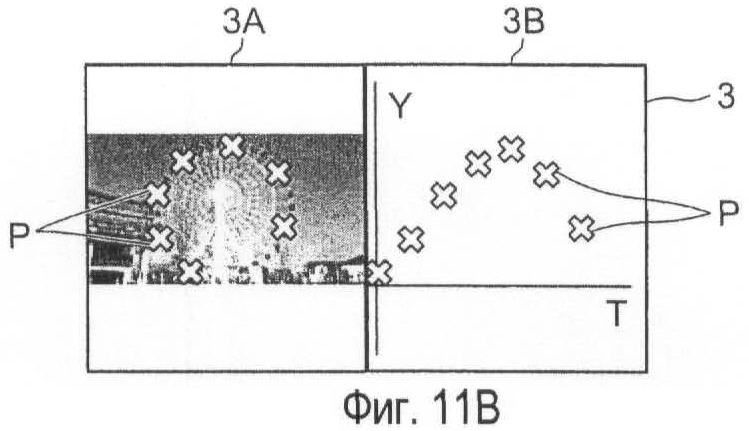
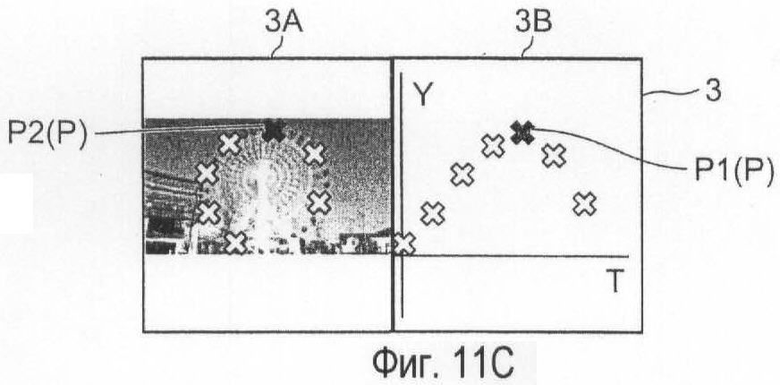
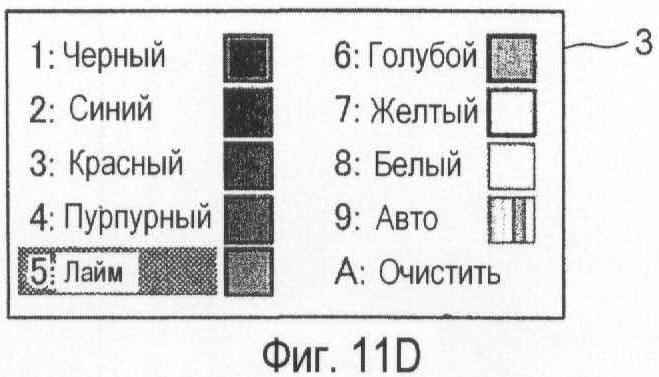
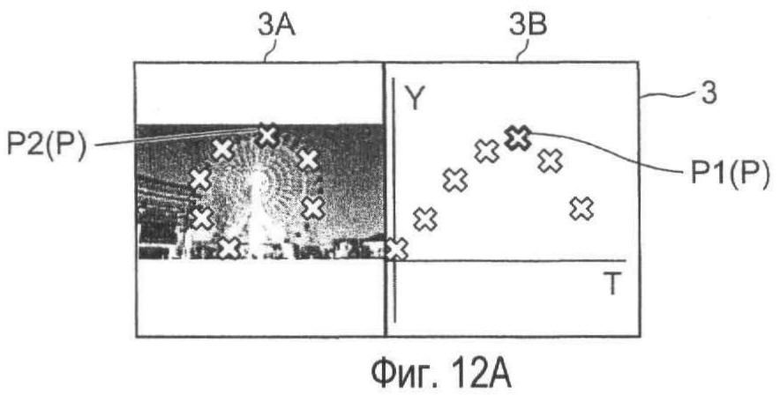
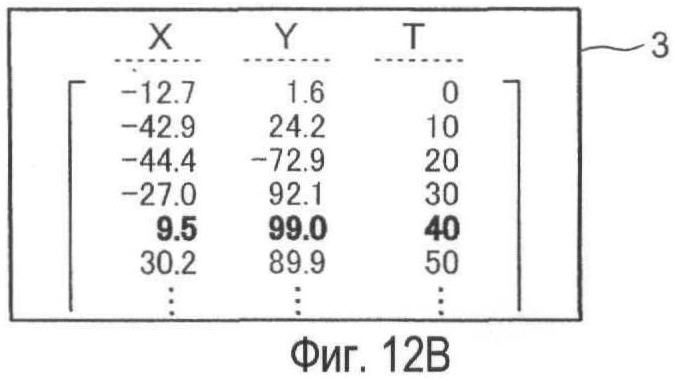
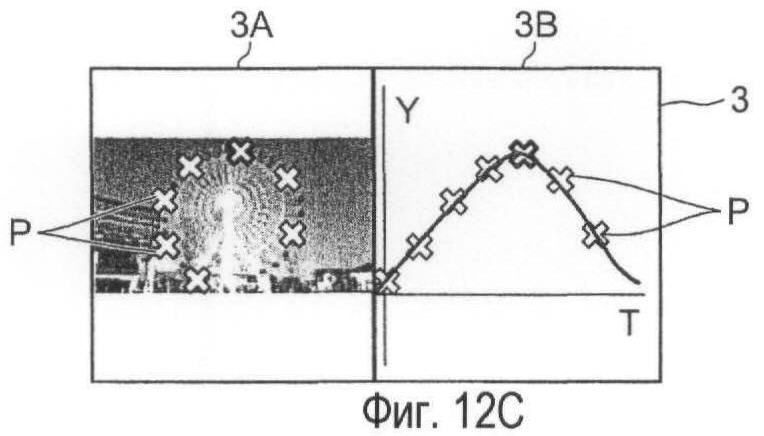
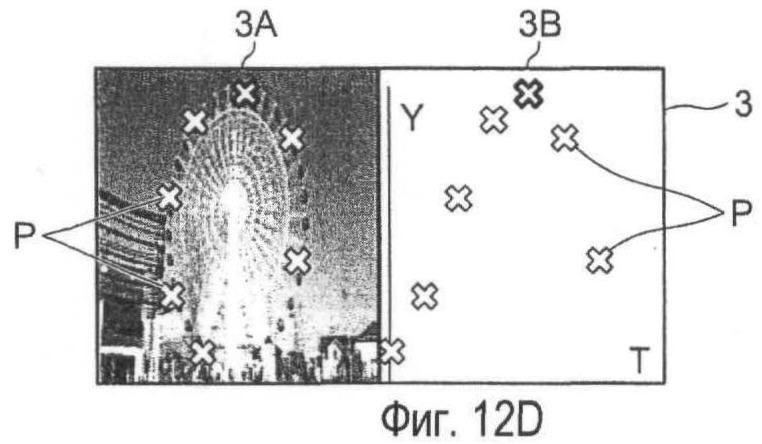
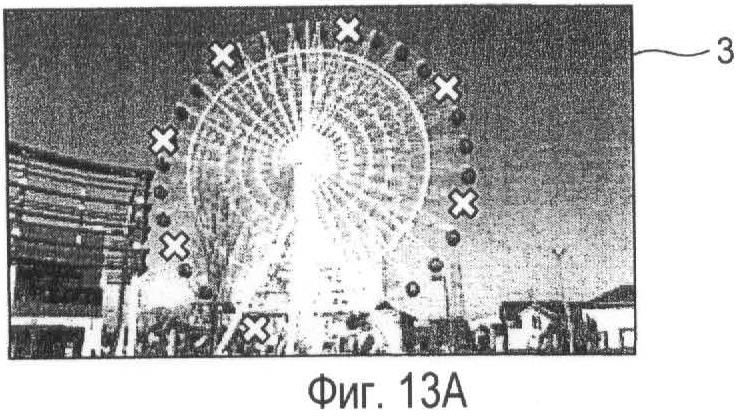
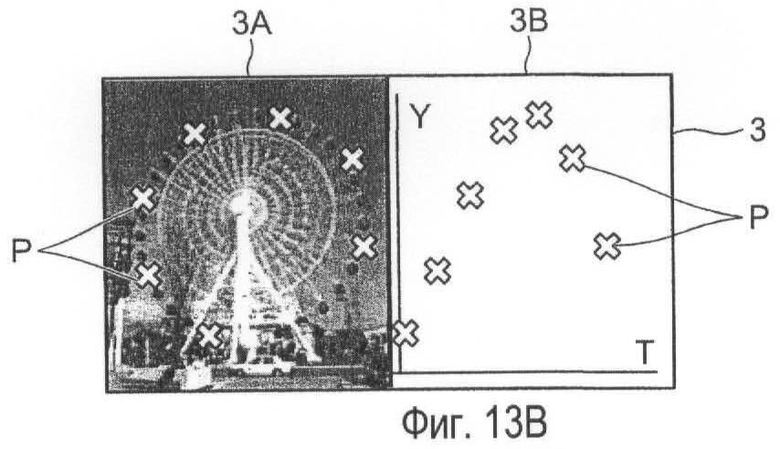
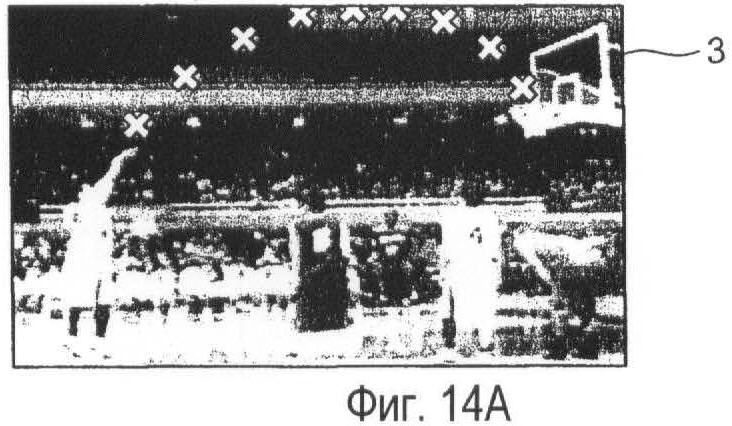
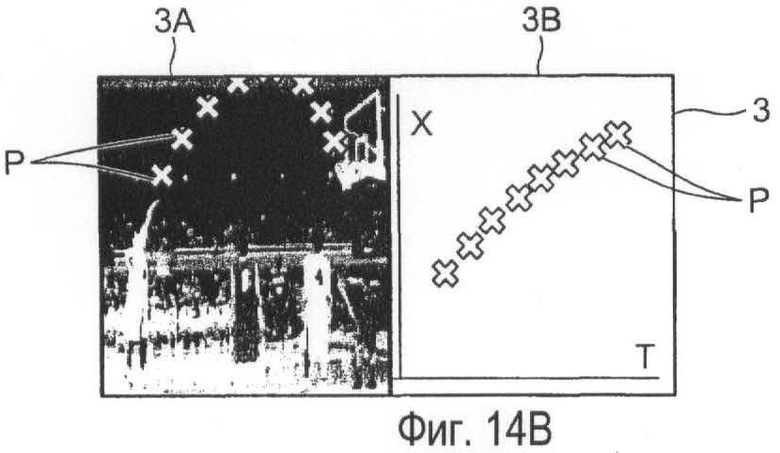
Изобретение относится к устройствам отображения. Техническим результатом является расширение функциональных возможностей устройства отображения и машиночитаемого носителя за счет обеспечения более высокого обучающего эффекта. Устройство отображения содержит: блок отображения, включающий в себя первую и вторую области отображения, который может устанавливать первую и вторую системы координат; память, в которой хранится файл изображения, включающий в себя данные изображения, данные диапазона координат и данные таблицы значений координат; и процессор, который осуществляет: обработку указания файлов изображения, указывающую файл изображения; обработку отображения, которая (i) считывает указанные данные, (ii) управляет отображением для части изображения из изображения данных указанного изображения, (iii) устанавливает первую систему координат в диапазоне, перекрывающем часть изображения, и (iv) управляет отображением построенных точек первой системы координат, причем данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и обработка отображения устанавливает вторую систему координат во второй области отображения и управляет отображением построенных точек. 3 н. и 14 з.п. ф-лы, 24 ил.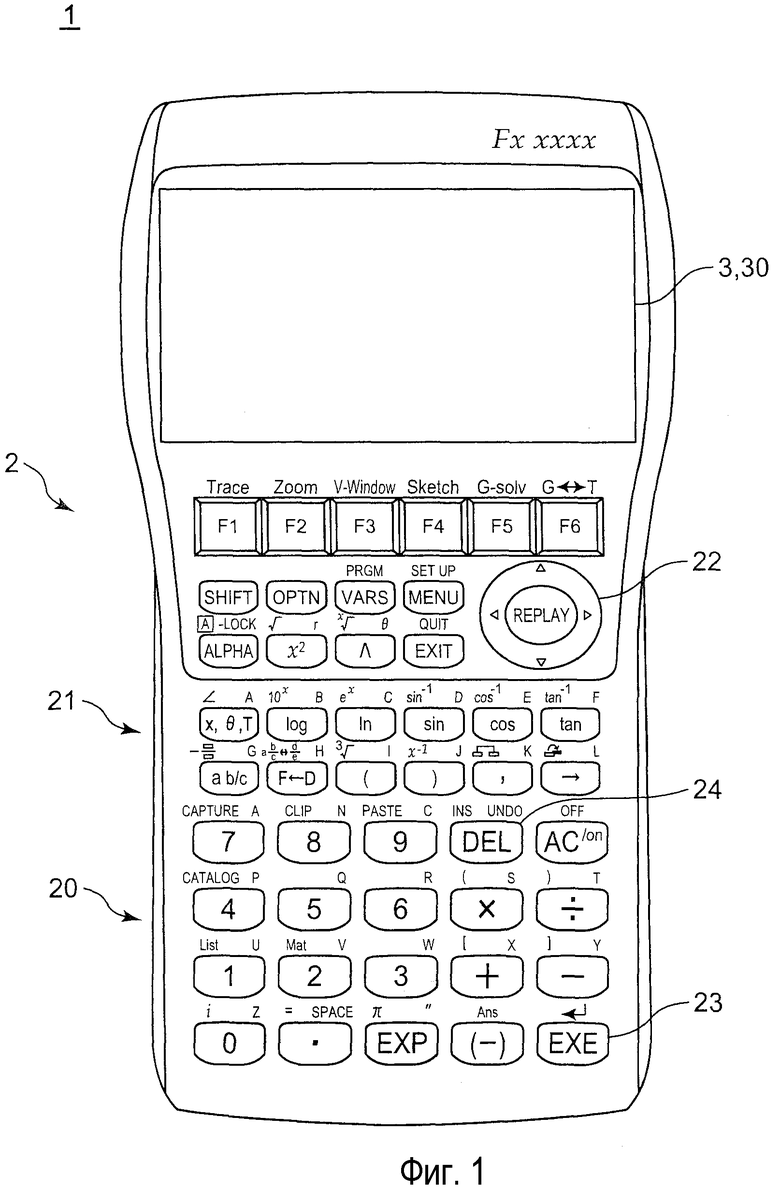
1. Устройство отображения, содержащее
блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси,
память, в которой хранится по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении, и
процессор, который осуществляет
обработку указания файлов изображения, которая указывает любой один из файлов изображения, хранящихся в памяти, как указанный файл изображения на основании пользовательской операции,
обработку отображения, которая (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве данных указанной таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения, в первой области отображения блока отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат в первой области отображения, и (iv) управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и при этом
обработка отображения устанавливает вторую систему координат во второй области отображения на основании данных указанной таблицы значений координат и управляет отображением построенных точек в каждой позиции, указанной данными указанной таблицы значений координат, среди каждой координатной позиции второй системы координат.
2. Устройство отображения по п.1, в котором процессор дополнительно осуществляет
обработку выбора построенной точки, которая выбирает любую из построенных точек, отображаемых в одном из первой области отображения и второй области отображения, в качестве выбранной построенной точки на основании пользовательской операции, и
обработку отображения идентификации построенной точки, которая обнаруживает в качестве соответствующей построенной точки построенную точку, имеющую значения координат, соответствующие значениям координат выбранной построенной точки, среди каждой из построенных точек, отображаемых в другой области отображения, и которая идентифицирует и отображает выбранную построенную точку и соответствующую построенную точку соответственно.
3. Устройство отображения по п.2, в котором процессор дополнительно осуществляет
обработку смены цвета, которая изменяет первый цвет отображения построенных точек, назначенных в качестве выбранной построенной точки и соответствующей построенной точки, и
обработку отображения значений координат, которая управляет отображением содержимого указанных данных таблицы значений координат на блоке отображения на основании пользовательской операции, причем
обработка отображения значений координат управляет отображением значений координат построенных точек для отображения во втором цвете отображения, измененном относительно первого цвета отображения посредством обработки смены цвета.
4. Устройство отображения по п.2, в котором упомянутая одна область отображения является второй областью отображения.
5. Устройство отображения по п.1, в котором обработка отображения, осуществляемая процессором, устанавливает вторую систему координат во второй области отображения, в результате чего в направлении оси третьей координатной оси во второй системе координат каждое значение координаты, указанное данными указанной таблицы значений координат, относящимися к третьей координатной оси, включается во вторую область отображения; и в направлении оси по меньшей мере одной из первой и второй координатных осей во второй системе координат верхнее предельное значение и нижнее предельное значение соответственно совпадают с верхним предельным значением и нижним предельным значением в направлении соответствующей оси в первой области отображения.
6. Устройство отображения по п.1, в котором
первая система координат является ортогональной системой координат, определяемой осью X и осью Y, и
вторая система координат является ортогональной системой координат, определяемой осью Т и по меньшей мере одной координатной осью, выбранной из оси X и оси Y в соответствии с пользовательской операцией.
7. Устройство отображения по п.1, в котором блок отображения включает в себя первую область отображения и вторую область отображения в разделенных областях, полученных разделением экрана дисплея в горизонтальном направлении или вертикальном направлении, и может переключать состояния отображения между состоянием разделенного отображения, в котором экран дисплея делится на первую область отображения и вторую область отображения, и состоянием полноэкранного отображения, когда отображение осуществляется без разделения экрана дисплея, в котором процессор дополнительно осуществляет
обработку полноэкранного отображения, которая (i) переводит блок отображения в состояние полноэкранного отображения, когда указанный файл изображения указан посредством обработки указания файлов изображения, (ii) отображает изображение данных указанного изображения на блоке отображения в полноэкранном режиме, (iii) устанавливает первую систему координат в диапазоне, указанном данными указанного диапазона координат на экране дисплея, и (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат, среди каждой координатной позиции первой системы координат,
обработку разделенного отображения, которая (i) переключает блок отображения из состояния отображения под управлением обработки полноэкранного отображения в состояние разделенного отображения в соответствии с пользовательской операцией, (ii) управляет отображением по меньшей мере части для части изображения в изображении данных указанного изображения для отображения в первой области отображения в размере, меньшем, чем размер отображения в состоянии полноэкранного отображения, (iii) устанавливает первую систему координат в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат в первой области отображения, (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат, (v) устанавливает вторую систему координат во второй области отображения на основании указанных данных таблицы значений координат и (vi) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции второй системы координат, и
обработку смены режима отображения, которая изменяет размер изображения данных указанного изображения, отображаемый в первой области отображения, в соответствии с пользовательской операцией, из состояния отображения под управлением обработки разделенного отображения, причем
обработка смены режима отображения управляет отображением изображения данных указанного изображения в первой области отображения в любом из размеров, выбранном посредством пользовательской операции, причем размеры включают в себя
первый размер отображения, при котором размер отображения для изображения в состоянии полноэкранного отображения уменьшается на заранее определенную величину в вертикальном направлении или горизонтальном направлении, в котором разделены первая область отображения и вторая область отображения, благодаря чему полное изображение данных указанного изображения может отображаться в первой области отображения,
второй размер отображения, при котором размер отображения для изображения в состоянии полноэкранного отображения уменьшается одинаково в вертикальном и горизонтальном направлениях, благодаря чему полное изображение данных указанного изображения может отображаться в первой области отображения, и
третий размер отображения, при котором изображение данных указанного изображения обрезается, чтобы оставлять только часть изображения, включающую в себя все целевые точки анализа, и
обработка смены режима отображения дополнительно устанавливает в первой области отображения первую систему координат в диапазоне, установленном для перекрытия части изображения, отображаемой в первой области отображения, на основании данных указанного диапазона координат, и управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат..
8. Устройство отображения по п.7, в котором обработка разделенного отображения, осуществляемая процессором, включает в себя
обработку вычисления приближенной кривой, которая вычисляет приближенную кривую для массы построенных точек в первой системе координат и которая определяет, имеет ли вычисленная приближенная кривая форму окружности или правильного многоугольника, и
обработку установки режима отображения, которая устанавливает размер изображения данных указанного изображения для отображения в первой области отображения на основании решения, принятого посредством обработки вычисления приближенной кривой, причем
обработка установки режима отображения устанавливает размер изображения данных указанного изображения для отображения в первой области отображения равным второму размеру отображения или третьему размеру отображения, когда принято решение, что приближенная кривая имеет форму окружности или правильного многоугольника посредством обработки вычисления приближенной кривой, и устанавливает размер изображения данных указанного изображения для отображения в первой области отображения равным первому размеру отображения, когда принято решение, что приближенная кривая не имеет формы окружности и правильного многоугольника посредством обработки вычисления приближенной кривой.
9. Машиночитаемый носитель, на котором хранится программа, включающая в себя последовательность инструкций, побуждающих компьютер выполнять обработку, причем компьютер содержит: блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси, и память, где хранятся по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении, и обработка включает в себя
инструкцию указания файлов изображения, которая указывает любой из файлов изображения, хранящихся в памяти, как указанный файл изображения на основании пользовательской операции,
инструкцию отображения, которая (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве указанных данных таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения в первой области отображения блока отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат, в первой области отображения и (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат и
инструкция отображения устанавливает вторую систему координат во второй области отображения на основании указанных данных таблицы значений координат и управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции второй системы координат.
10. Устройство отображения, содержащее
блок отображения, который включает в себя первую область отображения и вторую область отображения, который может задавать для первой области отображения первую систему координат, определяемую первой координатной осью и второй координатной осью, и который может задавать для второй области отображения вторую систему координат, определяемую третьей координатной осью и по меньшей мере одной из первой координатной оси и второй координатной оси,
блок хранения файлов изображения, в котором хранится по меньшей мере один файл изображения, включающий в себя данные изображения, данные диапазона координат, указывающие диапазон первой системы координат, установленный так, чтобы перекрывать изображение данных изображения, и данные таблицы значений координат, указывающие значения координат в первой системе координат для каждой из целевых точек анализа, ранее установленных в изображении,
блок указания файлов изображения, который указывает любой из файлов изображения, хранящихся в блоке хранения файлов изображения, как указанный файл изображения на основании пользовательской операции,
блок управления отображением, который (i) считывает из указанного файла изображения данные изображения в качестве данных указанного изображения, данные диапазона координат в качестве данных указанного диапазона координат и данные таблицы значений координат в качестве указанных данных таблицы значений координат, (ii) управляет отображением по меньшей мере части для части изображения из изображения данных указанного изображения в первой области отображения, (iii) устанавливает первую систему координат, которая находится в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат, в первой области отображения и (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат, причем
данные таблицы значений координат коррелируют значение координаты третьей координатной оси со значениями координат в первой системе координат, и
блок управления отображением устанавливает вторую систему координат во второй области отображения на основании указанных данных таблицы значений координат и управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции второй системы координат.
11. Устройство отображения по п.10, дополнительно содержащее
блок выбора построенной точки, который выбирает любую из построенных точек, отображаемых в одной из первой области отображения и второй области отображения, в качестве выбранной построенной точки на основании пользовательской операции, и
блок отображения идентификации построенной точки, который обнаруживает, в качестве соответствующей построенной точки, построенную точку, имеющую значения координат, соответствующие значениям координат выбранной построенной точки, среди каждой из построенных точек, отображаемых в другой области отображения, и который идентифицирует и отображает выбранную построенную точку и соответствующую построенную точку соответственно.
12. Устройство отображения по п.11, дополнительно содержащее
блок смены цвета отображения построения, который изменяет первый цвет отображения построенных точек, назначенный выбранной построенной точке и соответствующей построенной точке, и
блок управления отображением значений координат, который управляет отображением содержимого указанных данных таблицы значений координат на блоке отображения на основании пользовательской операции, причем
блок управления отображением значений координат управляет отображением значений координат построенных точек для отображения во втором цвете отображения, измененном относительно первого цвета отображения блоком смены цвета отображения построения.
13. Устройство отображения по п.11, в котором упомянутая одна область отображения является второй областью отображения.
14. Устройство отображения по п.10, в котором блок управления отображением устанавливает вторую систему координат во второй области отображения, в результате чего в направлении оси третьей координатной оси во второй системе координат каждое значение координаты, указанное указанными данными таблицы значений координат, относящимися к третьей координатной оси, включается во вторую область отображения, и в направлении оси по меньшей мере одной из первой и второй координатных осей во второй системе координат верхнее предельное значение и нижнее предельное значение соответственно совпадают с верхним предельным значением и нижним предельным значением в направлении соответствующей оси в первой области отображения.
15. Устройство отображения по п.10, в котором
первая система координат является ортогональной системой координат, определяемой осью X и осью Y, и
вторая система координат является ортогональной системой координат, определяемой осью Т и по меньшей мере одной координатной осью, выбранной из оси X и оси Y в соответствии с пользовательской операцией.
16. Устройство отображения по п.10, в котором блок отображения включает в себя первую область отображения и вторую область отображения в разделенных областях, полученных разделением экрана дисплея в горизонтальном направлении или вертикальном направлении, и может переключать состояния отображения между состоянием разделенного отображения, в котором экран дисплея делится на первую область отображения и вторую область отображения, и состоянием полноэкранного отображения, когда отображение осуществляется без разделения экрана дисплея, причем блок управления отображением включает в себя
блок управления полноэкранным отображением, который (i) переводит блок отображения в состояние полноэкранного отображения, когда указанный файл изображения указан блоком указания файлов изображения, (ii) отображает изображение данных указанного изображения на блоке отображения в полноэкранном режиме, (iii) устанавливает первую систему координат в диапазоне, указанном данными указанного диапазона координат на экране дисплея, и (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат,
блок управления разделенным отображением, который (i) переключает блок отображения из состояния отображения под управлением блока управления полноэкранным отображением в состояние разделенного отображения в соответствии с пользовательской операцией, (ii) управляет отображением по меньшей мере части для части изображения в изображении данных указанного изображения для отображения в первой области отображения в размере, меньшем, чем размер отображения в состоянии полноэкранного отображения, (iii) устанавливает первую систему координат в диапазоне, установленном для перекрытия части изображения в данных указанного диапазона координат в первой области отображения, (iv) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат, (v) устанавливает вторую систему координат во второй области отображения на основании указанных данных таблицы значений координат и (vi) управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции второй системы координат, и
блок смены режима отображения, который изменяет размер изображения данных указанного изображения, отображаемый в первой области отображения, в соответствии с пользовательской операцией, из состояния отображения под управлением блока управления разделенным отображением, причем
блок смены режима отображения управляет отображением изображения данных указанного изображения в первой области отображения в любом одном из размеров, выбранном посредством пользовательской операции, причем размеры включают в себя
первый размер отображения, при котором размер отображения для изображения в состоянии полноэкранного отображения уменьшается на заранее определенную величину в вертикальном направлении или горизонтальном направлении, в котором разделены первая область отображения и вторая область отображения, благодаря чему полное изображение данных указанного изображения может отображаться в первой области отображения,
второй размер отображения, при котором размер отображения для изображения в состоянии полноэкранного отображения уменьшается одинаково в вертикальном и горизонтальном направлениях, благодаря чему полное изображение данных указанного изображения может отображаться в первой области отображения, и
третий размер отображения, при котором изображение данных указанного изображения обрезается, чтобы оставлять только часть изображения, включающую в себя все целевые точки анализа, и
блок смены режима отображения дополнительно устанавливает в первой области отображения первую систему координат в диапазоне, установленном для перекрытия части изображения, отображаемой в первой области отображения, на основании данных указанного диапазона координат, и управляет отображением построенных точек в каждой позиции, указанной указанными данными таблицы значений координат среди каждой координатной позиции первой системы координат.
17. Устройство отображения по п.16, в котором блок управления разделенным отображением включает в себя
блок вычисления приближенной кривой, который вычисляет приближенную кривую для массы построенных точек в первой системе координат и который определяет, имеет ли вычисленная приближенная кривая форму окружности или правильного многоугольника, и
блок установки режима отображения, который устанавливает размер изображения данных указанного изображения для отображения в первой области отображения на основании решения, принятого блоком вычисления приближенной кривой, причем
блок установки режима отображения устанавливает размер изображения данных указанного изображения для отображения в первой области отображения равным второму размеру отображения или третьему размеру отображения, когда блоком вычисления приближенной кривой принято решение, что приближенная кривая имеет форму окружности или правильного многоугольника, и устанавливает размер изображения данных указанного изображения для отображения в первой области отображения равным первому размеру отображения, когда блоком вычисления приближенной кривой принято решение, что приближенная кривая не имеет формы окружности и правильного многоугольника.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Устройство для регулирования крутящего момента гайковерта | 1983 |
|
SU1125608A1 |
| Зажим для сборки | 1975 |
|
SU585944A1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ДЛЯ УДОСТОВЕРЕНИЯ ПОДЛИННОСТИ ЭЛЕКТРОННЫХ СДЕЛОК И ЭЛЕКТРОННЫХ ПЕРЕДАЧ БЕЗ ИСПОЛЬЗОВАНИЯ ИДЕНТИФИКАЦИОННЫХ КАРТОЧЕК | 1996 |
|
RU2263348C2 |
| Сплавной лот для плотов, барж и т.п. | 1928 |
|
SU13524A1 |

