Изобретение относится к области неразрушающего контроля и может быть использовано для неразрушающего контроля труднодоступных элементов конструкции из немагнитных материалов, например: из полимерных композиционных материалов (угле-, стекло-, органопластиков и других) в авиационной, судостроительной и других отраслях машиностроения.
Известно устройство для неразрушающего контроля радиусных зон элементов конструкций, включающее две вертикальные стрелы, выполненные из алюминиевого профиля и соединенные между собой, поворотные держатели и акриловые «пальцы» для фиксирования преобразователей. Поворотные держатели устанавливают на определенный угол и фиксируют относительно вертикальных стрел, акриловые «пальцы» с преобразователями не фиксируют. Перемещение устройства вдоль объекта контроля осуществляется роботизированной установкой (Патент США №6658939).
Недостатками известного устройства является то, что для его применения необходим открытый доступ к контролируемой поверхности и, следовательно, проведение контроля в труднодоступных местах становится невозможным. Устройство не позволяет контролировать конструкции переменного по длине сечения, а также стенки и ребра элементов конструкции. При контроле используется контактная жидкость, что также накладывает ряд ограничений на использование устройства. При использовании известного устройства контроль возможен только при угле наклона контролируемого элемента к обшивке равном 90°.
Также известно устройство для контроля ПКМ, включающее в себя два датчика - ведущий и ведомый, каждый из которых состоит из корпуса в форме параллелепипеда, как минимум двух магнитов для позиционирования датчиков друг относительно друга, преобразователя (или чувствительного элемента преобразователя), отверстия для подачи контактной жидкости и колес для перемещения. Ведущий датчик содержит рукоятку для обеспечения возможности присоединения к нему штанги при контроле длинномерных конструкций. При контроле может использоваться как сухой, так и жидкостный контакт (Патент США №6722202).
Недостатками известного устройства является то, что оно не позволяет контролировать радиусные зоны элементов конструкций, внутренние стенки и ребра элементов конструкций с ограниченным доступом, так как нет возможности выбора высоты линии сканирования.
Известно устройство для ультразвукового контроля теневым методом наклонными лучами с возбуждением поперечной волны, включающее два датчика - ведущий и ведомый, каждый из которых состоит из опоры и наклонного преобразователя. Опора обеспечивает крепление и позиционирование преобразователей, а также ввод ультразвуковых волн в объект контроля. К ведущему датчику крепится устройство для обеспечения магнитного сцепления с ведомым, а также для обеспечения и поддержания требуемого смещения датчиков друг относительно друга. При необходимости к опорам могут крепиться вычислительные устройства, включающие процессорный элемент и WiFi приемник (передатчик). К опоре ведущего датчика может подсоединяться дисплей для отображения данных контроля в реальном времени и устройство для автоматического перемещения. В качестве контактной жидкости при контроле используется ультразвуковой гель или вода, а в некоторых случаях специальная смазывающая жидкость (Патент США №7240556).
Недостатком известного устройства является невозможность проведения контроля в труднодоступных местах и невозможность контроля радиусных зон элементов конструкций из-за его габаритов. Также недостатком является использование контактной жидкости и необходимость ее подачи в зону контроля, что не всегда является возможным. Из-за конструктивных особенностей объекта контроля и в частности поверхности ввода ультразвуковых волн возможно заедание ведомого преобразователя, т.е. движение рывками, что негативным образом скажется на результатах контроля.
Наиболее близким аналогом, взятым за прототип, является устройство для неразрушающего контроля труднодоступных элементов конструкции, включающее приводной блок, имеющий, по крайней мере, один магнит, расположенный на первой поверхности конструкции, первый контролирующий блок, имеющий первый чувствительный элемент и, по крайней мере, один магнит и второй контролирующий блок, имеющий второй чувствительный элемент и, по крайней мере, один магнит, которые размещены на второй поверхности конструкции противоположной первой, при этом труднодоступный элемент контролируемой конструкции находится между первым и вторым контролирующими блоками, а первый и второй контролирующие блоки связаны при помощи магнитов с приводным блоком так, чтобы движение приводного блока перемещало первый и второй контролирующие блоки совместно с приводным блоком без непосредственного контакта, при этом первый и второй контролирующие блоки находятся в фиксированном положении друг относительно друга и не соединены друг с другом, а чувствительные элементы жестко закреплены на них (Патент США №7231826).
Недостатками устройства является то, что оно не позволяет проводить контроль радиусных зон, конструкций переменного по длине сечения, а также нет возможности выбора высоты линии сканирования.
Технической задачей изобретения является создание устройства, позволяющего проводить неразрушающий контроль реберных конструкций переменного по длине сечения и при углах наклона контролируемого элемента к наружной поверхности конструкции не менее 30° с возможностью выбора высоты линии сканирования и проведения контроля радиусных зон.
Для решения поставленной задачи предложено устройство для неразрушающего контроля труднодоступных элементов конструкции, включающее приводной блок, имеющий, по крайней мере, один магнит, расположенный на внешней поверхности конструкции, первый контролирующий блок, имеющий первый чувствительный элемент и, по крайней мере, один магнит и второй контролирующий блок, имеющий второй чувствительный элемент и, по крайней мере, один магнит, которые размещены на внутренней поверхности конструкции, при этом труднодоступный элемент контролируемой конструкции находится между первым и вторым контролирующими блоками, а первый и второй контролирующие блоки связаны при помощи магнитов с приводным блоком так, чтобы движение приводного блока перемещало первый и второй контролирующие блоки совместно с приводным блоком без непосредственного контакта, в котором контролирующие блоки связаны между собой при помощи дополнительных магнитов, расположенных симметрично на каждом контролирующем блоке, а чувствительные элементы соединены с контролирующими блоками посредством поворотной платформы, подпружиненной кулисы и металлической скобы, имеющей две степени свободы для корректировки положения чувствительных элементов по выбранной линии сканирования, и расположенной на конце подпружиненной кулисы.
Изобретение поясняется чертежами.
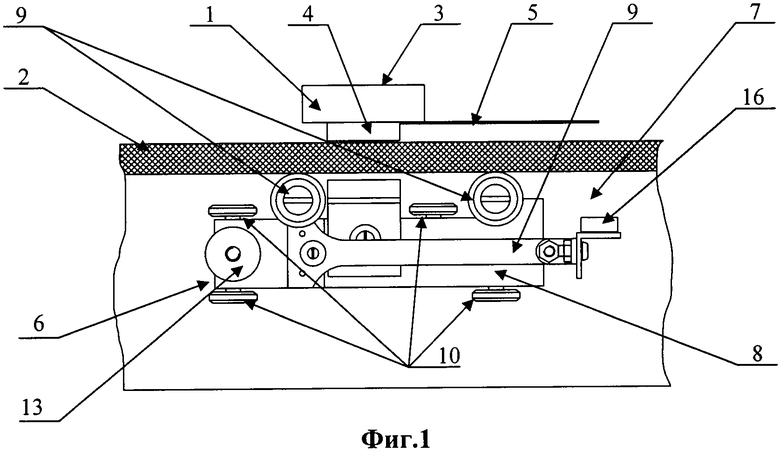
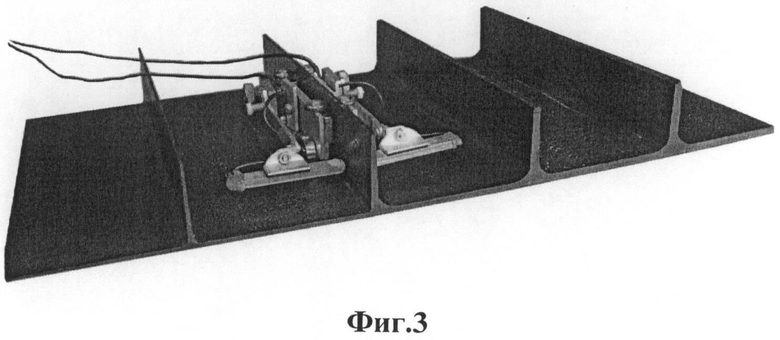
Устройство для неразрушающего контроля труднодоступных элементов конструкции представлено на Фиг.1 (вид сбоку) и на Фиг.2 (вид со стороны труднодоступного элемента конструкции).
Устройство содержит приводной блок 1, расположенный на внешней поверхности конструкции 2, включающий металлическую пластину 3 для размещения магнитов 4 и стрелочного указателя перемещения 5, и два контролирующих блока 6, расположенных на внутренней поверхности конструкции 2 с двух сторон труднодоступного элемента 7, включающие металлическую пластину 8, на которой горизонтально расположены два колеса 9 и вертикально четыре колеса 10, три магнита 11, один из которых расположен на торцевой поверхности пластины между горизонтальным и вертикальным колесом, а два других под металлической пластиной, поворотную платформу 12 с подпружиненной кулисой 14, на конце которой крепится металлическая скоба 15, выполненная с возможностью поворота чувствительного элемента 16.
Устройство работает следующим образом:
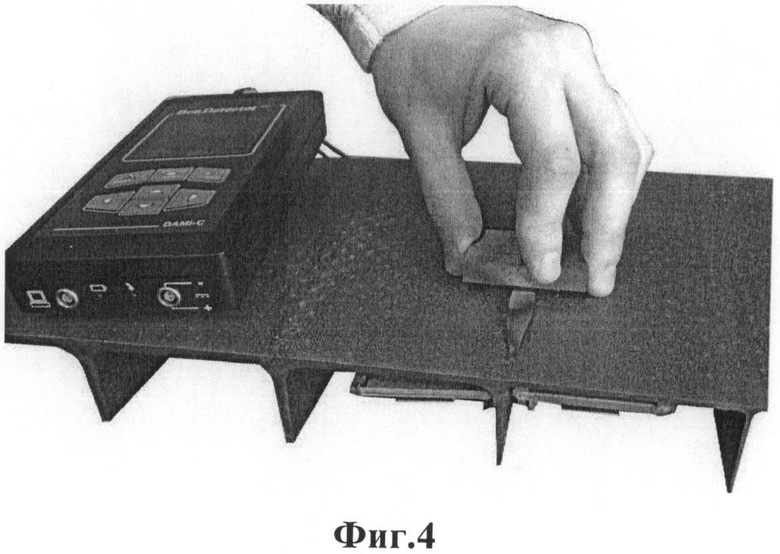
Чувствительные элементы (преобразователи) 16 требуемой частоты прикрепляют к металлическим скобам 15, выполненным с возможностью их поворота совместно с чувствительным элементом на концах подпружиненных кулис 14 в контролирующих блоках 6 устройства. Чувствительные элементы при помощи коаксиальных кабелей подключают к дефектоскопу. После настройки дефектоскопа контролирующие блоки 6 устанавливают на внутренней поверхности конструкции 2 с двух сторон труднодоступного элемента 7, а приводной блок 1 устанавливают на внешней поверхности конструкции 2 (Фиг.3, Фиг.4). Затем выбирают линию сканирования и при помощи поворотных платформ 12 устанавливают чувствительные элементы 16 на этой линии и закрепляют положение фиксирующими винтами 13. Поворотом металлических скоб 15 обеспечивают соосное положение чувствительных элементов 16 с двух сторон труднодоступного элемента 7 контролируемой конструкции 2 и фиксируют это положение. Оператор вручную перемещает приводной блок 1 по внешней поверхности конструкции 2 в направлении стрелочного указателя перемещения 5, осуществляя сканирование. Благодаря тому, что контролирующие блоки 6 при помощи магнитов 11 жестко соединены друг с другом и с приводным блоком 1, устройство перемещается как единое целое. При этом магниты, расположенные под металлической пластиной 8 первого контролирующего блока взаимодействуют с магнитами, расположенными симметрично под металлической пластиной 8 второго контролирующего блока, а магнит, расположенный на торцевой поверхности между горизонтальным и вертикальным колесом каждого контролирующего блока взаимодействует с магнитами 4 приводного блока 1. Дефекты типа расслоений и непроклеев в труднодоступном элементе 7 контролируемой конструкции 2 изменяют параметры принимаемых ультразвуковых сигналов, и срабатывает автоматическая сигнализация дефектоскопа, по которой оператор узнает о наличии дефекта.
Неразрушающий контроль реберных конструкций переменного по длине сечения и при углах наклона ребра к внешней поверхности конструкции не менее 30° возможен благодаря тому, что контролирующие блоки связаны между собой при помощи дополнительных магнитов, расположенных симметрично на каждом контролирующем блоке. При этом как бы не менялось сечение контролируемого ребра и угол его наклона по отношению к наружной поверхности, контролирующие блоки будут всегда находиться на поверхности ребра без смещения друг относительно друга и отрыва от поверхности, что в свою очередь не приведет к смещению или отрыву чувствительных элементов от контролируемой поверхности.
Выбор линии сканирования возможен благодаря введению в устройство поворотной платформы с подпружиненной кулисой и металлической скобой, что позволяет перемещать чувствительные элементы блоков контроля в плоскости параллельной плоскости контролируемого элемента.
Контроль радиусных зон стал возможен благодаря тому, что чувствительные элементы блоков контроля крепятся к металлической скобе, выполненной с возможностью поворота. Металлическая скоба имеет две степени свободы, что позволяет производить корректировку положения чувствительных элементов по выбранной линии сканирования и фиксировать это положение независимо от положения поворотной платформы.
Таким образом, устройство может быть использовано для неразрушающего контроля реберных конструкций из немагнитных материалов, например: из полимерных композиционных материалов (угле-, стекло-, органопластиков и других) в труднодоступных местах, в том числе переменного по длине сечения и углах наклона контролируемого элемента к наружной поверхности конструкции не менее 30° в авиационной, судостроительной и других отраслях машиностроения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сканирующее устройство | 1989 |
|
SU1640633A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗБЫТОЧНОЙ КОРРОЗИИ СТАЛИ | 2015 |
|
RU2570704C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ КОЛЁСНЫХ ПАР ВАГОНОВ | 2020 |
|
RU2744644C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРА РЕЖИМОВ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИЕЙ АВТОМОБИЛЯ | 2012 |
|
RU2491459C1 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ ФЕРРОМАГНИТНОЙ ФАЗЫ АУСТЕНИТНЫХ СТАЛЕЙ | 1999 |
|
RU2166191C2 |
| Устройство для дефектоскопии внутренней поверхности труб | 1987 |
|
SU1578628A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛАКСАЦИОННОЙ КОЭРЦИТИВНОЙ СИЛЫ И РЕЛАКСАЦИОННОЙ НАМАГНИЧЕННОСТИ ПРОТЯЖЕННЫХ ИЗДЕЛИЙ ИЗ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ | 2016 |
|
RU2627122C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
Использование: для неразрушающего контроля труднодоступных элементов конструкции. Сущность: заключается в том, что устройство для неразрушающего контроля труднодоступных элементов конструкции включает приводной блок, имеющий, по крайней мере, один магнит, расположенный на внешней поверхности конструкции, первый контролирующий блок, имеющий первый чувствительный элемент и, по крайней мере, один магнит и второй контролирующий блок, имеющий второй чувствительный элемент и, по крайней мере, один магнит, которые размещены на внутренней поверхности конструкции, при этом труднодоступный элемент контролируемой конструкции находится между первым и вторым контролирующими блоками, а первый и второй контролирующие блоки связаны при помощи магнитов с приводным блоком так, чтобы движение приводного блока перемещало первый и второй контролирующие блоки совместно с приводным блоком без непосредственного контакта, при этом контролирующие блоки связаны между собой при помощи дополнительных магнитов, расположенных симметрично на каждом контролирующем блоке, а чувствительные элементы соединены с контролирующими блоками посредством поворотной платформы, подпружиненной кулисы и металлической скобы, имеющей две степени свободы для корректировки положения чувствительных элементов по выбранной линии сканирования, и расположенной на конце подпружиненной кулисы. Технический результат: обеспечение возможности проводить неразрушающий контроль реберных конструкций переменного по длине сечения и при углах наклона контролируемого элемента к наружной поверхности конструкции не менее 30° с возможностью выбора высоты линии сканирования и проведения контроля радиусных зон. 4 ил.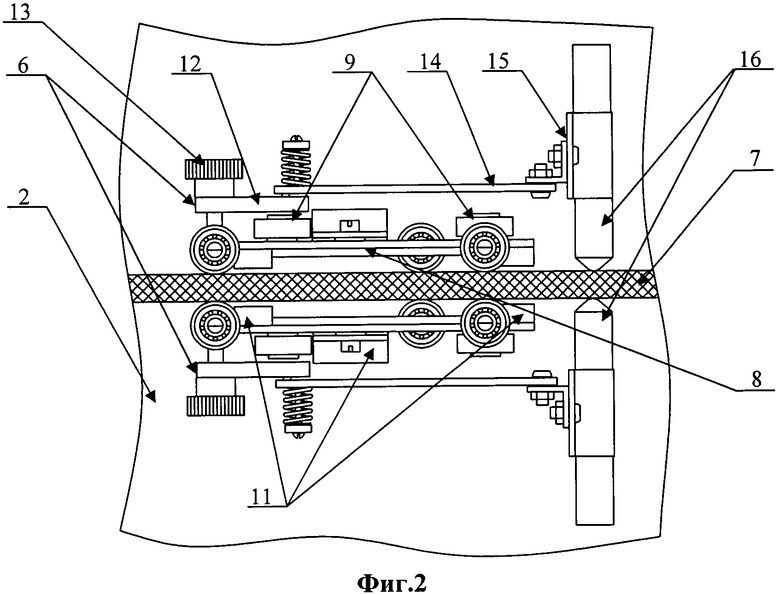
Устройство для неразрушающего контроля труднодоступных элементов конструкции, включающее приводной блок, имеющий, по крайней мере, один магнит, расположенный на внешней поверхности конструкции, первый контролирующий блок, имеющий первый чувствительный элемент и, по крайней мере, один магнит и второй контролирующий блок, имеющий второй чувствительный элемент и, по крайней мере, один магнит, которые размещены на внутренней поверхности конструкции, при этом труднодоступный элемент контролируемой конструкции находится между первым и вторым контролирующими блоками, а первый и второй контролирующие блоки связаны при помощи магнитов с приводным блоком так, чтобы движение приводного блока перемещало первый и второй контролирующие блоки совместно с приводным блоком без непосредственного контакта, отличающееся тем, что контролирующие блоки связаны между собой при помощи дополнительных магнитов, расположенных симметрично на каждом контролирующем блоке, а чувствительные элементы соединены с контролирующими блоками посредством поворотной платформы, подпружиненной кулисы и металлической скобы, имеющей две степени свободы для корректировки положения чувствительных элементов по выбранной линии сканирования, и расположенной на конце подпружиненной кулисы.
| US 7231826 B2, 19.06.2007 | |||
| US 7240556 B2, 10.07.2007 | |||
| WO 2010010317 A1, 28.01.2010 | |||
| US 4848159 A, 18.07.1989 | |||
| Способ ультразвуковой дефектоскопии изделий из композиционных материалов и устройство для его осуществления | 1986 |
|
SU1404930A1 |
| Способ ультразвукового контроля пера подошвы железнодорожных рельсов | 1989 |
|
SU1732260A1 |

