Изобретение относится к устройству, а также к способу загрузки и ввода труб в трубогибочные машины, в которых подлежащие гибки трубы в месте гибки подвергаются индуктивному нагреву. При этом в случае труб речь идет о толстостенных стальных трубах с толщиной стенок от 3 до 120 мм и с большим диаметром от 400 до 1660 мм и при этом весом в несколько тонн. Соответственно, большими и тяжелыми являются также созданные для них трубогибочные машины, с помощью которых реализуются трубы с радиусом гибки от 1 до 10 м.
При этом проблемной является манипуляция изогнутыми трубами. Для каждого изгиба сгибаемая труба своим прямым концом должна быть зажата в подающей тележке, в то время как на сгибаемом конце крепится гибочный фиксатор. Между гибочным фиксатором и подающей тележкой находится кольцеобразное устройство для индуктивного нагрева, обычно именуемое также индуктивным кольцом. Это индуктивное кольцо во время всех процессов перезакрепления (перестановки) и загрузки приходится затратным образом демонтировать, а после этого снова монтировать и выравнивать, поскольку в противном случае существовала бы опасность, что качающиеся при транспортировке трубы могли бы вызвать повреждения. Это, как правило, означает, существенную задержку процессов гибки, что значительно ограничивает производительность гибочной машины.
Поэтому задачей изобретения является создание устройства, сокращающего и упрощающего процессы перезакрепления и загрузки труб и тем самым повышающего достижимую пропускную способность таких машин и, таким образом, их экономичность.
Задача решается с помощью трубного манипулятора для перемещения труб для использования в устройстве для гибки труб большого диаметра, причем
- в этом устройстве для гибки труба направляется в аксиальном направлении через нагревательное устройство, кольцеобразно обхватывающее эту трубу,
- в расположенной в направлении подачи трубы части устройства для гибки имеется по меньшей мере одно гибочное плечо,
- причем гибочный фиксатор, находящийся на гибочном плече, жестко обхватывает подлежащий гибке участок трубы и во время подачи трубы перемещается вокруг гибочной оси вращения,
- у конца трубы смонтирована с возможностью смещения в подающем устройстве аксиально подвижная в направлении подачи трубы приемная пиноль,
- приемная пиноль действует на трубу изнутри и при этом зажимает трубу изнутри,
- приемная пиноль заданным образом аксиально направляет трубу через нагревательное устройство вплоть до переднего зажимного устройства.
Благодаря этому можно отказаться от демонтажа и повторного монтажа индуктивного кольца, поскольку труба может быть прецизионно пропущена через индуктивное кольцо, пока задний конец трубы не сможет быть зажат на достаточном удалении перед индуктивной системой без того, чтобы нужно было опасаться отклоняющих движений трубы с разрушительным действием. Приемная пиноль создает усилие посредством которого труба направляется через нагревательное устройство. При этом трубный манипулятор по существу состоит из приемной пиноли и устройств, служащих для перемещения приемной пиноли в аксиальном направлении, причем последние соответствуют обычным подающим устройствам согласно традиционному уровню техники.
Для разрешения таких трудностей в уровне техники уже описаны и другие зажимные устройства для подачи труб. DE 26 30 967 учит на этот счет, что трубы необходимо сгибать и с помощью зажимной оправки извлекать из гибочного устройства без необходимости удаления индуктивного кольца. Правда, зажимная оправка не используется для подачи, а также в качестве инструмента для захвата трубы и ее подачи в трубогибочную машину.
В DE 31 47 688 А1 описано скоростное трубозажимное устройство, с помощью которого должна достигаться минимально возможная, несгибаемая длина трубы на зажимаемом конце, причем посредством пальцеобразной разжимной цанги с несколькими распределенными по окружности продольными шлицами достигается радиальное зажимное движение. Для этого разжимная цанга также надевается с одного конца сгибаемой трубы. Однако при такой технологии компенсируются лишь незначительные различия в толщине стенок, и инструмент не может быть использован для большого спектра диаметров труб. К тому же через нагревательное устройство не удается пропустить задний конец трубы.
Другие цанговые зажимы для труб описаны в DE 1 966 496 U и US 2,862,540. Однако и они непригодны для приема больших труб переменных диаметров и для индуктивной гибки в трубогибочных машинах.
В одном из вариантов выполнения изобретения предусмотрено, чтобы приемная пиноль фиксировала подлежащую гибке трубу по меньшей мере в двух плоскостях фиксации, расположенных перпендикулярно горизонтальной центральной оси трубы. Таким расположенным с внутренней стороны трубы приемным приспособлением трубу можно фиксировать таким образом, чтобы она не могла сдвигаться ни в продольном, ни в тангенциальном направлениях. Обе плоскости фиксации должны быть разнесены настолько, чтобы они могли надежно воспринимать большие рычажные усилия без возникновения деформаций в точках приложения усилий к трубам. Для поддержки могут быть предусмотрены дополнительные плоскости фиксации.
В одном другом варианте выполнения изобретения предусмотрено, чтобы фиксация в каждой из плоскостей фиксации осуществлялась фрикционным способом посредством удерживающих устройств, прижимаемых к трубе изнутри. При этом вследствие больших усилий необходимо иметь в виду заданные, ограничиваемые усилия нажима и достаточные поверхности для приложения усилий.
В одном другом варианте выполнения изобретения предусмотрено, чтобы удерживающие устройства в каждой плоскости были образованы удерживающими рычагами, имеющими на своих наружных концах элементы для приложения усилий для внутренней стороны труб, причем удерживающие рычаги приводятся в действие гидравлической системой внутри приемной пиноли и при этом разжимаются концентрично. При этом удерживающие рычаги могут быть расположены одинаково или противоположно. В случае одинаковой направленности поверхности для приложения усилий различных плоскостей фиксации могут быть также соединены друг с другом.
В одном другом варианте выполнения изобретения предусмотрено, чтобы в каждой из плоскостей фиксации было предусмотрено 3, 4, 5 или 6 удерживающих рычагов, причем удерживающие рычаги равномерно распределены по окружности (периметру).
В одном другом варианте выполнения изобретения предусмотрено, чтобы приемная пиноль была вращающейся. Это облегчает зажим при многократных изгибах и обеспечивает трубе после нескольких, возможно, пространственно сложных гибочных процессов такое вращение, чтобы обеспечивалась надежное извлечение трубы.
Изобретение относится также к способу загрузки и направления трубы до и после гибочного процесса с помощью соответствующего изобретению устройства со следующими этапами:
а) позиционирование подлежащей гибки трубы аксиально на одной прямой перед трубным манипулятором,
б) введение приемной пиноли трубного манипулятора с задвинутыми удерживающими рычагами в трубу, пока внутри трубы не окажется по меньшей мере две плоскости фиксации,
в) гидравлическое выдвижение удерживающих рычагов до тех пор, пока труба не станет удерживаться приемной пинолью,
г) втягивание трубы через замкнутое индуктивное кольцо до положения, при котором труба сможет быть зажата в подающей тележке,
д) смещение и одновременная гибка трубы с помощью индуктивного нагрева,
е) выталкивание изогнутой трубы по окончании гибочного процесса через замкнутое, но отключенное индуктивное кольцо вплоть до переднего зажимного устройства,
ж) зажим трубы в фиксаторе гибочного плеча,
з) гидравлический ввод удерживающих рычагов,
и) выдвижение приемной пиноли из трубы,
к) отправка (транспортировка прочь) трубы.
Таким образом, нет необходимости в позиционировании трубы в гибочной машине с помощью кранов. Кроме того, обычные гибочные процессы могут осуществляться без ожидания того, пока охладится труба, что существенно повышает производительность, поскольку это существенно ускоряет весь гибочный процесс. Затем отправка может производиться простым способом, например, с помощью крана.
Во время гибочного процесса необходимо следить за тем, чтобы удерживающие рычаги не были выдвинуты, когда поверхности для приложения усилий находятся вблизи индуктивного кольца, а находились в парковочном (нерабочем) положении.
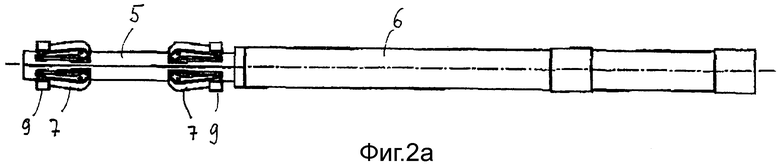
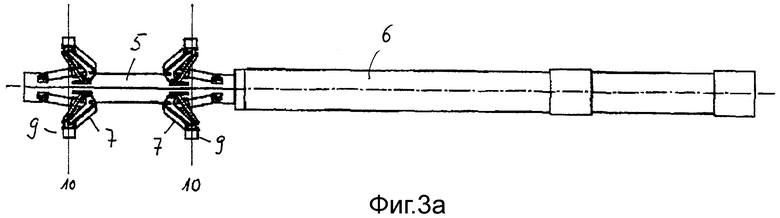
Ниже изобретение более подробно поясняется на девяти схемах. При этом фиг.1 дает обзор частей гибочной машины и показывает их взаимодействие с трубным манипулятором. На фиг.2а-2d изображена приемная пиноль с задвинутыми, на фиг.3а-3d - с выдвинутыми поддерживающими рычагами.
На фиг.1 изображена гибочная машина с гибочным фиксатором (замком) 1, гибочной осью 2 вращения, позади которого в той же плоскости расположено также индуктивное кольцо 3. На передней части подающей тележки 4 находится приемная пиноль 5, соединенная с подающей штангой 6 и содержащая удерживающие рычаги 7. Приемная пиноль 5, подающая штанга 6 и удерживающие рычаги 7 образуют трубный манипулятор. Вставленная труба 8 показана до индуктивного кольца 3, а затем обозначена штрихами только в негнутом состоянии.
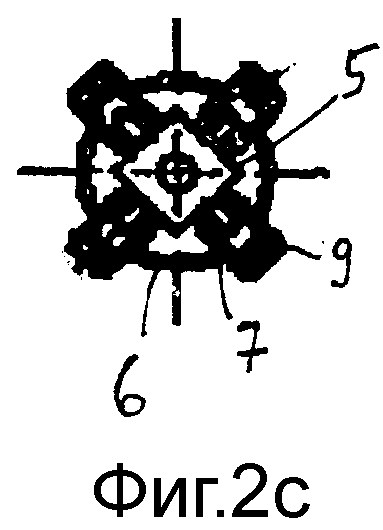
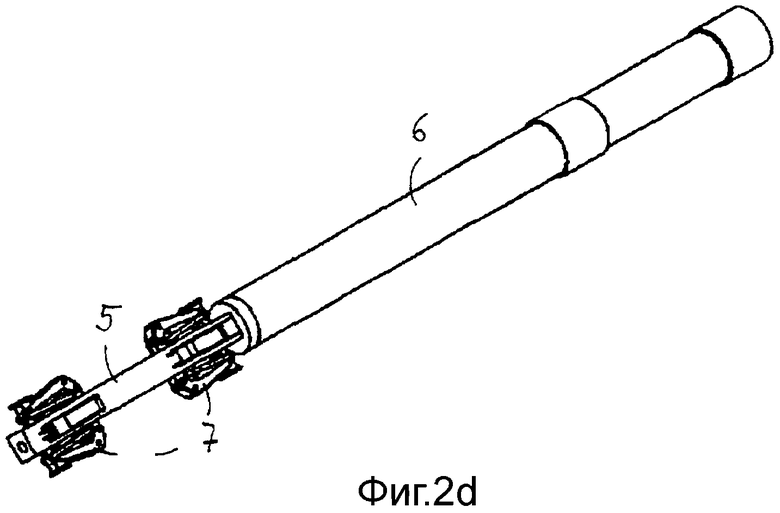
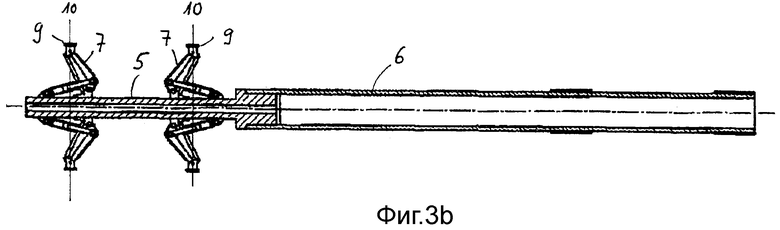
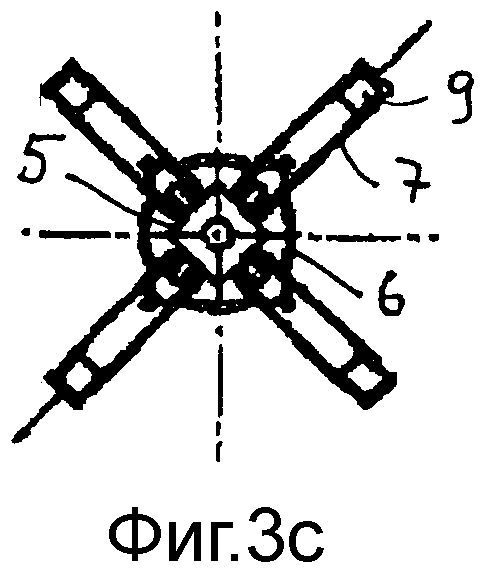
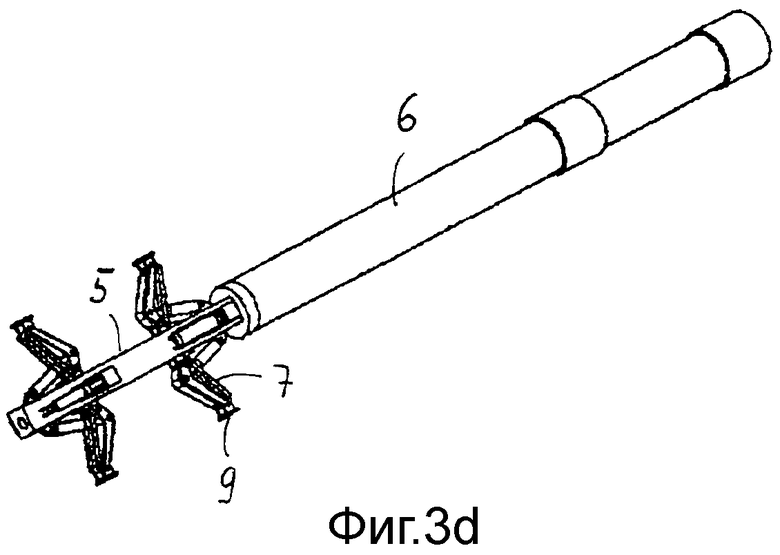
На фиг.2а изображен вид сбоку трубного манипулятора, состоящий из приемной пиноли 5, подающей штанги 6, четырех удерживающих рычагов 7 в задвинутом состоянии и поверхностей 9 для приложения усилий. На фиг.2b изображен разрез под углом 45°, на фиг.2с - вид спереди в осевом направлении и на фиг.2d - вид в изометрии. Аналогичным образом на фиг.3а изображен вид сбоку трубного манипулятора, состоящего из приемной пиноли 5, подающей штанги 6, четырех удерживающих рычагов 7 в выдвинутом состоянии и их поверхностями 9 для приложения усилий. При этом изображены также плоскости 10 фиксации. На фиг.3b изображен разрез под углом 45°, на фиг.3с - вид спереди в осевом направлении и на фиг.3d - вид в изометрии.
Перечень позиций
1 гибочный фиксатор
2 гибочная ось вращения
3 индуктивное кольцо
4 подающая тележка
5 приемная пиноль
6 подающая штанга
7 удерживающий рычаг
8 труба
9 поверхность для приложения усилий
10 уровень фиксации
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБОЧНАЯ МАШИНА ДЛЯ ЛЕВЫХ И ПРАВЫХ ГИБОВ | 2011 |
|
RU2560889C2 |
| УСТРОЙСТВО И СПОСОБ ГИБКИ ТРУБ | 2008 |
|
RU2457057C2 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2015 |
|
RU2614975C1 |
| Трубогибочный комплекс | 1987 |
|
SU1470389A1 |
| СТАНОК ДЛЯ ГИБКИ ТРУБ | 2019 |
|
RU2772761C2 |

Изобретение относится к трубному производству и может быть использовано для загрузки и отгрузки труб большого диаметра. Труба подается в аксиальном направлении через нагревательное устройство индуктивного действия, кольцеобразно обхватывающее эту трубу. У конца трубы предусмотрена приемная пиноль с возможностью аксиального перемещения в направлении подачи трубы, жестко соединенная с устройством для гибки труб. Причем приемная пиноль фиксирует трубу изнутри и создает аксиальное усилие для проталкивания трубы через нагревательное устройство индуктивного действия до фиксации ее заднего конца в переднем зажимном замке на гибочном плече. Улучшается позиционирование трубы и повышается надежность ее извлечения. 2 н. и 2 з.п. ф-лы, 3 ил.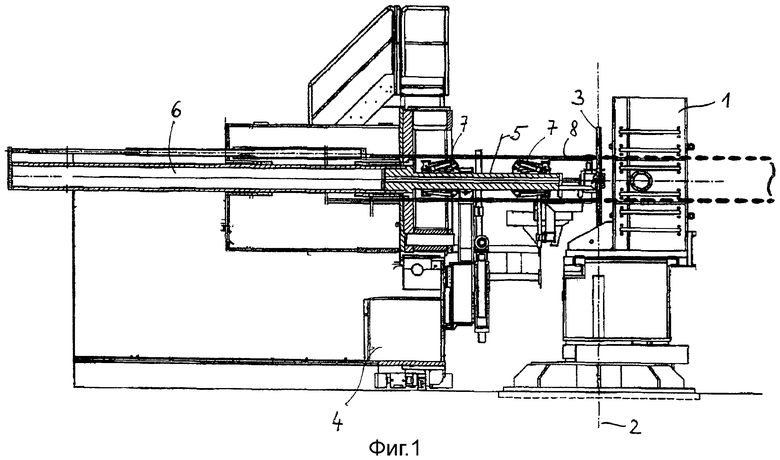
1. Трубный манипулятор для перемещения труб (8) для использования в устройстве для гибки труб большого диаметра, причем
- в этом устройстве для гибки труба направляется в аксиальном направлении через нагревательное устройство (3), кольцеобразно обхватывающее эту трубу,
- в части устройства для гибки, расположенной в направлении подачи трубы, имеется по меньшей мере одно гибочное плечо,
- гибочный фиксатор (1), находящийся на гибочном плече, жестко обхватывает подлежащий гибке участок трубы и во время подачи трубы перемещается вокруг гибочной оси (2) вращения,
отличающийся тем, что
- у конца трубы (8) установлена с возможностью смещения в подающем устройстве (4) аксиально смещаемая в направлении подачи трубы приемная пиноль (5),
- приемная пиноль (5) действует на трубу (8) изнутри и при этом фиксирует трубу (8) изнутри,
- приемная пиноль (5) выполнена с возможностью аксиального направления трубы (8) заданным образом через нагревательное устройство (3) в переднее зажимное устройство, а также
- приемная пиноль (5) выполнена с возможностью фиксации подлежащей гибке трубы (8) по меньшей мере в двух плоскостях (10) фиксации, расположенных перпендикулярно центральной оси трубы, причем фиксация в каждой из плоскостей (10) фиксации осуществляется фрикционным способом посредством удерживающих устройств (7, 9), прижимаемых к трубе (8) изнутри, и
- приемная пиноль (5) выполнена с возможностью вращения.
2. Трубный манипулятор по п.1, отличающийся тем, что удерживающие устройства (7, 9) в каждой плоскости (10) фиксации образованы удерживающими рычагами (7), имеющими на своих наружных концах элементы (9) для приложения усилий для внутренней стороны трубы, причем удерживающие рычаги (7) приводятся в действие гидравлической системой внутри приемной пиноли (5) и при этом разжимаются концентрично.
3. Трубный манипулятор по п.2, отличающийся тем, что в каждой из плоскостей (10) фиксации предусмотрено 3, 4, 5 или 6 удерживающих рычагов (7), причем удерживающие рычаги (7) равномерно распределены по окружности.
4. Способ загрузки и направления трубы (8) до и после гибочного процесса с помощью трубного манипулятора по любому из пп.1-3, характеризующийся следующими этапами:
а) позиционированием подлежащей гибки трубы (8) аксиально на одной прямой перед трубным манипулятором,
б) введением приемной пиноли (5) трубного манипулятора с задвинутыми удерживающими рычагами (7) в трубу (8) до тех пор, пока внутри подлежащей гибке трубы (8) не окажется по меньшей мере две плоскости (10) фиксации,
в) гидравлическим выдвижением удерживающих рычагов (7) до тех пор, пока труба не станет удерживаться приемной пинолью (5),
г) втягиванием трубы (8) через замкнутое индуктивное кольцо (3) до положения, при котором труба (8) сможет быть зажата в подающей тележке (4),
д) смещением и одновременной гибкой трубы (8) с помощью индуктивного нагрева,
е) выталкиванием изогнутой трубы (8) по окончании гибочного процесса через замкнутое, но отключенное индуктивное кольцо (3) вплоть до переднего зажимного устройства,
ж) зажимом трубы в фиксаторе (1) гибочного плеча,
з) гидравлическим вводом удерживающих рычагов (7),
и) выдвижением приемной пиноли (5) из трубы (8),
к) отправкой трубы (8).
| Способ гибки металлических труб | 1980 |
|
SU1175353A3 |
| Фотодатчик | 1986 |
|
SU1442832A1 |
| Устройство для гибки труб | 1987 |
|
SU1503931A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ОТВОДОВ | 1995 |
|
RU2100117C1 |

